
Abstract
We present an assessment of a GPS receiver operational network to produce accurate integrated precipitable water vapour (IPWV) during a two-week field experiment carried out in Central Italy around the city of Rome, where different instruments were operative. This experimental activity provided an excellent opportunity to compare the GPS products with independent measurements provided by ground-based and space-based sensors and to evaluate their quality in terms of absolute accuracy of IPWV, analyzing also the spatial scale of GPS estimates. For instance, the assimilation into Numerical Weather Prediction models of IPWV provided by a GPS network or its exploitation in space geodesy applications to correct tropospheric effects requires an accuracy in the order of 0.1 cm to be ascribed to IPWV observations. In this work, we assessed that the accuracy for GPS IPWV estimates is 0.07 cm. Moreover, this experiment has pointed out strengths and limitations of an operational network for the water vapor estimation, such as a proper receiver distribution to achieve the desired spatial resolution and a coverage of GPS stations in both flat and mountains regions.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Water vapor is one of the most variable atmospheric constituents, fundamental in the transfer of energy in the atmosphere. Water vapor continually cycles through evaporation and condensation, transporting heat energy around the earth and between the surface and the atmosphere, contributing to the greenhouse effect (Harries 1997). Improving knowledge of the water vapor field is needed for many atmospheric applications and for microwave propagation studies, and the knowledge of its distribution is fundamental to set good initial conditions in numerical weather forecast (Kuo et al. 1993; Nakamura et al. 2004).
In addition, water vapor fluctuations are a major error source in ranging measurements through the earth’s atmosphere and therefore the principal limiting factor in space geodesy applications such as Global Positioning System (GPS) (Solheim et al. 1999), very long baseline interferometry (Treuhaft and Lanyi 1987), satellite altimetry (Desportes et al. 2007), and interferometric synthetic aperture radar (InSAR) (Hanssen 2001; Li et al. 2006; Onn and Zebker 2006; Rocca 2007). In fact, the high spatial and temporal variability of water vapor is the principal factor introducing an unknown path delay in the electromagnetic signal and phase shift.
Several techniques are well established to derive the vertically integrated precipitable water vapor (IPWV), in particular using ground-based microwave radiometers (MWRs), radiosonde observations (RAOBs), and network of GPS receivers (Westwater 1993; Basili et al. 2001; Basili et al. 2006; Memmo et al. 2005). Water vapor can be also measured from space (Bonafoni et al. 2011), thanks to its influence on atmospheric emission and absorption in the infrared and microwave spectral ranges at specific resonant frequencies.
GPS ground receivers can provide valuable information on water vapor, considering that a fairly dense network is available in many part of the world, providing a quite cheap and reliable source of information. Many investigations have been carried out in this respect devoted to developing processing techniques (Bevis et al. 1994; Wolfe and Gutman 2000; Morland and Matzler 2007; de Haan et al. 2009; Ortiz de Galisteo et al. 2010), to validate the results through comparison with independent sources (Basili et al. 2001), and to exploit the final product. For instance, zenith total delay (ZTD) or IPWV data from a GPS ground-based network can be assimilated into numerical weather prediction (NWP) models (Pacione et al. 2001). They can be also integrated with additional sources of IPWV to produce two-dimensional fields throughout statistical interpolation techniques (Basili et al. 2004).
The generation of a reliable IPWV product from a GPS network requires, however, to properly process the raw data and to acquire ancillary information on the atmosphere. The resulting product must be carefully characterized in order to be used. For instance, the assimilation into NWP models of ZTD or directly of IPWV observed by a GPS network requires an accurate characterization of the error to be ascribed to those observations (Faccani and Ferretti 2005; Ferretti and Faccani 2005). Exploiting the GPS data into statistical interpolation or spatial downscaling techniques require knowing not only the error but also the characteristic spatial scale to which the GPS IPWV data are provided, or in other words the horizontal resolution to be associated with the final GPS map.
In this respect, the European Space Agency (ESA) funded a project aiming to investigate the possibility to acquire information on integrated water vapor and related electromagnetic path delay with accuracy and resolution (both spatial and temporal) suitable to correct the errors in spaceborne synthetic aperture radar (SAR) interferograms. The project (Mitigation of Electromagnetic Transmission errors induced by Atmospheric Water Vapor Effects: METAWAVE) aimed to develop InSAR corrections for tropospheric effects at local and regional scale. This was a very challenging task considering that the interferometry from SAR has spatial resolution in the order of few tens of meters and accuracy in range variation in the order of centimeters or even millimeters using multipass techniques.
