
Abstract
The main challenge of ambiguity resolution in precise point positioning (PPP) is that it requires 30 min or more to succeed in the first fixing of ambiguities. With the full operation of the BeiDou (BDS) satellite system in East Asia, it is worthwhile to investigate the performance of GPS + BDS PPP ambiguity resolution, especially the improvements of the initial fixing time and ambiguity-fixing rate compared to GPS-only solutions. We estimated the wide- and narrow-lane fractional-cycle biases (FCBs) for BDS with a regional network, and PPP ambiguity resolution was carried out at each station to assess the contribution of BDS. The across-satellite single-difference (ASSD) GPS + BDS combined ambiguity-fixed PPP model was used, in which the ASSD is applied within each system. We used a two-day data set from 48 stations. For kinematic PPP, the percentage of fixing within 10 min for GPS only (Model A) is 17.6 %, when adding IGSO and MEO of BDS (Model B), the percentage improves significantly to 42.8 %, whereas it is only 23.2 % if GEO is added (Model C) due to the low precision of GEO orbits. For static PPP, the fixing percentage is 32.9, 53.3 and 28.0 % for Model A, B and C, respectively. In order to overcome the limitation of the poor precision of GEO satellites, we also used a small network of 10 stations to analyze the contribution of GEO satellites to kinematic PPP. We took advantage of the fact that for stations of a small network the GEO satellites appear at almost the same direction, such that the GEO orbit error can be absorbed by its FCB estimates. The results show that the percentage of fixing improves from 39.5 to 57.7 % by adding GEO satellites.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Carrier-phase ambiguity resolution (AR) is the key for fast and precise GNSS position applications (Teunissen 1995; Teunissen et al. 1997). For relative positioning, double-differenced (DD) carrier-phase ambiguities are normally fixed to integers. However, precise point positioning (PPP) (Zumberge et al. 1997) employs only one receiver, so the fractional-cycle biases (FCBs) of satellite and receiver hardware in the carrier-phase measurements will be absorbed by the undifferenced (UD) ambiguity estimates, destroying their integer properties. In order to fix PPP ambiguity, the FCBs must be separated from the satellite clock products.
Ge et al. (2008) proposed a method, in which the receiver bias was eliminated by across-satellite single-difference (ASSD). The integer property was recovered by sequentially correcting the satellite wide-lane and narrow-lane FCBs. In his method, the estimation of the narrow-lane FCBs was not directly affected by the wide-lane FCB estimates. Laurichesse and Mercier (2007) and Laurichesse et al. (2009) used the wide-lane FCB corrections to fix the UD wide-lane ambiguity and then used the clock estimates to absorb the UD narrow-lane FCBs. Their wide-lane FCB determination differed from that of Ge et al. (2008) in an UD model, and the narrow-lane FCBs were not estimated but assimilated into the clock estimates. Collins et al. (2008) adopted a similar method, known as the decoupled clock model. In his method, the UD narrow-lane ambiguities were fixed to integers before estimating the satellite clocks, so the code clocks were different from the carrier-phase ones. Once the carrier-phase ambiguities are correctly fixed to the integer values, these three methods will provide similar results. Geng et al. (2010a) and Shi and Gao (2014) compared these methods and proved the theoretical equivalence of them. Teunissen and Khodabandeh (2014) provided also a good description of such methods and did not identify important difference among them.
Although great results have been reported for ambiguity-fixed PPP, it still suffers from a long initial fixing time (IFT) of 30 min or more to succeed in the first ambiguity-fixed solution (Geng et al. 2011). Several methods regarding the fast ambiguity fixing for PPP have been developed, which are briefly discussed below.
Geng et al. (2010b) predicted the ionospheric and tropospheric delays to achieve rapid ambiguity fixing after data gaps, avoiding the problem of reinitialization in the ambiguity-fixed PPP. However, the problem of a long IFT still exists. Li et al. (2011) proposed to derive precise UD atmospheric delays with PPP-fixed solutions for a reference network and then deliver these corrections to users to augment PPP ambiguity resolution. Although instantaneous ambiguity fixing is achieved, a dense regional reference network is required in his method, which is not available in many situations. Li and Zhang (2012) proposed a PPP ambiguity-fixing scheme based on processing L1 and L2 raw observations. The FCBs for the L1 and L2 frequencies were generated, and the L1 and L2 ambiguities were fixed together in the user PPP. Since the slant ionospheric delays were estimated as unknown parameters, empirical, spatial and temporal constraints on the ionospheric delays were considered to strengthen the solution. For kinematic PPP solution, the IFT was shortened by 25 % compared to that of the traditional solution.
