
Abstract
The processing of GPS radio occultation measurements for use in numerical weather predictions requires a precise orbit determination (POD) of the host satellite in near-real-time. Making use of data from the GRAS instrument on Metop-A, the performance of different GPS ephemeris products and processing concepts for near-real-time and real-time POD is compared. While previous analyses have focused on the achievable along-track velocity accuracy, this study contributes a systematic comparison of the resulting estimated bending angles. This enables a more rigorous trade-off of different orbit determination methodologies in relation to the end-user needs for atmospheric science products. It is demonstrated that near-real-time GPS orbit and clock products have reached a sufficient quality to determine the Metop-A along-track velocity with an accuracy of better than 0.05 mm/s that was formerly only accessible in post-processing. The resulting bending angles are shown to exhibit standard deviation and bias differences of less than 0.3 % compared with post-processed products up to altitudes of at least 40 km, which is notably better than 1 % accuracy typically assumed for numerical weather predictions in this height regime. Complementary to the analysis of ground-based processing schemes, the potential of autonomous on-board orbit determination is investigated for the first time. Using actual GRAS flight data, it is shown that a 0.5 m 3D rms position accuracy and a 0.2 mm/s along-track velocity accuracy can in fact be obtained in real-time with the currently available GPS broadcast ephemeris quality. Bending angles derived from the simulated real-time processing exhibit a minor performance degradation above tangent point heights of 40 km but negligible differences with respect to ground-based products below this altitude. Onboard orbit determination and, if desired, bending angle computation, can thus enable a further simplification of the ground segment in future radio occultation missions and contribute to reduced product latencies for radio occultation data assimilation in numerical weather predictions.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Starting with the GPS/MET experiment on MicroLab-1 (Kursinski et al. 1997), atmospheric sounding using opportunity signals from the GPS satellites has evolved into a key application of scientific GPS receivers in space (Yunck 2003). When passing the lower atmosphere, GPS signals experience a deflection that depends on the refractivity along the ray path and results in a modified Doppler shift of the received signal (Fig. 1). Atmospheric conditions can thus be retrieved by comparing the measured GPS signals with those expected for direct signal propagation without an atmosphere. Missions such as GRACE, Metop, COSMIC and TerraSAR-X/TanDEM-X presently collect GPS radio occultation measurements on a routine basis and contribute their data for meteorological and climate research. While radio occultation measurements constitute only a small fraction of the overall meteorological data presently assimilated by the European Centre for Medium Range Weather Forecasts (ECMWF), they are essentially bias free and complementary to other data types. As such, radio occultation measurements from satellites in low earth orbit (LEO) are among the most significant contributors to the reduction in forecast errors in numerical weather prediction models (Anthes 2011).

Geometry of GPS radio occultation measurements. The bending angle (α) and associated atmospheric conditions can be inferred by comparing the difference of the GPS and LEO satellite velocities (v GPS, v LEO) as projected on the actual signal path (e GPS and e LEO; red) with the corresponding value for the straight line signal path (e; blue). The tangent point marks the minimum altitude (h) of the signal path with respect to the surface of the Earth
As a key requirement for the analysis of radio occultation measurements, the orbit of the host satellite must be known with subdecimeter accuracy to properly isolate the atmospheric contribution to the observed signal phase and frequency. In addition, the orbit determination must be completed in near-real-time to support a timely delivery of radio occultation data products used in meteorological applications. To meet both timeliness and accuracy requirements for GPS-based precise orbit determination (POD), dedicated systems for near-real-time provision of accurate GPS orbit and clock information such as the Global Differential GPS System (GDGPS, Bar-Sever et al. 2003), the GRAS Support Network (GSN, Zandbergen et al. 2006), and the Real-Time Clock Estimation system (RETICLE, Hauschild and Montenbruck 2008) have been established.
In a continued effort to advance its ground system for radio occultation data processing and to provide design recommendations for future radio occultation missions, GPS-based near-real-time POD concepts have been assessed in a dedicated study of the European Organisation for the Exploitation of Meteorological Satellites (EUMETSAT) and the German Aerospace Center (DLR). The performance of different POD processing schemes as well as auxiliary GPS orbit and clock products has been compared in terms of both orbit quality and radio occultation data product quality. It is demonstrated that existing POD requirements are readily met with state-of-the-art POD techniques and near-real-time GPS data products but probably more stringent than actually required for near-real-time radio occultation product generation. This opens new prospects for real-time POD onboard the host satellite with benefits for more rapid radio occultation processing and a simplified ground system architecture.
