
Abstract
After a descent phase of about half a year, the Gravity field and steady-state Ocean Circulation Explorer (GOCE) reached the final orbital altitude of the first measurement and operational phase (MOP-1) in September 2009. Due to this very low orbital altitude and the inactive drag compensation during descent, the generation of reliable predictions of the GOCE trajectory turned out to be a major challenge even for short prediction intervals. As predictions of good quality are a prerequisite for frequent ranging from the tracking network of the International Laser Ranging Service (ILRS), Satellite Laser Ranging (SLR) data of GOCE was very sparse at mission start and made it difficult to independently calibrate and optimize the orbit determination based on data of the Global Positioning System (GPS). In addition to the GOCE orbit predictions provided by the European Space Agency (ESA), the Astronomical Institute of the University of Bern (AIUB) started providing predictions on July 22, 2009, as part of the Level 1b to Level 2 data processing performed at AIUB. The predictions based on the 12-h ultra-rapid products of the International GNSS Service (IGS) were originally intended to primarily serve the daylight passes in the early evening hours over Europe. The corresponding along-track prediction errors were often kept below 50 m during the descent phase and allowed for the first successful SLR tracking of GOCE over Europe on July 29, 2009, by the Zimmerwald observatory. Additional predictions based on the IGS 18-h ultra-rapid products are provided by AIUB since September 20, 2009, to further optimize the GOCE SLR tracking. In this article, the development of the GOCE prediction service at AIUB is presented, and the quality of the orbit predictions is assessed for periods with and without active drag compensation. The prediction quality is discussed as a function of the prediction interval, the quality of the input products for the GPS satellite orbits and clocks, and the availability of the GOCE GPS data. From the methodological point of view, different approaches for the treatment of the non-gravitational accelerations acting on the GOCE satellite are discussed and their impact on the prediction quality is assessed, in particular during the descent phase. Eventually, an outlook is given on the significance of GOCE SLR tracking to identify systematic errors in the GPS-based orbit determination, e.g., cross-track errors induced by mismodeled GOCE GPS phase center variations (PCVs).
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The Gravity field and steady-state Ocean Circulation Explorer (GOCE) was launched on March 17, 2009, into a very low earth orbit (LEO). The first core explorer GOCE of the Living Planet Program of the European Space Agency (ESA) is intended to serve solid earth physics, oceanography, geodesy, and glaciology by measuring the stationary part of the earth’s gravity field with the highest possible accuracy and spatial resolution (Rummel et al. 2002). The core instrument of the mission is a three-axis gravity gradiometer for inferring the small-scale structures of the earth’s gravity field from in situ measured acceleration differences (Drinkwater et al. 2006). For the derivation of the long wavelength part of the earth’s gravity field and for orbit determination, the satellite is equipped with a dual-frequency Global Positioning System (GPS) receiver. At least two measurement and operational phases (MOP-1, MOP-2) of about 6 month duration each were originally planned to derive the geoid with 1-cm accuracy at a spatial resolution of 100 km (Johannessen et al. 2003). MOP-1 has started on September 29, 2009, at a mean spherical altitude of 259.56 km (254.9 km when referring to the mean semi-major axis). A drag-free control system is used to maintain the very low orbital altitude by compensating for atmospheric drag by onboard ion-thrusters.
The scientific data processing from Level 1b to Level 2 is performed by the High-level Processing Facility (HPF) of the European GOCE Gravity Consortium (Koop et al. 2006). Precise orbit determination (POD) based on measurements of the GPS receiver is an integral part of the HPF. A rapid science orbit (RSO) is derived at the Delft Institute of Earth Observation and Space Systems (DEOS) with a latency of less than 1 day but with relaxed accuracy requirements (Visser et al. 2009). A precise science orbit (PSO) is derived at the Astronomical Institute of the University of Bern (AIUB) with a latency of about 2 weeks and stringent accuracy requirements of about 2 cm 1-D root mean square (RMS) error (Bock et al. 2007). Satellite Laser Ranging (SLR) measurements collected by the tracking network of the International Laser Ranging Service (ILRS, Pearlman et al. 2002) serve as independent data to validate the quality of the orbit products. GOCE SLR tracking is performed with highest priority by the ILRS tracking network.
