
Abstract
The revitalized Russian GLONASS system provides new potential for real-time retrieval of zenith tropospheric delays (ZTD) and precipitable water vapor (PWV) in order to support time-critical meteorological applications such as nowcasting or severe weather event monitoring. In this study, we develop a method of real-time ZTD/PWV retrieval based on GLONASS and/or GPS observations. The performance of ZTD and PWV derived from GLONASS data using real-time precise point positioning (PPP) technique is carefully investigated and evaluated. The potential of combining GLONASS and GPS data for ZTD/PWV retrieving is assessed as well. The GLONASS and GPS observations of about half a year for 80 globally distributed stations from the IGS (International GNSS Service) network are processed. The results show that the real-time GLONASS ZTD series agree quite well with the GPS ZTD series in general: the RMS of ZTD differences is about 8 mm (about 1.2 mm in PWV). Furthermore, for an inter-technique validation, the real-time ZTD estimated from GLONASS-only, GPS-only, and the GPS/GLONASS combined solutions are compared with those derived from very long baseline interferometry (VLBI) at colocated GNSS/VLBI stations. The comparison shows that GLONASS can contribute to real-time meteorological applications, with almost the same accuracy as GPS. More accurate and reliable water vapor values, about 1.5–2.3 mm in PWV, can be achieved when GLONASS observations are combined with the GPS ones in the real-time PPP data processing. The comparison with radiosonde data further confirms the performance of GLONASS-derived real-time PWV and the benefit of adding GLONASS to stand-alone GPS processing.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The potential of GPS observations for troposphere monitoring was first described in Bevis et al. (1992) concerning postprocessing solutions. The near-real-time (NRT) tropospheric solutions, which are suitable for numerical weather prediction (NWP) models, were then developed and evaluated by extensive investigations (Rocken et al. 1997; Gendt et al. 2004; Elgered et al. 2005). Several projects such as wavefront, magic, and European Cooperation in Science and Technology (COST-716) have demonstrated the ability of GPS serving as an accurate water vapor sensor for meteorological and climatological applications (Haan et al. 2004; Gutman et al. 2004; Nilsson and Elgered 2008). As a notable example, within the European E-GVAP (http://egvap.dmi.dk) project, a ground tracking network consisting of more than 2400 continuously operating GPS stations is deployed to provide NRT PWV (precipitable water vapor) estimates for assimilation into NWP models.
To fully exploit the potential of GNSS (Global Navigation Satellite Systems) for real-time monitoring and forecasting of severe weather events, the development and transition from the NRT mode to the true real-time mode of tropospheric monitoring has become one of the current topics, such as for the new European COST Action ES1206 (http://www.cost.eu/COST_Actions/essem/Actions/ES1206). During recent years, the International GNSS Service (IGS) has coordinated the development of global real-time orbit and clock products, exploiting individual contributions from several institutions in order to guarantee its high robustness and availability (Li et al. 2013a, b). At the end of 2012, the IGS launched its real-time service (RTS) and declared the product as official (Caissy et al. 2012). Thanks to these developments, precise point positioning (PPP, Zumberge et al. 1997) has been successfully applied for real-time water vapor retrieving and for supporting time-critical meteorological applications, such as NWP, nowcasting or severe weather event monitoring (Li et al. 2014; Dousa and Vaclavovic 2014; Yuan et al. 2014; Shi et al. 2015).
The Russian GLObal NAvigation Satellite System (GLONASS) has been revitalized and is now fully operational with 24 satellites in orbit (http://www.glonass-ianc.rsa.ru/en/GLONASS/). It has been going through gradual modernization and the FDMA (Frequency Division Multiple Access) mode is scheduled to change to CDMA (Code Division Multiple Access) mode, which is consistent with other GNSS systems concerning the convenience for integer ambiguity resolution (Cai and Gao 2013; Li et al. 2015a). At present, more than 200 stations operated by IGS can continuously provide both GPS and GLONASS observations. Consequently, several investigations focusing on adding GLONASS satellites to GPS for precise positioning have been carried out, and results demonstrate that the combined GPS/GLONASS PPP solution is more accurate and more robust than the GPS-only solution in terms of positioning, with significantly reduced time for position convergence (Cai and Gao 2013; Li et al. 2015b).
However, so far only limited studies related to using GLONASS data only or in combination with GPS data for tropospheric parameter estimation have been conducted. Bruyninx (2007) pointed out an underestimation of about 0–2 mm in ZTD (zenith total delays) estimates from the combined GPS and GLONASS PPP solution compared to the GPS-only solution. A systematic bias between the ZTD derived from GPS and GLONASS in NRT solution was identified by Dousa (2010), with the GLONASS ZTD resulting in approximately 1–3 mm lower values compared to those estimated from GPS using a network of 38 European stations. Furthermore, no significant improvement in the ZTD quality was found when comparing a stand-alone GPS solution with respect to the combined GPS/GLONASS solution in NRT processing. However, the initial inconsistency between stand-alone GPS and GLONASS ZTD solutions disappeared when the IGS08 antenna phase center models were adopted (Dach et al. 2011).
