
Abstract
Several numerical weather prediction (NWP) models provide information on the 3D state of the neutral atmosphere which has enabled GNSS researchers to have improved a priori information of the delay induced in the GNSS signals. However, the quality of weather models on the one hand and computational difficulties on the other, are motivations to develop an algorithm based partly on NWP models, while still estimating the remaining residual delay through GNSS processing strategies. An algorithm has been developed to estimate horizontal delay gradients from Meteorological Service of Canada NWP models. The GNSS software “Bernese” has also been modified to handle these gradients, as well as zenith delay and mapping functions based on NWP models in phase and code observation equations. Month-long precise point positioning results show strong correlation between north–south hydrostatic gradients and latitude differences, with significant but less strong correlation with the height and zenith total delay parameters. The longitude components were not sensitive to the implementation of gradients. High precision GNSS applications such as long term geodynamics studies, realization of terrestrial reference frames and climatology and consequential interpretations may be affected by ignoring the asymmetry of the neutral atmosphere. In addition to estimating the gradients, implementing a priori information on gradients in the processing software may have an impact on estimated results and consequential interpretations.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
It has been shown that propagation delay due to gradients in the Earth’s neutral atmosphere can affect high precision radiometric space geodetic techniques results such as VLBI and GNSS (Davis et al. 1993; Chen and Herring 1997). This effect can be significant when observations at low elevation angles are used in situations involving the passage of weather fronts. Furthermore, as the thickness of the atmosphere decreases toward the poles this can have a systematic effect on hydrostatic gradients and hence a systematic bias in positioning results.
Iwabuchi et al. (2003) reported differences between estimated zenith total delay (ZTD) in precise point positioning (PPP) with and without gradient estimation that were correlated with the north components of the estimated gradients. Also, in a simulated study, they concluded that a north–south (NS) horizontal delay gradient of 1 mm (by definition, horizontal delay gradients are integrations of gradients of refractivity along a vertical profile scaled by height; hence they have units of distance) gave rise to negative ZTD biases of about 1 mm.
Boehm and Schuh (2007) estimated gradients using a three-profiles approach from the model of the European Centre for Medium-range Weather Forecasts (ECMWF) for VLBI analysis. They reported an improvement in the analysis of VLBI sessions using computed horizontal gradients as a priori values when the gradients cannot be estimated.
More recently, Hobiger et al. (2008) used numerical weather prediction (NWP) ray-traced slant delays for PPP in Eastern Asia. They concluded that due to the imperfection of NWP models it is still necessary to estimate residual delays. However, despite the considerable computational cost of 3D ray-tracing, they reported very minor improvement in coordinate repeatability compared to the standard approach of modern mapping functions and linear gradient estimation.
Although independent observations show good accuracy of zenith hydrostatic delay (ZHD) derived from NWP models especially in low altitude regions, the accuracy of zenith wet delay (ZWD) derived from these models is usually far less than that of ZHD (Ghoddousi-Fard and Dare 2006; Ghoddousi-Fard et al. 2008). While NWP models provide far more realistic 3D atmospheric structure than standard atmosphere models, slant delays derived from NWP models are still not accurate enough for high precision GNSS positioning applications without estimation of residual tropospheric delay. Hence 3D ray-tracing through NWP models may not be worth the effort.