We present the work carried as part of the METAWAVE project to asses a GPS receiver operational network to produce accurate IPWV information. The METAWAVE project has represented an excellent test bed to optimize the strategies to process the GPS raw data and to acquire all the necessary ancillary information, pointing out the limitations of an operational network and suggesting possible strategies to overcome these limitations. For example, the distribution of GPS stations from flat to mountainous areas or the effects induced by their finite mutual distance are aspects to be taken into account.
Specifically, an experimental activity was performed in the area of Rome consisting of the acquisition of data from different ground-based and spaceborne sensors. Such an experiment provided an opportunity to compare the GPS products with independent data sets and to characterize their quality and usability in terms not only of absolute accuracy of IPWV but also of horizontal spatial scale. The absolute accuracy was assessed by comparisons at a specific GPS station with respect to radio soundings and a collocated ground-based microwave radiometer. Also, the quality of some Earth Observation (EO) products was investigated using the IPWV values retrieved from the GPS network. Then, the spatial scale of the GPS derived products was compared to other systems by using the semivariogram statistical tool.
The description of the GPS network and data processing is presented in Sect. “GPS network description and data processing”. Comparisons of GPS IPWV with different ground-based and satellite-based cases are discussed in Sect. “Validation of IPWV”. Section “Water vapor spatial characterization” describes the water vapor spatial characterization obtained from the GPS network, also compares it with other source of information from satellite data. Conclusions are given in Sect. “Conclusions”.
GPS network description and data processing
In the context of the METAWAVE project, a water vapor intensive observation period (WVIOP) field experiment was carried out in Central Italy around the city of Rome (20 September–3 October, 2008), where different instruments were operative (Cimini et al. 2012). In particular, a local RESNAP (REte Sperimentale regionale di stazioni permanenti GPS per la NAvigazione e il Posizionamento)-GPS network of 11 stations managed by the Sapienza University of Rome was considered, as shown in Fig. 1. This experimental activity was an excellent chance to evaluate the accuracy and the spatial characteristics of IPWV retrieved from the GPS receivers performing comparisons with independent measurements provided by ground- and space-based sensors.

Experimental setup during the METAWAVE WVIOP in September–October 2008. Red triangles are the IGS stations used as reference. The black zoom box shows the location of the RESNAP permanent stations (green triangles), and the red box (lat 41.3–42.5 N; lon 11.6–13.2 E) contains the stations exploited in the METAWAVE project
The use of ground-based GPS receivers for IPWV estimation is a well-established technique (Bevis et al. 1994; Rocken et al. 1995; Wolfe and Gutman 2000; Basili et al. 2001). It is based on measurements of the tropospheric delay affecting the GPS signals during their propagation from the GPS satellites to the receivers on ground. We will refer to the zenith total delay (ZTD) that is the excess path length due to the signal travel through the troposphere at zenith. The dispersive ionospheric effect is removed by a linear combination of dual frequency data (Klobuchar and Kunches 2001).
In order to estimate ZTD from the GPS receivers, the Bernese software package (Beutler et al. 2007) was sed. In particular, 14 independent daily sessions were processed from September 20 to October 3, 2008, using data from 22 stations, that is, 11 stations of the experimental local RESNAP-GPS network and 11 IGS stations, as shown in Fig. 1. The network adjustment was carried out in the IGS05 reference frame. IGS station coordinates were estimated by linear interpolation of the weekly estimated coordinates in the proceeding 52 weeks and distributed by IGS in sinex format. Stochastic constraints were applied on IGS station coordinates with realistic variances of 2 mm for horizontal components and 4 mm for the height component. The use of IGS stations, hundreds of kilometers away from the experimental area, prevented also problems of high tropospheric parameter correlation for small network sites.
Then, the temporal resolution of ZTD products required for a useful network employment in the WVIOP experiment was investigated. Concerning the site-specific troposphere parameters, in standard geodetic applications, a time resolution of 1 or 2 h is considered reasonable (Beutler et al. 2007). In order to compare the GPS measurements with other sensor data with shorter parameter time interval, such as in the WVIOP experiment, a better sampling was attempted; namely two ZTD estimations were carried out with an interval of 15 and 30 min, respectively. Shorter intervals were not taken into account to avoid estimating variations of the tropospheric parameters over intervals of a few minutes in length which would not be significant for the estimation of the formal root mean square (RMS) of the parameter themselves.