Due to the short tracking passes of only 3–4 min duration, orbit predictions of good quality are a prerequisite for frequent ranging from the ILRS tracking network to the GOCE satellite. Similar to other LEO satellites such as CHAMP (Schmidt et al. 2002), the extremely low orbital altitude of GOCE makes it a challenge to reliably predict the satellite trajectory even for short prediction intervals, in particular during periods without drag-free control. GOCE SLR tracking was thus very sparse in the first part of the descent phase at mission start and limited to very few stations observing visible twilight passes, e.g., Yarragadee in Australia and San Juan in Argentina. Stations observing daylight passes such as all European stations, however, were not able to track GOCE with the predictions available at that time. This situation initiated activities at AIUB to provide GOCE orbit predictions in addition to the predictions provided by ESA.
Section “GOCE orbit evolution” provides a short description of the evolution the GOCE orbital altitude. Based on real data, section “GOCE orbit prediction strategy” presents different strategies for predicting GOCE orbit positions. Section “Update rate of GOCE orbit predications” discusses the circumstances for the selected update rates of the AIUB predictions, which were originally intended to primarily serve the daylight passes in the early evening hours over Europe. Section “Impact of operational solutions on SLR tracking” demonstrates the impact of the AIUB predictions on the GOCE SLR tracking, and section “Significance of GOCE SLR tracking” outlines the importance of a continuous and dense SLR tracking for scientific analyses.
GOCE orbit evolution
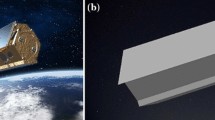
GOCE was launched on March 17, 2009, into a sun-synchronous, dusk-dawn orbit with an initial mean altitude of 287.91 km (mean distance from the geocenter minus the earth radius at the equator). After a very short launch and early operational phase (LEOP), the commissioning and calibration phase started on 20 March, 1 day after switching on the GPS receiver. On 30 March, the commissioning of the ion propulsion assembly (IPA) started and a few days later, on 6 April, the gradiometer commissioning started. During this early phase, the satellite was descending at a rate of about 172 m per day (see Fig. 1). On 24 April (day of year (DOY) 114), changes in the attitude control reduced the descent to about 138 m per day. Due to the unexpectedly low drag during the commissioning, GOCE was switched into the science mode already in its descent phase. On 7 May (DOY 127), two thrust biases of 4 mN at maximum and follow-up biases of about 2-2.5 mN brought GOCE into the first drag-free flight ever. Figure 2 (mid) illustrates that the along-track drag is compensated to a large extent during the drag-free flight and that the remaining variations are reduced to a magnitude similar to the radial direction. However, due to the extremely low atmospheric density at that time and altitude, a closed-loop drag-free flight was not feasible for a period longer than a couple of days, which would have required minimum thrusts of about 0.4 mN. The thrust range of the IPA is, however, between 0.6 and 20 mN. A slight increase in the orbital altitude during the first drag-free flight may be seen in Fig. 1.

GOCE orbital altitude as a function of time. Note the different periods of drag-free flight (visible as periods of zero gradient)

Estimated piecewise constant accelerations on 7 May. Note the different scales for the three components
A longer period of drag-free flight was initiated on 26 May (DOY 146) at an altitude of about 272.5 km with increased atmospheric density. In the course of this drag-free flight, on 9 June (DOY 160), various activities on the gradiometer calibration were initiated, e.g., the determination of the inverse calibration matrix (ICM) on 17–18 June (DOYs 168-169). As a consequence of these activities, the orbital altitude again increased as shown in Fig. 1. On 23 June (DOY 174), GOCE was switched back into the fine pointing mode for further descending to the final orbital altitude of 259.56 km. The GOCE ion engines started firing in open loop again on 13 September (DOY 256), and the satellite was brought in closed-loop drag-free flight on 14 September. The final orbital altitude of 259.56 km used for gravity field mapping during MOP-1 corresponds to a repeat cycle of 979 revolutions in 61 days.
GOCE orbit prediction strategy
Let us now describe the relevant aspects for the determination of LEO orbits from GPS data as they are implemented in a special version of the Bernese GPS Software (Dach et al. 2007). The same software version is currently used at AIUB to derive the GOCE PSO product and the orbit predictions for SLR tracking described in this article.