An alternative approach with less computational difficulty, yet still considering the asymmetry of the atmosphere through the use of NWP models, could be implementing the NWP gradients in the GNSS phase and code observation equations. It may be more practical to implement hydrostatic gradients rather than non-hydrostatic or total gradients for two reasons:
-
1.
The higher accuracy of hydrostatic gradients derived from NWP models compared to non-hydrostatic gradients.
-
2.
For GNSS measurements down to a 3° elevation angle, the atmosphere contributing to the hydrostatic path delay has a horizontal radius of about 700 km around the station (Ghoddousi-Fard and Dare 2007). Therefore even low resolution NWP models may be able to provide useful hydrostatic gradient estimates.
An algorithm has been developed that enables the calculation of horizontal gradients using the NWP models at the user location. The Bernese GPS software Version 5.0 (Beutler et al. 2007) has been modified to handle the gradients. Furthermore, zenith and slant delay from Metrological Service of Canada NWP models and our ray-tracing package (Ghoddousi-Fard et al. 2008) employed for estimation of the “a” coefficient of the Vienna Mapping Functions 1 (VMF1) (Boehm et al. 2006) has been implemented in the GPS software.
In this paper the effect of hydrostatic gradients in PPP GPS coordinate and tropospheric parameter estimation are presented.
NWP gradients in GNSS observation equations
Slant total delay (STD) in GNSS signals can be modeled as (Chen and Herring 1997):
where ZHD and ZWD are the zenith hydrostatic and non-hydrostatic delay, respectively, mfh and mfnh are the hydrostatic and non-hydrostatic mapping functions, mfG is the gradient mapping function, Gns and Gew are the NS and east–west (EW) delay gradient contributions, respectively, and az is the azimuth of the GNSS signal.
A number of gradient mapping functions have been developed, most notably those of Chen and Herring (1997) and Davis et al. (1993). A similar formulation to Eq. 1 may be derived by assuming a tilted atmosphere (Meindl et al. 2004) in which mfG in Eq. 1 is replaced by \( \frac{{\partial {\text{mf}}}}{\partial z} \) where z is the zenith angle and mf is an arbitrary mapping function. Figure 1 shows the difference between commonly used gradient mapping functions and the hydrostatic gradient mapping function of Chen and Herring (1997) referred to as CH(h). The compared mapping functions include the non-hydrostatic Chen and Herring (CH(nh)), Davis et al. (1993) with the hydrostatic Niell (1996) mapping function (Davis(NMFh)), Davis with the non-hydrostatic Niell mapping function (Davis(NMFnh)), and derivative of the hydrostatic and non-hydrostatic mapping functions of Niell and Vienna (VMF1) with respect to zenith angle. The large difference between gradient mapping functions at low elevation angles might be significant. The validation of gradient mapping functions is not a trivial task. However, current strategies for high precision GNSS processing either ignore the low elevation measurements or down-weight them by an elevation angle dependent function. This makes the choice of gradient mapping function less critical. A number of authors have reported that the results of VLBI and GPS are not sensitive to the choice of gradient mapping function (Bock and Doerflinger 2001; Bar-Sever et al. 1998; MacMillan 1995). These references refer to the effect of the gradient mapping function when it is only used for estimation of gradients; i.e., as a part of the design matrix. We have also investigated the effect of the gradient mapping function in our approach; i.e., when it is also used to correct the slant delay a priori. Figure 2 shows the difference that using the derivative of hydrostatic or non-hydrostatic VMF1 as a gradient mapping function can cause in the slant hydrostatic delays over 24 h of measurements. Only 0.15% of measurements in the day were affected by more than 0.5 cm.