Jokinen et al. (2011) studied the IFT improvements by adding GLONASS observations to help GPS PPP ambiguity resolution. The results showed that adding GLONASS can reduce the IFT by approximately 5 % compared to GPS-only solution. Li and Zhang (2014) did the same analysis and found that the average IFT can be shortened by 27.4 % from 21.6 to 15.7 min in static mode and by 42.0 % from 34.4 to 20.0 min in kinematic mode, respectively. However, in both of the previous two studies, only GPS ambiguities are attempted to be fixed to integers and GLONASS ambiguities are kept as float values.
From the above review, we see that all ambiguity-fixed PPP studies are limited to GPS. With the full operation of BeiDou (BDS) regional system, and the availability of the precise clock and orbit products for BDS satellites, it is necessary to investigate the performance of GPS + BDS PPP ambiguity resolution, especially the improvements of IFT and the correct fixing percentage (CFP) for ambiguities compared to GPS-only solutions.
The code observations of BDS are affected by large satellite-induced systematic variations (SISV) of up to 1 m (Hauschild et al. 2012; Perello Gisbert et al. 2012), which, if not calibrated, will completely undermine the wide-lane FCB estimation or the wide-lane ambiguity resolution based on the Hatch–Melbourne–Wübbena combination (HMW) (Hatch 1982; Melbourne 1985; Wübbena 1985). Although Wanninger and Beer (2015) have given a correction model for this systematic variation, the wide-lane FCB estimation of BDS has not been investigated. Based on that correction model, we try to estimate BDS wide-lane FCB and fix wide-lane ambiguity for the first time. An across-satellite single-difference (ASSD) GPS + BDS ambiguity-fixed PPP model is used in this study, in which the ASSD is applied within each satellite system. A reference satellite with the highest elevation is selected for each system. GEO satellites of BDS are not used as reference satellite.
Methods
The method proposed by Ge et al. (2008) is applied in this study. It consists of four sequential steps: the wide- and narrow-lane FCB estimations at the server and the wide- and narrow-lane ambiguity resolution in PPP. For BDS code observations, there exists large elevation-dependent systematic bias, which must be modeled and corrected before FCB estimation.
BDS satellite-induced code bias
The wide-lane ambiguity is resolved in PPP by the HMW combination of dual-frequency code and carrier-phase measurements as:
where i and k represent a receiver and satellite, respectively, λ is the carrier-phase wavelength, L and P are the carrier phase and code measurement in unit of meter. It is seen in (1) that the HMW combination will be affected directly by the SISV, which will fail both the wide-lane FCB estimation and the wide-lane ambiguity resolution.
Based on the multipath combination (Montenbruck et al. 2013), Wanninger and Beer (2015) identified the SISV correction model for two groups of BDS satellites (MEO and IGSO) whose signals are influenced in a similar way. The code bias is found to be independent on receiver type, time of observation and satellite azimuth. They developed an elevation-dependent correction model with a set of globally distributed receivers.
It should be pointed out that the correction model of Wanninger and Beer (2015) is based on a zero mean condition of the estimated correction values. With this somewhat arbitrary absolute level, the estimated FCBs will be biased. So, in the wide-lane FCB estimation and the user PPP ambiguity resolution, the same set of corrections should be used to make the FCB products consistent and thus recover the integer nature of wide-lane ambiguities.
For a specific ground tracking station, the elevation of GEO satellites will be constant, so the SISV correction model cannot be determined with the Wanninger and Beer (2015) method. Moreover, because of this attribute, the SISV will remain constant for each GEO satellite and will be absorbed into the HMW wide-lane ambiguity. In addition, in a small region, the elevation angle for a GEO satellite will be almost the same for each tracking station, so the SISV bias will also be the same for each station. Thus, the SISV bias in the HMW for a specific GEO satellite will be the same for each station and will be absorbed into the wide-lane FCB estimates, which will be consistent for the stations in this small region.
ASSD–FCB estimation
In order to fix ambiguities in PPP, both wide-lane and narrow-lane FCBs must be derived at the server and provided to users together with the corresponding satellite orbit and clock. The reference stations are analyzed in PPP model to generate satellite FCBs.