Pseudo-stochastic orbit modeling techniques as described by Jäggi et al. (2006) are used to realize the GOCE reduced-dynamic orbit determination. For the generation of the final PSO product (GOCE Level 2 Product Data Handbook 2009), which is delivered to the user community with a latency of 4 weeks, the 5-s GPS clock corrections (Bock et al. 2009) and the GPS final orbits from the Center of Orbit Determination in Europe (CODE, Dach et al. 2009), analysis center of the International GNSS Service (IGS, Dow et al. 2009) located at AIUB, are used to process the full amount of 1-s GPS data over an arclength of 30 h. The parameters of the reduced-dynamic orbit of the PSO product are the six initial osculating elements, three constant empirical accelerations acting over the entire arc in the radial, along-track, and cross-track directions, and (constrained) piecewise constant accelerations over 6 min acting in the same directions. No use is made of the GOCE common-mode accelerometer data, which implies that the piecewise constant accelerations mainly compensate the not explicitly modeled non-gravitational accelerations.
The same parametrization is used for the generation of the orbit predictions for SLR tracking. For the studies in this section, however, the GPS rapid orbits and the 30-s GPS rapid clock corrections of the previous day from the CODE analysis center are used to process 30-s sampled GPS data over an arclength of 24 h. Based on such an orbit (observed part), several strategies are studied for generating the GOCE orbit predictions by extrapolation.
“Straightforward” strategy
Starting from the last state vector of the observed part of the orbit, the most straightforward prediction strategy consists of a pure orbit extrapolation based on the dynamic models and dynamic parameters used for the orbit determination of the observed part of the previous day. Using the previously described parametrization, this implies that the impact of the non-gravitational accelerations is only taken into account in a very crude way by three constant accelerations, i.e., only by a mean value.
“Once-per-rev” strategy
A more refined but still simple treatment of non-gravitational accelerations may be realized by estimating once-per-revolution parameters. The positions obtained from the observed part of the previous day serve as pseudo-observations to initiate a new dynamic orbit determination with six initial osculating elements, three constant accelerations acting over the entire arc in the radial, along-track, and cross-track directions, and once-per-revolution periodic terms acting in the same directions. This fitted orbit is used for a pure orbit extrapolation based on the dynamic models and the dynamic orbit parameters estimated from the pseudo-observations. The once-per-revolution periodic parameters compensate for the largest part of the non-gravitational accelerations, i.e., not only for a mean value as in the case of the “straightforward” strategy but also for the main variation along the orbit.
“Empirical” strategy
This strategy is related to the first strategy but makes additional use of the piecewise constant accelerations obtained from the observed part of the previous day. Figure 3 shows the piecewise constant accelerations in the along-track direction for one particular day, but not as a function of time but along the orbit as a function of the argument of latitude. Such a representation allows to observe a distinct pattern in the along-track accelerations, e.g., pronounced negative accelerations at arguments of latitude of about 0 and 180° on that day, which correspond to local minima of the GOCE altitude above the earth’s ellipsoid. The observed pattern may be used to generate an empirical model of the unmodeled accelerations. Figure 3 shows mean values that are used to empirically take into account the accelerations of the observed part for the orbit extrapolation, again starting from the last state vector of the orbit determination of the previous day. As accelerations of the current day often show a good match with those of the previous day, such an approach may be successfully used for generating orbit prediction.

Empirical acceleration model as a function of the argument of latitude (DOY 185, 2009)
Assessment of prediction strategies
The different orbit prediction strategies were tested with GOCE data from DOYs 176-192, 2009. During that period, GOCE was in the descent phase (see Fig. 1) and made it difficult to generate predictions of good quality. The extrapolated positions are compared to precise orbits obtained from GPS data (available at the next day). Figure 4 shows the comparisons for the along-track direction at 12 h. Prediction errors are largest in the along-track direction and critical for SLR tracking as they show up as time biases at the tracking stations when ranging to the satellite. As expected, the “empirical” strategy provides the best results with a mean along-track deviation of 267 m after a prediction interval of 12 h. The “once-per-rev” and the “straightforward” strategy give inferior results with mean along-track deviations of 508 m and 465 m. Although the reported errors suggest significant differences between the three strategies, it has to be noted that the scatter in Fig. 4 is very large with standard deviations of 224, 353, and 305 m, respectively, and that each strategy is best for some of the days.

Prediction quality based on different extrapolation strategies after 12 h
The quality of the predictions decreases very rapidly with the length of the prediction interval. An extrapolation over 24 h increases the mean along-track errors to 1,089, 1,454, and 1,843 m for the three strategies. After 36 h, the along-track errors are as large as 2,574, 3,115, and 3,969 m. These numbers underline that a good prediction strategy is still helpful, but in order to keep the along-track errors small, a frequent update of the GOCE orbit predictions is of much greater importance.