Differences of the most commonly used gradient mapping functions from CH(h) during DoY 197, 2007 at station ALGO. As an example, values in parentheses in the legend are the differences at 7° elevation angle

Difference in slant hydrostatic delay as a result of using the derivative of the hydrostatic or non-hydrostatic VMF1 as a gradient mapping function. Station: ALGO, DoY 197, 2007
We have developed an algorithm that enables the calculation of delay gradients using the NWP models at the user location. One may refer to Ghoddousi-Fard et al. (2008) for details on the algorithm. In order to investigate the effect of implementing NWP gradients in GPS observation equations, the Bernese GPS software version 5.0 has been modified by the first author (the modified version hereafter referred to as mBernese) to be able to consider the gradients in the pseudorange and carrier-phase equations. We have implemented Eq. 2 for correcting a priori slant tropospheric delay in the GPS observation equations. A new input file has been defined for mBernese to be able to handle NWP parameters in all related programs and subroutines through the menu system. ZHD, ZWD and VMFs are calculated every 3 h from our ray-tracing software together with delay gradients using the above mentioned algorithm. The derivative of non-hydrostatic VMF1 is used as the gradient mapping function. Hence considering the hydrostatic zenith delay and gradients, the a priori slant delay (SD) at epoch i to satellite j (SD j i ) can be written as
where ZHD i is the zenith hydrostatic delay from the NWP model interpolated to epoch i, VMFH1 j i and VMFW1 j i are the hydrostatic and wet VMF1 (partly from NWP) for satellite j interpolated at epoch i, z j i and az j i are the zenith angle and azimuth at epoch i to satellite j, respectively, and \( {\text{Gh}}_{{{\text{NS}}_{i} }} \) and \( {\text{Gh}}_{{{\text{EW}}_{i} }} \) are the hydrostatic north–south and east–west gradients from NWP interpolated at epoch i, respectively.
Figure 3a shows the a priori SD resulting from a standard atmosphere, Saastamoinen (1973) zenith hydrostatic model and Niell hydrostatic mapping function (hereafter referred to as default) at station ALGO on DoY 197, 2007. Figure 3b shows the difference of SD from NWP ZHD and VMFH1 (Eq. 3 without gradient components) from default. Figure 3c shows the difference between SD from Eq. 2 and the default. As can be seen in Fig. 3b, the use of priori ZHD from NWP caused a difference varying from 10.6 to 150 mm with respect to the default scenario (Fig. 3a) in this case. The range of differences further increased from 10.5 to 179.6 mm when hydrostatic gradients were also considered. The differences between the NWP option with and without hydrostatic gradients as a priori can be seen in Fig. 3d. One might expect larger differences in situations like the passage of weather fronts or, in case of ZHD, where the sea-level pressure is far different from that of standard models used in GNSS software. One such location is the belt around Antarctica where the annual average sea-level pressure is of the order of 985 hPa (Peixoto and Oort 1993), far less than what is usually considered in models based on a standard atmosphere. Some models such as Global Tropospheric Navigation (GTN) developed by Schueler et al. (2001) and Global Pressure and Temperature (GPT) developed by Boehm et al. (2007) are based on analysis of NWP data and hence may be able to account for actual atmospheric behaviour at a particular location.

a A priori slant delay from the Saastamoinen model with hydrostatic Niell mapping function. b Difference between slant delay resulting from NWP hydrostatic zenith delay with VMF1 and a. c Difference between slant delay resulting from NWP hydrostatic zenith delay, gradient and VMFH1, and a. d Difference between slant delay resulting from NWP hydrostatic zenith delay with VMF1, with and without hydrostatic gradients. All at station ALGO on DoY 197, 2007
Data analysis and results
A PPP processing engine using mBernese has been employed in three scenarios:
-
1.
Default processing options: Extrapolated standard atmosphere parameters used in the Saastamoinen (1973) model multiplied by the hydrostatic Niell mapping function as a priori SD. Non-hydrostatic Niell mapping function used for estimation of ZTD residuals and tropospheric gradients every 2 and 24 h, respectively.
-
2.
Use of NWP ZHD and hydrostatic VMF1 as a priori SD, non-hydrostatic VMF1 for estimation of ZTD residuals and tropospheric gradients every 2 and 24 h, respectively.
-
3.
Same as above but further correcting the a priori SD by adding NWP hydrostatic gradients following Eq. 2.
In all scenarios, the undifferenced ionosphere-free linear combinations of phase and code were used as the basic observables. Use of low elevation angle observations is necessary to decorrelate station height and ZTD components in the design matrix. However, low elevation angle measurements are more vulnerable to multipath, mapping function errors and phase center variations. While observations down to a 3° elevation angle were used, a weighting function of sin2(e), where e is the elevation angle, was used to down-weight the low elevation angle measurements.
The Bernese GPS software Version 5.0 uses a deterministic approach for parameter estimation by least squares. In this software, tropospheric zenith delay and gradients are treated as piece-wise linear parameters. This means that the partial derivatives of the tropospheric parameters in the design matrix are multiplied by:
where t i is the current epoch, t 0 is the reference epoch of the estimation interval and Δt is the estimation interval size.
A piece-wise linear parameterization, when the parameters are assumed to be correlated, is roughly equivalent to a random walk parameterization (Bock and Doerflinger 2001). No relative constraint was introduced for estimation of ZTD and gradients in this paper. When the gradients are being estimated every 24 h the introducing of the relative constraint was not found to have any significant effect on the estimated parameters.
IGS absolute phase center models for satellite and receiver antennas that are dependent on both the elevation angle and azimuth are used. Schmid et al. (2005) reported that a transition from relative to absolute phase center models could cause jumps of up to 5 mm in the horizontal position and up to 1 cm in the height component. They also mentioned that an absolute antenna phase center model has the advantage of reducing the dependence of the coordinate results on the elevation cut-off angle. IGS has switched to an absolute phase center model since GPS week 1400 (IGS 2005). The antenna phase center change, which was carried out as a part of an updating of the IGS reference frame realization, mainly affects the height component and caused a decrease of weekly average estimated scale bias (IERS 2006). We used earth rotation parameters, and final satellite clocks and orbits from IGS. We have also applied corrections for ocean tide loading. RINEX files for the IGS stations shown in Table 1 covering the month of July 2007 were processed three times according to the above described scenarios. Receiver and antenna types together with approximate coordinates of the investigated stations are also presented in Table 1.

