
Abstract
Beidou satellites, especially geostationary earth orbit (GEO) and inclined geosynchronous orbit (IGSO) satellites, need to be frequently maneuvered to keep them in position due to various perturbations. The satellite ephemerides are not available during such maneuver periods. Precise estimation of thrust forces acting on satellites would provide continuous ephemerides during maneuver periods and could significantly improve orbit accuracy immediately after the maneuver. This would increase satellite usability for both real-time and post-processing applications. Using 1 year of observations from the Multi-GNSS Experiment network (MGEX), we estimate the precise maneuver periods for all Beidou satellites and the thrust forces. On average, GEO and IGSO satellites in the Beidou constellation are maneuvered 12 and 2 times, respectively, each year. For GEO satellites, the maneuvers are mainly in-plane, while out-of-plane maneuvers are observed for IGSO satellites and a small number of GEO satellites. In most cases, the Beidou satellite maneuver periods last 15–25 min, but can be as much as 2 h for the few out-of-plane maneuvers of GEO satellites. The thrust forces acting on Beidou satellites are normally in the order of 0.1–0.7 mm/s2. This can cause changes in velocity of GEO/IGSO satellites in the order of several decimeters per second. In the extreme cases of GEO out-of-plane maneuvers, very large cross-track velocity changes are observed, namely 28 m/s, induced by 5.4 mm/s2 thrust forces. Also, we demonstrate that by applying the estimated thrust forces in orbit integration, the orbit errors can be estimated at decimeter level in along- and cross-track directions during normal maneuver periods, and 1–2 m in all the orbital directions for the enormous GEO out-of-plane maneuver.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Satellites tend to gradually deviate from their predefined orbits due to various perturbations. When this happens, the satellite master control station needs to take action to reposition satellites to keep their optimal constellation. This procedure is known as an orbital maneuver. Orbital maneuvers for operational satellites can be classified into two categories: in-plane maneuver and out-of-plane maneuver. An in-plane maneuver is generally implemented in the along-track direction, while an out-of-plane maneuver also applies a thrust force in the cross-track direction (Kelecy et al. 2007; Song et al. 2012). The frequency of maneuvers largely depends on the characteristics of orbits, especially on their rotation periods (Hugentobler 1998). Due to the ellipticity of earth’s equator, the resonance effect can lead to constant along-track acceleration for a GEO satellite, resulting in significant longitude drift (Sehnal 1960). Moreover, the gravitational effects of the Sun, the Moon, as well as the Solar Radiation Pressure (SRP) also play important roles in satellite perturbations (Steigenberger et al. 2013).
The Chinese Beidou Navigation Satellite System (BDS) has a mixed constellation, consisting of 5 GEO satellites, 5 IGSO satellites and 4 Medium Earth Orbit (MEO) satellites, providing Asia regional coverage since 2012. Global coverage will be achieved by 2020 with a constellation of 5 GEO, 3 IGSO and 27 MEO satellites (BeiDou 2013). For GEO and IGSO satellites, the 1:1 commensurability between their orbital period and the earth rotation period indicates that the resonance of satellite motion with geo-potential terms is quite obvious; the mean semimajor axes of GEO satellites may vary by ± 35 km due to the long-period liberation of 1000–2000 days (Hugentobler et al. 1999). This is the reason for implementing frequent east–west (along-track) station-keeping maneuvers for Beidou satellites (Du et al. 2014). It was reported that Beidou in-orbit GEO satellites needed east–west (along-track) station-keeping maneuvers every 25–35 days and north–south (cross-track) maneuvers about every 2 years (Xie et al. 2012). In addition, for IGSO satellites, the regular maintenance cycle was about 180 days (Prange et al. 2016). In 2013, a 50-day study of Beidou GEO satellites also presented that one to two maneuvers were executed for each satellite and that the dominant velocity change is in the along-track direction, reaching up to 100 mm/s (Dach et al. 2009; Steigenberger et al. 2013).
Frequent Beidou satellite maneuvers cause interruptions to satellite usability that may affect user positioning accuracy and availability. If the satellite maneuver can be successfully detected and the thrust forces accurately estimated, the satellite orbit during or shortly after maneuver can be precisely determined, and the satellite usability improved.