Water vapor retrieval from ZTD
The retrieval algorithm to estimate IPWV from the zenith total delay is based on the decomposition of ZTD into two components: the zenith hydrostatic delay (ZHD) that is mainly dependent on the dry air gasses in the atmosphere and accounts for approximately 90 % of the delay, and the zenith wet delay (ZWD) that depends entirely on the moisture content of the atmosphere.
Therefore, the ZWD is given by:
Applying the well-known Saastamoinen model (Saastamoinen 1972) to accurate surface pressure measurements, we can predict the ZHD with high accuracy and compute the ZWD using (1). Then, it is possible to convert the ZWD values into IPWV ones by using the following relationship:
where factor П is dependent upon various physical constants and on the weighted mean temperature of the atmosphere (Davis et al. 1985; Askne and Nordius 1987). The transformation of ZWD into IPWV assumes that the wet path delay is entirely due to water vapor and that liquid water and ice do not contribute significantly to it (Duan et al. 1996). In our study, we have estimated the factor П by a regression analysis using more than 6000 samples of ZWD and IPWV analysis data from the European Centre of Meteorological Weather Forecasting (ECMWF) around the area of Rome during September and October 2008, with such an accuracy that an error less than 1 % is introduced during the computation of IPWV.
Concerning the prediction of ZHD with Saastamoinen model, we have collected the air pressures corresponding in time and space to the ZTD data set of the GPS network from the closest meteorological stations available in www.wunderground.com. When a height difference between the meteorological station and the GPS one is present, station pressure was interpolated to the GPS station height using the hydrostatic relationship (Wallace and Hobbs 1977) depending on the pressure at the sea level and on the surface temperature provided by the selected meteorological stations.
Validation of IPWV
A first assessment of IPWV estimates during the WVIOP was obtained at the site of Rome from the ground-based microwave radiometer (MWR) located at the Department of Information Engineering of the SAPienza university of Rome (DIESAP) and from the M0SE GPS permanent station located in near proximity to the MWR (Cimini et al. 2012). Conventional surface meteorological instruments were co-located with the microwave radiometer.
The radiometer is a portable dual-channel type, model WVR-1100, manufactured by the Radiometrics Incorporated, Boulder, CO. The MWR operates at 23.8 GHz, near the weak vapor resonant line, and at 31.4 GHz, within the almost transparent window region where transmission is controlled by liquid water. IPWV and liquid water content can be retrieved from observations at these two frequencies (Westwater, 1993). A specific calibration was applied to the data collected during the experiment, in line with the calibration methods suggested by Han and Westwater (2000) and by Liljegren (2000).
A third-order polynomial regression algorithm was specifically developed to estimate IPWV from observed brightness temperatures TBS. The inversion algorithm was developed by using a database of simulated downward TBS computed from a large set of radiosoundings (5980 from years 2002 to 2008) collected at the RAOB station of Pratica di Mare, near Rome. Moreover, IPWV values at different times were computed from water vapor profiles measured by RAOB launched from DIESAP. During the 2-week WVIOP, the time resolutions for the IPWV data are 4 min for MWR, 30 min for GPS, while six radiosondes were launched from DIESAP at times of Envisat satellite overpasses of interest for the METAWAVE project. MWR data during rainy conditions were discarded, since the radiometer measurements are not reliable.
In Fig. 2, scatter plots of collocated and nearly simultaneous IPWV from the different sources are shown, together with the main statistics. The top of Fig. 2 shows the comparison of MWR and GPS IPWV estimates against values obtained from radiosondes, adopting these last ones as the standard reference for IPWV. MWR and GPS data were averaged within 1-h windows centered at radiosonde launch times, thus using about 15 data points for MWR and 2 for GPS per each radiosonde IPWV value. With respect to RAOB, MWR, and GPS show a Root Mean Square difference (RMS) of 0.10 and 0.16 cm, respectively, and this difference is mainly driven by the higher IPWV values. Note that these RMS differences inherently include the uncertainties associated with radiosondes, whose nominal value is about 5 %, that is, from 0.05 to 0.13 cm in the range under consideration. The bottom of Fig. 2 shows the comparison of IPWV obtained from GPS and MWR, revealing an RMS of 0.10 cm. Assuming comparable accuracy for MWR and GPS, we can conclude that the accuracy for GPS IPWV estimates is 0.07 cm.