The analysis presented hereafter is based on routine flight data collected by the GRAS receiver onboard Metop-A, but employs a different processing system than the established operational ground segment. In favor of an open architecture making best use of standard formats and interfaces, an independent processing chain has been built up for the performance assessment that can be executed in parallel to the operational GRAS data processing (Fig. 2). This facilitates the use of alternative auxiliary products, enables a flexible exchange of individual software modules, and supports the trade-off of alternative processing concepts.

Flow chart for the assessment of GRAS/Metop near-real-time orbit determination performance. See text for further explanation
Following an overview of the mission and instrument, the employed data sets (including GPS measurements for POD and radio occultation as well as auxiliary GPS orbit and clock data) are discussed. The subsequent sections are dedicated to a description of the employed POD tools and strategies as well as the radio occultation data processing. Thereafter, the achieved results are discussed and final conclusions are presented.
The Metop mission and GRAS instrument
As a European contribution to a joint system of polar satellites with the United States, EUMETSAT operates the series of Metop satellites (Klaes et al. 2007) in LEO. Metop-A is in orbit since 2006, Metop-B will be launched in mid-2012 and there will be at least half a year of joint operation in 2012 (von Engeln et al. 2011). The Metop satellites orbit the earth in a sun-synchronous “morning orbit” with an altitude of 820 km and a local time of the ascending node of 9:30 h that complements the 14:30 h “afternoon orbit” adopted for the polar satellites of the National Oceanic and Atmospheric Administration (NOAA).
One of the key instruments of the Metop satellites is the Global Navigation Satellite System Receiver for Atmospheric Sounding (GRAS; Silvestrin et al. 2000, Loiselet et al. 2000). GRAS radio occultation measurements of GPS satellites close to the earth limb are employed for numerical weather prediction as well as climate monitoring. Dual-frequency GPS measurements of higher elevation satellites can, furthermore, be employed for ionospheric analysis and space weather monitoring (Luntama et al. 2008; Anthes 2011). On average, a total of 650 globally distributed occultations from rising and setting GPS satellites are observed by the GRAS instrument on each day (von Engeln et al. 2011), which compares favorably with an average of 1,500–2,000 daily occultations recorded by the 6-satellites Constellation Observing System for Meteorology, Ionosphere and Climate (COSMIC; Anthes 2011) at the time of full operation.
GRAS offers L1 C/A and semi-code-less L1/L2 P(Y) tracking of up to 12 GPS satellites. The receiver is equipped with one zenith-looking antenna (GZA) as well as two high-gain beam-forming antennas pointing in velocity (GVA) and anti-velocity direction (GAVA) as shown in Fig. 3. A total of 8 dual-frequency channels are allocated to the zenith antenna and provides GPS pseudorange and carrier phase measurements for Metop POD at a 1 Hz sampling rate. The remaining channels (two each) are assigned to the forward and backward looking antennas to collect radio occultation measurements of rising and setting GPS satellites. The GRAS instrument supports both closed-loop tracking of occulting satellites at a 50 Hz measurement rate as well as open-loop tracking. In the latter case, the tracking channels are steered with Doppler shift values predicted from an onboard Doppler model and raw correlator outputs are collected at a 1 kHz sampling rate (Bonnedal et al. 2010). The open-loop technique enables tracking of very weak signals and provides radio occultation measurements down to very low tangent point altitudes (Fig. 1). It has, furthermore, enabled the detection of grazing sea-surface reflections of GPS signals in the field of view of the radio occultation antennas.

GRAS antenna accommodation and reference frame of the Metop spacecraft (adapted from Loiselet et al. 2000)
In the initial stage of the GRAS data processing, the atmospheric bending angles are derived for each radio occultation. The bending angles relate to the refractivity in the vicinity of the tangent point and can be directly assimilated in numerical weather prediction models or further used to derive refractivity, temperature, pressure, and humidity profiles. Computation of the bending angles is based on the excess Doppler shift, that is, the difference between the observed Doppler shift of a GPS signal during the occultation and the expected Doppler shift for a straight signal path in the absence of atmospheric refraction (Kursinski et al. 1997; Ao 2009). An accurate knowledge of the relative velocity of the observed GPS satellite and the LEO satellite is, therefore, required for the analysis of radio occultation data. Within the GRAS project, bending products must be disseminated within 2.25 h after the respective occultation to satisfy the timeliness requirements for radio occultation data users. Accordingly, the Metop POD must be performed in near-real-time.