The float wide-lane ambiguity can be estimated by averaging the HMW combination epoch by epoch. In order to eliminate the receiver-induced bias, ASSD is applied for each station, and the wide-lane ASSD–FCB is calculated by averaging the fractional parts of all related ASSD ambiguities. After fixing the wide-lane ambiguity, the float narrow-lane ambiguity can be obtained from the float ionospheric-free ambiguity by:
where N w and N n are the wide- and narrow-lane ambiguities, respectively, and N c is the ionospheric-free ambiguity. ASSD is applied to the narrow-lane ambiguities for each station; then, the ASSD narrow-lane FCBs can be obtained by averaging the fractional parts of all related ASSD narrow-lane ambiguities.
With a wavelength of about 0.8 m and its insensitivity to the errors of measurements, the wide-lane FCBs are very stable and daily estimates can be determined precisely with a network of reference stations (Gabor and Nerem 1999; Ge et al. 2008). Meanwhile, the narrow-lane FCBs are not as stable as the wide-lane ones because of their short wavelength of about 0.1 m and sensitivity to unmodeled errors (Ge et al. 2008). So we estimate them every 5 min to ensure enough accuracy. Gross error detection is adopted in FCB estimation by rejecting fractional parts with a residual over a threshold of ±0.3 cycles.
Because of the inter-system hardware and time bias, the ASSD should be performed within each system. We select individual reference satellite with the highest elevation for GPS and BDS, respectively. For BDS, the GEO satellites should not be used as reference satellite because of their relatively low orbit precision.
ASSD PPP ambiguity resolution
At the user, ASSD is also applied with the same strategy as the reference stations. After fixing the wide-lane ambiguity, the float narrow-lane ambiguity estimates and its variance–covariance can be derived with (2). The integer nature can be retrieved by applying the narrow-lane FCB correction. Due to the strong correlation between the short-term PPP ambiguities, a search strategy based on the LAMBDA method is applied to conduct the narrow-lane ambiguity resolution (Teunissen 1994). The ratio test is used to validate the ambiguity resolution with a threshold of 3, which is generally deemed as conservative in ambiguity validation (Han 1997). The ratio test is generally defined as the ratio of the second minimum of the quadratic form of the residuals to the minimum and can be considered as an index to denote reliability of ambiguity resolution. Thus, larger ratio values denote a more reliable ambiguity resolution.
Data and processing strategy
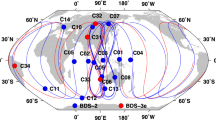
Observations from two networks were analyzed in order to assess the influence of adding BDS data to the GPS-only solution. The first network consists of 48 stations, all of which use Trimble NetR9 receivers with the same firmware version of “Nav 4.81/Boot 4.29” and with the same antenna type of “TRM59900.00 NONE”; their distribution is shown in Fig. 1 (top). These stations were used to generate the wide-lane and narrow-lane FCBs and to analyze the spatial and temporal behavior of them. Then, PPP ambiguity resolution was conducted for all of these stations to analyze the performance of the combined GPS + BDS and GPS-only PPP ambiguity resolution. To overcome the limitation of the poor precision of GEO satellites, a small network within the 48 stations, denoted with blue solid dots, was selected to further assess the contribution of GEO satellites. Because these data are not publically available, we have only 2 days of data, covering DOY 213 and 214, 2013, but the data can still satisfy our research. In order to analyze the long-term stability of the wide-lane FCBs, we used a second network consisting of 5 stations with data of 10 days covering DOY 213–222, 2014. They are also all equipped with Trimble NetR9 receivers, and the distribution is shown on the bottom panel of Fig. 1.

GPS + BDS stations with data for DOY 213 and 214, 2013 (top); GPS + BDS stations with data for DOY 213–222, 2014 (bottom)
The Positioning And Navigation Data Analyst (PANDA) software (Shi et al. 2008), developed at Wuhan University, was modified to process GPS + BDS data. It is a versatile and fundamental platform for scientific studies in China (Liu and Ge 2003; Shi et al. 2008). The final products of the satellite orbit and clock and the differential code biases (DCB) produced by Center for Orbit Determination in Europe (CODE) (Dach et al. 2009) were used for GPS. For BDS, we used the satellite orbit and clock products from IGS Analysis Center of Wuhan University. We applied the absolute phase center correction (Schmid et al. 2007), the phase windup effects (Wu et al. 1993) and the station displacement models proposed by IERS conventions 2003 (McCarthy and Petit 2003). A cutoff angle of 7° was set for both GPS and BDS measurements, and an elevation-dependent weighting strategy was applied to weight measurements at low elevations. To avoid measurements affected by higher noise at lower elevation angles, which will increase the likelihood of incorrect ambiguity fixing, only the UD PPP ambiguities with elevation angles larger than 10° were used to compose ASSD ambiguities which were then fixed.