With the completion of GLONASS, the quality of ZTD/PWV retrieved from GLONASS data is expected to improve and increase the benefit of combining GLONASS and GPS for ZTD/PWV estimation, especially in real-time processing (Li et al. 2015a). We investigate the real-time ZTD/PWV retrieval from stand-alone GLONASS, GPS, and GLONASS + GPS observations based on the PPP technique. The observations of 80 globally distributed stations from the IGS network are processed in real-time PPP mode to derive three different solutions: GLONASS-only, GPS-only, and GPS/GLONASS combined solution. First, the performance of the GLONASS-derived ZTD is assessed by comparing to those derived from GPS. All the three solutions are then compared to results derived from very long baseline interferometry (VLBI) and radiosondes (RS) to independently evaluate the performance of the GLONASS-only solution and the benefit of adding GLONASS to GPS for ZTD/PWV retrieval.
GNSS data collection and processing
The collection of data sets of GLONASS and GPS is described in this part. The observation modeling and processing strategies for real-time GNSS ZTD/PWV retrieval are also presented in detail.
GNSS data collection
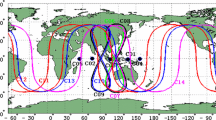
The IGS collects, archives, and freely distributes GNSS observation data sets from a cooperatively operated global network of several hundreds of ground tracking stations. Apart from supporting tracking of GPS, the majority of its stations are capable of providing GLONASS observations (Dow et al. 2009) as well. In this study, the GPS and GLONASS observations of about 80 stations from the IGS network are processed in simulated real-time mode. The distribution of the selected IGS stations that can track both GPS and GLONASS satellites is shown in Fig. 1.

Distribution of the selected GPS/GLONASS IGS stations
Real-time ZTD/PWV estimation
Generally, the ionospheric-free combination of dual-frequency carrier phase and pseudorange (LC, PC) are utilized in PPP processing to eliminate the first-order effects of the ionosphere. The observation equations can be expressed as (Li et al. 2011),
where L and P are the ionospheric-free combinations of carrier phase and pseudorange, ρ is the geometric distance, dt and dT denote the receiver and clock biases, c is the speed of light in vacuum, T is the tropospheric delay, λ is the wavelength, N is the unknown phase ambiguity, and ɛ L and ɛ P denote the measurement noise and multipath error for carrier phase and pseudorange, respectively. The first-order ionospheric delay is eliminated by the ionospheric-free linear combination, the phase center offset and variation, phase wind-up, tidal loading, earth rotation, and relativistic effects can be corrected according to existing models (Kouba 2009). In the GPS/GLONASS combined data processing, different hardware delay biases that exist in the receiving channels (Wanninger 2011) must be taken into account, and the combined observation model can be expressed as,
where the indices G and R k refer to the GPS and GLONASS satellite system, respectively, k denotes the frequency factor for GLONASS satellite as it uses FDMA signals, the terms \(B_{L}^{{R_{k} - G}}\) and \(B_{P}^{{R_{k} - G}}\) denote the receiver internal bias between GLONASS and GPS for carrier phase and pseudorange, respectively. For the GLONASS satellites with different frequency factors, the receiver internal biases \(B_{P}^{{R_{k} - G}}\) are different and their differences are usually called inter-frequency biases (IFB). We set up the code bias parameters for each GLONASS frequency, and the code bias for GPS satellites is set to zero in order to eliminate the singularity between receiver clock and code bias parameters (Dach et al. 2006; Li et al. 2015b). Consequently, the estimated biases of GLONASS are relative to the biases for GPS satellites. It is worthwhile to note that such a receiver internal bias is only relevant for processing the code data, while the corresponding phase ambiguity parameters will absorb the phase delays when analyzing the phase measurements.
