
Abstract
This work focuses on the performances of Locata technology in single point positioning using different firmware versions (v2.0 and v4.2). The main difference is that the Locata transmitters with firmware v2.0 are single frequency, whereas in the v4.2, they are dual frequency. The performance of the different firmware versions has been measured in different environments including an urban canyon-like environment and a more open environment on the roof of the Nottingham Geospatial Building. The results obtained with firmware v4.2 show that with more available signals, cycle slips can be more easily detected, together with the improvement of the detection of multipath fading on the received signal. As a result, the noise level on the carrier phase measurements recorded with firmware v4.2 is equal on average to a third of the level of noise on the measurements recorded with firmware v2.0. In addition, with either firmware, the accuracy of the position is at the sub-centimeter level on the East and North coordinates. The Up coordinate accuracy is generally less accurate and more sensitive to the geometry of the network in our experiments. We then show the importance of the geometry of the Locata network on the accuracy of Locata positioning system through the demonstration of the relationship between the dilution of precision value and the confidence ellipse. We also demonstrate that the model of the noise on the Locata coordinates is a white Gaussian noise with the help of the autocorrelation function. To some extent, this technique can help to detect whether the Wi-Fi technology is interfering with the Locata technology and degrades the positioning accuracy.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Since the beginning of the global positioning system (GPS) concept (1978), ground-based transmitters (or pseudolites) have been under development to compliment satellite constellations. They have been used to test GPS system elements and enhance GPS in certain applications by providing better accuracy, integrity, or availability through the use of pseudolite signals in addition to the GPS signals. Since then, numerous pseudolite applications have been attempted: local area augmentation system (LAAS), plane landing, bridge deformation monitoring, open pit mining, and reducing street works (Bartone and Graas 2000; Meng et al. 2003; Pervan et al. 1998; Barnes et al. 2006; Montillet et al. 2007). However, there are many fundamental issues that limit the effectiveness of a pseudolite system using C/A code on L1/L2. They include the illegality of transmitting on L1/L2, cross-correlation between pseudolites and GPS signals (GPS jamming), saturation of the GPS receiver front end, and the limited multipath mitigation offered by C/A codes. Pseudolites are unsynchronized systems (Meng et al. 2003). Two decades ago, attempts to synchronize pseudolites resulted in position solutions that are up to six times worse in comparison with an unsynchronized approach using double differencing (Barnes et al. 2006).
Since 2002, Locata technology has been welcomed as a breakthrough in ground-based positioning technologies allowing point positioning of a rover with centimeter accuracy (using carrier phase) (Barnes et al. 2006; Montillet et al. 2007). The main differences from the standard pseudolite concept are as follows: Digital signal and direct sequence code division multiple access (DS-CDMA) is used in order to combat near-far effect, noise, and interference; for multipath mitigation purposes, a Locata transmitter (LocataLite) consists of two spatially separated transmitting antennas in addition of clustering the transmitted signals (Bonenberg et al. 2011).
In brief, a network of LocataLites has one master device with other transmitters acting as slaves. To maintain a constant timeframe, slave units synchronize with the master that transmits network time, using a specific procedure (Montillet et al. 2009). A slave can also synchronize with another slave (cascade synchronization) if the master is not visible. Each LocataLite setup consists of two transmitting (Tx1 and Tx2) and one receiving (Rx) antennas.
Table 1 shows the improvements of both hardware and firmware of the Locata prototype through different versions (2002–2012). Understanding legal difficulties in transmitting on the restricted GPS L1 frequency, Locata is transmitting in the 2.4 GHz (starting from v2.0).
In February 2007, the University of Nottingham purchased a prototype system (with v2.0 firmware) to solve the challenge of precise positioning in urban canyons (Montillet et al. 2007). Although Locata technology showed a great potential to solve the urban canyon challenges, the reliability of its accuracy was overshadowed at this time by in-band interferences with nearby Wi-Fi access points (Montillet et al. 2009; Khan et al. 2010a, b).