Scatter plots of IPWV from different sources. Number of elements (N), average difference (AVG), standard deviation (STD), root-mean-square difference (RMS), correlation coefficient (COR), slope (SLP), and offset (INT) of a linear fit are included in the color-coded text. N, SLP, and COR are dimensionless, while AVG, STD, RMS, and INT are in cm. Top: MWR (blue dots) and GPS (red x) are compared against RAOB, taken as reference. Bottom: GPS is compared against MWR, taken as reference
As a second step in the water vapor content validation, IPWV maps from satellite observations at low (5 km), medium (1 km), and high resolution (0.3 km) have been compared and validated against IPWV estimated by the GPS network in the red box of Fig. 1. We now assume the IPWV estimation from the GPS network as the reference ground-truth; therefore, shifting the aim to evaluating IPWV estimates from satellite sensors. The sources of IPWV maps are summarized in the following:
-
MODIS: Observations from the moderate-resolution imaging spectroradiometer (MODIS) onboard the NASA TERRA satellite are used to estimate IPWV maps. Two independent IPWV products are available from MODIS Level 2 data, one relying on observations at thermal infrared (IR), and the other on near infrared (NIR) channels (Gao and Kaufman 2003). The horizontal resolution is 5 km for the MODIS IPWV product from IR, while 1 km for MODIS IPWV product from NIR (http://modis.gsfc.nasa.gov/index.php).
-
MERIS: IPWV maps are estimated from medium-resolution imaging spectrometer (MERIS) observations at NIR channels (Fischer and Bennartz 1997), using Level 2 products. The horizontal resolution is 0.3 km (http://envisat.esa.int/handbooks/meris/).
A statistical comparison of IPWV from the satellite sources introduced above against IPWV estimated by the GPS network is shown in Fig. 3. For each satellite passage over the red box of Fig. 1, we considered the satellite clear-sky pixels including the GPS receiver locations. The temporal collocation is achieved selecting GPS data within the 30-min window including the time of satellite overpass. From Fig. 3, the MERIS IPWV product shows the highest correlation and the best accuracy, with RMS of 0.1 cm. Note that the MODIS IR product has a much coarser resolution than MERIS, and thus, part of the larger RMS is attributable to the variance of the IPWV field within a 5 × 5 km box. On the other hand, the MODIS NIR product should show RMS in between values for MODIS IR and MERIS, while it exceeds significantly both of them. Therefore, in accordance with other investigators (Serpolla et al. 2009), this analysis shows that the MODIS NIR product should not be preferred for applications requiring high accuracy. Conversely, assuming comparable accuracy for MERIS and GPS, the analysis shows that the accuracy for MERIS IPWV estimates is 0.07 cm. In conclusion, this analysis showed the ability of GPS network to be used as a reference for investigating the quality of EO IPWV estimates.

Scatter plots of IPWV from MODIS IR (red), MODIS NIR (cyan), and MERIS NIR (magenta) at their original horizontal resolution against IPWV from the GPS network. The statistics N, AVG, STD, SLP, INT, RMS, and COR are as in Fig. 2
Water vapor spatial characterization
As pointed out previously, the WVIOP experimental activity allowed the comparison of GPS products with independent measurements to assess the absolute accuracy of IPWV, but also provided an opportunity to analyze the spatial scale of the available GPS IPWV data. For instance, applications devoted to exploit GPS network data into statistical interpolation or spatial downscaling techniques require knowing not only the error but also the horizontal resolution associated with the field to be interpolated. This experimental campaign highlighted usefulness and limitations of an operational network: for example limitations due to the spatial distribution of GPS stations on the investigated area or the effects of their mutual distance.
The use of GPS networks for remote sensing applications that involve spatial studies of IPWV can be dealt with in terms of two main aspects: the water vapor trend, that is, the deterministic component, as a function of the terrain height (h) and its spatial correlation through the analysis of the residual stochastic component. These aspects are essential to characterize the delay induced by IPWV to the GPS signal.
This section discusses both the modeling efforts for the deterministic and stochastic part of the wet component of the tropospheric delay, and the results achieved from the data collected during the experimental campaign of the METAWAVE project. Spatial scale features obtained from the available GPS network are then compared with other sources of information from satellite data.