The slant total delay T can be modeled by hydrostatic and non-hydrostatic/wet components, which can both be expressed by their individual zenith delays and the corresponding mapping functions, and by the gradient part (Chen and Herring, 1997),
where mf h and mf nh are the hydrostatic and non-hydrostatic mapping functions (here global mapping functions (GMF)), Böhm et al. 2006), mf G is the gradient mapping function, G ns and G ew represent the north–south (NS) and east–west (EW) delay gradient contributions, respectively, a is the azimuth of the line of sight of the individual observation (Li et al. 2015c). The ZHD accounts for about 90 % of the total tropospheric delay and the ZWD for the remaining about 10 % (Davis et al. 1985). The ZHD can be accurately calculated using empirical models such as the Saastamoinen (1973) model involving in situ air pressure information. However, it is difficult to model ZWD with enough accuracy due to its very low mixing ratio with the dry atmospheric constituents, its high temporal variability, and its dependence on atmospheric weather conditions that may significantly differ from the in situ meteorological conditions. Thus, ZWD is usually estimated as an unknown parameter in the adjustment together with the other parameters.
In the real-time PPP ZTD/PWV processing, first the precise satellite orbits and clocks are determined using data of a global GPS + GLONASS ground tracking network. Similar to the procedure of the IGS ultra-rapid orbits, the real-time orbit is predicted (6 h prediction) based on the orbits determined in a batch-processing mode. Then, with fixed satellite orbits and station coordinates, satellite clocks are estimated and updated epoch-wise due to their short-term fluctuations (Zhang et al. 2011). With these real-time orbit/clock corrections and precise station coordinates, the estimated parameter vector \({\mathbf{X}}\) can be described as,
A sequential least square filter is employed to estimate the unknown parameters in real-time processing (Li et al. 2013a). The ZWD and the gradients G ns and G ew are modeled as random walk processes. The noise intensity of the quantity of most interest, ZWD, is about 5–10 mm/√h. The receiver clock bias dt is modeled as white noise process and estimated epoch-wise. The code biases \(B_{P}^{{R_{k} - G}}\) are estimated as constant over time. As mentioned above, the phase biases will be absorbed by the phase ambiguities \({\mathbf{N}}\), and the ambiguity parameters are estimated as constant during each continuous arc. An elevation-dependent weighting strategy is applied as well.
ZWD derived from real-time PPP can be converted into PWV (Askne and Nordius 1987) by,
where ∏ (T m) varies as a function of the weighted mean temperature of the atmosphere T m (Bevis et al. 1992), ρ w = 999.79 kg m−3 represents the density of liquid water, R v = 461.51 J K−1 kg−1 is the specific gas constant of water vapor, k 3 and k′2 denote atmospheric refractivity constants (\(k_{2}^{'} = 22.1 \pm 2.2({\text{K}}\,{\text{hpa}}^{ - 1} ),\) \(k_{3} = 373900 \pm 1200({\text{K}}^{2} \,{\text{hpa}}^{ - 1} ))\). To accurately calculate T m, vertical profiles of water vapor and temperature are required (Davis et al. 1985):
where e denotes the partial pressure of water vapor, and T is the temperature. The information about the two variables can only be obtained from external meteorological resources for the PWV retrieving in this study.
One of the methods to derive T m is presented by Bevis et al. (1992), where T m is described as a linear function of surface temperature observations and vertical temperature lapse rates. However, Wang et al. (2005) pointed out that this empirically calculated mean temperature tends to be less accurate, with a cold bias in the tropics and subtropics, and a warm bias in mid- and high latitudes. This kind of defect of the Bevis model can be attributed to the fact that it only depends on radiosonde observations over the North American territory. In contrast, T m interpolated from the global reanalysis of the ECMWF (European Centre for Medium-Range Weather Forecasts) can well represent the desired quantities at the locations of GNSS stations (Wang et al. 2005). Thus, in this study, T m from ECMWF reanalysis ERA-Interim (http://apps.ecmwf.int/datasets/data/interim_land/) is adopted to perform the conversion from ZWD into PWV.
VLBI data
Various studies have illustrated that VLBI is capable of determining accurate tropospheric delays as well as water vapor content in the vicinity of the VLBI stations (Heinkelmann et al. 2007; Schuh and Behrend 2012). Since GNSS and VLBI observations are subject to the same type of errors in terms of the atmospheric effect, tropospheric parameter derived from VLBI provides an excellent basis for the comparison and validation of parameters retrieved by GNSS, which has been shown by many authors (Teke et al. 2011; Ning et al. 2012). In this study, VLBI data from the latest CONT campaign (CONT14, http://ivs.nict.go.jp/mirror/program/cont14/) are used to validate the real-time ZTD estimates derived from GLONASS and GPS. CONT14 is a special campaign of the International VLBI Service for Geodesy and Astrometry (IVS), aimed at acquiring state-of-the-art VLBI data over a time period of 15 days in order to demonstrate geodetic results of the highest accuracy the current VLBI system is capable of. The CONT14 campaign was observed in the period May 6–20, 2014, with a network size of 17 globally distributed stations. Several stations from this network are colocated with the IGS GNSS stations mentioned above, which will be employed for the comparison and validation here.