NWP hydrostatic gradients at station ALGO over the month of July 2007; a EW, b NS
In order to assess the results, we adopted as reference values the IGS Analysis Centers’ combined cumulative solution up to week 1445, together with final IGS ZTD estimates (at 5 min intervals provided by Jet Propulsion Laboratory) and hereafter refer to them as “IGS solution”.
The PPP results are from a free network solution and hence the resulting coordinates share the reference frame defined by the orbits and clocks. Since GPS week 1400, the IGS products are available in the IGS05 reference frame. However, one should note that as already pointed out by others (Teferle et al. 2007) no GPS software is fully consistent with the combined IGS products. While results presented in this paper are not from any kind of transformation between our coordinate results and those of the IGS, the statistics regarding differences with respect to IGS cumulative solutions may be considered as a reference for intercomparison.
In Table 2, one can see the extreme differences of estimated parameters between scenario 1 (default) and scenario 2 (NWP ZHD and mapping function without gradients). As expected, scenario 2 mainly affects the height and ZTD values while there is no significant effect on horizontal components. These extreme differences are mainly associated with the periods with largest discrepancy between ZHD and mapping function values from NWP and those from Saastamoinen (with constant standard atmosphere) and Niell mapping function. One should also note that for these periods the estimated heights at all investigated stations (and ZTD at most investigated stations) from scenario 2 are closer to the IGS solution compared to those resulting from scenario 1.
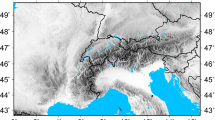
As an example, the EW and NS hydrostatic gradients estimated from the NWP model at ALGO over the month of July 2007 are presented in Fig. 4a and b, respectively. Rapid changes of hydrostatic gradients are likely to be a result of the existence of low or high pressure systems around the investigated location. By taking a closer look at Fig. 4b one can notice, for example, a rapid change of NS hydrostatic gradient from about −0.5 to 0 mm during 19–20 July (DoY 200.5 to 201.5) at station ALGO. Surface weather maps for 19 and 20 July 2007 show the passage of a cold front from north to south and a low pressure system near the location of ALGO, which are likely to be partly responsible for the NS gradient on that day. The thickness of the atmosphere between the 500 and 1,000 hPa isobaric levels (hereafter referred to as thickness) and mean sea level (MSL) pressure maps produced using the Meteorological Service of Canada regional NWP model are presented in Figs. 5 and 6. Features in thickness and MSL pressure maps may be more correlated with hydrostatic gradients than features in surface weather maps. As can be seen in Fig. 5a, during DoY 200, the thickness is changing in an NS direction near the location of ALGO. Furthermore a low MSL pressure area exists at this location while a higher pressure area is located toward the north of the station (see Fig. 5b). These are likely to be the reason for the considerable NS gradient at ALGO. During DoY 201, however, the edge of thickness change moves further to the south (see Fig. 6a) and a low pressure system moves to the east of ALGO (see Fig. 6b) resulting in a slightly increased EW hydrostatic gradient which has been quantified by the gradient estimation algorithm and can be seen in Fig. 4a.

