
Abstract
Observation data sets from three different periods and 23 International GNSS Service (IGS) stations spread over the world were processed in static mode using four online free precise point positioning (PPP) services: Automatic Precise Positioning Service (APPS), GPS Analysis and Positioning Software, Canadian Spatial Reference System precise point positioning service, and Magic-PPP. The estimated positions of the 23 IGS stations were compared with the published values. The estimated zenith tropospheric delays (ZTDs) at these stations were compared with the corresponding IGS troposphere products published on the IGS Web site. Furthermore, in order to analyze PPP precision for short observation periods, GPS observation data sets with a sampling rate of 1 s collected by one CORS station were also processed by the four online PPP services. Calculation shows that the precision of daily solutions for north and east (N/E) components estimated by the four online PPP services can reach millimeter level, the precision of ellipsoid elevation (H) can reach 1–2 cm, and precision of ZTDs estimation results is approximately 1–2 cm. Compared with the corresponding values published on the IGS Web site, the precision of ZTDs estimated by APPS is higher than those estimated by the other three PPP online services; the differences between ZTDs by APPS and IGS values are mostly within ±1 cm. For PPP with short observation periods, the precision of N/E components within 2, 1, and 0.5 h observation periods can reach about 2–3, 2–7, and 3–8 cm, respectively, while the precision of H components is about 3–5, 5–12, and 10–18 cm, respectively.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The precise point positioning (PPP) technique does not require data from Continuously Operating Reference System (CORS) stations in the proximity of users. In recent years, PPP theory has developed quickly (Zumberge et al. 1997; Kouba and Heroux 2001; Bertiger et al. 2010; Grinter and Roberts 2011, 2013). Some universities and research institutes have developed PPP software packages and released online PPP processing services. Such online PPP services are open to users and are free of charge. These services are available 24-h per day. The users only need to upload or submit GNSS observation data files in standard or compressed RINEX format to the designated servers. The online PPP services can download the corresponding precise ephemerides and clock corrections from IGS Web sites and process the uploaded data files automatically. The calculated results will be placed on the service Web site or sent to users by E-mail. The results include not only precise coordinates and quality information of user stations in the International Terrestrial Reference Frame (ITRF) but also ionospheric delays, tropospheric delays, and receiver clock corrections. Relevant services are AUSPOS (Geoscience Australia), SCOUT (American SOPAC center), OPUS (American National Oceanic and Atmospheric Administration—NOAA), APPS, GAPS, CSRS-PPP, and Magic-PPP. The services APPS, GAPS, CSRS-PPP, and Magic-PPP provide estimated zenith tropospheric delays (ZTDs).
Precise point positioning (PPP) is gaining more popularity in the GNSS scientific community. Ghoddousi-Fard and Dare (2006) compared and analyzed static coordinate results obtained from five online services (AUSPOS, SCOUT, OPUS, Auto-GIPSY, and CSRS-PPP) using observation data sets from eight worldwide GNSS stations. Xu (2011) compared the static results of the same data set estimated by six online services, which are APPS, CSRS-PPP, OPUS, AUSPOS, SCOUT, and Magic GNSS. In fact, AUSPOS, SCOUT, and OPUS utilize relative positioning to determine the coordinates of a GNSS station by establishing a network consisting of nearby IGS stations.
Gao et al. (2011) analyzed static and kinematic results of several IGS stations processed by four online PPP services (APPS, GAPS, CSRS-PPP, and Magic-PPP). Martín et al. (2011) also compared coordinate differences obtained from these four online PPP services with results generated by the Bernese software using daily observation files from eight IGS stations. Calculation results show that there is a high level of agreement among the different post-processing software used (BERNESE v5.0, APPS, CSRS-PPP, GAPS, and Magic GNSS) for horizontal components (at the centimeter level) and for the up component with the exception of GAPS.
However, above-mentioned performance studies of different online GNSS data processing services only analyzed and compared the 3D coordinates of stations. They did not involve other estimated results of online PPP services, such as atmospheric delays. Moreover, with the development of PPP theory and technology, these online PPP service systems also strive to improve PPP algorithms and service performance. Therefore, the software versions are updated constantly. For example, GAPS released its latest version 5.2.0 in July 2013; CSRS-PPP updated GNSS processing software from version 05211 to version 03812 in January 2013; then updated to version 34613; and updated some models again in March 2014. The objective of this research is to analyze the precision of PPP and ZTD estimations obtained from online PPP services APPS, GAPS, CSRS-PPP, and Magic-PPP as currently implemented and compare the results with values published on the IGS Web site.