For the analysis of VLBI observations acquired during CONT14, the GFZ version of the Vienna VLBI Software (Böhm et al. 2012), VieVS@GFZ, is used, where the unknown parameters are estimated in a classical least squares adjustment. The calculation of the theoretical delays follows the IERS Conventions 2010. The ZHD are modeled using Saastamoinen (1973) model with meteorological data from GPT2 (Lagler et al. 2013), in a consistent way compared to the a priori ZHD for the GNSS data processing. The estimated parameters included clock corrections, earth orientation parameters (EOP), ZWD, and horizontal gradients. The ZWD were parameterized as piece-wise linear functions with interval length of 1 h, and gradients are estimated with interval length of 6 h. Comparable to the GNSS, the GMF are used as hydrostatic and wet mapping functions, and the elevation cutoff angle is set to 5°.
Radiosonde data
Radiosondes directly measure temperature, pressure, and humidity along their flight paths from the launch site upward and communicate their records via a radio signal downlink. The radiosonde balloons are launched every 12 or 24 h per day in most of the cases. As one of the most reliable in situ measurements of water vapor (Rocken et al. 1997; Niell et al. 2001), water vapor retrieved from the radiosonde is taken as another validation of the GLONASS- and GPS-derived PWV. For the comparison, all stations from the abovementioned GPS/GLONASS observing network are employed, where nearby radiosonde launch sites (the distance is smaller than 50 km) are available. The radiosonde data profiles are provided by the National Ocean and Atmospheric Administration (NOAA, http://www.esrl.noaa.gov/raobs/).
In radiosonde data analysis, temperature, pressure, and humidity from the radiosonde profiles are utilized to retrieve PWV (Bevis et al. 1992). If linear water vapor density variation for each vertical level of the radiosonde profile is assumed, the PWV is calculated as,
where the variable ρ v denotes the density of water vapor, ρ w is the density of liquid water, the super- and subscripts i+1 and i denote the top and bottom of each layer for height and water vapor density, T is the temperature, e w is the partial pressure of water vapor, which can be acquired from humidity and temperature, and \(R_{\text{v}} = 461.525\,{\text{J}}\,{\text{K}}^{ - 1} \,{\text{kg}}^{{^{ - 1} }}\) is the specific gas constant of water vapor.
ZTD comparisons between GLONASS and GPS solutions
In order to assess the performance of the GLONASS-derived real-time ZTD/PWV and evaluate the contribution of adding GLONASS to GPS for ZTD/PWV retrieval, we processed about 80 stations from the IGS network for the first half of the year 2014, where the GLONASS and GPS observations are simultaneously available. GLONASS-only, GPS-only, and GPS/GLONASS combined PPP solutions are carried out to generate the ZTD/PWV estimates. All the data are processed in real-time PPP mode with 30-s sampling interval following the description in GNSS data collection and processing section.
Figure 2 exemplarily shows the ZTD time series of two stations during the first half of the year 2014: AUT0 (30.39°N, 97.73°W), Austin, TX, USA, and WARK (36.43°S, 174.66°E), Warkworth, New Zealand. It can be seen that, in general, the GLONASS ZTD agree quite well with the GPS ZTD derived from real-time PPP. Compared to the GPS-only solution, neither an increased number of outliers nor a larger noise appears in the GLONASS-only solution. The scatter plot of ZTD between the two solutions at station AUT0 is displayed in Fig. 3. The correlation coefficient is 0.99, implying very high correlation between the GLONASS ZTD and GPS ZTD.

ZTD derived from GPS-only (“G”) and GLONASS-only (“R”) real-time PPP solutions at stations AUT0 (top) and WARK (bottom) for DOY (day of year) 001–181, 2014

Scatter plot of ZTD between the GLONASS-only and GPS-only solutions at station AUT0
Figure 4 presents the corresponding distributions of ZTD differences between GLONASS-only and GPS-only solutions at the abovementioned stations AUT0 and WARK, during the same time period. The sign convention is GLONASS - GPS. It can be noticed that the ZTD differences range from −15 to +15 mm on average, and the histogram is close to the normal distribution. The root-mean-square (RMS) of the ZTD differences at the two stations is 6.0 and 6.7 mm, respectively, showing an agreement at the level of several millimeters. No obvious systematic biases can be seen between the GLONASS- and GPS-only solutions. The mean values of the differences between GLONASS- and GPS-derived ZTD are 0.4 and −0.5 mm for the two stations, respectively.