The unknown parameters included position coordinates, tropospheric zenith wet delay (ZWD) and the ambiguities. We estimated ZWDs every hour with the global mapping function (Boehm et al. 2006). The ambiguity parameters and static position coordinates were considered constant, while the kinematic position coordinates were modeled as white noise. When estimating the FCBs, the station coordinates were estimated with an initial constraint of 0.1 m; there was no such constraint for the user PPP ambiguity resolution. For both GPS and BDS, the initial standard deviation values for raw carrier phase and pseudorange observations were set as 0.01 and 1 m, respectively.
In order to assess the benefits of ambiguity resolution, when using GPS + BDS, we conducted PPP ambiguity resolution for all the 48 stations for DOY 213 and 214 in 2013. The daily observations were divided into 24 pieces of hourly sets; hence, there were generally 48 hourly solutions for each station and 2304 in all if there was no data loss. The strategies adopted for PPP at the user were the same as that of the reference stations. We assumed that the ambiguities can be fixed to the correct integers with daily observations, and then, the hourly ambiguities were compared with the daily “truth” to check its correctness.
Experiment results and discussion
In this section, the quality of the estimated FCBs is first assessed by the consistency of the fractional parts of all ASSD ambiguities corresponding to the same satellite pair. Then, the wide- and narrow-lane FCBs are used to correct the ASSD ambiguities in the reference stations, to check the fixing efficiency. At last, hourly PPP ambiguity resolution is conducted.
Validation of FCB estimates
As an example, Fig. 2 shows the estimated wide-lane FCBs of GPS and BDS on day 213, 2013. The red diamonds show the estimated FCBs of all satellites. The GPS FCBs are referenced to G32, and those of BDS are referenced to C07, because these two satellites were in “healthy” condition and had good ground tracks for all days. Clearly, the FCBs are significantly nonzero for either GPS or BDS and must be corrected to retrieve the integer nature of wide-lane ambiguities. The blue solid dots represent the number of used ASSD ambiguities, and the error bars show the STDs of the fractional parts of the ASSD ambiguities, which can be used as an indicator for the quality of the FCBs. For GPS, the STDs range from 0.02 to 0.05 cycles and are on average 0.03. For IGSO and MEO satellites of BDS, the STDs are comparable with those of GPS, with an average of 0.03 cycles. This confirms that the estimated FCBs have sufficient precision for wide-lane ambiguities fixing. However, the STDs for GEO satellites are larger, with a min STD of 0.05 cycles, a max of 0.1 and an average of 0.07 over all satellites.

Estimated wide-lane ASSD–FCBs for all GPS and BDS satellites with respect to G32 and C07 for DOY 213, 2013
In order to further validate the wide-lane FCB estimates, we used the FCBs to correct the ASSD ambiguities of the reference stations and checked the fixing efficiency, which is shown in Fig. 3. For GPS satellites, with the fixing criteria of 0.15 cycles, 96.4 % of all wide-lane ambiguities can be fixed. The fixing percentage for IGSO and MEO is 89.8 and 98.1 %, respectively, which is comparable with that of GPS. Nevertheless, GEO has the lowest fixing percentage of only 69.1 %. Under the criteria of 0.25 cycles, the fixing percentages are all over 95.9 % for GPS, IGSO and MEO satellites, while only 87.5 % for GEO.

Fixing percentage of GPS and BDS daily wide-lane float ambiguities
Figure 4 shows the distribution of the stations, which have different fixing percentage for GEO wide-lane ambiguities under the criteria of 0.25 cycles. It is seen that the stations corresponding to different fixing percentage are evenly distributed in the network. So we consider the low fixing percentage of GEO ambiguities as being caused by site-specific errors such as multipath errors. Wang et al. (2015) have found large multipath errors for GEO, which can also account for this phenomenon.