Following considerations of Kursinski et al. (1997), a target velocity accuracy of 0.05 mm/s has been formulated for the Metop near-real-time POD performance (GRAS-SAG 1998). This value is itself based on GPS/MET dual-frequency orbit determination results of Bertiger and Wu (1996) and reflects the self-consistency of the along-track velocity component in the overlap region of daily reduced-dynamic orbit solutions covering a 27-h data interval. While the GPS/MET POD analysis lacks an external reference (such as satellite laser ranging measurements) and may in fact underestimate the actual orbit errors, it has been shown by Kursinski et al. (1997) that a 0.05 mm/s along-track velocity uncertainty introduces a negligible error of at most 0.2 % at 50–60 km altitude into the derived atmospheric parameters. The value is therefore widely considered as a guideline for the required POD accuracy of GPS radio occultation missions (Roselló Gulasch et al. 2009) and a 2σ threshold of 0.1 mm/s has ultimately been adopted for Metop (Pisacane 2002).
Contributions of the GRAS instrument to the bending angle products are required to exhibit an error of less than 0.4 % rms at altitudes below 15 km. Above this height, rms errors of up to 0.4 % or 1 μrad (whichever is larger) are tolerated (Luntama et al. 2008; von Engeln et al. 2009). The actual performance of the GRAS radio occultation measurements and products has been verified against ECMWF data and colocated COSMIC observations. Compared with COSMIC, a substantial improvement is evident from the bending angle noise relative to ECMWF predictions (1.2 μrad vs 1.9 μrad at 60 km altitude), which illustrates the benefit of the ultrastable oscillator (enabling an undifferenced radio occultation processing) and of the high-gain antennas (von Engeln et al. 2009). The instrumental noise alone has been assessed by Bonnedal et al. (2010) based on the results of Marquardt (2009) and amounts to less than 0.5 μrad in the derived bending angles.
Data sets and pre-processing
The present POD and radio occultation performance study makes use of GRAS data covering a 1-month period (November 15 to December 15) in 2011. The binary GRAS telemetry packets comprise raw measurements and correlator readings, which are time tagged by the Instrument Measurement Time (IMT) counter. Within the pre-processing, pseudorange and carrier phase measurements at common epochs are generated from the (asynchronous) observations of the zenith antenna and provided in the Receiver INdependent EXchange format (RINEX) for use in the POD process. As part of the measurement generation, a receiver timescale is established, which is closely synchronized with GPS time but retains a quadratic relation with the IMT over the selected processing arc (Montenbruck 2007). For the radio occultation processing, complex phase measurements as a function of receiver time are generated from the raw correlator data for the occultation antennas. Only closed-loop tracking radio occultation data are considered in the present analysis, since open-loop raw sampling data are only collected at very low tangent point heights and are thus least sensitive to orbit determination uncertainties.
Favoring an undifferenced processing of GPS measurements in the POD, both orbit and clock offsets of the tracked GPS satellites must be known with adequate accuracy. Overall, four different orbit and clock products are considered for the performance assessment (Table 1). Among these, the “COR” products from the Center for Orbit Determination in Europe (CODE, Dach et al. 2009), provide the most accurate GPS orbit and clock information. The products are generated with a half day latency based on a global monitoring station network of the International GNSS Service (IGS, Dow et al. 2009) and are used here to establish reference solutions for the POD and radio occultation processing performance assessment. The “GSN” orbit and clock solutions, which are operationally generated for EUMETSAT by the European Space Agency (ESA) based on observations from the GRAS Support Network (Zandbergen et al. 2006) as well as the “RTC” products created by DLR’s RETICLE system (Hauschild and Montenbruck 2008) from data of the IGS and DLR real-time network serve to illustrate the presently achievable near-real-time processing performance. While the RETICLE products are generated in real-time and achieve a slightly better accuracy, the GSN products offer an increased stability and guarantee-of-service. Finally, broadcast ephemeris parameters (“BCE”) provided to each GPS user as part of the navigation data stream modulated on the GPS signal are used to assess the POD and radio occultation product quality that might ultimately be achieved in a real-time onboard processing. For the data arc considered here, the respective information has been extracted from the raw navigation data frames provided in the GRAS telemetry for all tracked GPS satellites.