Much effort has been made to detect satellite maneuvers. Major maneuver detection and orbit determination techniques include: (1) the use of the satellite two-line element (TLE) time history data (Kelecy et al. 2007; Patera 2008), which can reliably detect satellite thrust maneuvers down to centimeter per second level or less, but due to the inaccuracy of the raw TLE data, quite a large time lag of about 2–3 days can be induced into the detected maneuvers; (2) estimating thrust force parameters with precise observations; indeed, some researchers prefer the short-arc orbit determination strategy (Zhang et al. 2013). Generally speaking, orbital maneuvers can be modeled as instantaneous velocity change in the radial (R), along-track (A) and cross-track directions (C) (Beutler et al. 1994; Jäggi et al. 2012), or as constant thrust forces in RAC directions lasting a period of time (Ju et al. 2017), or as rectangular range profile combined with post-maneuver sinusoids proposed by the navigation support office of European Space Operations Centre (ESOC) (Gienger and Pereira 2012). The first model is also known as an impulsive maneuver, and the last two are non-impulsive.
Low Earth Orbit (LEO) satellite maneuvers can be relatively easily handed with precise GPS observations in the reduced-dynamic orbit determination mode. Orbit determination modules for LEO satellites during maneuver have been developed in many software packages based on the above maneuver models, such as the EPOS, Bernese, GHOST and NUDTTK (Jäggi et al. 2012; Ju et al. 2017; Yoon et al. 2006). Centimeter-level orbit accuracy can be obtained for LEO maneuver satellites after calibration with these software packages (Ju et al. 2017; Yoon et al. 2006).
Compared to LEO satellites, maneuvers of navigation satellites are much more difficult to calibrate due to their high altitudes and a limited number of tracking stations. The ESOC’s navigation support office has proposed a method to automate detection of orbital maneuvers for GNSS satellites. It is realized by first identifying the maneuver period with an a priori orbit, where the maneuver start time is defined when pseudorange residual exceeds the detection limit and end time is defined by the equation
where △v denoting the maneuver magnitude and maxAcc representing the average acceleration generated by continuous firing of the corresponding satellite and then estimating the maneuver start and end times, magnitude (Δv) and post-maneuver sinusoids, according to the rectangular range profile combined with the post-maneuver sinusoids maneuver model. The start time of a maneuver can be easily detected with an accuracy of a few minutes, but it is difficult to determine the end time due to the fact that the simulated/computed range data are synchronized with ionospheric-free phase and range data at the start of the pass. The satellite orbit is no longer smooth due to thrust force, and the reference orbit used for range computation does not fit the post-maneuver trajectory. The end time would be better determined by creating another set of simulated range data which synchronized with data at the end of the pass (Gienger and Pereira 2012). The classical maneuver detection procedure adopted at the Center for Orbit Determination in Europe (CODE) for the International GNSS Services (IGS) is based on the closest approach of two arcs calculated separately before and after the maneuver, where the instantaneous velocity change is determined as the difference between these two arcs at this point (Dach et al. 2009; Steigenberger et al. 2013). This method can effectively detect satellite maneuvers and shorten the post-maneuver recovery time for GNSS satellites. However, it treats the maneuvering process just as an impulse, while in fact, satellite maneuver thrust forces can last a period of time. Therefore, satellite maneuvers detected this way do not reflect the physical influence of thrust forces and fail to provide continuous orbits during maneuver periods.
Currently, Beidou IGSO/MEO satellite orbits have an accuracy of 1–2 dm during normal operation, and GEO orbits can be determined with decimeter-level accuracy in the radial direction and have 1–2 m 3-dimensional accuracies (Lou et al. 2016; Zhao et al. 2013). However, in case of a maneuver, the satellite precise ephemeris is not available on the day of the maneuver and even the days before or after the maneuver. Beidou satellite orbits during and shortly after maneuver periods may be improved by studying the feature of thrust forces. Precise estimation of maneuver start and end times, as well as the thrust amplitude, are greatly beneficial for precise orbit recovery.
We propose a procedure for Beidou satellite maneuver detection and estimation, including maneuver period detection, thrust-influenced position and velocity drift estimation, and thrust force estimation, using observations from the MGEX network. In the next sections, we first briefly describe the methodology to detect satellite maneuver and estimate the thrust force. Then, the description is focused on the experiments and results obtained from 1 year of observation data (April 2014 to March 2015) from MGEX. Thereafter, validation of the estimated thrust forces is given, followed by conclusions in the last section.