a Thickness and b MSL pressure maps produced using the Meteorological Service of Canada regional NWP model on DoY 200.5, 2007

a Thickness and b MSL pressure maps produced using the Meteorological Service of Canada regional NWP model on DoY 201.5, 2007
The effect of these gradients on daily estimated coordinates and 2-h ZTD estimates can be seen in Figs. 7, 8 and 9. Figure 7a shows the correlation between latitude differences resulting from scenarios 3 and 2 (processing with and without hydrostatic gradients) and the magnitude of hydrostatic gradients. Figure 7b shows correlation between latitude differences and NS hydrostatic gradients. Figures 7c and d show the correlations with longitude and height component differences, respectively. It is clear from Fig. 7b that there is a strong correlation between NS hydrostatic gradients and latitude differences. No such correlation exists with EW hydrostatic gradients as can be seen in Fig. 8a–c. Regarding ZTD differences, one can see in Fig. 9a–c that NS gradients have a higher correlation with ZTD differences than EW gradients and magnitudes at this station, although this is much lower than the latitude correlation shown in Fig. 7b.

Absolute coordinate component differences between scenarios 2 and 3 versus absolute mean daily hydrostatic gradients at station ALGO over the month of July 2007: a gradient magnitude versus latitude; b NS gradient versus latitude; c NS gradient versus longitude; d NS gradient versus height

Absolute coordinate component differences between scenarios 2 and 3 versus absolute mean daily EW hydrostatic gradients at station ALGO over the month of July 2007: a latitude; b longitude; c height

Absolute ZTD differences between scenarios 2 and 3 versus absolute hydrostatic gradients at station ALGO over the month of July 2007: a magnitude; b NS; c EW
Statistics for all investigated stations are presented in Table 3, which includes correlation coefficients of the estimated daily coordinate absolute differences between scenarios 2 and 3 and absolute mean daily NS and EW hydrostatic gradients. Also included are correlation coefficients of absolute ZTD differences and absolute NS and EW hydrostatic gradients. The significance of all correlation coefficient values has been tested using the following statistic (Spiegel and Stephens 1998)
where r is the sample correlation coefficient, and N is the number of values. The statistic in Eq. 4 has a Student’s distribution with N – 2 degrees of freedom. Correlation coefficients significantly different than zero at a 0.05 significance level, are presented in bold font in Table 3. As can be seen in the table, for all investigated stations there is a significant and strong correlation between NS hydrostatic gradients and latitude differences. For most stations, longitude components have not been affected significantly with the implementation of gradients. The height component and ZTD are also affected but the correlations with implemented gradients are not as strong as those with the latitude, as previously mentioned.
Mean monthly differences between results from the three scenarios and IGS results have also been investigated. The results from all three scenarios agree with the IGS cumulative estimates in all three components at the millimeter level (except for station AREQ whose rather large differences need further investigation). Figures 10, 11, 12 and 13 show the means and standard deviations (SDs) of the estimated parameters from the scenarios (except for station AREQ) and those of the IGS. While in a monthly comparison most of the NWP parameters’ effects might average out, at some stations (namely ALGO, UNBJ, NRC1 and OHI2) the third scenario (NWP with hydrostatic gradients) still caused millimeter level mean latitude differences compared to the other scenarios. This may indicate that hydrostatic gradients can have systematic effects on long term latitude estimates.

Absolute mean and SD of latitude difference between the results of the three scenarios and IGS values

Absolute mean and SD of longitude difference between the results of the three scenarios and IGS values

Absolute mean and SD of height difference between the results of the three scenarios and IGS values