From v3.0 onward, the system has started utilizing dual frequencies (Table 1) allowing each LocataLite to transmit 4 signals, using two antennas and two frequencies (referred to as S1 and S6). Khan et al. (2010b) investigated the reliability of the Locata positioning solution with a short baseline between the two Locata rovers. Recently, Bonenberg et al. (2011) and Peters (2011) investigated the feasibility of integration of Locata technology with the GPS by addressing a list of the advantages, such as solving the challenge of precise positioning in urban canyons. We aim at quantifying the evolution of the Locata firmware by comparing v2.4 and v4.2, through a statistical study of the Locata signal (carrier phase measurements) and the estimated rover’s position (centimeter-level accuracy). The following part is dedicated to the statistical study of the Locata carrier phase signal using different versions of the firmware (namely v2.4 and v4.2) and in various environments around the University of Nottingham. The third section analyses the Locata rover coordinates, and it ends with the noise model of the coordinate time series without Wi-Fi interferences. In addition, the section emphasizes the impact of the geometric dilution of precision of the Locata network (LocataNet) on the estimated rover coordinates. At the end, the autocorrelation function is used to detect possible Wi-Fi interferences in the coordinate time series.
Study of the Locata carrier phase signal
Here, the case studies are described where the experiments took place to test the various firmware upgrades. The Locata signal model is also emphasized. Finally, the performances are analyzed with the statistics of the carrier phase signal.
Experiments and case studies
The LN1 case study is an urban canyon also called the Nottingham LocataNet 1 described in (Roberts et al. 2007; Montillet et al. 2009). Eight LocataLites are set up at the same level as the rover and on the roof of two nearest buildings. The PARKING case study is an open car park on the University of Nottingham campus. Six Locata transmitters are set up in a circle with a radius of 150 m around the rover. The environment is considered as static during the recording of the measurements (no cars around or close to the transmitters and rover). One transmitter is set up on the roof of a nearby building. Note that PARKING was set up identically to IESSG car park described in (Montillet et al. 2007). The firmware v2.0 was used to record the data in these two cases. When using firmware v2.0, the measurements selected in this study are accurate enough (i.e., mean error on the rover position better than 5 cm) to make the hypothesis that the Wi-Fi transmission did not interfere with the Locata signal while recording the data sets. The LN2 case study is set up on the roof of the Nottingham Geospatial Building at the time of writing this article. The roof size is 35 m long by 25 m large as shown in Fig. 1. The 6 Locata units were installed around the rover, attached to the edge of the building in equidistant way. An additional unit (Master) is set up close to the rover (5 m) which is mounted roughly in the center of the network (see black cross in Fig. 1). The eight shape in the middle is the track of a train to carry on GNSS measurements as described in (Bonenberg and Hancock 2010). Note that the Wi-Fi access points are located on the two levels below the roof one. While recording the measurements, the Wi-Fi points were active. This setup is motivated to mimic a construction site, where the access to the surrounding buildings is limited and thus restraining the design of the LocataNet. The two experiments (LN2-1 and LN2-2) used the firmware v4.2. As described in (Misra and Enge 2001), the received signal from the transmitters is subject to multipath due to scatterers (walls, surrounding buildings, metal objects) situated in the vicinity of the rover.

Sketch of the LN2-1 and LN2-2 experiments (LocataLites (yellow circles), roof entrance (red arrow), rover place (green triangle), master LocataLite setup (black cross), approximate location of the Wi-Fi access points (red box))
Locata measurement model
According to (Barnes et al. 2004), the carrier phase signal transmitted by this new technology is described by:
where r A is the geometrical range between the Locata transmitter A and the rover; \( \tau_{\text{trop}} \) is the error due to the troposphere propagation effect; \( N_{\text{A}}^{j} \) is the (float) ambiguity; λ is the wavelength; c is the speed of light; and \( \varepsilon_{\text{A}}^{j} \) is the propagation error on the phase measurement. Note that \( \delta T_{\text{A}} \) is the clock error residual of the rover for LocataLite A.