Theoretical aspects
To characterize the spatial correlation of IPWV and to assess the ability of a GPS network to correctly reproduce such characteristics we use variograms. They potentially allows to directly include the spatial correlation information into an interpolation algorithm. Under the hypothesis of second order spatial stationarity, the semivariogram is defined as follows (Wackernagel 1998),
where \( \gamma_{V} \) indicates the semivariogram of integrated precipitable water vapor, V identifies each available source of water vapor information (cm) and l (km) is the lag distance vector between two points at position r and r + l, whereas the symbolism 〈·〉 stands for the average operator in the spatial domain. To avoid to misrepresent the spatial features of water vapor and to obey to the stationarity hypothesis as much as possible, the trend of IPWV (namely \( \bar{V} \)), that is the non-stationary component of the field which is a function of the terrain height, has been removed from each source of data at each instant. This leads to the de-trended integrated precipitable water vapor, indicated by the “wave” symbol over V.
It is worth noting as the spatial average operator in Eq. (3) plays a crucial role in the interpretation of the resulting variograms. Due to the high variability of the square difference in Eq. (3), an average of samples into given spatial lag intervals should be done. Following what suggested in Trauth (2006), Eq. (3) is practically implemented as follows:
where \( N(\Updelta l_{n} ) \) is the number of pairs \( \tilde{V}({\mathbf{r}}) \)and \( \tilde{V}({\mathbf{r + l}}) \)within the lag interval Δl n, Δl n = [l n − Δl/2, l n + Δl/2] and l n = Δl(n − 0.5) with the integer n∈ [1, N t ]; Δl and N t are the spatial lag interval fixed a priori and the total number of points in the variogram, respectively.
To characterize the deterministic component \( \bar{V} \), the spatial distribution of the GPS stations should guarantee an adequate coverage of the target area spanning from flat to mountainous areas. Thus, \( \bar{V} \) can be modeled with a decreasing exponential function of the terrain height (h) as done Basili et al. (2004) and Morland and Matzler (2007), and reported here for convenience:
In (5), the regression parameters k 0 and k 1 usually depend from geographical location and season.
Discussion of the results
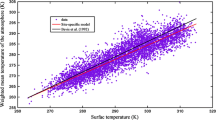
In the case of the field campaign carried out in the Rome area, the available GPS stations were positioned at heights from about 100 m to 1 km. This allowed us to calculate the IPWV against the height for several case studies as shown by Fig. 4 in blue circles. In this figure, the IPWV trend derived from MERIS satellite estimations under clear-sky conditions and for pixels including the available GPS receiver locations is shown by red diamonds. Superimposed to the IPWV estimations, an exponential model as in (5) is applied to MERIS and GPS IPWV estimates, shown in by the dotted red and shaded blue lines, respectively. The regression coefficients k 0 and k 1 in (5) are listed on the top of each panel for completeness. Even though a different measurement principle and estimation procedure is applied to derive the IPWV estimates from GPS and MERIS, a good agreement between the two trends can be noted. It is also important to note that the decreasing trend of IPWV against h can considerably vary in time. Thus, given the potential high temporal resolution of GPS estimates of IPWV as opposed to MERIS acquisitions, with overpass repetition of the order of 12 h, a well-distributed GPS network can be very useful to characterize the variations of the IPWV not only with respect to terrain height but also in time.

Dependence of IPWV from GPS (blue circles) and MERIS (red diamonds) as a function of the terrain height within the target domain (DEM panel). The coefficients k 0 (cm) and k 1 (m−1) above each panel indicate the intercept and slope rate of the exponential function, respectively
After running (4) under the spatial isotropy hypothesis, Fig. 5 shows the result of the variogram analysis, where information from different satellite sensors are included MERIS (5 acquisitions during September–October 2008) and SAR acquisitions from the Advanced SAR (ASAR) in two sub-domains D1 and D2 covering partially the red box of Fig. 1 (40 and 26 acquisitions from 2002 to 2008 in the domains D1 and D2, respectively) and from the RadarSat (54 acquisitions from 2003 to 2007). From each satellite sensor, the IPWV field over land has been made available either as a delivered Level 2 product, such as MERIS, or processing SAR data using proper retrieval algorithms. In particular, the sequence of InSAR acquisitions was processed using the permanent scatterer technique by the Polytechnic University of Milan (Ferretti et al. 2001). For the GPS receivers, we considered data collected from September 20 to October 4 for a total of 673 instants. In Fig. 5, for each source of information, we computed the spatial variogram (4) at each instant of time and then we averaged over the available measurement instants. The lag interval Δl and the total number of points in the variogram N t have been chosen, respectively, equal to 0.25 km and 161 for the SAR information, 2.5 km and 32 for MERIS and equal to 5 km and 7 for GPS measurements. Since no rules exist for the choice of Δl, the values above reasonably reflect the spatial distance of the water vapor points for each source of information. Also, the minimum lag distance for each variogram curve shown in the figure depends by the minimum distance of the available measurement point positions.