Geographical distribution of stations with different GEO wide-lane ambiguity-fixing percentage under the criteria of 0.25 cycles
Figure 5 gives a typical example of wide-lane FCBs for satellite G16, C03, C06 and C12 on DOY 213–222 in 2014. It is seen that the estimates of the wide-lane FCBs are rather stable, and the values of different days agree with each other better than 0.06 cycles. Therefore, wide-lane FCBs for GPS and BDS can be predicted with an update time interval of more than one day.

Stability of the daily wide-lane ASSD–FCBs for satellites G16, C03, C06 and C12 with respect to G32 and C07 for GPS and BDS, respectively
Taking the 281th 5-min narrow-lane FCB estimates on DOY 213, 2013 as an example, Fig. 6 shows the STDs for all narrow-lane FCB estimates with respect to satellite G31 and C10 for GPS and BDS, respectively. It is seen that the FCB precisions are comparable for GPS, IGSO and MEO satellites, and that the STDs are all less than 0.06 cycles when the satellite elevation is larger than 20°. However, the GEO satellites show large STDs: For C02 and C03, even though the satellite elevation is over 40°, the STD is as large as 0.09 and 0.16 cycles, respectively. The STD of C05 is 0.14 cycles, which is 3.5 times as that of C06 whose elevation is even lower than C05. In addition, the STDs of these three GEO satellites remain that large throughout the whole day.

Narrow-lane FCB estimates of the 281th 5-min epoch
The narrow-lane FCBs are also applied to the reference stations to check the fixing efficiency, which is shown in Fig. 7. Under the criteria of 0.15 cycles, over 90 % of all the ambiguities can be fixed for GPS and IGSO satellites and 85 % for MEO satellites. While under the criteria of 0.25 cycles, the fixing percentages are all over 90 % for GPS, IGSO and MEO. Nevertheless, GEO shows the lowest fixing percentage, i.e., only 56 % can be fixed under 0.15 cycles and 71 % under 0.25.

Fixing percentage of GPS and BDS narrow-lane float ambiguities
In order to further analyze the reason for the low fixing percentage of GEO, Fig. 8 shows the distribution of the stations with different fixing percentage for GEO narrow-lane ambiguities under the criteria of 0.15 cycles. It is seen that all the stations with a fixing percentage of over 60 % are located at the center of the network. Thus, we consider the low fixing percentage of GEO satellites to be caused by the low precision of the orbits, which cannot be absorbed by satellite clocks or narrow-lane FCBs, resulting in narrow-lane FCB estimates incompatible with the stations on the edge of the network.

Geographical distribution of stations with different narrow-lane ambiguity-fixing percentage for GEO narrow-lane ambiguities under the criteria of 0.15 cycles
Hourly PPP ambiguity-fixing results
With the wide- and narrow-lane FCBs being available, PPP ambiguity resolution can be performed. Since the precision of the narrow-lane FCBs of GEO is very poor, the ambiguity-fixed PPP performance is analyzed based on three different models, namely GPS-only PPP (Model A), combined GPS + BDS without GEO PPP (Model B) and combined GPS + BDS with GEO PPP (Model C).
The large network
The ambiguity-fixed PPP solution is applied to all hourly observations for each of the 48 stations in both kinematic mode and static mode. The IFT of each hourly solution is recorded and analyzed. Figure 9 shows the distribution of the IFT for kinematic PPP in all hourly solutions. For Model A, the fixing percentage within 1 h is only 78.1 %, while for Model B the fixing percentage is improved significantly to 96.2 %, whereas for Model C the fixing percentage is reduced to 60.4 %. We calculated the fixing percentage for different observation length, as shown in Table 1. Within 10 min, the fixing percentage for Model A is only 17.6 %, for Model B it improves significantly to 42.8 % and drops to 23.2 % for Model C. For observation length of 20 min and 30 min, the fixing percentage is 39.3 and 57.0 %, respectively, for Model A, 74.0 and 86.1 % for Model B and 37.5 and 46.1 % for Model C. The reduction in percentage for Model C is caused by the low precision of GEO FCB products.

Distribution of the IFT for Model A, B and C in kinematic PPP
Although ratio test is very popular in ambiguity validation, the question is how to choose the critical value. Based on empirical results, different critical values have been proposed in literature (Han and Rizos 1996a, b; Wei and Schwarz 1995; Leick et al. 2015). The most popularly used value is 3. A higher critical value means a more confident result at the costs of unnecessary rejections. We denote the percentage of the epochs where a correct ambiguity is accepted as correct fixing rate (CFR) and analyzed the CFR for different critical values for Model A and B. The result is shown in Fig. 10. For a critical value of 3, the CFR is only 73.1 % for Model A, while it is as large as 93.0 % for Model B. The CFR arises when the critical value increases. For a critical value of 6, the CFR is only 85.2 % for Model A, but 96.6 % for Model B. This confirms that, by adding BDS, a stronger model can be obtained and the CFR improves significantly. Since there is no significant difference between the CFRs with different critical value for Model B, we propose to use 3 as the ratio test critical value for Model B.