Introduction of the four online PPP service systems
Automatic Precise Positioning Service (APPS) system was developed by the Jet Propulsion Laboratory (JPL). It supports standard or compressed RINEX format data files and uses JPL precise ephemeris and clock correction products (http://apps.gdgps.net/apps_howtouse.php). Users only need to upload observation data files to the APPS service Web site. The online APPS service system can process the user’s data file quickly. Registered users can set up elevation angle cutoff and solution output rate. The results can be downloaded directly on the service Web site, and the position of the user station is also displayed on the Google Map directly. The results processed by APPS mainly include a summary file that contains 3D coordinates (X, Y, Z)/(B, L, H) of the user station in ITRF2008 and zenith tropospheric delays of every resolution epoch (Altamimi et al. 2011).
GPS Analysis and Positioning Software (GAPS) was designed and developed by the University of New Brunswick (UNB). It is a very useful tool for GNSS positioning and is called “Swiss Knife” for GPS data analysis (Leandro et al. 2007). Observation data files can be submitted on the GAPS service Web site, and processed results will be sent to users by E-mail a few minutes or hours later. The Web site also provides user interactive setups for some parameters such as positioning mode, elevation angle cutoff, and a priori neutral atmosphere delay prediction model. The results involves various estimated parameters including station coordinates, receiver clock errors, neutral atmosphere delays, ionospheric delays, code biases, and some figures concerning coordinate convergence, neutral atmospheric zenith delays, and vertical ionospheric delays.
Canadian Spatial Reference System Precise Point Positioning service (CSRS-PPP) has been provided by the geodesy department of Canada’s natural resources since 2003. The PPP processing is based on the International GNSS Service (IGS) precise orbit and clocks products, satellite antenna phase center offsets, and tropospheric delay model (including dry and wet component and mapping functions) (Dow et al. 2009). CSRS-PPP generates two forms of output results: summary reports (short and detailed) and graphical time series plots. All output results can be downloaded from the link provided by the PPP service in replied E-mail. The short summary report includes session results and critical statistics information giving the “vital signs” of the solutions. It is useful for quickly validating the PPP results. The detailed summary is available in two text files: One is the file with.sum filename extension which contains results of the observation period; the other is the file with.pos filename extension which contains epoch-by-epoch parameter estimations.
Magic-PPP is an Internet-based service developed by the company of GMV in Spain. Magic-PPP has been conceived as a multi-constellation system. It currently supports GPS and GLONASS, and it is Galileo ready. Magic-PPP offers three different services: post-processing service, E-mail service and real-time service. Users can upload standard/compressed RINEX observation data files on the service Web site or by E-mail. The output results mainly include the precise coordinates of the user station, estimations of zenith tropospheric delays, and receiver clock errors. The results also contain a complete report concerning input data quality, estimation process, and positioning quality. GMV is currently developing Magic-PPP-RT (real-time) terminals, compatible with most commercial receivers available in the market (http://magicgnss.gmv.com/ppp).
The main features of above online PPP services are given in Table 1. Also there are no restrictions concerning the observation interval of uploaded observation data files when using these online PPP services.
Comparison and analysis of static PPP results
The four online PPP services provide station coordinates in the ITRF frame and ZTD estimates at the user stations. In order to evaluate the performance of the services, analysis, and comparisons are conducted regarding three aspects. First, static positioning results using daily observation data sets of 23 IGS stations are compared with IGS reference values to analyze the precision of static PPP for long observation periods. Second, ZTD estimates at these stations are compared with the corresponding IGS ZTD products to analyze the precision of ZTD estimates in static PPP mode. Last, static PPP processing results for various short observation periods are compared with reference values to analyze PPP performance of precision and convergence for short observation periods.
Data description
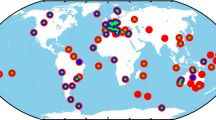
Our analysis included the IGS stations that are shown in Fig. 1. For each station, daily 24 h observation files at three different observation periods in 2013 were downloaded from the SOPAC Web site (http://sopac.ucsd.edu/cgi-bin/dbDataByDate.cgi). The interval of observation data is 30 s. The selected observation periods are named period 1 (April 28–30), period 2 (July 5–7), and period 3 (December 15–17). Different periods in the year were chosen to reflect different atmospheric conditions.