Orbit determination
Two different software tools have been employed for the generation of Metop satellite orbits based on the above input data products. ESA’s Navigation Package for Earth Observation Satellites (NAPEOS) is a generic software package for GNSS data processing as well as orbit determination and control. The BAHN orbit determination module implements state-of-the-art dynamic and measurement models (Springer 2009) for a wide range of radiometric and optical tracking data and is routinely used for mission operations at the European Space Operations Centre (ESOC). The GPS High-precision Orbit determination Software Tools (GHOST, Wermuth et al. 2010) of DLR constitute a generic package for multi-GNSS data analysis and GPS-based orbit determination of satellites in LEO. The Reduced-Dynamic Orbit Determination (RDOD) module used in the present analysis is based on a least-squares estimation scheme similar to BAHN but uses a reduced-dynamic approach with piece-wise constant empirical accelerations to augment the a priori force model (Montenbruck et al. 2005). Other differences in the employed processing standards are summarized in Table 2.
Both BAHN and RDOD are used along with CODE rapid GPS products to generate “best” orbit solutions with a timeliness of up to 1 day. Furthermore, near-real-time solutions are obtained in sliding batches of 6-h duration once every 1.5 h from the GSN and RTC GPS products (Table 3). While only the last quarter of each near-real-time product represents new orbit information based on the most recent observations, the adopted arc length offers an increased stability for the carrier phase bias estimation and ultimately an improved overall orbit determination orbit accuracy. For completeness, it is noted that the near-real-time processing based on sliding batch estimation adopted here differs substantially from the sequential square root information filter that is employed in the operational processing chain for GRAS data products at EUMETSAT (Martinez Fadrique et al. 2007). The present choice is motivated by a better overall performance and has become feasible due to notable advancements in computer power since the time of the initial GRAS ground segment design. Near-real-time batch processing with GSN products is therefore considered as an alternative to the square root information filter in a modernized EPS ground segment (Andres et al. 2010).
Complementary to the above methods, a real-time navigation filter suitable for onboard implementation has been studied. It is based on algorithms described previously in Montenbruck and Ramos-Bosch (2008), which are well compatible with the processing power of present onboard processors and are presently undergoing flight testing on the PROBA-2 spacecraft (Montenbruck et al. 2011). Since it is not possible to execute the real-time navigation filter onboard the Metop spacecraft itself, an offline version (RTNAV) has been used to process actual GRAS flight data on ground. Compared with the batch POD programs, the filter employs simplified dynamical and measurement models (Table 2) but is primarily limited by the use of broadcast ephemeris parameters for GPS orbit and clock information. For compatibility with the batch POD processing, the RTNAV filter was executed on one-day data arcs, which implies a daily restart and a slightly degraded navigation performance in the first 0.5 h after midnight.
Along with the estimated orbit, the offset between the receiver timescale and the GPS time system is estimated in all programs. The respective information is employed in the subsequent bending angle computation and enables an undifferenced processing of the radio occultation data with no need for tracking of a reference GPS satellite.
Bending angle processing
Based on the GRAS radio occultation antenna observations as well as the GPS and GRAS/Metop orbit and clock products, bending angles have been computed using the YAROS (Yet Another Radio Occultation Software) processor. YAROS is part of the EUMETSAT calibration and validation tool chain and is fully independent of the present operational GRAS Product Processing Facility. It comprises three distinct core modules for the generation of “reconstructed” observations from the raw GRAS instrument data (GRAS_L02L0R), the application of measurement corrections (GRAS_L0R2L1A) and, finally, the computation of the bending angle product (GRAS_L1A2L1B; see Fig. 2). YAROS implements both a geometrical optics approximation (valid above 8 km altitude) and a wave optics (WO) approach (Jensen et al. 2003) that also copes with multiple propagation paths in the lower atmosphere. The YAROS software itself has been extensively validated against the GRAS Product Processing Facility and external references such as ECMWF and COSMIC radio occultation data (see, e.g., von Engeln et al. 2011) and is considered as a prototype for future system upgrades.