Satellite maneuver detection and thrust force estimation
Satellite maneuvers are executed by thrust forces, which generate accelerations for the satellites to change their velocities and thus positions. The thrust forces are different from the natural perturbation forces which can be modeled and corrected, and they are generally unexpected and unknown. This characteristic of thrust forces leads to the failure of successive orbit determination for the satellite during maneuver period. If the maneuver forces can be precisely known and integrated into the dynamical models, satellite orbit can also be determined even during the maneuver period.
To obtain thrust forces acting on Beidou satellites, we need to identify the exact periods when orbital maneuvers take place. Two data sources, including broadcast ephemerides and ground tracking data, are used for this purpose. Normally, after an orbital maneuver, the Kepler elements of the orbit will have changed significantly, and therefore, by examining discontinuity of Kepler elements from consequent broadcast ephemeris for all satellites, potential periods of maneuver can be detected. Also, during and shortly after maneuvers, the broadcast ephemerides are normally set to “unhealthy”; this serves as another indicator. To even further narrow down the exact start and end times of any maneuver, carrier-phase triple-difference observations from ground monitoring stations are used. Using the broadcast ephemerides before the maneuver starts to estimate satellite positions, the ionospheric delay reduced by dual-frequency combination, site-specific tropospheric delay estimated beforehand in a separate precise point position (PPP) process with GPS observations using the Global Mapping Function (GMF) and the hydrostatic zenith delay eliminated according to Saastamoinen model, one should find that the triple-difference residuals are close to zero. As is shown in the triple-difference observation equation
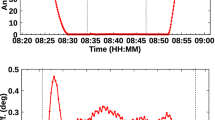
where A and B stand for different stations, j and k denote different satellites, and t1 and t2 are the two successive observation epochs, \(\phi_{AB}^{jk} (t_{2} )\) and \(\phi_{AB}^{jk} (t_{1} )\) represent the double-differenced carrier-phase observables divided the wavelength \(\lambda\), and \(N_{AB}^{jk} (t_{2} )\) and \(N_{AB}^{jk} (t_{1} )\) are the double-differenced ambiguities, and \(\rho_{AB}^{jk} (t_{2} )\) and \(\rho_{AB}^{jk} (t_{1} )\) denote the double-differenced geometrical distances between stations and satellites. Apart from the canceling of satellite and receiver clock errors in double-difference process, the ambiguities are also effectively canceled in triple differencing. Since the normal satellite orbits are very smooth and can be well predicted by the broadcast ephemerides, the geometric distances between satellite and receiver can be accurately calculated. Therefore, quasi-zero triple-difference residuals can be expected. However, during a maneuver, as the calculated satellite positions drift away from the true positions and the calculated geometric distances are not right, the triple-difference residuals can shift away from zero as well. Immediately after the maneuver, the position changes of satellites become smooth again, and so do the triple-difference residuals. Figure 1 shows the triple-difference residuals with seven ground stations during the maneuver period of satellite C08 on January 9, 2015. All of the double-difference observations are formed with observables between the satellite C08 and the station SIN1, which is in the middle of the tracking network, as shown in Fig. 2 of the next section; the other satellite and station involved in the differential observations are marked in the figure. As can be seen, the start and end times of this maneuver can be clearly identified.

Triple-difference residuals during the maneuver period of satellite C08 on January 9, 2015. All the differential observations are formed among satellite C08, station SIN1 and another satellite/station marked in the figure

Observation network in kinematic orbit determination of satellite C08 on January 9, 2015
In order to extract thrust forces acting on a satellite, we need to identify the satellite movement due to the thrust forces. This can be achieved by comparing the orbits obtained from kinematic orbit determination and orbit integration without considering the thrust forces. Kinematic orbit determination utilizes GNSS measurements from a ground tracking network, without using any force models. Thus, the orbit movements from this method include all forces acting on the satellite. On the other hand, any orbit obtained through orbit integration method results from the integrations of forces. Without considering the thrust forces, the orbit differences between the kinematic and integration solutions must be caused by the thrust forces.
In data processing, kinematic orbit determination is performed from about 10 min before a maneuver to half an hour after. During this period, we only select those stations with continuous carrier-phase measurements, as this will ensure that there are no jumps in positions due to station changes. The measurement sampling interval we used is 30 s. The carrier-phase double-difference ionospheric-free combinations are used for satellite position determination, which will cancel most Beidou measurement errors. The tropospheric delay is corrected by the GMF and Saastamoinen model. Since only relative positions are required for this study, the initial ambiguities are fixed to constants at the starting epoch, where the satellite position is from the broadcast ephemeris. Also, the satellite position and velocity from broadcast ephemeris serve as the initial state for orbit integration. The reference frames and orbit models adopted during orbit integration are listed in Table 1. No SRP model was applied in the orbit integration, as most Beidou satellite maneuvers only last for about 20 min, and the resulting orbit errors due to the neglected SRP effect are negligible.