Correctly fixing rate using different ratio values for Model A and B in kinematic PPP
The statistical results for the IFT of static PPP are shown in Fig. 11 and Table 2. Compared with the kinematic PPP, for Model A, the IFT is concentrated within 30 min; the fixing percentage within 10 min, 20 min, 30 min and 1 h improves significantly as 32.9, 69.9, 84.2 and 95.2 %, respectively. However, all these percentage values are smaller than the corresponding ones for Model B in kinematic PPP. Compared with Model A, the improvement of static PPP to kinematic PPP in the fixing percentage is very little for Model B. This is because the model strength is well enough by adding BDS, and using static PPP does not contribute much to the model strength. Because of the low precision of GEO FCB products, the fixing percentage for Model C improves very little when using static model.

Distribution of the IFT for Model A, B and C in static PPP
We also analyzed the CFR with different critical value in static PPP, and the result is shown in Fig. 12. Compared with kinematic PPP, for Model A, the CFR with critical value 3 is improved significantly to 83.4 %, while it is 92.3 % for 6. However, all these CFR values are smaller than the corresponding ones of Model B in kinematic PPP.

Correctly fixing rate using different ratio values for Model A and B in static PPP
When comparing with kinematic PPP, the improvement of the CFR under each critical value is very little by using static PPP, less than 1 % for Model B. This is the case because adding BDS has increased the model strength sufficiently so that very little is added by constraining the position parameters between epochs.
Small network
In order to overcome the limitation of the poor precision of GEO satellites and analyze the contribution of GEO to PPP ambiguity resolution, we used the small network (denoted with blue solid dots on the top panel of Fig. 1) to estimate FCBs and then conducted ambiguity-fixed PPP for each station within it. Since this network is small, the errors in the GEO satellite orbit can be absorbed into the narrow-lane FCB estimates. The FCB was first applied back to the stations in this network to check the fixing efficiency; the result is shown in Fig. 13. The fixing percentages for the wide-lane ambiguity of four types of satellites are comparable with those in the large network (Fig. 3). While for the narrow-lane, the fixing percentage of GEO is improved significantly to 96 % under the criteria of 0.15 cycles, which is comparable with that of GPS, IGSO and MEO. So, it is further confirmed that the low precision of GEO narrow-lane FCBs in the larger network is due to the low precision of GEO orbits.

Fixing percentage of GPS and BDS daily wide- and narrow-lane float ambiguities
With the new FCBs, we conducted ambiguity-fixed kinematic PPP with Model B and Model C for each station in the small network. Figure 14 shows the distribution of the IFT. In contrast to Fig. 9, the distribution of IFT for Model B is comparable with that of the large network, while significant improvement is achieved for Model C whose IFT is mostly within 20 min. It is noted that, however, the fixing percentage within 1 h is slightly degraded from 96.5 to 95.3 %, which may be caused by the low quality of GEO observations.

Distribution of the IFT for Model B and C in kinematic PPP
Table 3 gives the fixing percentage for different observation time length. It is seen that when adding GEO satellites, the fixing percentage within 10 min improves significantly from 39.5 to 57.7 %, and the fixing percentage within 20 and 30 min improves from 73.8 and 86.9 % to 81.4 and 90.7 %, respectively. It is confirmed that adding GEO can contribute significantly to shortening the IFT. It also confirms that the low fixing percentage in the large network when adding GEO (Model C in Fig. 8) is caused by the low precision in the FCBs.
Conclusions
This study presents recent progress achieved in GPS + BDS PPP ambiguity resolution. It is demonstrated that the wide- and narrow-lane FCBs of BDS IGSO and MEO satellites can be determined accurately with a regional network, and the same precision as GPS can be achieved. However, the wide-lane FCBs for GEO satellites have low precision compared with other satellite types, which may be caused by station multipath. Moreover, as a result of the low precision of BDS GEO orbits, their narrow-lane FCBs cannot be determined precisely with a large network.