Update rate of GOCE orbit predictions
The availability of GPS orbit and clock products in time and, most importantly, GOCE GPS data determine the update rates for the predictions computed at AIUB.
The IGS rapid (IGR) GPS orbit and clock products are not suitable for near real-time applications because of their latency. They are updated once per day and made available at 17 h, i.e., 17 h later than the last observations could contribute to the observed part of the GOCE orbit. The contribution from the CODE analysis center to the IGR, on the other hand, is available (in-house at AIUB) much earlier at about 7 h and would thus better serve the GOCE orbit predictions. However, a non-continuous distribution of the GOCE data from HPF’s central processing facility (CPF) to the single processing facilities (SPFs) makes this option not feasible either. Due to operational constraints, the data distribution is interrupted over night and the complete amount of GOCE GPS data of the previous day is available at AIUB only at about 10 h—too late for the generation of orbit predictions.
The IGS ultra-rapid (IGU) GPS orbit and clock products are of greater interest for the generation of GOCE predictions. They are updated four times per day and cover an interval of 48 h, where the first 24 h are estimated from real observations and the last 24 h are predicted orbit and clock information. Taking into account the latency of the GOCE GPS data, only the observed part of the IGU products can be used for the generation of the GOCE orbit predictions. The observed part of the 12-h IGU products, e.g., covers the interval from 12 h of the previous day to 12 h of the current day and is made available at 15 h. As the complete amount of GOCE GPS data of the same interval is made available to AIUB by the CPF at about 15.5 h, the GOCE orbit predictions can be submitted to the ILRS approximately half an hour later at about 16 h. This option was realized in a first step toward the establishment of the GOCE prediction service at AIUB. Unnecessary to say that the availability of the GOCE GPS data is crucial for a successful generation of the orbit predictions.
The quality of the IGU observed orbits is about 5 cm and thus comparable to the IGR orbits. The quality of the IGU observed clocks, on the other hand, is degraded with respect to the IGR clocks by about a factor of 2 (0.2 ns vs. 0.1 ns). In order to assess whether this affects the quality of the GOCE orbit predictions, the along-track errors are compared after a prediction interval of 24 h when using the CODE rapid products or the 12-h IGU products. Figure 5 shows the along-track errors at 0 h of the next day when using the CODE rapid products and at 12 h of the next day when using the 12-h IGU products. No obvious preference for one or the other solution can be given, although the mean along-track errors of 1,089 m for the rapid products and 922 m for the IGU products even seem to give a slight preference to the IGU products.

Prediction quality based on different GPS orbit and clock products after 24 h
The benefit of using IGU products is shown in the right part of Fig. 6 for the same time period. The along-track errors of the GOCE orbit predictions are shown in Fig. 6 at the fixed time of 0 h of the next day, i.e., after a prediction interval of 24 h when using the CODE rapid products and after 12 h when using the 12-h IGU products. It is obvious that the reduced length of the prediction interval is of utmost importance for the generation of GOCE orbit predictions. The mean along-track errors are significantly reduced from 1,089 m to 195 m. A similar reduction is also observed at later times, e.g., at 12 h of the next day (not shown) where the errors are 2,574 and 922 m, respectively.

Prediction quality at 0 h based on different GPS orbit and clock products for a period with and without drag compensation
The left part of Fig. 6 shows an analogous analysis for a short interval out of the second drag-free flight period (DOYs 153-159, 2009) without much calibration activities (see section “GOCE orbit evolution”). It can be clearly seen that the drag compensation significantly improves the prediction quality as the non-gravitational forces are already compensated to a large extent by the IPA. The results shown for the descent phase thus represent a pessimistic assessment on what can be expected from the GOCE prediction service at AIUB during the MOPs.