To estimate changes in satellite velocity and acceleration due to maneuvering, the orbits derived from kinematic orbit determination and integration were compared. First, the differences of Kepler elements, position and velocity derived from these two methods are calculated. Then, the thrust-induced acceleration is also computed by the differential of change in velocity. Since the kinematic orbit is quite noisy, caused by measurement noises and poor geometry, a low-pass filter is used to reduce high-frequency noises in both velocity and acceleration estimation. It has been noticed that orbit change due to maneuvering can affect other perturbation forces, e.g., earth gravitational perturbation, and this can also lead to further orbit change. Therefore, the acceleration derived from orbit difference only approximately shows the true thrust forces. More accurate thrust forces are estimated through orbit fitting for the kinematic orbit, assuming constants or linear changes based on the approximate forces.
Experiments and results
We analyzed orbital maneuvers of all Beidou satellites for a period of 1 year (April 1, 2014, to March 31, 2015). The broadcast ephemerides are used for initial state calculation of maneuvered satellites; the precise ephemerides are used to provide the positions of other satellites in kinematic orbit determination, using observations taken from MGEX carrier-phase measurements.
For kinematic orbit determination, the number of MGEX stations available during the study period is limited. Although the numbers of stations tracking GEO and IGSO satellites were more than 10 and 30, respectively, about 5–20 stations were used in different cases of satellite maneuvering due to the requirement of successive tracking and no cycle slips during the orbit determination period. The limited number of tracking stations would lead to poor observation geometry and thus the low orbit determination accuracy. An example of the tracking network is shown in Fig. 2.
To investigate the precision of kinematic orbit determination, the Position Dilution Of Precision (PDOP), which reflects the observation geometry, has been calculated for different satellites. Also, the DOPs in radial and horizontal directions of each satellite are analyzed, donated as the Vertical DOP (VDOP) and Horizontal DOP (HDOP). For simplicity, only the values of GEO satellite C03 and IGSO satellite C08 are listed (Table 2). Only 6 stations were available for C03 on May 5, 2014, and the PDOP was quite large, more than 260. The PDOPs of C03 and C08 ranged from around 100–200 during the rest of the maneuver days. On the other hand, the HDOPs were distinctly smaller and reduced by a factor of 10–20 compared to the VDOPs. Kinematic orbit determination has been done for two GEO and two IGSO satellites which were not maneuvered by the proposed method, and orbit accuracies were evaluated by comparing with precise ephemerides. The orbit determination period was 11:30–12:30 on January 5, 2015, and the HDOPs and VDOPs of the four satellites C02, C05, C06 and C09 were (10.09, 213.99), (7.84, 115.56), (11.90, 165.10) and (11.66, 123.99), respectively. The differences between the kinematic and precise orbits in RAC directions are shown in Fig. 3. The RMSs in the radial direction were somewhat large, at about 1.3 and 1.2 m for GEO and IGSO satellites, while in the along- and cross-track directions were just 0.03, 0.1 m for GEO and 0.08, 0.07 m for IGSO satellites, respectively. The better orbit accuracies in along- and cross-track directions are corresponding to the superior geometry strength in the horizontal direction.

Coordinate difference between kinematic and precise orbits for satellites C02, C05, C06 and C09. The orbit determination period is during 11:30–12:30 on January 5, 2015
In regard to the integrated orbit, an orbit was also computed for the unmaneuvered satellite C03 and compared with the precise orbit (Fig. 4). The integration process started at 13:20 on January 9, 2015. Coordinate drifts in RAC directions were all at decimeter level for an integration length of 80 min. The drifts in the first half hour were less than 3 dm. The Beidou satellites normal maneuver periods are just around 20 min.

Coordinate difference between integrated and precise orbits for satellite C03 since 13: 20 on January 9, 2015
From triple-difference residuals and the differences of these two orbit determination results, the Beidou satellite maneuver periods, the changes in velocity and Kepler elements, as well as thrust-force-induced accelerations have been obtained. They are listed and analyzed in the rest of this section.
Maneuver periods
First, we try to identify maneuver periods for all Beidou satellites during the study period. There are 9–15 maneuvers for each GEO satellites, 2 maneuvers per IGSO satellites and no MEO satellite maneuvers listed in Table 3.