As previously mentioned, the Locata technology has been evolving from a single frequency prototype (firmware v2.4) to a dual frequency system (v3.0, v4.0, v5.0). In single frequency, the ambiguity is solved as a float value while the rover starts on a known point at the beginning of the measurements (Montillet et al. 2009). However, dual frequency allows on the fly ambiguity resolution. At the time of writing, Locata transmitter design allows for the transmission of two frequencies, each modulated with two spatially diverse PRN codes. This allows a better multipath mitigation (Rizos et al. 2011). Statistics on the Locata carrier phase signal are calculated on the delta time double difference of the carrier phase measurements (DTDDCP) as explained in
where \( \phi_{i} ( {\text{t)}} \) is the carrier phase measurement at epoch t from ith signal. In dual frequency, there are four signals available, allowing 6 double differences per LocataLite. Because of the biases in the carrier phase observables modeled as a second-order polynomial function (Montillet et al. 2009; Montillet 2008), the DTDDCP eliminates the clock bias and the geometrical distance in (1). However, the amount of reduction in clock bias and geometrical distance depends on the dynamics of the rover and the dynamics of the clock drift. This means that (2) is highly dependent on the data-recording rate. Therefore, spikes in the DTDDCP time series may not just be due to cycle slips, but also multipath contributes to the spikes (multiple rays bouncing back from the various scatterers in the vicinity of the rover). Thus, a DTDDCP residual looks like a constant in time with spikes with different amplitudes (Montillet et al. 2009; Khan et al. 2010a, b; Choudhury et al. 2010).
DTDDCP measurements and statistics
Figure 2 shows the DTDDCP of the Locata signals from the master transmitter (Tx1) in various experiments. Note that this transmitter is in LOS with the rover. The black dash lines are set to 0.3 cycles and −0.3 cycles following previous studies such as Montillet et al. (2009) and Khan et al. (2010a, b). The two first figures are measurements recorded using the firmware v2.4, whereas firmware v4.2 was used to record the measurements of the last two figures. One can see that multipath is reduced to one-third of the sigma, with sigma the standard deviation of the DTDDCP measurements recorded with firmware v2.4. Different improvements can explain this result. On the one hand, the dual frequency system offers more signals for the synchronization between the master LocataLite and the slaves compared with the single frequency firmware version (before v4.0). As the rover receives the signals from the transmitters, only when the slaves are synchronized within the LocataNet, any instability in the synchronization induces some cycle slip in the carrier phase measurements (Barnes et al. 2006; Montillet et al. 2009; Khan et al. 2010a, b). In addition, the fact that 4 signals are transmitted from each dual frequency, LocataLite allows a fine detection of the multipath (Rizos et al. 2011). Finally, noise rejection has been improved through the release of successive firmwares by modifying the adaptive gain control, but no precise details are available.

Delta time double difference of the Locata carrier phase measurements (in cycles) for the transmitter Tx1 with various experiments
Table 2 shows the statistics of the DTDDCP measurements as shown in Fig. 2 for the experiments described above. However, for each case study, a partial or total blockage of the line-of-sight (LOS) between one LocataLite transmitter and the rover occurred voluntarily (controlled environment). In the PARKING and LN1 experiments, the light obstruction is created by blocking the direct path with a few leaves, whereas the non-LOS case is induced with a few tree branches and foliage. In LN2, the bottom transmitter of the LocataLite 1 is obstructed with a paper sheet (light obstruction) or a thin (2 mm) metal plate (NLOS). Note that in both cases, there is approximately 30 cm between the obstruction item and the center of the transmitting antenna. All values are studied on 2,000 epochs, and the carrier phase measurements are recorded with a 2 Hz rate during the rover static tests. For each case study, the spikes are numbered if their heights (k) are bigger than 0.3 cycles. The last row displays the minimum and maximum (tail) values of the spikes of the double difference carrier phase measurements and standard deviation (σ). Looking at the DTDDCP time series in all the case studies between the cases where the transmitter and the rover are in LOS and the non-LOS (NLOS) case, one can see that the number of spikes above the threshold (in absolute value) increases in all of the 4 tests (PARKING, LN1, LN2-1, and LN2-2). For example, the number of peaks above the threshold (0.3 cycles) is 44 in LOS and 118 in NLOS for the PARKING experiments. This result underlines that carrier phase measurements are noisier (due to multipath) when the signal passes through foliage, or if a main scatterer is in the vicinity of the transmitter/receiver. According to the results in Table 2 and Fig. 2, one can see in the LOS case in the experiments LN2-1 and LN2-2 that the standard deviation of the double difference carrier phase measurements is approximately equal to a third of the ones with the firmware v2.4. The number of spikes of the delta time double difference of the carrier phase measurements when obstructing the LOS “slightly” is smaller than in the case of firmware v2.4.