Geographical location of 23 IGS stations used in this study. The following association is used for graphical purposes: (1) ALIC, (2) AMC2, (3) ANTC, (4) BAKE, (5) BJCO, (6) BJFS, (7) BRAZ, (8) CHAN, (9) DAV1, (10) GUAT, (11) HYDE, (12) LHAZ, (13) NRIL, (14) NTUS, (15) ROAP, (16) SHAO, (17) TITZ, (18) URUM, (19) WGTN, (20) WILL, (21) WIND, (22) WUHN, and (23) YAKT
For these IGS stations, each daily data file of dual-frequency observations was processed by the online PPP services, respectively (default options are used). The corresponding geographic coordinates and ellipsoid heights of the stations were obtained from the Web site (http://sopac.ucsd.edu/processing/coordinates). The corresponding ZTDs of the stations were obtained from the Web site (ftp://cddis.gsfc.nasa.gov/gps/products/troposphere). They are considered as “reference values” to analyze the precision of the online PPP solutions. All figures and tables show deviations from these reference values.
Also GPS dual-frequency observation data sets from a CORS station in Shan Dong Jian Zhu (SDJZ) University were processed by the online PPP services to further analyze the precision and convergence of PPP for short observation periods. The interval of observation data is 1 s. The “reference values” of the SDJZ CORS station were obtained from the AUSLIG Online GPS Processing System (AUSPOS) service which uses Bernese software to solve user station coordinates utilizing with IGS precise products, earth rotation parameter, and some IGS station coordinates. The results of AUSPOS have high precision (http://www.ga.gov.au/earth-monitoring/geodesy).
Precision analysis of static positioning results
All selected daily observation data sets were submitted to the online PPP service Web sites and were processed with static mode. Most of the data sets were successfully processed, and results were downloaded. The estimated longitudes and latitudes of the selected stations were transformed to north (N) and east (E) components using Universal Transverse Mercator (UTM) projection. The coordinate differences between static estimated results of N/E/H components of these stations and the corresponding IGS reference values are calculated for each day for the three periods. Then standard deviations of N/E/H components are calculated for each day using the differences. The mean standard deviation is the average value of standard deviations for each period.
Figure 2 gives the bar diagrams of mean standard deviation of coordinate components. The figure shows that the standard deviations of N/E components estimated by the online PPP services are about 0.5 cm, and all of them are less than 1.0 cm, while the standard deviations of H components are within 1.0–2.0 cm.

Bar diagrams of mean standard deviation of N/E/H components in different periods
Statistical summaries of PPP static results are given in Table 2. Max and Min represent the largest and smallest absolute difference between estimated values and reference values. The table shows that the mean biases of N/E components are less than 1 cm, and the maximal biases are less than 2.0 cm, while the mean biases of H components are about 1.0 cm, and the maximal biases of H components are larger than 3.0 cm.
In order to represent and compare the differences between the online PPP static solutions and the IGS reference values, biases of N/E/H components between daily estimated results and the reference values are calculated. The mean biases of N/E/H components over all 9 days of the stations are also calculated and given in Fig. 3. The figure shows that the mean biases of N/E components are less than 1 cm, and the mean biases of H components are about 1.0–2.0 cm except for a very few stations.

Mean biases of N/E/H components of the stations
In summary, from Figs. 2 and 3 and Table 2, we can see that compared with reference values, the precision of N/E components of using daily observation data sets can reach the millimeter level, and the precision of H components reaches about 1–2 cm. There is no obvious difference between the four online PPP services as to coordinate estimations, basically all can reach centimeter to millimeter level. These results are in-line with previous studies of PPP.
Comparison and precision analysis of ZTDs estimations
Daily zenith tropospheric delays (ZTDs) of IGS stations can be obtained from the Web site (ftp://cddis.gsfc.nasa.gov/gps/products/ troposphere). The precision and accuracy of the ZTDs with 5 min interval by IGS are all very high since November 4, 2006 (Kouba 2009). The processed results of APPS, GAPS, CSRS-PPP, and Magic-PPP all include ZTD estimates in addition to coordinates and quality information.