Characterization of the spatial correlation of IPWV for the red box of Fig. 1 (land area): variograms from different data source as indicated in the nested legend
As it can be seen from Fig. 5, the GPS seems to agree quite well with SAR IPWV retrievals, even though the SAR variograms span from low to higher spatial scales, as opposed to GPS ones that can describe features only at large scales. It is interesting to note as MERIS variogram overhangs the other curves, especially at scales up to 20 km. The discrepancy between the semivariogram of MERIS and GPS or InSAR could be ascribed to the different domain widths and to the different instants of measurement acquisition, where a dissimilar variability of water vapor was observed.
To quantify the degree of correlation of each source of information, we adopted an exponential model and we fitted it to each variogram of Fig. 5. The exponential model is of the type: y V = a[1 − exp(l/b)]. The parameter b gives an indication of the correlation distance of the variable V, while a is the V variance. The values obtained for b (km) are 2.9, 2.4, 2.8, 7.6, and 657 for ASAR D1, RSAT, ASAR D2, MERIS, and GPS, respectively. The unrealistic value for GPS is due to the fact that the exponential model is not able to correctly describe the spatial features of GPS variations. When the variogram does not show the characteristic saturation at larger scales, it is only possible to infer that the correlation distance exceeds the maximum lag distance in the data.
Overall, this analysis points out as the considered GPS network shows limitations in describing the spatial features of IPWV at small scales. It is evident from Fig. 5 that satellite sensors, due to their higher spatial resolution (0.3 and 0.1 km for MERIS and SAR, respectively), are able to resolve more details of IPWV features. In fact, their variograms in Fig. 5 cover spatial scales from meters to dozens of km with respect to the GPS variogram covering spatial lags from about 15–40 km. This intrinsic limitation of the GPS network could be partially overcome by properly distributing the GPS stations and crowding them in some prescribed regions. In pursuing this approach, flat and mountains regions have to be adequately sampled to be able to calculate both the deterministic and stochastic part of IPWV with sufficient accuracy. However, the upper limit for the GPS station density achievable in a given area is restricted by the field of view of each GPS station which tends to limit the useful mutual minimum distance among stations, usually in the order of a few kilometers.
At a glance, Fig. 5 highlights that large scale variations can be easily described by a GPS network but small spatial scale features are difficult to assess using the GPS information alone. Additional information like that retrieved from satellites can play a role in describing small scale IPWV variations even though the consistency of the water vapor estimates from different sensors has to be carefully evaluated. However, the good agreement between the GPS and satellite sensor variograms through different spatial scales is a promising result for future data integration purposes.
Conclusions
The assessment of a GPS receiver operational network to produce accurate and useful IPWV information during a field experiment was performed in two ways. First, comparing the GPS products at a specific station with independent measurements provided by a ground-based microwave radiometer and radiosoundings, showing an accuracy of GPS IPWV of 0.07 cm, then analyzing the spatial scale of GPS estimates. Also, the IPWV values retrieved from the GPS network were used to investigate the quality of Earth Observation products.
Therefore, the experimental campaign highlighted usefulness and limitations of the operational network, suggesting possible strategies to improve the benefits of the GPS products in data integration techniques. For instance, a proper receiver distribution to achieve the desired spatial resolution should be recommended, together with coverage of GPS stations in both flat and mountains regions.