Thus, we can see that the dual frequency system is showing a fast recovery of the cycle slips which makes the signal more robust to the obstruction of the LOS between the rover and the transmitters. In the NLOS case, the standard deviation of the DTDDCP is greater than in the other case studies for all the experiments, and in particular almost five times the standard deviation of the LOS case for LN2-1 and LN2-2 experiments. In addition, we can see that with the firmware v4.2, the standard deviation of the DTDDCP is approximately 0.1 cycles smaller than with firmware v2.4 (30 % improvement). This quantifies the effect of the multipath on the transmitted Locata signal. Figure 3 displays the delta time double difference of the Locata carrier phase measurements for the experiment LN2-2 when comparing the results for different case studies whether or not the LOS is blocked. As previously stated, the results are obtained when blocking the bottom antenna of LocataLite 1. The results confirm visually the description of the statistics given in Table 2 for the LN2-2 case study.

Delta time double difference of the Locata carrier phase measurements for the experiment LN2-2 (LOS, light obstruction, NLOS)
Improvement of the positioning accuracy
This section shows the performances of Locata in terms of the accuracy of the rover’s position through the various case studies. It ends with the noise model of the time series of the rover’s coordinates and the detection of Wi-Fi interferences.
Statistics on static Locata rover coordinates
From PARKING, LN-1, LN2-1, and LN2-2 case studies, we calculated the accuracy of the rover’s position postprocessed in meters for the error per coordinate (East, North, and Up) using the same 2,000 epochs as in the previous part. For each coordinate, the mean (μ), standard deviation (σ), correlation coefficient (r), and minimum/maximum of the error position are extracted (tail). The time series of the error is modeled using a Normal distribution. Figure 4 shows an example with the time series of the error on the East coordinate fitted with a Normal distribution in the case of LN2-2.

Histogram of the error (in mm) on the East coordinate for the experiment Locata network 2 (LN2 -2) modeled with a Normal distribution showing it with the clusters and no clusters
Table 3 displays the rover’s position accuracy in 3D for the three experiments. Note that the dilution of precision (DOP) values are estimated with the averaged position of the static Locata rover (over 2,000 epochs) (Misra and Enge 2001). The order of magnitude is of a few centimeters to the millimeter accuracy (i.e., 0.3 cm for the East coordinate of LN2-1). One can underline that the standard deviation (SD) for the two experiments with firmware v4.2 is small compared to the mean position accuracy for the three coordinates.
The same conclusions can be drawn when looking at the minimum and maximum of position error values (tail in Table 3). These results underline the improvements in the v4.2 firmware from v2.0 such as multipath processing and fast cycle slip recovery.
For each experiment, more than 5 LocataLites (10–16 Locata transmitters) were used in the trilateration of the rover’s position. The measurements recorded with a certain number of cycle slips are diluted with the measurements recorded from other transmitters (which are in LOS with the rover). It has also been emphasized in Montillet et al. (2009) that the rover may detect and discard transmitters in deep fading area. This makes more difficult to quantify directly the effect of the environments through the analysis of the statistics of rover’s position accuracy. Nevertheless, the low level of noise on the carrier phase measurements as seen in Section II also explains the good accuracy of the rover’s position in the experiments LN2-1 and LN2-2.
In our experiments, the HDOP and vertical dilution of precision (VDOP) values are sometimes large. This is an important factor to explain the accuracy of the rover’s position. For example, if the Locata transmitter on the roof is discarded in the PARKING experiment, the VDOP value rises up to 16.44 and the HDOP value to 2.16 which increase the mean error to −0.71 cm on the East coordinate and to 3.3 cm on the Up coordinate. The Normal distribution fits well the error on the East, North, and Up coordinates for all the experiments (correlation values (r) greater than 0.75). For example, r is equal to 0.84 for the East component in LN1 and 0.85 for LN2-1. Note that we can observe sometimes, when recording the experiments LN2-1 and LN2-2, an effect of “clusterization” in the distribution of the rover’s coordinates as shown in Fig. 4. This phenomenon is due to the small fluctuations in the coordinates from one epoch to another, which result from the low noise on the carrier phase measurements. The “clusterization” effect can be solved with careful attention to the rounding approximation of the error values of the rover’s position in the software used to process the data (i.e., MATLAB). It has also been observed that decreasing the recording rate of the rover’s coordinate can also help to avoid large clusters of rover’s coordinates.