The contribution of BDS observations to the IFT of PPP has been investigated. Numerical results show that, for kinematic PPP, the fixing percentage within 10 min for GPS only (Model A) is 17.6 %. When adding IGSO and MEO of BDS (Model B), the percentage improves significantly to 42.8 %. However, when adding GEO, IGSO and MEO of BDS (Model C), the fixing percentage is only 23.2 %, which is because of the low precision in the GEO FCB products within a large network. For static PPP, the fixing percentage is 32.9, 53.3 and 28.0 % for Model A, B and C, respectively. We also used a small network of 10 stations to analyze the contribution of GEO satellites to kinematic PPP. The results show that the fixing percentage within 10 min for kinematic PPP improves from 39.5 to 57.7 % by adding GEO satellites. Thus, it is demonstrated that adding GEO satellites can also contribute significantly to the shortening of the IFT.
We have also analyzed the CFR of the ratio tests with different critical values. For kinematic positioning, with the critical value of 3, the CFR is only 73.1 % for Model A, whereas the percentage is as large as 93.0 % for Model B. Moreover, there is no significant improvement in the CFR of Model B when increasing the critical values; therefore, we propose to use 3 as the critical value for the ratio test.
The presented work has demonstrated that with GPS + BDS the IFT of PPP can be shortened significantly and the CFR is also improved significantly. With the future improvements in BDS satellite orbit precision, reliable PPP ambiguity resolution on a wide area over East Asia will be feasible, which could be employed in real-time PPP processing services.
References
Boehm J, Niell A, Tregoning P, Schuh H (2006) Global mapping function (GMF): a new empirical mapping function based on numerical weather model data. Geophys Res Lett 33:L7304. doi:10.1029/2005GL025546
Collins P, Lahaye F, Hérous P, Bisnath S (2008) Precise point positioning with AR using the decoupled clock model. In Proceedings of ION GNSS 2008. Institute of Navigation, Savannah, GA, 16–19 September, pp 1315–1322
Dach R, Brockmann E, Schaer S et al (2009) GNSS processing at CODE: status report. J Geod 83(3–4):353–365
Gabor MJ, Nerem RS (1999) GPS carrier phase AR using satellite–satellite single difference. In Proceedings of ION GPS 1999, Institute of Navigation, Nashville, TN, USA, 14–17 September, pp 1569–1578
Ge M, Gendt G, Rothacher M, Shi C, Liu J (2008) Resolution of GPS carrier phase ambiguities in precise point positioning (PPP) with daily observations. J Geod 82(7):389–399
Geng J, Meng X, Dodson A, Teferle F (2010a) Integer ambiguity resolution in precise point positioning: method comparison. J Geod 84(9):569–581
Geng J, Meng X, Dodson AH, Ge MR, Teferle FN (2010b) Rapid reconvergence to ambiguity-fixed solutions in precise point positioning. J Geod 84(12):705–714
Geng J, Teferle FN, Meng X, Dodson AH (2011) Towards PPP-RTK: ambiguity resolution in real-time precise point positioning. Adv Space Res 47(10):1664–1673
Han S (1997) Quality-control issues relating to instantaneous ambiguity resolution for real-time GPS kinematic positioning. J Geod 71(6):351–361
Han S, Rizos C (1996a) Validation and rejection criteria for integer least-squares estimation. Surv Rev 33(260):375–382
Han S, Rizos C (1996b) Integrated methods for instantaneous ambiguity resolution using new-generation GPS receivers. In: Proceedings of the IEEE PLANS’96, Atlanta GA, pp 245–261
Hatch R (1982) The synergism of GPS code and carrier measurements. In: Proceedings of the third international symposium on satellite Doppler positioning at Physical Sciences Laboratory of New Mexico State University, Feb 8–12, vol 2, pp 1213–1231
Hauschild A, Montenbruck O, Sleewaegen JM, Huisman L, Teunissen P (2012) Characterization of compass M-1 signals. GPS Solut 16(1):117–126
Jokinen A, Feng S, Milner C, Schuster W, Ochieng W (2011) Precise point positioning and integrity monitoring with GPS and GLONASS. In: European navigation conference 2011
Laurichesse D, Mercier F (2007) Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP. Navigation 56(2):135–149
Laurichesse D, Mercier F, Berthias JP, Broca P, Cerri L (2009) Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination. Navigation 56(2):135–149