In order to analyze the precision of ZTD estimations, the daily ZTD files (5 min interval) of the stations were downloaded from the Web site and were considered as reference values. The ZTDs estimated by the online PPP services are compared and analyzed with the corresponding IGS reference values. The differences between the ZTD estimates and the reference values are calculated for every resolution epoch. Standard deviations of ZTDs are calculated for each selected station and for each day using the differences. The mean standard deviation is the mean value of the 9 days of standard deviations for the three periods.
Figure 4 gives bar diagrams of mean standard deviation of the ZTD estimates. The figure shows that standard deviations of the ZTD estimates are about 0.5–1.0 cm. In contrast, standard deviations of the ZTDs estimated by APPS are mostly less than 0.5 cm and obviously smaller than those estimated by the other online PPP services. Standard deviations of ZTD estimates by GAPS and CSRS are very consistent.

Bar diagrams of standard deviations of ZTD estimates
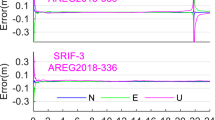
Comparisons of ZTD differences between estimations and the reference values for six typical IGS stations are given in Fig. 5. Figure 5 shows that most of the differences between ZTD estimates and reference values are within ±0.1 cm. In contrast, the ZTDs estimated by APPS are closest to the reference values, and second is Magic-PPP. The differences between ZTD estimates by CSRS and GAPS and reference values are a little bit larger than those by APPS and Magic-PPP. Figure 5 also shows that the biases of the ZTDs estimated by CSRS and GAPS are always very large in the first few epochs and can reach a few centimeters even dozens of centimeters. This is because of CSRS and GAPS offering a “forward-only” solution from a sequential least squares adjustment.

Comparison of ZTDs differences between estimations and reference values for six typical stations
For further evaluation of the precision of ZTD estimates, range statistics of absolute ZTD differences between estimates and the reference values are computed for daily solutions of the stations in the periods. According to the magnitude of the absolute ZTD differences, we establish three difference ranges, i.e., 0–1, 1–2, and 2–3 cm. The number of absolute ZTD differences within the three ranges is counted for each of the stations, respectively. Percentage is the ratio of the number of ZTD absolute differences within one range over total number of all absolute ZTD differences. Mean percentages of the stations are calculated for the online PPP services.
Table 3 shows that compared with the reference values, 94 % of the ZTD differences by APPS are within 0–1 cm on average; 5.5 percent of the ZTD differences are within 1–2 cm; and only about 0.5 percent of the ZTD differences are within 2–3 cm, which means that more than 99 % of ZTD differences are within 0–2 cm for APPS. About 82, 86, and 89 % of the ZTD differences are within 0–1 cm, and only about 4.4, 3.4, and 3.0 % of the ZTD differences are within 2–3 cm for GAPS, CSRS, and Magic-PPP, respectively. That is to say, about 95, 96, and 97 % of the ZTD differences are within 0–2 cm for GAPS, CSRS, and Magic-PPP, respectively. The table also shows that the ZTDs estimated by APPS are slightly closer to the IGS values than those of the other PPP services.
Analysis of static PPP results for short observation periods
In order to further analyze precision and convergence of PPP for different short observation periods (0.5, 1 and 2 h), dual-frequency GPS observation data sets from the SDJZ CORS station (August 31–September 5, 2012) were also processed by the four online PPP services. Comparisons of the mean absolute differences between estimated N/E/H components and reference values for different short observation periods are shown in Fig. 6.

Comparisons of static results of SDJZ CORS station for short observation periods. Top: 0.5 h observation period (16:00–16:30), middle: 1 h observation period (16:00–17:00), bottom: 2 h observation period (16:00–18:00)
Figure 6 shows that the biases of PPP solutions decrease obviously with the increasing observation period. The differences between estimated N/E components and reference value are about 2–3 cm with 2 h observation periods, about 2–7 cm with 1 h observation period, and about 3–8 cm with 0.5 h observation period, while the differences between estimated H components and reference values are about 3–5, 5–12, and about 10–18 cm, respectively. Compared with the reference values, the precision of the estimated N/E/H components obviously improves with increasing of observation time, especially for H components. The precision of the H components improves about 5 cm from 0.5 to 1 h observation period and for the 1–2 h observation period. There is no obvious difference among the four online PPP services for N/E/H component estimations with 2 h observation period.