Distribution of ZTD differences between GLONASS-only and GPS-only solutions derived from real-time PPP at stations AUT0 (top) and WARK (bottom) for DOY 001–180, 2014
In Fig. 5, the statistical results of ZTD differences between GLONASS-only and GPS-only solutions are shown for about 80 stations. The RMS values of the ZTD differences are about 5–13 mm (which equals 0.8–2.0 mm in PWV), and the mean values of the differences are at the level of a few millimeters (smaller than 1 mm in PWV). In general, the ZTD estimates from GLONASS-only and GPS-only solutions show better agreement for high-latitude stations than for low-latitude stations. There are no significant geographical patterns of systematic biases of ZTD estimates between GLONASS and GPS solutions. This agreement implies that the real-time ZTD/PWV estimates derived from GLONASS observations can significantly contribute to weather nowcasting, with a comparable accuracy as the GPS-only solution.

Geographical distribution of station-specific RMS values (top) and mean biases (bottom) of ZTD differences between GLONASS-only and GPS-only solutions determined with real-time PPP (DOY 001–181, 2014)
In order to further assess the internal consistency of the GLONASS ZTD, data from the colocated GNSS stations are taken into account. Figure 6 shows the ZTD comparison between the two colocated stations WTZR and WTZZ (height difference about 0.1 m) operated at Bad Koetzting, Germany, for the GLONASS-only and the GPS-only solutions. It can be noticed from Fig. 6a that the ZTD derived from the GLONASS-only solutions for the two stations display a rather good agreement. The RMS of the ZTD difference is about 6.2 mm, and the mean value is about 0.3 mm. These results are comparable to those for the GPS-only solutions (shown in Fig. 6b), where the RMS and mean value of the ZTD difference are about 6.6 and 0.4 mm, respectively. It proofs that the ZTD derived from GLONASS show good internal consistency comparable to the GPS.

ZTD comparison for the colocated GNSS stations WTZR and WTZZ (Bad Koetzting, Germany) for DOY 001–101, 2014: a ZTD from the GLONASS-only solutions, b ZTD from the GPS-only solutions
Validations with VLBI and radiosondes
For the purpose of inter-technique validation, the GNSS ZTD series retrieved from real-time PPP processing are compared with that from colocated VLBI stations. VLBI data from the CONT14 campaign are processed for ZTD derivation following the description in VLBI data section. To avoid additional interpolation, only ZTD estimates at common epochs of each ZTD series are taken into account for the comparison. The ZTD biases caused by the height difference between the phase center of GNSS antennas and the reference point of VLBI telescopes are corrected by using the “troposphere ties” method presented by Teke et al. (2011). Figure 7 shows the ZTD comparisons of GPS-only, GLONASS-only, GPS/GLONASS combined and VLBI solutions at the stations WARK (colocated with the VLBI station WARK12M) and TSK2 (colocated with the VLBI station TSUKUB32).

ZTD derived from GPS-only, GLONASS-only, GPS/GLONASS combined (“GR”), and VLBI solutions at colocated stations WARK/WARK12M (top) and TSK2/TSUKUB32 (bottom) for DOY 125–140, 2014, i.e., May 6–20, 2014 (the CONT14 campaign)
It can be noticed that the ZTD of the GLONASS-only, GPS-only and GPS/GLONASS combined solutions all reveal good agreement with the VLBI ZTD. The ZTD estimates of the GLONASS-only solution are comparable with that of the GPS-only solution. The RMS of GLONASS-only solution is 11.5 and 8.0 mm, and the RMS of GPS-only solution is 11.2 and 7.7 mm, respectively, at the two stations WARK and TSK2. Furthermore, the ZTD differences are the smallest for the GPS/GLONASS combined solution, where the RMS is 10.6 and 7.1 mm and the mean values of the differences are −1.0 and 0.36 mm for the two stations.
In Fig. 8, the RMS values of the ZTD differences for the GLONASS-only, GPS-only, and GPS/GLONASS combined solutions with respect to the VLBI solutions are given for five colocated GNSS/VLBI stations (HARB, NYA2, TSK2, WARK, and WTZR). It can be seen that the RMS of ZTD differences between GLONASS- and GPS-only solutions vs. VLBI is around several millimeters (about 1 cm), while the RMS of the combined solution shows the smallest values for all the stations. The RMS of the ZTD differences is 6.1–11.5 mm for the GLONASS-only solution, 6.0–11.2 mm for the GPS-only solution, and 5.1–10.6 mm for the GPS/GLONASS combined solution.

RMS of the ZTD for the GLONASS-only, GPS-only, and GPS/GLONASS combined solutions with respect to the VLBI solution during CONT14
This confirms the abovementioned conclusion that the real-time ZTD retrieved from GLONASS-only solution are accurate and can be assimilated into NWP models and applied in weather nowcasting. Moreover, the GPS/GLONASS combined solutions can improve the accuracy and robustness of retrieved real-time ZTD/PWV compared to the single-system solutions.