The unhealthy broadcast ephemerides epochs and exact maneuver periods of one GEO (C03) and one IGSO (C08) satellite are listed in Table 4. As can be seen, the Beidou broadcast ephemerides are set to “unhealthy” for a period of 6–8 h during maneuver periods. For the exact periods when thrust was being applied, they mostly range from 20 to 25 min for GEO satellites and 11 to 22 min for IGSO satellites. Extremely long maneuver periods of 2 h or more are found for GEO satellites, e.g., satellite C03 on October 20, 2014. This is due to the biannual north–south maneuver frequency reported in (Xie et al. 2012).
Figure 5 shows three examples of the satellite coordinate offsets in RAC directions due to the normal GEO maneuver, C03 on January 05, 2015, the IGSO maneuver, C08 on January 09, 2015, and the extreme large GEO out-of-plane maneuver, C03 on October 20, 2014. For normal maneuvers, the time interval ranges from about 10 min before the maneuver to 7 min (C03) or 14 min (C08) after the maneuver. It is explicitly shown that the thrust forces are executed mainly in the along-track direction for C03 on January 5, 2015, and satellite position can deviate more than 200 m in a half hour. For C08, the maneuver is implemented in both along- and cross-track directions, and its position can shift more than 800 and 200 m in these directions, respectively, during a half-hour period. Exceptionally large cross-track coordinate shifts have been observed for C03 on October 20, 2014, and plotted separately on the bottom right. The period ranges from about 5 min before to 10 min after the maneuver, and the orbit changes in RAC directions are approximately 700, 1500 and \(1.4 \times 10^{5}\) m, respectively.

Maneuvered satellites coordinate shifts in RAC directions. Satellite C03 on January 05, 2015 (top left), C08 on January 09, 2015 (top right) and C03 on October 20, 2014 (bottom)
Change of velocity and Kepler elements
Satellite velocity and Kepler elements change differently in different maneuver situations. The results show that all the IGSO satellites experience changes in velocity in both along- and cross-track directions of 0.4–0.6 and 0.1–0.5 m/s, respectively; GEO satellites normally experience change of velocity only in the along-track direction, with Δv ranging from about 0.1–0.15 m/s, but out-of-plane maneuvers also take place as exceptions to the rule as earlier mentioned. For simplicity, Table 5 only lists velocity changes due to maneuvers of GEO C03 and IGSO C08 in the study period. It shows that C03 normal maneuvers are in-plane and that velocity in the along-track direction decreases of 0.13–0.15 m/s. One exceptional case is on October 20, 2014, when the satellite has an out-of-plane maneuver and the velocity in the cross-track direction decreases by nearly 28.0 m/s. In regard to C08, out-of-plane maneuvers are implemented and the velocities reduce by about 0.6 and 0.1 m/s in the along- and cross-track directions, respectively.
Figure 6 plots the changes of velocity of the maneuvered satellites, which are the same as those in Fig. 5. For the in-plane maneuver of C03 on January 5, 2015, the along-track velocity decreases by 0.15 m/s and velocities in other two directions are merely changed. The satellite C08 on January 9, 2015, goes through an out-of-plane maneuver, and velocity in the along- and cross-track directions drops and increases by 0.6 and 0.12 m/s, respectively. Special attention has been paid to the rare case of the GEO satellite out-of-plane maneuver, i.e., C03 on October 20, 2014. Different from normal maneuvers, where the satellite velocities simply either increase or decrease, the velocity change of the GEO out-of-plane maneuver is more complex. The satellite cross-track velocity decreases rapidly by about 28.0 m/s due to an almost constant acceleration in the first 100 min since the maneuver starts; meanwhile, the along-track velocity increases steadily by 0.42 m/s. Then after a time lag of around 5 min, the along-track velocity change comes back quickly to almost zero in approximately 13 min. In this whole process, the velocity in the cross-track direction reduces by 28.0 m/s and increases by 0.11 m/s in the radial direction, and there is a tiny change in the along-track direction.