Conclusions
The precision and convergence of PPP and ZTD estimates using four online PPP service systems with 23 IGS stations and one GNSS CORS station were analyzed and compared. The free online PPP services of APPS, GAPS, CSRS-PPP, and Magic-PPP all can provide centimeter level even millimeter level precision of single station with long observation period in static mode. Compared with IGS solutions, the precision of daily solutions of horizontal components estimated by the online PPP services can reach the millimeter level, and the precision of ellipsoid elevation reaches about 1–2 cm level. The study results are in-line with those of previous studies of PPP. APPS, GAPS, CSRS-PPP, and Magic-PPP can all estimate and output ZTDs of user stations. The ZTD estimation precision can reach 1–2 cm.
For short observation periods of PPP, the horizontal precision is about 2–3 cm with 2 h period, 2–7 cm with 1 h period, and 3–8 cm with 0.5 h period, respectively, while the precision of H component is about 3–5 cm with 2 h period, 5–12 cm with 1 h period, and 10–18 cm with 0.5 h period, respectively.
With the free online PPP services, users do not require software investment; positioning precision with 1–2 cm even millimeter level can be obtained only using single receiver without requiring data from CORS stations in the proximity. While convergence time of PPP needs to be further shortened, and the precision of PPP solutions, especially H component, also needs to be improved with short observation period.
References
Altamimi Z, Collilieux X, Métivier L (2011) ITRF2008: an improved solution of the international terrestrial reference frame. J Geodesy 85(8):457–473
Bertiger W, Desai SD, Haines B et al (2010) Single receiver phase ambiguity resolution with GPS data. J Geodesy 84(5):327–337
Dow JM, Neilan RE, Rizos C (2009) The International GNSS Service in a changing landscape of global navigation satellite systems. J Geodesy 83(3–4):191–198
Gao P, Guo F, Lv C, Tang L (2011) Precision analysis and comparison of on-line precise point positioning services. Glob Position Syst 3:21–24
Ghoddousi-Fard R, Dare P (2006) Online GPS processing services: an initial study. GPS Solut 10(1):12–20
Grinter T, Roberts C (2011) Precise point positioning: where are we now? International Global Navigation Satellite Systems Society IGNSS symposium 2011, Sydney, NSW, Australia, 15–17 November
Grinter T, Roberts C (2013) Real time precise point positioning: are we there yet? International Global Navigation Satellite Systems Society IGNSS symposium outrigger, Gold Coast, QLD, Australia, 16–18 July
Kouba J (2009) A guide to using International GNSS Service (IGS) products. http://igscb.jpl.nasa.gov/components/usage.html
Kouba J, Heroux P (2001) Precise point positioning using IGS orbit and clock products. GPS Solut 5(2):12–28
Leandro RF, Santos MC, Langley RB (2007) GAPS: the GPS analysis and positioning software—a brief overview. In: Proceedings of the ION GNSS 2007, Institute of Navigation, 25–28, September, Fort Worth, TX, pp 1807–1811
Martín A, Anquela AB, Capilla R, BernéJ L (2011) PPP technique analysis based on time convergence, repeatability, IGS products, different software processing, and GPS + GLONASS constellation. J Surv Eng 137(3):99–108
Xu YB (2011) The precision comparison and analysis of online PPP software. Geomat Spat Inf Technol 34(4):167–169
Zumberge J, Heflin M, Jefferson D, Watkins M, Webb FH (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res 102(B3):5005–5017
Acknowledgments
This research is supported by the National Natural Science Foundation of China (41301509) and Shandong Provincial Department of Housing and Urban Rural Construction Technology Project Plan (KY026). The author greatly appreciates the efforts of the IGS, the analysis and data Center, and the tracking stations managers for generating high-quality data and products, and making them available to the GNSS community in a timely and reliable manner. The author also thanks the online PPP software service systems and their valuable comments on how to use the online PPP services. The author also greatly appreciates the two anonymous reviewers for their comments on this manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Guo, Q. Precision comparison and analysis of four online free PPP services in static positioning and tropospheric delay estimation. GPS Solut 19, 537–544 (2015). https://doi.org/10.1007/s10291-014-0413-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-014-0413-5