The validation of the PWV values derived from the real-time GNSS PPP analysis versus radiosondes PWV is also performed. Figure 9 shows the PWV results retrieved from GPS/GLONASS combined real-time PPP solution and nearby radiosonde solution at station STFU (37.42°N, 122.17°E), Palo Alto, CA, USA. The radiosonde-retrieved PWV is sampled every 12 or 24 h, while the temporal resolution of real-time PWV solutions derived from GNSS is 30 s. Only PWV values at the common epochs are considered for the comparison. It can be noticed that the PWV retrieved from the GPS/GLONASS combined solution agrees well with the radiosonde PWV with differences at the level of few millimeters, and the RMS of the PWV differences between the two solutions is about 1.5 mm.

PWV derived from the GPS/GLONASS combined real-time PPP and radiosonde (“RS”) solutions at station STFU, Palo Alto, CA, USA, during days of year (DOY) 60–150 of 2014
Figure 10 gives the RMS of the PWV differences for the GLONASS-only, GPS-only, and GPS/GLONASS combined solutions with respect to the radiosonde solutions at 12 globally distributed GNSS stations, where nearby radiosonde launch sites (distance smaller than 50 km) are available. The RMS of the two single-system and the combined solutions all stay within 3 mm, which is the threshold accuracy of PWV for assimilation into NWP models (De Haan 2006). The GLONASS-only solution even shows a slightly smaller RMS than the GPS-only solution in some cases (e.g., HOFN and MAS1). The RMS for the combined solution shows the smallest values for almost all the stations. The RMS of the PWV differences is 1.8–2.6 mm for the GLONASS-only solution, 1.6–2.4 mm for the GPS-only solution, and 1.5–2.3 mm for the GPS/GLONASS combined solution. This indicates a potential benefit for real-time PWV retrieval from GLONASS if applied in time-critical meteorological fields such as NWP, nowcasting and severe weather event monitoring compared to GPS. Furthermore, compared to the single-system solutions, higher accuracy and robustness can be achieved with the combination of GLONASS and GPS data in real-time PPP processing for meteorological applications.

RMS of the PWV differences for the GLONASS-only, GPS-only, and GPS/GLONASS combined solutions with respect to the radiosonde solutions. BRUX1 and BRUX2 are two radiosonde stations close to the GNSS station BRUX
Summary, conclusions and discussions
We have developed a real-time ZTD/PWV processing with GLONASS observations only, as well as with the combination of GPS and GLONASS observations. GLONASS and GPS data of about 80 stations from IGS network for the first half of the year 2014 were processed using the real-time PPP technique. The performance of the real-time ZTD/PWV estimates derived from GLONASS was analyzed and assessed, and the contribution of combining GLONASS to the stand-alone GPS solution for ZTD/PWV retrieval has been investigated as well.
The results show that the GLONASS ZTD derived from real-time PPP solution agree well with the GPS ZTD. The RMS values of the ZTD differences between the two solutions range from 5 to 13 mm (what equals a PWV of 0.8–2 mm), and the mean values of the differences are at the level of a few millimeters (usually <1 mm in PWV). Furthermore, the GLONASS ZTD at colocated GNSS stations also show good internal consistency comparable to the ones obtained with GPS.
For validation, ZTD estimates of the two single-system solutions, GLONASS- and GPS-only, show good agreement with the ZTD derived from VLBI. The ZTD differences between the GLONASS-only solution and the VLBI solution are comparable to the ones of the GPS-only solution. The RMS of ZTD differences between the GLONASS-only solution and the VLBI solution is around several millimeters (6.1–11.5 mm), and 6.0–11.2 mm for the GPS-only solution. The ZTD differences are the smallest for the GPS/GLONASS combined solution, for which the RMS ranges from 5.1 to 10.6 mm. For the validation with radiosondes, the PWV from the GPS/GLONASS combined solution agrees quite well with the PWV derived from radiosondes, with differences at the level of a few millimeters, RMS of 1.5–2.3 mm (<3 mm). The PWV of the single-system solutions, GLONASS-only and GPS-only, shows a good agreement with PWV from radiosondes. The RMS of the PWV differences is 1.8–2.6 mm for the GLONASS-only solution and 1.6–2.4 mm for the GPS-only solution. Therefore, we can conclude that GLONASS can contribute to real-time meteorological applications with comparable accuracy to that of GPS, and more robust and accurate ZTD/PWV estimates can be obtained, if the GLONASS observations are added to the GPS observations in real-time PPP mode.