References
Askne J, Nordius H (1987) Estimation of tropospheric delay for microwaves from surface weather data. Radio Sci 22:379–386
Basili P, Bonafoni S, Ferrara R, Ciotti P, Fionda E, Ambrosini R (2001) Atmospheric water vapour retrieval by means of both a GPS network and a microwave radiometer during an experimental campaign at Cagliari (Italy) in 1999. IEEE Trans Geosci Remote Sens 39(11):2436–2443
Basili P, Bonafoni S, Mattioli V, Ciotti P, Pierdicca N (2004) Mapping the atmospheric water vapor by integrating microwave radiometer and GPS measurements. IEEE Trans Geosci Remote Sens 42(8):1657–1665
Basili P, Bonafoni S, Mattioli V, Ciotti P, Westwater ER, Fionda E (2006) Experimental campaigns for IPWV estimates in the atmosphere: comparisons between dual-channel microwave radiometers, global positioning systems and radiosondes. Riv Ital Telerilev 35:35–44
Beutler G, Bock H, Dach R, Fridez P, Gäde A, Hugentobler U, Jäggi A, Meindl M, Mervart L, Prange L, Schaer S, Springer T, Urschl C, Walser P (2007) Bernese GPS Software Version 5.0. In: Dach R, Hugentobler U, Fridez P, Meindl M (ed). Astronomical Institute, University of Bern, Bern
Bevis M, Businger S, Chiswell S, Herring TA, Anthes RA, Rocken C, Ware RH (1994) GPS meteorology: mapping zenith wet delays onto precipitable water. J Appl Meteorol 33:379–386
Bonafoni S, Mattioli V, Basili P, Ciotti P, Pierdicca N (2011) Satellite-based retrieval of Precipitable Water Vapor over land by using a neural-network approach. IEEE Trans Geosci Remote Sens 49(9):3236–3248
Cimini D, Pierdicca N, Pichelli E, Ferretti R, Mattioli V, Bonafoni S, Montopoli M, Peressin D (2012) On the accuracy of integrated water vapor estimates and the potential for mitigating electromagnetic path delay error in InSAR. Atmos Meas Tech 5:1015–1030. http://www.atmos-meas-tech.net/5/1015/2012/
Davis JL, Herring LTA, Shapiro II, Rogers AE, Elgered G (1985) Geodesy by radio interferometry: effects of atmospheric modelling errors on estimates of baseline length. Radio Sci 20:1593–1607
de Haan S, Holleman I, Holtslag AAM (2009) Real-Time water vapor maps from a GPS surface network: construction, validation, and applications. J Appl Meteorol Climatol 48(7):1302–1316
Desportes C, Obligis E, Eymard L (2007) On the wet tropospheric correction for altimetry in coastal regions. IEEE Trans Geosci Remote Sens 45(7):2139–2149
Duan J, Bevis M, Fang P, Bock Y, Chiswell S, Businger S, Rocken C, Solheim F, van Hove T, Ware R, McClusky S, Herring TA, King RW (1996) GPS meteorology: direct estimation of the absolute value of precipitable water. J Appl Meteorol 35:830–838
Faccani C, Ferretti R (2005) Data assimilation of high density observations: Part I. Impact on the initial conditions for the MAP/SOP IOP 2b. Q J R Meteorol Soc 131A:21–42
Ferretti R, Faccani C (2005) Data assimilation of high density observations: Part II. Impact on the forecast of the precipitation for the MAP/SOP IOP2b. Q J R Meteorol Soc 131A:43–62
Ferretti A, Prati C, Rocca F (2001) Permanent scatterers in SAR interferometry. IEEE Trans Geosci Remote Sens 39(1):8–20
Fischer J, Bennartz R (1997) Retrieval of total water vapor content from MERIS measurements. ESA reference number PO-TN-MEL-GS-005, ESA-ESTEC, Noordwijk, Netherlands
Gao BC, Kaufman Y (2003) Water vapor retrievals using Moderate Resolution Imaging Spectroradiometer (MODIS) near-infrared channels. J Geophys Res 108. doi:10.1029/2002JD003023
Han Y, Westwater ER (2000) Analysis and improvement of tipping calibration for ground-based microwave radiometers. IEEE Trans Geosci Remote Sens 38(3):1260–1276
Hanssen RF (2001) Radar interferometry: data interpretation and error analysis. Springer, New York
Harries JE (1997) Atmospheric radiation and atmospheric humidity. Q J Royal Meteorol Soc 123(544):2173–2186
Klobuchar JA, Kunches JM (2001) Eye on the ionosphere: correction methods for GPS ionospheric range delay. GPS Solut 5(2):91–92
Kuo YH, Guo YR, Westwater ER (1993) Assimilation of precipitable water measurement into a mesoscale numerical model. Mon Weather Rev 121:1215–1238