For the assessment of the radio occultation data quality, the observed bending angles (“O”) are compared against bending angles obtained through a forward modeling of ECMWF meteorological data (background values, “B”) using the Radio Occultation Processing Package of the Satellite Application Facility on GRAS Meteorology (Culverwell 2011). The fractional difference (O–B)/B serves as a measure of the bending angle quality and is evaluated over the full range of geodetic altitudes covered by the occultation. By averaging over all occultations in the analysis period, both systematic biases and standard deviations are obtained that indicate the overall uncertainty of the retrieved bending angles. To mitigate the impact of outliers, a robust estimation based on Tukey’s biweight function (Hoaglin et al. 1983) is employed for the computation of the bending angle statistics. It is considered to yield a lower fraction of false errors and to retain a higher number of good observations than the statistical screening criteria presently employed in actual numerical weather predictions (Poli et al. 2010, Anlauf et al. 2011).
Results and discussion
Over the test period, the offline solutions for the GRAS/Metop orbit obtained with the NAPEOS and GHOST software exhibit a consistency of 5 cm (3D rms position) and 0.05 mm/s (3D rms velocity). This is in good accord with previous inter-agency comparisons (Montenbruck et al. 2008; Andres et al. 2010) and justifies their use as a reference for the near-real-time and real-time orbit product assessment. The respective results are collated in Table 3, where the individual products are compared against the OFF_COR_G solution. In case of the sliding batch near-real-time solutions, only the latest part that is contributed by new observation has been employed in the orbit comparison as well as the subsequent radio occultation processing analysis.
It may be recognized that the near-real-time products exhibit virtually the same accuracies as the offline products and are certainly well compatible with a <0.1 mm/s requirement for the along-track velocity error. Comparing NAPEOS and GHOST solutions, systematic offsets of about 6 mm in radial direction and 23 mm in cross-track direction can be identified in both the near-real-time and offline products, which matches results in Montenbruck et al. (2008). These biases are attributed to minor differences in the employed models and processing strategies (e.g., application of phase center variations from the inflight calibration) but are well within the overall error budget. Furthermore, the velocity solution does not exhibit relevant biases, which is of prime relevance for the radio occultation processing. As regards the (simulated) real-time navigation solution, a degradation by up to a factor of 10 may be observed for both the position and velocity in comparison with the offline and near-real-time processing. Interestingly, however, the along-track velocity error is only a factor of two worse than the formal performance requirement for radio occultation data analysis (Table 4; Fig. 4).

Along-track velocity error of GSN-based near-real-time orbit solution (NRT_GSN; top) and simulated real-time processing (RT_BCE; bottom). The processing gap on December 2 results from a system-wide software upgrade, while temporarily increased errors on December 15 are related to an in-plane orbit correction maneuver
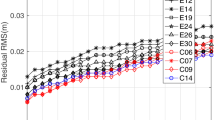
A comparison of the bending angle performance achieved with the different orbit products is given in Fig. 5 based on roughly 15100 rising and setting occultations. Due to the availability of clock information for various unhealthy GPS satellites in the CODE ephemerides, an up to 10 % increased number of occultations is available in the offline processing as compared to the near-real-time or simulated real-time chain. However, only the common events have been incorporated into the performance assessment.

Robust bias (left) and standard deviation (center) of bending angle products based on different GRAS/Metop orbit products for a total of 15,100 occultations. Both values refer to the fractional difference (O–B)/B of the observed (O) bending angle compared to a reference value based on forward modeling of ECMWF meteorological data (background values, B). The bold gray line provides the assumed standard deviation for data weighting of bending angles in the assimilation of radio occultation data at ECMWF (Poli et al. 2010; Healy et al. 2012). The fractional number of occultations (right) provides the percentage of occultations contributing information at a given altitude within a 2σ interval of the robust statistics
Biases with respect to ECMWF amount to roughly 0.2 % from 10 to 35 km and the robust standard deviation in this region is confined to less than 2 %. This is in good accord with previous analyses of the GRAS instrument performance (von Engeln et al. 2009, 2011). Below 10 km altitude, increased biases and standard deviations are encountered, since the employed geometrical optics processing is unsuited for multi-path affected occultations. In addition, the degrading number of occultations penetrating into the lower troposphere with closed-loop tracking can be recognized in this region. Between 35 and 45 km, a systematic bias of up to 1 % with respect to ECMWF predictions can be observed for all bending angle products. A similar bias is observed against all RO instruments that measure at these altitudes. It is therefore thought to be a bias in the ECMWF model, which results from the assimilation of biased radiance instruments (von Engeln et al. 2009).