Absolute mean and SD of ZTD difference between the results of the three scenarios and IGS values
Discussion
Estimated parameters from our PPP scenarios show strong correlation between NS hydrostatic gradients and latitude differences at all investigated stations. A 0.5 mm absolute mean daily NS gradient at station ALGO, for example, resulted in about 2 mm latitude difference. Overall, mean ratios of about 4–6 were found between absolute latitude difference and absolute mean daily NS gradient at all investigated stations. Weaker but still significant correlation also exists between NS gradients and height and ZTD. Among the estimated parameters, longitude was the one with least change under implementation of gradients. Although NS and EW hydrostatic gradients are the same order of magnitude, the NS gradients seem to have a systematic behavior. This systematic NS behavior has been quantified by Chen and Herring (1997) using a low resolution NWP model at mid-latitudes and also by Ghoddousi-Fard and Dare (2007) using a dual radiosonde ray-tracing approach over most of the North America.
Monthly averaged estimated parameters show minor change under the different scenarios considered. This change is larger for the latitude component at most stations. The monthly mean latitude results are closer to the IGS values when the third scenario is used (except for the two high latitude stations where the monthly mean NS hydrostatic gradients were close to zero, which resulted in no mean change in latitude). The standard deviations of latitude, height and ZTD differences from IGS values decrease slightly at most stations when the third scenario (NWP with gradients) is used.
Summary and conclusions
Gradients, zenith delays and mapping function values from NWP models have been implemented in scientific GNSS software. The effect of these parameters on a month-long dataset of observations from a number of IGS stations was investigated in three different PPP scenarios, which differ in the a priori hydrostatic slant delay handling. The results show strong correlation between NS hydrostatic gradients and latitude differences with weaker correlation between NS hydrostatic gradients and height component and ZTD differences. It seems that longitude is not sensitive to either of the hydrostatic gradient components. The effect of ZHD and mapping function values from NWP when the gradients are not implemented was only seen on height and ZTD estimates.
Based on the processing results at the investigated stations mean ratios of about 4–6 were found between absolute latitude difference and absolute mean daily NS gradient. For example, a 0.5 mm a priori NS hydrostatic gradient can affect the estimated latitude component by more than 2 mm. Although the effect in terms of absolute maximum value might be larger for height and ZTD, the correlation of those with either gradient component was not as clear as the correlation with latitude. Furthermore, this may partly be due to higher uncertainty in height and ZTD estimations compared to horizontal components. While we have shown that correcting the a priori SD with hydrostatic gradients can have a millimeter level effect in some estimated components, mBernese is capable of considering NWP hydrostatic, non-hydrostatic and total gradients as a priori in GPS observables as well as zenith delay and mapping functions based on NWP models in all processing strategies. Considering such effects on latitude, height and ZTD estimates might be crucial in applications such as long term geodynamics studies, realization of terrestrial reference frames and climate studies and consequential interpretations. The effect of current implementations on different processing strategies and use of higher resolution NWP models in order to investigate the effect of local weather anomalies are among the future works that could be carried out with mBernese.
References
Bar-Sever YE, Kroger PM, Borjesson JA (1998) Estimating horizontal gradients of tropospheric path delay with a single GPS receiver. J Geophys Res 103(B3):5019–5035. doi:10.1029/97JB03534
Beutler G, Bock H, Dach R, Fridez P, Gäde A, Hugentobler U, Jäggi A, Meindl M, Mervart L, Prange L, Schaer S, Springer T, Urschl C, Walser P (2007) Bernese GPS Software Version 5.0. Astronomical Institute, University of Bern, Bern
Bock O, Doerflinger E (2001) Atmospheric modeling in GPS data analysis for high accuracy positioning. Phys Chem Earth 26(6–8):373–383. doi:10.1016/S1464-1895(01)00069-2
Boehm J, Schuh H (2007) Troposphere gradients from the ECMWF in VLBI analysis. J Geod 81(6–8):403–408. doi:10.1007/s00190-007-0144-2