Maneuvered satellite velocity changes in RAC directions. Satellite C03 on January 5, 2015 (top left), C08 on January 9, 2015 (top right) and C03 on October 20, 2014 (bottom)
The Kepler elements, i.e., the semimajor axis (a), eccentricity (e), inclination angle (i), argument of ascending node (Ω), argument of perigee (ω), and mean anomaly (M), change differently according to maneuver types. For the two types of maneuvers, the in-plane maneuvers mainly increase/decrease a and e, and the out-of-plane maneuvers mainly change the orbital plane orientation elements. Satellite Kepler elements during maneuver period are derived epoch-wise based on the position and velocity vectors of the kinematic solution. They have been filtered to reduce observation noises. Comparisons of Kepler element changes since the initial epoch between kinematic and integrated orbits for the in-plane GEO maneuver, out-of-plane IGSO maneuver, and the exceptional case of GEO out-of-plane maneuver are shown in Figs. 7, 8 and 9, respectively. As shown in Fig. 7, elements representing the satellite ellipse size (a), shape (e), orientation inside the orbital plane (ω), and mean position of the satellite in the ellipse (M) have changed explicitly through the in-plane maneuver of C03. Due to the large along-track velocity change of C08, the changes of a and e are much larger than those of C03. Orbital plane orientation elements i and Ω are also adjusted due to the out-of-plane maneuver of C08. However, the changes can almost be ignored compared to the significant drops of i and Ω through the C03 extreme out-of-plane maneuver. The i and Ω of C03 have changed by about 0.38 and 15 deg due to the out-of-plane maneuver, respectively, which are approximately 160 and 37,500 times larger than the variations in C08. In addition, other Kepler elements of C03 on December 20, 2014, e.g., a, ω and M, grow or reduce steadily first and then reverse the change in the last 13 min. On the other hand, by comparison of Figs. 6, 7, 8 and 9, it can be found that the semimajor axis has the same change pattern with the velocity change in the along-track component: when velocity in the along-track direction decreases, the satellite will be attracted much more by earth gravity hence the reduction in semimajor axis, and vice versa. This phenomenon is in accordance with the law of conservation of energy.

Kepler element changes of kinematic (blue) and integrated orbits (red) for satellite C03 on January 5, 2015

Kepler element changes of kinematic (blue) and integrated orbits (red) for satellite C08 on January 9, 2015

Kepler element changes of kinematic (blue) and integrated orbits (red) for satellite C03 on October 20, 2014
Figure 10 compares the Kepler elements from broadcast ephemerides before and after the maneuver to the kinematic orbit for satellite C03 on October 20, 2014, as an instance. Similarly, it plots the change of Kepler elements with respect to the state at epoch 0. It can be seen that the kinematic orbit is essentially in agreement with the broadcast ephemerides before and after the maneuver.

Kepler element changes of kinematic (blue) and broadcast orbits (red) for satellite C03 on October 20, 2014
Accelerations induced by thrust forces
If maneuver thrust forces can be estimated accurately, they can be applied in the orbit integration process, and thus, satellite orbits could be calculated continuously even during a maneuver period. Acceleration derived from the differential of changes in velocity can indicate the effect of thrust forces to some extent. Figure 11 shows thrust-induced accelerations of three cases of maneuvers. It indicates that the accelerations (piecewise filtered) increase steadily at the beginning of the maneuver and stay almost constant during the rest of the maneuver period. The in-plane maneuver of C03 on January 5, 2015, has an acceleration of 0.125 mm/s2 in the along-track direction, as plotted on the top left. The accelerations in the along- and cross-track directions of C08 on January 9, 2015, can reach up to 0.70 and 0.15 mm/s2, respectively, shown on the top right. Thrust forces for C03 on October 20, 2014, in the out-of-plane maneuver are much larger and more complex with respect to the executing periods and directions. Accelerations can be as large as 5.4 mm/s2 in the cross-track direction (bottom right), and 0.45 and 0.04 mm/s2 in the along-track and radial directions (bottom left).

Thrust-induced accelerations on maneuvered satellites in RAC directions. Satellite C03 on January 5, 2015 (top left), C08 on January 9, 2015 (top right) and C03 on October 20, 2014 (bottom)
Validation
Accuracies of the maneuver detection results are validated by integrating the estimated thrust forces into the dynamic model for orbit integration and comparing the result with the kinematic orbit. Integrated orbits with thrust forces applied should be consistent with the kinematic ones.