Confidence ellipse and the influence of the geometry of the LocataNet on the estimated rover position
As previously mentioned in Sect. 3.1, the HDOP and VDOP are important parameters. Thus, the design of the Locata network is an important step to locate precisely the Locata rover. Moreover, we previously justified that the Normal distribution models well the distribution of the error on each coordinate. Let us define \( \Updelta {\text{E}} \) as the zero-mean distributed error on the East coordinate and \( \Updelta {\text{N}} \) the reciprocal error on the North coordinate. Thus, (\( \Updelta {\text{E}} \), \( \Updelta {\text{N}}\)) has a two-dimensional Normal distribution zero-mean distributed with covariance \( \Upsigma \) (Montillet 2008). Following the definition of (Misra and Enge 2001), \( \varphi \), the angle between the semi-major axis and the N axis in the ENU referential, is defined by
The symbols \( \sigma_{\text{E}}^{2} \) and \( \sigma_{\text{N}}^{2} \) denote the variance of the error on the East and North coordinates; and \( \sigma_{\text{EN}}^{2} \) is the variance of the uncorrelated measurements between East and North coordinates. According to (Massat and Rudnick 1990), the HDOP can be redefined such as
where \( \Upsigma \) is the 2-by-2 covariance matrix of the East and North coordinates (Misra and Enge 2001) defined as:
Inserting (4) into (3), the angle \( \varphi \) is redefined as:
Equation (6) shows that the semi-major axis of the confidence ellipse rotates in the direction of the E axis if \( \varphi \) is positive (i.e., \( \sigma_{\text{EN}}^{2} > 0 \) and \( \frac{{HDOP^{2} }}{{\sigma_{\text{N}}^{2} }} > 1 \)). Reciprocally, when \( \varphi \) is negative (i.e., \( \frac{{HDOP^{2} }}{{\sigma_{\text{N}}^{2} }} > 1 \) and \( \sigma_{\text{EN}}^{2} < 0 \)), the rotation is in the opposite direction. As an example, Fig. 5 shows the data (estimated positions with Locata technology) for the measurements recorded during one of the test environments (e.g., LN1 in Table 1) with the confidence ellipse for different values of \( \sigma_{\text{E}}^{2} \). In this case, \( \sigma_{\text{EN}}^{2} \) is negative and the ellipse rotates in the counterclockwise direction. The angle defined by (6) is equal to −0.013 radians (−6°). Note that \( \varphi \) varies in the interval [−\( \pi \)/4, \( \pi \)/4] by definition.

Confidence ellipse applied to the data recorded in the LN1 environment
Noise model and Wi-Fi interferences
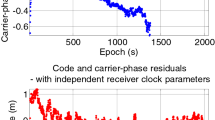
In the previous section, we demonstrated that the Normal probability density function (Gaussian) fits the distribution of the error for each coordinate of the Locata rover. We want to further investigate the noise distribution on each coordinate, because it was already pointed out that the Locata rover coordinates can be degraded from interferences between the Wi-Fi and Locata technology. Montillet et al. (2009); Khan et al. (2010a, b) show some jumps due to the interferences in the rover’s coordinate time series. An example of such interferences is shown in Fig. 7. Our approach looks at the autocorrelation of each zero-mean coordinate. In the case of zero-mean white Gaussian noise, the autocorrelation is expected to be a function with a peak at the first epoch and almost zero for the remaining epochs (Vaseghi 2000). The autocorrelation function of a signal \( s(t) \) is equal to:
Before applying the some data, let us investigate the autocorrelation function on simulated time series. From the model of the zero-mean Locata rover, we simulated three time series: with no interferences (white noise only), with small interferences, and higher interferences. Figure 6 shows the time series with small interferences (y1), larger ones (y2), and the autocorrelation function. Note that the simulations are based on the results shown in Montillet et al. (2009) and Khan et al. (2010a, b) with jumps due to Wi-Fi technology from a few millimeters to a couple of centimeters bouncing the time series up and down. To simulate the jumps, we have inserted a step function (two jumps of 3 mm height, lasting 100 and 150 samples, respectively) in a time series with a white Gaussian noise (5 mm SD). Moreover, there may be jumps due to the shift of the antenna phase center, a phenomenon known on several years long GPS coordinate time series (Misra and Enge 2001). According