Boehm J, Werl B, Schuh H (2006) Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data. J Geophys Res 111:B02406. doi:10.1029/2005JB003629
Boehm J, Heinkelmann R, Schuh H (2007) Short note: a global model of pressure and temperature for geodetic applications. J Geod 81(10):679–683. doi:10.1007/s00190-007-0135-3
Chen G, Herring TA (1997) Effects of atmospheric azimuthal asymmetry on the analysis of space geodetic data. J Geophys Res 102(B9):20489–20502. doi:10.1029/97JB01739
Davis JL, Elgered G, Niell AE, Kuehn CE (1993) Ground-based measurement of gradients in the “wet” radio refractivity of air. Radio Sci 28(6):1003–1018. doi:10.1029/93RS01917
Ghoddousi-Fard R, Dare P (2006) Comparing various GNSS neutral atmospheric delay mitigation strategies: a high latitude experiment. In: Proceedings ION GNSS 2006, 19th international technical meeting of the Satellite Division of The Institute of Navigation, Fort Worth, pp 1945–1953
Ghoddousi-Fard R, Dare P (2007) A climatic based asymmetric mapping function using a dual radiosonde raytracing approach. In: Proceedings ION GNSS 2007, 20th international technical meeting of the Satellite Division of The Institute of Navigation, Fort Worth, pp 2870–2879
Ghoddousi-Fard R, Dare P, Langley RB (2008) A web-based package for ray tracing the neutral atmosphere radiometric path delay. Comput Geosci. doi:10.1016/j.cageo.2008.02.027
Hobiger T, Ichikawa R, Takasu T, Koyama Y, Kondo T (2008) Ray-traced troposphere slant delays for precise point positioning. Earth Planets Space 60:e1–e4
IERS (2006) IERS Annual Report 2006. Available at http://www.iers.org
IGS (2005) IGSMAIL-5272 Switch the absolute antenna model within the IGS, Mon., 19 December 2005 14:25:53 +0100 (CET)
Iwabuchi T, Miyazaki S, Heki K, Naito I, Hatanaka Y (2003) An impact of estimating tropospheric delay gradients on tropospheric delay estimations in the summer using the Japanese nationwide GPS array. J Geophys Res 108(D10):4315. doi:10.1029/2002JD002214
MacMillan DS (1995) Atmospheric gradients from very long baseline interferometry observations. Geophys Res Lett 22(9):1041–1044. doi:10.1029/95GL00887
Meindl M, Schaer S, Hugentobler U, Beutler G (2004) Tropospheric gradient estimation at CODE: results from global solutions. J Meteorol Soc Jpn 82(1B):331–338. doi:10.2151/jmsj.2004.331
Niell AE (1996) Global mapping functions for the atmosphere delay at radio wavelengths. J Geophys Res 101(B2):3227–3246. doi:10.1029/95JB03048
Peixoto JP, Oort AH (1993) Physics of climate, 3rd edn. American Institute of Physics, New York
Saastamoinen J (1973) Contributions to the theory of atmospheric refraction, part II: refraction corrections in satellite geodesy. Bull Geod 107:13–34. doi:10.1007/BF02522083
Schmid R, Rothacher M, Thaller D, Steigenberger P (2005) Absolute phase center corrections of satellite and receiver antennas. Impact on global GPS solutions and estimation of azimuthal phase center variations of the satellite antenna. GPS Solut 9(4):283–293. doi:10.1007/s10291-005-0134-x
Schueler T, Hein GW, Eisfeller B (2001) A new tropospheric correction model for GNSS navigation. In: Proceedings of GNSS 2001, V GNSS international symposium, Spanish Institute of Navigation, Seville. Available at http://forschung.unibw-muenchen.de
Spiegel MR, Stephens LJ (1998) Schaum’s outline of theory and problems of statistics, 3rd edn. McGraw-Hill, New York
Teferle FN, Orliac EJ, Bingley RM (2007) An assessment of Bernese GPS software precise point positioning using IGS final products for global site velocities. GPS Solut 11(3):205–213. doi:10.1007/s10291-006-0051-7
Acknowledgments
Environment Canada’s Meteorological Service of Canada and its Canadian Meteorological Centre are thanked for providing data access. We also thank the Atlantic Computational Excellence Network (ACEnet) for providing computing resources. Canada’s Natural Sciences and Engineering Research Council (NSERC) and the Canada Foundation for Innovation are also thanked for providing funds to enable the research reported in this paper to be carried out. We also acknowledge the Royal Institution of Chartered Surveyors Education Trust for financially supporting this research. We thank two anonymous reviewers for their comments that helped to improve this paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ghoddousi-Fard, R., Dare, P. & Langley, R.B. Tropospheric delay gradients from numerical weather prediction models: effects on GPS estimated parameters. GPS Solut 13, 281–291 (2009). https://doi.org/10.1007/s10291-009-0121-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-009-0121-8