Impact of operational solutions on SLR tracking
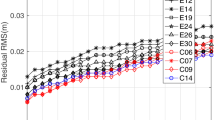
Since July 21, 2009, GOCE orbit predictions have been submitted on a regular basis to the ILRS using the 12-h IGU products. A few days later, on 29 July (DOY 210), the first successful GOCE SLR tracking over Europe was reported by the station Zimmerwald, and over Africa by the station Hartebeesthoek. Starting with DOY 210, Fig. 7 shows for 30 days the along-track errors of the submitted predictions at 17 h during the descent phase. Successful trackings from the European SLR stations Zimmerwald (ZIML), Herstmonceux (HERL), Potsdam (POT3), and Graz (GRZL) are indicated by circles. As at that time the GOCE evening passes over Europe were scheduled at approximately 17 h during daylight, Fig. 7 provides a realistic measure for the required accuracy of the GOCE orbit predictions to allow for SLR daylight tracking. A prediction quality of about 50 m is apparently needed, which corresponds to a time bias of about 6.5 ms in the case of the GOCE orbital velocity of 7.8 km/s. Significantly larger time biases are difficult to handle by the SLR stations, in particular in an automated environment without human interaction, due to the very short tracking passes of only 3–4 min duration. The two circles in Fig. 7 at the bottom line for POT3 and GRZL indicate that GOCE was not tracked on the evening pass but on the morning pass of the next day (passes are always scheduled around dusk and dawn due to the sun-synchronous orbit). All SLR stations listed in Fig. 7 used the GOCE orbit predictions computed at AIUB (W. Gurtner, P. Gibbs, L. Grunwaldt, G. Kirchner, priv. comm.).

Prediction quality of submitted solutions at 17 h (12-h IGU products used). Trackings from European SLR stations are indicated by circles
Due to the GOCE data downlink that takes place once-per-revolution, the GPS data is distributed in once-per-revolution batches to the SPFs. The bars in the background of Fig. 7 indicate the completeness of the GPS data when the generation of the GOCE orbit predictions has started. Bars going up to the top of Fig. 7 indicate that the observed part is completely covered by GPS data with none of the once-per-revolution files missing. If files are distributed with some latency, however, they cannot be taken into account for the orbit computation. As a consequence, the observed part is shorter than 24 h as indicated by the length of the bars in Fig. 7. The predictions are based on the full amount of GPS data for about half of the days of the 30-day period shown. For the other days, the correlation of the data availability with the prediction quality reveals (sometimes) quite striking coincidences, e.g., for DOYs 219 and 236. For other days, however, the prediction quality is not related with the data availability. On DOY 231, e.g., the GPS data availability was erroneously assumed to be complete and led to a degraded prediction quality (a re-computation revealed an achievable prediction quality of 40 instead of the reported 75 m). A similar operating error is also responsible for the inferior quality on DOY 221. In order to suppress such effects, which may determine whether SLR stations are able to successfully range to GOCE or not, time windows are meanwhile set automatically based on the actual availability of the GPS data. In addition, it was recognized that the observed part should rather be shortened by 6 min if the very last interval of piecewise constant accelerations is not fully covered with GPS observations. One weakly determined acceleration of the observed part may be sufficient to degrade the empirical acceleration model and propagate into the orbit extrapolation at every revolution (see section “Empirical strategy”).
Since September 20, 2009, GOCE orbit predictions have also been submitted on a regular basis using the 18-h IGU products to improve the GOCE SLR tracking for other regions than Europe. The observed part of the 18-h IGU products covers the interval from 18 h of the previous day to 18 h of the current day and is made available at 21 h. At 21 h, however, the GOCE GPS data is not fully available at AIUB but only up to about 16 h due to the non-continuous data distribution. The remaining 2 h of GPS data is distributed on the next day and are thus not useable for GOCE orbit predictions based on the 18-h IGU products. The predictions can be made available approximately half an hour later at about 21.5 h. Initial tests started on 2 September (DOY 245) and showed that the solutions may be of an acceptable quality despite the incomplete GPS data. Figure 8 shows the along-track errors at 23 h (corresponding to 17 h for the solutions based on the 12-h IGU products) for a short period at almost the final orbital altitude (the closed-loop drag-free flight of MOP-1 started on 14 September). The gradually decreasing length of the bars in Fig. 8 reflects the changing downlink times and indicates that the time intervals covered by the once-per-revolution files are continuously shifted to earlier times by about 3.5–4 min per day. From certain days on (DOY 251 in Fig. 8), one more revolution period can be taken into account and the pattern restarts again.