As expected from the orbit comparison, all offline and near-real-time products provide an almost identical bending angle performance. Standard deviation and bias differences of bending angles obtained with the various products amount to less than 0.3 % up to altitudes of at least 40 km. Differences of the observed bending with respect to ECMWF predictions exhibit a standard deviation of about 2 % between 10 and 35 km. This is roughly twice as large as the 1 % error assumed for data weighting in the assimilation of radio occultation data in this height regime (Poli et al. 2010; Anlauf et al. 2011) but includes the errors of the ECMWF model used as reference. Outside this altitude range (i.e., below 10 km and above 35 km) the actual uncertainty of the observed bending angles is generally much lower than assumed in the assimilation process and a notably less conservative weighting could be applied particularly at high altitudes (Fig. 5).
Evidently, the standard deviation of the relative bending angle error with respect to ECMWF data is dominated by other factors than the GRAS/Metop along-track velocity uncertainty for both the offline and near-real-time orbit products (see Kursinski et al. (1997) for a discussion of such error sources). While orbit accuracy requirements for radio occultation processing have originally been formulated based on the (presumably optimistic) assessments of achievable offline orbit determination accuracies more than a decade ago (Kursinski et al. 1997, Bertiger and Wu 1996), the (near-)real-time provision of highly accurate GPS orbit and clock products nowadays enables the generation of precise LEO orbit products with a more than adequate quality for radio occultation processing in near-real-time.
Concerning a further reduction in the processing latency, the performance of bending angles based on simulated real-time orbit products (RT_BCE) has been assessed. Up to an altitude of 35 km, the standard deviation of these bending angles relative to the ECMWF reference differs by less than 0.5 % from the near-real-time and offline results, but increasing differences become obvious at higher altitudes (Fig. 5). At 50 km altitude, which reflects the current limit for radio occultation data assimilation, the standard deviation of the computed bending angles with respect to ECMWF results amounts to 8 %, whereas a 6 % standard deviation is achieved for offline and near-real-time solutions. On the other hand, the “real-time” bending angle performance is still substantially smaller than the 20 % fractional observation error presently assumed at this altitude for data weighting purposes in the assimilation of radio occultation data by the ECMWF (Healy et al. 2012). Evidently, an increased weighting of high-altitude bending angle observations would even be permissible for real-time generated LEO orbit information. This could ultimately help to better exploit the information content of radio occultation measurements while simultaneously reducing the processing latency.
Summary and conclusions
The performance of different POD concepts for GNSS radio occultation missions has been assessed both in terms of orbit accuracy and derived bending angle statistics. A consistency of the obtained along-track velocity of better than 0.05 mm/s is demonstrated for both the near-real-time and offline orbit determination of GRAS/Metop, which underlines the high quality of presently available near-real-time GPS orbit and clock products and enables a proper exploitation of the GRAS instrument performance. Likewise, an identical bending angle performance relative to ECMWF predictions is obtained for the near-real-time and offline processing, even though a somewhat larger number of occultations can usually be considered in the offline chain due the increased coverage of GPS orbit and clock data.
Complementary to the ground-based POD, the feasibility of real-time orbit determination has, furthermore, been assessed. Using a reference implementation of an onboard navigation filter along with actual GRAS GPS measurements and the associated broadcast ephemerides, an along-track velocity accuracy of 0.2 mm/s is achieved. This is slightly outside the formal 0.1 mm/s requirement for the Metop mission, but already yields competitive bending angle results in the altitude range of up to 40 km that is of primary relevance for current short term weather modeling. Further improvements can be expected from the continuous improvement of broadcast orbit and clock information resulting from GPS control segment upgrades and an increasing number of GPS satellites equipped with highly stable atomic frequency standards.
The above results strongly encourage the consideration of a full onboard processing of radio occultation data in future satellite missions. While not specifically examined within this study, the computation of bending angles based on geometric optics is considered to be well compatible with existing onboard processors and even a wave optics approach appears feasible on dedicated hardware. In combination with a GPS-based real-time navigation system providing continuous position and velocity information of adequate accuracy, bending angles can thus be computed onboard a remote sensing satellite and communicated to users on ground with minimum latencies and bandwidth requirements. While this does not render the conventional ground processing obsolete, it offers complementary radio occultation products with notably improved timeliness at the possible expense of a moderately reduced quality and coverage.