As examples, the estimated accelerations for C03 on January 5, 2015, C08 on January 9, 2015, and C03 on October 20, 2014, are introduced into the orbit integration processes. These calibrated maneuver orbits are then compared with the kinematic ones obtained directly from ground GNSS tracking data. Figure 12 shows their coordinate difference in RAC directions. The periods range from about 10 min before to 10 min after the maneuver. The RMSs of coordinate difference in RAC directions for C03 on January 5, 2015, are 1.41, 0.67 and 0.79 m, and 0.96, 0.82 and 0.66 m for C08 on January 9, 2015. It is clear that for these normal maneuvers, the corrected orbits during the maneuver period have accuracy at decimeter level in the along- and cross-track directions compared to the kinematic orbits. For the exceptional case of the large C03 on October 20, 2014, out-of-plane maneuver, the calibrated orbit has an accuracy of 1.58, 1.03 and 2.38 m in RAC directions. Thus, continuous orbits of Beidou satellites during the maneuver periods can be obtained by orbit integration through this proposed method to an accuracy of sub-meters or 1–2 m.

Differences between corrected and kinematic orbits in RAC directions. Satellite C03 on January 5, 2015 (top), C08 on January 9, 2015 (middle) and C03 on October 20, 2014 (bottom)
Conclusions
Although the maneuver periods are only around 20 min for most Beidou satellites, the interruption of service is more than 6 h. Moreover, the accuracy of broadcast ephemeris available immediately after a maneuver is significantly lower than in normal situations, and there is no precise ephemeris for the satellite on the day of maneuver. If the thrust forces on the satellite during the maneuver period can be estimated precisely, the interruption period for satellite navigation service could be significantly reduced, since tracking data before the maneuver can be used for orbit determination. We proposed a new algorithm to estimate the thrust forces acting on maneuver satellites using a ground tracking network. Both precise maneuver periods and thrust forces are estimated using carrier-phase measurements.
In this study, Beidou observations of IGS MGEX network from April 2014 to March 2015 are used for the analysis. It can be concluded that:
-
1.
Compared to other navigation satellites, e.g., MEO, the Beidou GEO and IGSO satellites are frequently maneuvered, typically about 9–15 maneuvers per year for GEO satellites and 2 maneuvers per year for IGSO satellites.
-
2.
Both in-plane and out-of-plane maneuvers can be carried out for Beidou satellites. All maneuvers of IGSO satellites are out-of-plane, lasting 11–22 min; most GEO satellite maneuvers are in-plane, lasting 20–25 min. However, the extreme cases of GEO out-of-plane maneuver can last about 2 h.
-
3.
Precise velocity changes during maneuver periods have been estimated using carrier-phase measurements from a ground tracking network. For IGSO satellites, 0.4–0.6 m/s along-track and 0.1–0.5 m/s cross-track changes in velocity are applied; for GEO satellites, the velocity changes slightly over 0.1 m/s in the along-track direction due to general in-plane maneuvers. In the extreme case of C03 out-of-plane maneuver, a 28 m/s cross-track velocity change is applied.
-
4.
Accelerations induced by thrust forces during Beidou satellite maneuvers are normally in the range of 0.1–0.7 mm/s2, which can be applied in either along- or cross-track directions. In the extreme cases, the thrust force acting on a GEO satellite can reach 5.4 mm/s2, which is ten times more than the average forces in normal maneuvers.
-
5.
To verify the thrust force estimation accuracy, we applied the estimated forces into the satellite orbit integration process. The integrated orbits are at decimeter level in along- and cross-track directions, compared with kinematic orbits obtained from ground tracking stations. Even for the extreme case, where 2-h maneuver was carried out, the integrated orbit can still reach 1–2 m in all RAC directions.
We have demonstrated that the thrust forces and maneuver periods of Beidou satellites can be precisely estimated by a GNSS ground tracking network. In our future work, the estimated thrust forces will be applied to the Beidou orbit determination program. This would obtain precise Beidou orbit during the maneuver periods and reduce service interruption time due to maneuvers.