to the previous statistics on the rover’s coordinate time series (Table 3), these jumps should be hard to detect whether their amplitudes are less than 1 mm. However, this study is only interested to find large jumps which produce large biases in the analysis of the statistics of the rover’s coordinate time series and the autocorrelation time series. It is also important to underline that the average recording time of all the experiments in this work is less than 30 min (2,000 samples). This reduces the likelihood that our autocorrelation time series would be biased due to the antenna phase shift phenomenon. The results, displayed in Fig. 6, support the theory that the autocorrelation function is almost a zero-mean line, except the first epoch in the case with no interferences (no jumps), whereas the shape of the curve degrades when adding jumps with increasing amplitudes in the time series. Figure 7 shows the results when using experiments LN2-2 and another data set similar to LN1, but with interferences. This data set was recorded when the Wi-Fi access points were turned on as described in (Montillet et al. 2009). The autocorrelation results confirm that in the absence of interferences, the curve is similar to the one obtained for white Gaussian noise (red line in Fig. 7). In addition, the peak in the autocorrelation results (in red) corresponds to the variance of the signal y1(t), which is in this case equal to 5 mm2. Finally, the noise model on the Locata rover coordinate can be characterized as a white Gaussian noise.

Autocorrelation function with simulated time series of zero-mean Locata rover coordinate with no interferences (no jumps), and interferences (y1(t) and (y2(t))

Zero-mean East coordinate (in m) for two experiments with firmware v4.2 (y1(t)) and v2.0 (y2(t)), with corresponding autocorrelation results
Conclusions
We have investigated the noise on the carrier phase signal using two different firmwares (v2.4 and v4.2) based on various experiments setup around the University of Nottingham campus. The statistics show that the obstruction of the LOS between the LocataLite and the rover produces some cycle slips. However, the number is strongly reduced with the firmware v4.2 due to the advantage that with this firmware, the LocataLites are dual frequency (only single frequency in firmware v2.0). Thus, with more available signals, cycle slip can be more easily detected (and repaired) and so as the detection of multipath fading on the received signal.
The second section dealt with the statistics on the coordinates of a static Locata rover. We show that the Normal distribution models well the coordinates’ distribution for all experiments. Moreover, in the experiments, the rover position is accurate at the sub-centimeter level on the East, North, and Up coordinates with a standard deviation smaller with firmware v4.2 than v2.4 (up to 5 times smaller on the height coordinate). Note that we show the importance of the design of the LocataNet when decreasing the VDOP for the PARKING experiment.
In a separated section, we justified the influence of the geometry of the LocataNet on the rover’s position accuracy by mathematically justifying the influence of the VDOP and HDOP onto the confidence ellipse.
Finally, the autocorrelation of the zero-mean coordinate of the Locata rover is used to demonstrate that the noise model is a white Gaussian noise. Furthermore, in the presence of Wi-Fi interferences, the autocorrelation function differs from the white Gaussian noise. As such, it is possible to detect the presence of Wi-Fi interferences in the time series of Locata rover’s coordinates with the autocorrelation function. Note that in the experiment LN2, we have not noticed the interferences between Locata and Wi-Fi technologies as shown in experiment LN1, even though the setting of the LN2 experiment is nearby Wi-Fi access points.
To conclude, the analysis of the performances of Locata technology with firmware v4.2 shows some important improvements over firmware v2.0. Currently, the newest firmware version has just been released, v5.0, but no data were available to the authors. New features may improve further the accuracy of the static and kinematic rover’s position by fixing the ambiguities in the Locata signals. In addition, an extended Kalman filter would be used to smooth the rover’s coordinates.