In future, our studies will focus on comparisons and validations involving other techniques, such as water vapor radiometer (WVR) and numerical weather models (NWM), and on a larger number of globally distributed GNSS stations and over a longer time span. Furthermore, the application of real-time PWV retrieval from GLONASS-only or GPS/GLONASS combined solutions in monitoring or nowcasting actual weather events, such as heavy rainfall or other extreme events, will be investigated as well.
References
Askne J, Nordius H (1987) Estimation of tropospheric delay for microwaves from surface weather data. Radio Sci 22:379–386
Bevis M, Businger S, Herring T, Rocken C, Anthes R, Ware R (1992) GPS meteorology: remote sensing of atmospheric water vapor using GPS. J Geophys Res 97:15787–15801
Böhm J, Niell A, Tregoning P, Schuh H (2006) Global Mapping Function (GMF): a new empirical mapping function based on numerical weather model data. Geophys Res Lett 33:L07304. doi:10.1029/2005GL025546
Böhm J, Böhm S, Nilsson T, Pany A, Plank L, Spicakova H, Teke K, Schuh H (2012) The new Vienna VLBI Software VieVS. Geodesy for planet earth. In: Proceedings of the 2009 IAG symposium, Buenos Aires, International Association of Geodesy Symposia Series, vol 136. pp 1007–1011
Bruyninx C (2007) Comparing GPS-only with GPS + GLONASS positioning in a regional permanent GNSS network. GPS Solut 11(2):97–106
Cai C, Gao Y (2013) Modeling and assessment of combined GPS/GLONASS precise point positioning. GPS Solut 17(2):223–236
Caissy M, Agrotis L, Weber G, Hernandez-Pajares M, Hugentobler U (2012) The international GNSS real-time service. GPS World 23(6):52–58
Chen G, Herring T (1997) Effects of atmospheric azimuthal asymmetry on the analysis of space geodetic data. J Geophys Res 102(B9):20489–20502. doi:10.1029/97JB01739
Dach R, Schaer S, Hugentobler U (2006) Combined multi-system GNSS analysis for time and frequency transfer. Proc Eur Freq Time Forum 2006:530–537
Dach R, Schmid R, Schmitz M, Thaller D, Schaer S, Lutz S, Steigenberger P, Wübbena G, Beutler G (2011) Improved antenna phase center models for GLONASS. GPS Solut 15(1):49–65
Davis J, Herring T, Shapiro I, Rogers A, Elgered G (1985) Geodesy by radio interferometry: effects of atmospheric modeling errors on estimates of baseline length. Radio Sci 20(6):1593–1607. doi:10.1029/RS020i006p01593
De Haan S (2006) National/regional operational procedures of GPS water vapour networks and agreed international procedures. Rep WMO/TD-No, 1340:20. KNMI, Netherlands
Dousa J (2010) Precise near real-time GNSS analyses at geodetic observatory Pecny-precise orbit determination and water vapour monitoring. Acta Geodyn Geomater 7(157):7–17
Dousa J, Vaclavovic P (2014) Real-time zenith tropospheric delays in support of numerical weather prediction applications. Adv Space Res 53(9):1347–1358
Dow J, Neilan R, Rizos C (2009) The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J Geod 83(3):191–198. doi:10.1007/s00190-008-0300-3
Elgered G, Plag H, van der Marel H, Barlag S, Nash J (eds.) (2005) COST 716: exploitation of ground-based GPS for climate and numerical weather prediction applications, final report, European community, EUR 21639. ISBN 92-898-0012-7
Gendt G, Dick G, Reigber C, Tomassini M, Liu Y, Ramatschi M (2004) Near real-time GPS water vapor monitoring for numerical weather prediction in Germany. J Meteorol Soc Jpn 82:361–370
Gutman S, Sahm R, Benjamin G, Schwartz E, Holub L, Stewart Q, Smith L (2004) Rapid retrieval and assimilation of ground based GPS-Met observations at the NOAA forecast systems laboratory: impact on weather forecasts. J Meteorol Soc Jpn 82:351–360
Haan S, Barlag S, Baltink H, Debie F (2004) Synergetic use of GPS water vapor and meteosat images for synoptic weather forecasting. J Appl Meteorol 43:514–518
Heinkelmann R, Böhm J, Schuh H, Bolotin S, Engelhardt G, MacMillan D, Negusini M, Skurikhina E, Tesmer V, Titov O (2007) Combination of long time-series of troposphere zenith delays observed by VLBI. J Geod 81(6–8):483–501
Kouba J (2009) A guide to using international GNSS service (IGS) products. http://igscb.jpl.nasa.gov/igscb/resource/pubs/UsingIGSProductsVer21.pdf