References
Andres Y, Righetti PL, Marquardt C (2010) Near real-time precise orbit determination for radio occultation and altimetry missions, ION-GNSS-2010 conference, Portland
Anlauf H, Pingel D, Rhodin A (2011) Assimilation of GPS radio occultation data at DWD. Atmos Meas Tech Discuss 4:1533–1554. doi:10.5194/amtd-4-1533-2011
Anthes RA (2011) Exploring earth’s atmosphere with radio occultation: contributions to weather, climate and space weather. Atmos Meas Tech 4:1077–1103. doi:10.5194/amt-4-1077-2011
Ao CO (2009) Atmospheric sensing using GNSS occultations, chap. 15. In: Gleason S, Gebre-Egziabher D (eds) GNSS applications and methods. Artech House, Norwood
Bar-Sever Y, Bell B, Dorsey A, Srinivasan J (2003) Space applications of the NASA global differential GPS system, ION-GPS-2003 conference, Portland
Bertiger W, Wu S-C (1996) Single frequency GPS orbit determination for low earth orbitors, ION-NTM-1996, Santa Monica
Bonnedal M, Christensen J, Carlström A, Berg A (2010) Metop-GRAS in-orbit instrument performance. GPS Solut 14(1):109–120. doi:10.1007/s10291-009-0142-3
Culverwell I (2011) Radio occultation processing package (ROPP)—an overview, EUMETSAT, SAF/GRAS/METO/UG/ROPP/001, version 5.0. http://grassaf.org/grassaf_ropp_overview.pdf
Dach R, Brockmann E, Schaer S, Beutler G, Meindl M, Prange L, Bock H, Jäggi A, Ostini L (2009) GNSS processing at CODE: status report. J Geod 83(3–4):353–365. doi:10.1007/s00190-008-0281-2
Dow JM, Neilan RE, Rizos C (2009) The International GNSS service in a changing landscape of Global Navigation Satellite Systems. J Geod 83(3–4):191–198. doi:10.1007/s00190-008-0300-3
GRAS-SAG (1998) The GRAS instrument on Metop—report of the GRAS-SAG, VR/3021/PI, EPS/MIS/TN/97805, version 1.2, 4 May 1998
Hauschild A, Montenbruck O (2008) Real-time clock estimation for precise orbit determination of LEO-satellites, ION-GNSS-2008, Savannah (2008)
Healy S, Hamrud M, Fouilloux A, Rennie M (2012) Use of two-dimensional operators when assimilating GPS-RO measurements. In: IROWG 2nd workshop, Estes Park. http://www.irowg.org/docs/Presentation/healy.pdf
Hoaglin D, Mosteller F, Tukey J (1983) Understanding robust and exploratory data analysis. Wiley, New York
Jensen AS, Lohmann MS, Benzon HH, Nielsen AS (2003) Full spectrum inversion of radio occultation signals. Radio Sci 38(3):1040. doi:10.1029/2002RS002763
Klaes K, Cohen M, Buhler Y, Schlüssel P, Munro R, Luntama J-P, von Engeln A, O’Clerigh E, Bonekamp H, Ackermann J, Schmetz J (2007) An introduction to the EUMETSAT polar system. Bull Am Meteorol Soc 88(7):1085–1096. doi:10.1175/BAMS-88-7-1085
Kursinski ER, Hajj GA, Schofield JT, Linfield RP, Hardy KR (1997) Observing Earth’s atmosphere with radio occultation measurements using the Global Positioning System. J Geophys Res 102(D19):23429–23465. doi:10.1029/97JD01569
Loiselet M, Stricker N, Menard Y, Luntama JP (2000) GRAS—MetOp’s GPS-based atmospheric sounder. ESA Bull 102:38–44
Luntama J-P, Kirchengast G, Borsche M, Foelsche U, Steiner A, Healy S, von Engeln A, O’Clerigh E, Marquardt C (2008) Prospects of the EPS GRAS mission for operational atmospheric applications. Bull Am Meteorol Soci 89(12):1863–1875
Marquardt C (2009) GRAS offline bending angle validation, presentation at 24th GRAS Science Advisory Group Meeting, EUMETSAT, Darmstadt
Martinez Fadrique FM, Agueda Mate A, Sancho Rodriguez-Portugal F (2007) GRAS NRT precise orbit determination: operational experience. In: 20th international symposium on space flight dynamics, Annapolis