Li Z, Muller JP, Cross P, Albert P, Fisher J, Bennartz R (2006) Assessment of the potential of MERIS near-infrared water vapor products to correct ASAR interferometric measurements. Int J Remote Sens 27(2):349–365
Liljegren JC (2000) Automatic self-calibration of ARM microwave radiometers. In: Pampaloni P, Paloscia S (eds) Microwave radiometry and remote sensing of the earth’s surface and atmosphere. VSP Press, Utrecht, pp 433–443
Memmo A, Fionda E, Paolucci T, Cimini D, Ferretti R, Bonafoni S, Ciotti P (2005) Comparison of MM5 integrated water vapor with microwave radiometer, GPS, and radiosonde measurements. IEEE Trans Geosci Remote Sens 43(5):1050–1058
Morland J, Matzler C (2007) Spatial interpolation of GPS integrated water vapor measurements made in the Swiss Alps. Meteorol Appl 14(1):15–26
Nakamura H, Koizumi K, Mannoji N (2004) Data assimilation of GPS precipitable water vapor into the JMA mesoscale numerical weather prediction model and its impact on rainfall forecast. J Meteorol Soc Japan 82(1B):441–452
Onn F, Zebker H (2006) Correction for interferometric synthetic aperture radar atmospheric phase artifacts using time series of zenith wet delay observations from a GPS network. J Geophys Res 111(B09102). doi:10.1029/2005JB004012
Ortiz de Galisteo JP, Toledano C, Cachorro V, Torres B (2010) Improvement in PWV estimation from GPS due to the absolute calibration of antenna phase center variations. GPS Solut 14:389–395
Pacione R, Sciarretta C, Vespe F, Faccani C, Ferretti R (2001) GPS PW assimilation into MM5 with the nudging technique. Phys Chem Earth A 26:481–485
Rocca F (2007) Modeling interferogram stacks. IEEE Trans Geosci Remote Sens 45(10):3289–3299
Rocken C, Van Hove T, Johnson J, Solheim F, Ware RH, Bevis M, Chiswell S, Businger S (1995) GPS/STORM-GPS sensing of atmospheric water vapor for meteorology. J Atmos Ocean Technol 2(3):468–478
Saastamoinen J (1972) Atmospheric correction for the troposphere and stratosphere in radio ranging of satellites. In: Henriksen SW et al. (ed), The use of artificial satellites for geodesy (15), geophysics monograph series, AGU, Washington, DC
Serpolla A, Bonafoni S, Biondi R, Arinò O, Basili P (2009) Validation of near infrared satellite based algorithms to retrieve atmospheric water vapour content over land. Italian J Remote Sens 41(1):37–44
Solheim FS, Vivekanandan J, Ware RH, Rocken C (1999) Propagation delays induced in GPS signals by dry air, water vapor, hydrometeors, and other particulates. J Geophys Res 104(D8):9663–9670
Trauth MH (2006) MATLAB® Recipes for Earth Sciences. Springer, Heidelberg
Treuhaft RN, Lanyi GE (1987) The effect of dynamic wet troposphere on radio interferometric measurements. Radio Sci 22(22):251–265
Wackernagel H (1998) Multivariate geostatistics, 2nd edn. Springer, Berlin
Wallace JM, Hobbs PV (1977) Atmospheric Science: an Introductory Survey. Academic Press, New York
Westwater ER (1993) Ground-based microwave remote sensing of meteorological variables. In: Janssen MA (ed) Atmospheric remote sensing by microwave radiometry. Chap 4. Wiley, New York, pp 145–213
Wolfe DE, Gutman SI (2000) Developing an operational, surface-based, GPS, water vapor observing system for NOAA: network design and results. J Atmos Ocean Technol 17(4):426–440
Acknowledgments
This work has been carried out as part of the METAWAVE project funded by ESA/ESTEC under contract N. 21207/07/NL/HE. The author would like to thank the project team for the useful discussions and suggestions and in particular Prof. Fabio Rocca, who shared the scientific responsibility of the project, and Dr. Björn Rommen who managed the project for ESA.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Bonafoni, S., Mazzoni, A., Cimini, D. et al. Assessment of water vapor retrievals from a GPS receiver network. GPS Solut 17, 475–484 (2013). https://doi.org/10.1007/s10291-012-0293-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-012-0293-5