References
Barnes JB, Rizos C, Kanli M, Small D, Voigt G, Gambale N, Lamance J, Numan T, Reid C (2004) Indoor industrial machine guidance using Locata: a pilot study at bluescope steel. In: Proceedings of ION GNSS-04, U.S. Institute of Navigation, Dayton (OH), pp. 533–540
Barnes JB, Rizos C, Kanli M, Pahwa M (2006) Locata: a new positioning technology for classically difficult GNSS environments. In: Proceedings of international global navigation satellite systems society (IGNSS symposium 2006)
Bartone C, Graas FV (2000) Ranging airport pseudolite for local area augmentation. IEEE Trans Aerosp Electron Syst 36(1):278–286. doi:10.1109/7.826330
Bonenberg LK, Hancock CM (2010) Tracking, testing (on the Edge). GPS World 21(11):50–51
Bonenberg LK, Roberts GW, Hancock CM (2011) Using Locata to augment GNSS in a kinematic urban environment. Arch Photogramm Cartogr Remote Sensing 22:63–74
Choudhury M, Harvey BR, Rizos C (2010) Mathematical models and a case study of the Locata deformation monitoring system (LDMS). In: Proceedings of XXIV FIG Int. Congress “Facing the Challenges—Building the Capacity”, Sydney, Australia, 11–16 April, pp. 1–14
Khan FA, Rizos C, Dempster AG (2010a) Locata performance evaluation in the presence of wide- and narrow-band interference. J Navig 63(3):527–543. doi:10.1017/S037346331000007X
Khan FA, Dempster AG, Rizos C (2010b) Hybrid schemes for carrier point positioning solution quality improvement. Navigation 57(3):231–247
Massat P, Rudnick K (1990) Geometric formulas for dilution of precision calculations, J Inst Navig 37(4):379–391, ISSN 0028-1522
Meng X, Meo M, Roberts GW, Dodson AH, Cosser E, Luliano E, Morris A (2003) Validating GPS based bridge deformation monitoring with finite element model. In: Proceedings of GNSS 2003, The European navigation conference, 22–25, April, Graz, Austria
Misra P, Enge P (2001) Global positioning system: signals, measurements, and performance, 1st edn, Ganga-Jamuna Press
Montillet J-P (2008) Precise positioning in Urban canyons: applied to the localisation of buried assets, Ph.D. dissertation, Institute of Engineering Surveying and Space Geodesy, The University of Nottingham
Montillet J-P, Meng X, Roberts GW, Taha A, Hancock C, Ogundipe O, Barnes J (2007) Achieving centimetre-level positioning accuracy in Urban Canyons with Locata technology. J Global Position Syst 6(2):158–165
Montillet J-P, Roberts GW, Hancock C, Meng X, Ogundipe O, Barnes J (2009) Deploying a Locata network to enable precise positioning in urban canyons. J Geodesy 83(2):91–103. doi:10.1007/s00190-008-0236-7
Pervan B, Cohen C, Lawrence D, Cobb HS, Powell J, Parkinson BW (1998) Autonomous integrity monitoring for GPS-based precision landing using ground-based integrity Beacon pseudolites. In: Proceedings of ION GPS-94, U.S. Institute of Navigation, Salt Lake City, Utah, pp. 609–618
Peters GO (2011) Advantages of combining GNSS with ground based pseudo-satellites, Master dissertation, Department of Civil Engineering, The University of Nottingham
Rizos C, Li Y, Politi N, Barnes J, Gambale N (2011) Locata: a new constellation for high accuracy outdoor and indoor positioning proc. FIG Symposium, Marrakech (Morocco)
Roberts GW, Montillet J-P, de Ligt H, Hancock C, Ogundipe O, Meng X (2007) The Nottingham Locatalite Network. In: Proceedings of the international global navigation satellite systems society (IGNSS) symposium 2007, The University of New South Wales, Sydney, Australia, 4–6 December, CD-ROM procs
Vaseghi SV (2000) Advanced digital signal processing and noise reduction, 2nd edn. Wiley, London
Acknowledgments
The authors thank the UK Government’s Technology Strategy Board, which funded part of this research and the Australian Research Council (DP0877381). In addition, they also acknowledge the comments from LOCATA Corp. (in particular Dr. Joel Barnes) and the anonymous reviewers when preparing this manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Montillet, JP., Bonenberg, L.K., Hancock, C.M. et al. On the improvements of the single point positioning accuracy with Locata technology. GPS Solut 18, 273–282 (2014). https://doi.org/10.1007/s10291-013-0328-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-013-0328-6