Montenbruck O (2007) GRAS2Rnx—a RINEX generation tool for the GRAS instrument; GRAS-DLR-TN-0010, issue 1.1 DLR/GSOC, Oberpfaffenhofen
Montenbruck O, Ramos-Bosch P (2008) Precision real-time navigation of LEO satellites using Global Positioning System measurements. GPS Solut 12(3):187–198. doi:10.1007/s10291-007-0080-x
Montenbruck O, van Helleputte T, Kroes R, Gill E (2005) Reduced dynamic orbit determination using GPS code and carrier measurements. Aerosp Sci Technol 9(3):261–271. doi:101016/jast200501003
Montenbruck O, Andres Y, Bock H, van Helleputte T, van den IJssel J, Loiselet M, Marquardt C, Silvestrin P, Visser P, Yoon Y (2008) Tracking and orbit determination performance of the GRAS instrument on Metop-A. GPS Solut 12(4):289–299. doi:10.1007/s10291-008-0091-2
Montenbruck O, Swatschina P, Markgraf M, Santandrea S, Naudet J, Tilmans E (2011) Precision navigation using a low-cost GPS receiver. GPS Solut. doi:10.1007/s10291-011-0252-6
Pisacane G (2002) Metop/GRAS NRT POD requirements, EUM.EPS.GSE.FAX.02.109 25 EUMETSAT
Poli P, Healy SB, Dee DP (2010) Assimilation of Global Positioning System radio occultation data in the ECMWF ERA–Interim reanalysis. Q J Roy Meteorol Soc 136(653):1972–1990. doi:10.1002/qj.722
Roselló Gulasch J, Silvestrin P, Aguirre M, Massotti L (2009) Navigation needs for ESA’s earth observation missions, IAA-B7-1401. In: 7th IAA symposium on small satellite for earth observation, Berlin
Silvestrin P, Bagge R, Bonnedal M, Carlström A, Christensen J, Hägg M, Lindgren T, Zangerl F (2000) Space-borne GNSS radio occultation instrumentation for operational applications. In: Proceedings of the ION-GPS-2000, Salt Lake City, pp 872–880
Springer T (2009) NAPEOS mathematical models and algorithms. DOPS-SYS-TN-0100-OPS-GN, ESA/ESOC, issue 1.0. ftp://dgn6.esoc.esa.int/napeos
von Engeln A, Healy S, Marquardt Ch, Andres Y, Sancho F (2009) Validation of operational GRAS radio occultation data. Geophys Res Lett 36:L17809. doi:10.1029/2009GL039968
von Engeln A, Andres Y, Marquardt C, Sancho F (2011) GRAS radio occultation on-board of Metop. Adv Space Res 47:336–347. doi:10.1016/j.asr.2010.07.028
Wermuth M, Montenbruck O, van Helleputte T (2010) GPS high precision orbit determination software tools (GHOST). In: Proceedings of the 4th international conference on astrodynamics tools and techniques, Madrid, ESA WPP-308
Yunck TP (2003) Spaceborne GPS for POD and earth science. In: Reigber C, Lühr H, Schwintzer P (eds) First CHAMP mission results for gravity, magnetic and atmospheric studies. Springer, Berlin, pp 42–51
Zandbergen R, Ballereau A, Rojo E, Andres Y, Romero I, Garcia C, Dow J (2006) GRAS GSN near-real time data processing. IGS workshop, Darmstadt
Acknowledgments
The study makes use of GPS orbit and clock products provided by Center for Orbit Determination in Europe (CODE) based on data from the global GPS monitoring network of the International GNSS Service (IGS). The support of both institutions is gratefully acknowledged. The NAPEOS software as well as the GSN near-real-time GPS orbit and clock data are products of the European Space Operations Centre (ESOC) and used by EUMETSAT under license of the European Space Agency (ESA). Finally, the authors would like to thank ECMWF for providing the meteorological data for validation of the bending angle products.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Montenbruck, O., Hauschild, A., Andres, Y. et al. (Near-)real-time orbit determination for GNSS radio occultation processing. GPS Solut 17, 199–209 (2013). https://doi.org/10.1007/s10291-012-0271-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-012-0271-y