Prediction quality of test solutions at 23 h (18-h IGU products used)
Significance of GOCE SLR tracking
SLR measurements are the only available tracking data to independently validate the quality of the GOCE PSO product. Figure 9 shows the daily number of passes observed by the ILRS tracking network. Although all capable stations have attempted to acquire the satellite, GOCE SLR tracking was very sparse at mission begin and restricted to the Australian and South American continent due to visible twilight passes. Figure 9 clearly shows that the launch of the GOCE prediction service at AIUB on DOY 201 triggered new tracking activities. Starting with DOY 210, the GOCE SLR tracking could be significantly improved, in particular over Europe as mentioned earlier in this article. Such an increased data volume is of utmost importance to assess the quality of the GOCE PSO product.

Daily number of GOCE passes observed by the ILRS tracking network (DOYs 105-266, 2009)
Traditionally, SLR data has played an important role for calibrating and optimizing the microwave-based POD of GNSS satellites (e.g., Urschl et al. 2007) and LEO satellites (e.g., Jäggi et al. 2006). For GPS-based LEO POD, the limiting factors are nowadays mainly the modeling of the phase center variations (PCVs) of the LEO GPS antennas (Jäggi et al. 2009). Neglected or mismodeled PCVs significantly deteriorate the computed LEO trajectories and, in particular, may shift the orbits in the cross-track direction up to several centimeters. As SLR measurements are mainly sensitive in the radial direction for most LEO satellites (due to their still “high” altitude), PCV-induced shifts in the cross-track direction could so far not be independently assessed (Jäggi et al. 2009).
Due to the extremely low orbital altitude of GOCE, however, SLR measurements are not predominantly sensitive in the radial direction, but also in the along-track and particularly in the cross-track direction. In order to identify the amount of SLR measurements suitable for detecting potential cross-track shifts, Fig. 10 shows the SLR tracks as a function of the azimuth and nadir angle as seen by the GOCE satellite. An azimuth of 0° points into the flight direction, a nadir angle of 0° points to the earth. Figure 10 shows that there is hardly any SLR tracking at low nadir angles, which correspond to the radial direction of the satellite orbit. Most SLR tracking is realized for nadir angles between 60 and 70°, which rather correspond to the along-track and the cross-track direction of the orbit depending on the azimuth angle of the SLR track (azimuth 0 and 180° correspond to the along-track direction, azimuth 90 and 270° correspond to the cross-track direction). It can be recognized that the majority of the GOCE SLR data is actually suitable for detecting potential systematic errors in the cross-track direction—really a novelty for the validation of a LEO orbit. Note that a nadir angle of 71° in Fig. 10 corresponds to a minimum elevation angle of 10° as seen from the SLR stations. A better monitoring of the GOCE cross-track component could thus only be achieved if SLR stations adopted an even lower elevation mask in the east and west direction.

Azimuth-nadir plot of SLR tracks as seen from the GOCE satellite (DOYs 110-271, 2009)
Figure 10 shows that the number of SLR tracks is currently not yet equally distributed on both sides of the satellite. A further improvement in the coverage of the GOCE orbit with SLR data is therefore still desirable to facilitate a proper quality assessment of the GOCE PSO product. Corresponding investigations are currently performed for the PSO determination in the framework of the GOCE HPF and will be presented in the near future.
Conclusions
Satellite Laser Ranging data of GOCE was very sparse early in the mission, which made it difficult to independently calibrate and optimize the GPS-based orbit determination in the framework of the GOCE HPF. As orbit predictions of good quality are required for a successful SLR tracking, an effort was started on July 21, 2009 (DOY 202) to provide GOCE orbit predictions in addition to those from ESA as part of the Level 1b to Level 2 data processing at AIUB. Since September 20, 2009, the predictions are updated twice per day and are based on the 12- and 18-h IGU products. Due to the non-continuous distribution of the GOCE GPS data by HPF’s CPF, the update rates cannot be further increased. The new predictions have nevertheless significantly improved the GOCE SLR tracking. European SLR stations in particular could benefit from the predictions based on the 12-h IGU products due to very short prediction intervals for the evening passes. In combination with a reliable prediction strategy based on empirical accelerations estimated from GPS data of the observed part, the along-track errors for the European evening passes were often kept below 50 m during the descent phase. Thanks to the increased SLR data volume, it will be possible to independently assess the quality of the GOCE PSO product in the framework of the HPF.