References
BeiDou ICD (2013) BeiDou navigation satellite system signal in space interface control document open service signal (version 2.0). http://en.beidou.gov.cn/beidoupolicy.html
Beutler G, Brockmann E, Gurtner W, Hugentobler U, Mervart L, Rothacher M, Verdun A (1994) Extended orbit modeling techniques at the CODE processing center of the international GPS service for geodynamics (IGS): theory and initial results. Manuscr Geod 19(6):367–386
Dach R, Brockmann E, Schaer S, Beutler G, Meindl M, Prange L, Bock H, Jäggi A, Ostini L (2009) GNSS processing at CODE: status report. J Geodesy 83(3–4):353–365. https://doi.org/10.1007/s00190-008-0281-2
Du L, Zhang Z, Zhang J, Liu L, Guo R, He F (2014) An 18-element GEO broadcast ephemeris based on non-singular elements. GPS Solut 19(1):49–59. https://doi.org/10.1007/s10291-014-0364-x
Gienger G, Pereira FL (2012) Towards Automated Determination of Orbit Maneuvers for GNSS Satellites. In: Conference on dynamics and control of space systems, Porto, Portugal, March. pp 131–150
Hugentobler U (1998) Astrometry and satellite orbits: theoretical considerations and typical applications, (Schweizerische Geodätische Kommission, Zürich 1998), Geodätisch-geophysikalische Arbeiten in der Schweiz
Hugentobler U, Ploner M, Schildnecht T, Beutler G (1999) Determination of resonant geopotential terms using optical observations of geostationary satellites. Adv Space Res 23(4):767–770
Jäggi A, Montenbruck O, Moon Y, Wermuth M, König R, Michalak G, Bock H, Bodenmann D (2012) Inter-agency comparison of TanDEM-X baseline solutions. Adv Space Res 50(2):260–271. https://doi.org/10.1016/j.asr.2012.03.027
Ju B, Gu D, Herring TA, Allende-Alba G, Montenbruck O, Wang Z (2017) Precise orbit and baseline determination for maneuvering low earth orbiters. GPS Solut 21(1):53–64. https://doi.org/10.1007/s10291-015-0505-x
Kelecy T, Hall D, Hamada K, Stocker MD (2007) Satellite maneuver detection using two-line element (TLE) data. In: Proceedings of the advanced Maui optical and space surveillance technologies conference, Maui, Hawaii, 12–15 Sept, pp 166–181
Lou Y, Liu Y, Shi C, Wang B, Yao X, Zheng F (2016) Precise orbit determination of BeiDou constellation: method comparison. GPS Solut 20(2):259–268. https://doi.org/10.1007/s10291-014-0436-y
Patera RP (2008) Space event detection method. J Spacecr Rockets 45(3):554–559. https://doi.org/10.2514/1.30348
Prange L, Orliac E, Dach R, Arnold D, Beutler G, Schaer S, Jäggi A (2016) CODE’s five-system orbit and clock solution—the challenges of multi-GNSS data analysis. J Geodesy 91(4):345–360. https://doi.org/10.1007/s00190-016-0968-8
Sehnal L (1960) The perturbations of the orbit of the stationary satellite of the Earth. Bull Astron Inst Czechoslov 11:132
Song WD, Wang RL, Wang J (2012) A simple and valid analysis method for orbit anomaly detection. Adv Space Res 49(2):386–391. https://doi.org/10.1016/j.asr.2011.10.007
Steigenberger P, Hugentobler U, Hauschild A, Montenbruck O (2013) Orbit and clock analysis of Compass GEO and IGSO satellites. J Geodesy 87(6):515–525. https://doi.org/10.1007/s00190-013-0625-4
Xie J, Wang J, Mi H (2012) Analysis of Beidou navigation satellites in-orbit state. In: Sun J, Liu J, Yang Y, Fan S (eds) Proceedings of China satellite navigation conference (CSNC) 2012. Springer, Berlin, pp 111–122. https://doi.org/10.1007/978-3-642-29193-7_10
Yoon Y, Montenbruck O, Kirschner M (2006) Precise maneuver calibration for remote sensing satellites. In: Proceedings of the 19th international symposium on space flight dynamics, Kanazawa, June 4–11, pp 607–612
Zhang J, Qiu H, Yang Y, Guo W (2013) Application of thrust force model in GEO’s orbit determination in case of Maneuvers. In: Sun J, Jiao W, Wu H, Shi C (eds) Proceedings of China satellite navigation conference (CSNC) 2013. Springer, Berlin, pp 55–66. https://doi.org/10.1007/978-3-642-37407-4_5
Zhao QL, Guo J, Li M, Qu LZ, Hu ZG, Shi C, Liu JN (2013) Initial results of precise orbit and clock determination for COMPASS navigation satellite system. J Geodesy 87(5):475–486. https://doi.org/10.1007/s00190-013-0622-7
Acknowledgements
The work was substantially supported by Grants from The Hong Kong RGC Joint Research Scheme (E-PolyU501/16).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Qiao, J., Chen, W. Beidou satellite maneuver thrust force estimation for precise orbit determination. GPS Solut 22, 42 (2018). https://doi.org/10.1007/s10291-018-0705-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-018-0705-2