Leick A, Rapoport L, Tatarnikov D (2015) GPS satellite surveying, 4th edn. Wiley, Hoboken
Li X, Zhang X (2012) Improving the estimation of uncalibrated fractional phase offsets for PPP ambiguity resolution. Navigation 65(3):513–529
Li P, Zhang X (2014) Integrating GPS and GLONASS to accelerate convergence and initialization times of precise point positioning. GPS Solut 18(3):461–471
Li X, Zhang X, Ge M (2011) Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. J Geod 85(3):151–158
Liu J, Ge M (2003) PANDA Software and its preliminary result of positioning and orbit determination. Wuhan Univ J Nat Sci 8(2B):603–609
McCarthy DD, Petit G (2003) IERS Conventions (2003). IERS Technical Note No. 32, Bundesamt fuer Kartographie und Geodaesie, Frankfurt
Melbourne WG (1985) The case for ranging in GPS-based geodetic systems. In: Proceedings of the first international symposium on precise positioning with the global positioning system, Rockville, MD, USA, 15–19 April
Montenbruck O, Hauschild A, Steigenberger P, Hugentobler U, Teunissen P, Nakamura S (2013) Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut 17(2):211–222
Perello Gisbert JV, Batzilis N, Risueño GL, Rubio JA (2012) GNSS payload and signal characterization using a 3 m dish antenna. In: Proceedings of ION GNSS 2012, Institute of Navigation, Nashville, TN, 17–21 September, pp 347–356
Schmid R, Steigenberger P, Gendt G et al (2007) Generation of a consistent absolute phase-center correction model for GPS receiver and satellite antennas. J Geod 81(12):781–798
Shi J, Gao Y (2014) A comparison of three PPP integer ambiguity resolution methods. GPS Solut 18(4):519–528
Shi C, Zhao Q, Geng J, Lou Y, Ge M, Liu J (2008) Recent development of PANDA software in GNSS data processing. In: Proceedings of the Society of Photographic Instrumentation Engineers, 7285, 72851S. doi:10.1117/12.816261
Teunissen PJG (1994) A new method for fast carrier phase ambiguity estimation. In: Proceedings of IEEE position, location and navigation symposium, Las Vegas, US, pp 562–573
Teunissen PJG (1995) The least-squares ambiguity decorrelation adjustment: a method for fast GPS integer ambiguity estimation. J Geod 70(1–2):65–82
Teunissen PJG, Khodabandeh A (2014) Review and principles of PPP–RTK methods. J Geod 89(3):217–240
Teunissen PJG, de Jonge PJ, Tiberius CCJM (1997) The least-squares ambiguity decorrelation adjustment: its performance on short GPS baselines and short observation spans. J Geod 71(10):589–602
Wang G, de Jong K, Zhao Q, Hu Z, Guo J (2015) Multipath analysis of code measurements for BeiDou geostationary satellites. GPS Solut 19(1):129–139
Wanninger L, Beer S (2015) BeiDou satellite-induced code pseudorange variations: diagnosis and therapy. GPS Solutions 19(4):639–648
Wei M, Schwarz KP (1995) Fast ambiguity resolution using an integer nonlinear programming method. In: Proceedings of ION GPS 1995, Institute of Navigation, Palm Springs CA, 12–15 September, pp 1101–1110
Wu JT, Wu SC, Hajj GA, Bertiger WI, Lichten SM (1993) Effects of antenna orientation on GPS carrier phase. Manuscr Geod 18:91–98
Wübbena G (1985) Software developments for geodetic positioning with GPS using TI-4100 code and carrier measurements. In: Proceedings of the first international symposium on precise positioning with the global positioning system, Rockville, MD, April
Zumberge JF, Heflin MB, Jefferson DC, Watkins MM, Webb FH (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res 102(B3):5005–5017
Acknowledgments
We are grateful to the reviewers and the editor for their helpful and constructive suggestions to significantly improve the quality of the paper. This work is partially supported by National Natural Science Foundation of China (Nos. 41231174, 41074008, 41404010, 41374034), National 973 Program of China (No. 2012CB957701), Research Fund for the Doctoral Program of Higher Education of China (No. 20120141110025), Non-profit Industry Financial Program of MWR (No. 201401072).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Liu, Y., Ye, S., Song, W. et al. Integrating GPS and BDS to shorten the initialization time for ambiguity-fixed PPP. GPS Solut 21, 333–343 (2017). https://doi.org/10.1007/s10291-016-0525-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-016-0525-1