References
Bock H, Jäggi A, Švehla D, Beutler G, Hugentobler U, Visser P (2007) Precise orbit determination for the GOCE satellite using GPS. Adv Space Res 39(10):1638–1647. doi:10.1016/j.asr.2007.02.053
Bock H, Dach R, Jäggi A, Beutler G (2009) High-rate GPS clock corrections from CODE: support of 1 Hz applications. J Geod 83(11):1083–1094. doi:10.1007/s00190-009-0326-1
Dach R, Hugentobler U, Fridez P, Meindl M (eds) (2007) Bernese GPS Software Version 5.0. Documentation. Astronomical Institute, University of Bern, Bern
Dach R, Brockmann E, Schaer S, Beutler G, Meindl M, Prange L, Bock H, Jäggi A, Ostini L (2009) GNSS processing at CODE: status report. J Geod 83(3–4):353–365. doi:10.1007/s00190-008-0281-2
Dow J, Neilan R, Rizos C (2009) The international GNSS service in a changing landscape of global navigation satellite systems. J Geod 83(3–4):191–198. doi:10.1007/s00190-008-0300-3
Drinkwater M, Haagmans R, Muzi D, Popescu A, Floberghagen R, Kern M, Fehringer M (2006) The GOCE gravity mission: ESA’s first core explorer. In: 3rd GOCE User Workshop, 6–8 November 2006, Frascati, Italy, pp 1–7, ESA SP-627
GOCE Level 2 Product Data Handbook (2009) GO-MA-HPF-GS-0110, Issue 4.1, European GOCE Gravity Consortium. http://earth.esa.int/pub/ESA_DOC/GOCE/Product_Data_Handbook_4.1.pdf
Jäggi A, Hugentobler U, Beutler G (2006) Pseudo-stochastic orbit modeling techniques for low-Earth orbiters. J Geod 80(1):47–60. doi:10.1007/s00190-006-0029-9
Jäggi A, Dach R, Montenbruck O, Hugentobler U, Bock H, Beutler G (2009) Phase center modeling for LEO GPS receiver antennas and its impact on precise orbit determination. J Geod 83(12):1145–1162
Johannessen JA, Balmino G, LeProvost C, Rummel R, Sabadini R, Sünkel H, Tscherning CC, Visser P, Woodworth P, Hughes CW, LeGrand P, Sneeuw N, Perosanz F, Aguirre-Martinez M, Rebhan H, Drinkwater MR (2003) The European gravity field and steady-state ocean circulation explorer satellite mission: its impact on geophysics. Surv Geophys 24:339–386. doi:10.1023/B:GEOP.0000004264.04667.5e
Koop R, Gruber T, Rummel R (2006) The status of the GOCE high-level processing facility. In: 3rd GOCE UserWorkshop, 6-8 November 2006, Frascati, Italy, pp 195-205, ESA SP-627
Pearlman MR, Degnan JJ, Bosworth JM (2002) The International Laser Ranging Service. Adv Space Res 30(2):135–143. doi:10.1016/S0273-1177(02)00277-6
Rummel R, Balmino G, Johannessen J, Visser P, Woodworth P (2002) Dedicated gravity field missions–principles and aims. J Geodyn 33:3–20. doi:10.1016/S0264-3707(01)00050-3
Schmidt R, Baustert R, König R, Reigber C (2002) Orbit Predictions for CHAMP—development and status. In: Reigber C, Lühr H, Schwintzer P (eds) First CHAMP mission results for gravity, magnetic and atmospheric studies. Springer, Berlin, pp 104–111
Urschl C, Beutler G, Gurtner W, Hugentobler U, Schaer S (2007) Calibrating GNSS orbits with SLR tracking data. In: Proceedings of the 15th ILRSWorkshop, 15–20 October 2006, Canberra, Australia
Visser PNAM, van den IJssel J, Van Helleputte T, Bock H, Jäggi A, Beutler G, Švehla D, Hugentobler U, Heinze M (2009) Orbit determination for the GOCE satellite. Adv Space Res 43(5):760–768. doi:10.1016/j.asr.2008.09.016
Acknowledgments
This article is dedicated to Prof. Werner Gurtner, who passed away on October 24, 2009, after a long illness. W. Gurtner was the head of the Zimmerwald observatory since 1987 and chair of the ILRS Governing Board since 2002. His support and promotion of the activities described in this article are gratefully acknowledged. The study was performed in the framework of the GOCE High-level Processing Facility, which is funded by ESA.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Jäggi, A., Bock, H. & Floberghagen, R. GOCE orbit predictions for SLR tracking. GPS Solut 15, 129–137 (2011). https://doi.org/10.1007/s10291-010-0176-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-010-0176-6