Lagler K, Schindelegger M, Boehm J, Krásná H, Nilsson T (2013) GPT2: empirical slant delay model for radio space geodetic techniques. Geophys Res Lett 40:1069–1073. doi:10.1002/grl.50288
Li X, Zhang X, Ge M (2011) Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. J Geod 85:151–158
Li X, Ge M, Zhang H, Wickert J (2013a) A method for improving uncalibrated phase delay estimation and ambiguity-fixing in real-time precise point positioning. J Geod 87(5):405–416
Li X, Ge M, Zhang X, Zhang Y, Guo B, Wang R, Klotz J, Wickert J (2013b) Real-time high-rate co-seismic displacement from ambiguity-fixed precise point positioning: application to earthquake early warning. Geophys Res Lett 40(2):295–300. doi:10.1002/grl.50138
Li X, Dick G, Ge M, Heise S, Wickert J, Bender M (2014) Real-time GPS sensing of atmospheric water vapor: precise point positioning with orbit, clock and phase delay corrections. Geophys Res Lett 41(10):3615–3621
Li X, Zhang X, Ren X, Fritsche M, Wickert J, Schuh H (2015a) Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci Rep 5:8328
Li X, Ge M, Dai X, Ren X, Fritsche M, Wickert J, Schuh H (2015b) Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J Geod 89(6):607–635
Li X, Zus F, Lu C, Ning T, Dick G, Ge M, Wickert J, Schuh H (2015c) Retrieving high-resolution tropospheric gradients from multiconstellation GNSS observations. Geophys Res Lett 42:4173–4181. doi:10.1002/2015GL063856
Niell A, Coster A, Solheim F, Mendes V, Toor P, Langley R, Upham C (2001) Comparison of measurements of atmospheric wet delay by radiosonde, water vapor radiometer GPS, and VLBI. J Atmos Ocean Technol 18:830–850
Nilsson T, Elgered G (2008) Long-term trends in the atmospheric water vapor content estimated from ground-based GPS data. J Geophys Res 113:D19101. doi:10.1029/2008JD010110
Ning T, Haas R, Elgered G, Willén U (2012) Multi-technique comparisons of 10 years of wet delay estimates on the west coast of Sweden. J. Geod 86(7):565–575. doi:10.1007/s00190-011-0527-2
Rocken C, Van Hove T, Ware R (1997) Near real-time sensing of atmospheric water vapor. Geophys Res Lett 24:3221–3224
Saastamoinen J (1973) Contributions to the theory of atmospheric refraction—part II. Refraction corrections in satellite geodesy. Bull Géod 47(1):13–34. doi:10.1007/BF02522083
Schuh H, Behrend D (2012) VLBI: a fascinating technique for geodesy and astrometry. J Geodyn 61:68–80. doi:10.1016/j.jog.2012.07.007
Shi J, Xu C, Guo J, Gao Y (2015) Real-time GPS precise point positioning-based precipitable water vapor estimation for rainfall monitoring and forecasting. IEEE Trans Geosci Remote Sens 53(6):3452–3459. doi:10.1109/TGRS.2014.2377041
Teke K, Boehm J, Nilsson T, Schuh H, Steigenberger P, Dach R, Heinkelmann R, Willis P, Haas R, Garcia-Espada S, Hobiger T, Ichikawa R, Shimizu S (2011) Multi-technique comparison of troposphere zenith delays and gradients during CONT08. J. Geod 85:395–413. doi:10.1007/s00190-010-0434-y
Wang J, Zhang L, Dai A (2005) Global estimates of water-vapor-weighted mean temperature of the atmosphere for GPS applications. J Geophys Res 110:D21101. doi:10.1029/2005JD006215
Wanninger L (2011) Carrier-phase inter-frequency biases of GLONASS receivers. J Geod. doi:10.1007/s00190-011-0502-y
Yuan Y, Zhang K, Rohm W, Choy S, Norman R, Wang C (2014) Real-time retrieval of precipitable water vapor from GPS precise point positioning. J Geophys Res Atmos 119:10044–10057
Zhang X, Li X, Guo F (2011) Satellite clock estimation at 1 Hz for real-time kinematic PPP applications. GPS Solut 15(4):315–324. doi:10.1007/s10291-010-0191-7
Zumberge J, Heflin M, Jefferson D, Watkins M, Webb F (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res 102(B3):5005–5017
Acknowledgments
We acknowledge IGS for providing the GPS and GLONASS data, IVS for providing the VLBI data, and NOAA for the online provision of radiosonde data. One of the authors (C. Lu) is supported by the China Scholarship Council, which is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Lu, C., Li, X., Ge, M. et al. Estimation and evaluation of real-time precipitable water vapor from GLONASS and GPS. GPS Solut 20, 703–713 (2016). https://doi.org/10.1007/s10291-015-0479-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-015-0479-8