
Abstract
In this paper, ionospheric disturbance data from a local GPS network in Hong Kong (low latitude region) are studied in the solar maximum period (2001–2003). The spatial and temporal distributions of the disturbances in Hong Kong are investigated. It is found that strong ionospheric disturbances occur frequently during the solar maximum period, particularly around March and September, and concentrate at the region around geographic latitude 22°N (geomagnetic latitude 12°N). The effects of the disturbances on GPS geodetic receivers, such as loss of lock and measurement noise level, are also analyzed for the 3-year period. It shows that the measurement noise level and the number of losses of lock in GPS data increase dramatically during ionospheric disturbance periods. The behaviors of different types of GPS receivers during the disturbances are also compared.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Ionospheric delay is one of the major error sources in GPS positioning. Conventionally, ionospheric delays on GPS observations can be reduced by using the combination of two radio frequencies, or to some extend, by using ionospheric delay models for single frequency users (Kleusberg 1998). Different ionospheric delay models have been developed (Klobuchar 1986; Coster et al. 1992; Walker 1989). The effects of ionosphere on GPS positioning can be considered in two aspects. Firstly, during strong ionospheric disturbances, conventional models cannot accurately describe the ionospheric delays. Therefore, ionosphere threat models are required to assess possible impact of the disturbances on positioning accuracy, which is an important factor for system integrity (Luo et al. 2004). Secondly, due to the amplitude and phase variations of GPS signals caused by the disturbances, GPS receiver performances are degraded. Frequently, loss of GPS signals can happen during the disturbance periods which are caused by strong solar radiation and geomagnetic field variations. This will affect the availability of GPS positioning.
In lower latitude regions, to precisely model GPS ionospheric delay becomes more difficult. Near the geomagnetic equator, the earth’s magnetic field is horizontal and there is east–west electric field due to the dynamic effect by atmospheric motions. The electric field is eastward during the day and westward during the night. Ionospheric changes at equatorial and low latitude regions are particularly sensitive to these electrodynamic phenomena. As a consequence, ionospheric plasma from equatorial region moves upward and then diffuses downward along sloping magnetic field lines to low latitudes on both sides of the geomagnetic equator. The electron concentration is thus depleted on the geomagnetic equator and enhanced in two regions, which are located approximately north and south 15° of the geomagnetic equator. This introduces a large total electron content (TEC) gradient along latitude on both sides of the equator. Experiments in Hong Kong clearly showed that the ionospheric gradient in the region and the ionospheric delay effects cannot be removed by double difference observables with a baseline even less than 10 km (Chen et al. 2001). Variations in equatorial plasma drifts cause the equatorial ionization anomaly, namely equatorial electron density irregularities. The electron density irregularities cause inhomogeneities in the refractivity of radio frequency signals, which pass through the ionosphere. Rapid random fluctuations of the phase and field strength (amplitude) will appear on the RF signals and the phenomena are known as ionospheric scintillations. Ionospheric scintillation disturbs satellite communications, global positioning navigation systems, radar system performance and radio astronomical observations.
Strong ionospheric disturbances have great impact on the performance of GPS receivers. The effects of ionosphere on GPS receivers have been studied by many researchers (Conker et al. 2003; Hegarty et al. 2001; Aaron and Basu 1994; Nichols et al. 1999; Groves et al. 2000; Skone 2001; Doherty et al. 2000; Chen et al. 2002; Aquino et al. 2005). A special type of GPS receivers has been developed to measure the amplitude and phase scintillations in GPS signals (Van Dierendonck 1999). The theoretical analyses of GPS receiver delay lock loop and phase lock loop performances under ionospheric disturbances have been studied by Conker et al. (2003) and Hegarty et al. (2001) and the results indicate that GPS receivers are particularly vulnerable in low latitude areas, as loss of lock on GPS receiver tracking may happen frequently due to strong disturbances in the region. The performances of GPS receiver under severe magnetic storms in different parts of the world have also been studied based on analyzing GPS observations (Aaron and Basu 1994; Nichols et al. 1999; Groves et al. 2000; Skone 2001; Doherty et al. 2000; Aquino et al. 2005). These studies are mostly concentrated on a few geomagnetic storm events. Systematic study of GPS data over long period of time at locations where ionospheric scintillations occur frequently will be helpful to understand more about the effects of the disturbances on GPS receivers.
Since Hong Kong is located at latitude 22°N (or geomagnetic latitude 12°N), GPS positioning is strongly affected by the low latitude ionospheric disturbances. This paper analyzes the performances of commonly used GPS geodetic receivers in a 3-year period (2001–2003) during the recent solar maximum period. Firstly, we report the observations of ionospheric activity in the period and study the spatial and temporal distributions of the disturbances in Hong Kong using continuous GPS observation. Then the effects of the disturbances on the performance of GPS geodetic receivers are analyzed.
Ionospheric disturbances in Hong Kong, 2001–2003
The ionospheric scintillation can be quantified by the standard deviation and the power spectral density of carrier phase signals (phase scintillation) and the so-called S4 index (amplitude scintillation) (Van Dierendonck 1999). Alternatively, it can also be described by the changes of TEC values (Zhang and Xiao 2003; Pi et al. 1997). In this study, we will use the RMS value of the changes of vertical TEC to quantify the degree of ionospheric disturbances.
The GPS carrier phase observation equations in L 1 and L 2 frequency bands can be expressed as
where φ is the carrier phase, ρ is the distance between satellite and receiver, Δt r and Δt s are receiver and satellite clock errors, respectively, I = 40.3TEC is ionospheric delay term, TEC is the total electron content, N 1 and N 2 are ambiguities, T is the tropospheric delay, λ is the wavelength, and ε is the measurement noise.
The geometry-free combination can then be formed as L 4
Then, the changes of vertical TEC value over time (called DVTEC) can be calculated as
where M is the mapping function and k is a constant.
For example, Fig. 1 shows the DVTEC values on two different days (17 and 19 March 2002) for all satellites observed (in different colors) at one station in Hong Kong. On 17 March, when the strong ionospheric disturbances occurred, the DVTEC values varied very quickly, particularly between 8:00 p.m. and 2:00 a.m. local time (Fig. 1a), indicating strong variations of TEC. On 19 March, the DVTEC values changed relatively smoothly over the whole-day period (Fig. 1b) when the disturbances were not obviously observed.

The DVTEC values on 17 and 19 March 2002 in Hong Kong. a DVTEC values on 17 March 2002, b DVTEC values on 19 March 2002
To quantify the degree of the disturbances, we calculate the RMS value of DVTEC values within 5 min period for all satellites observed, based on the following equation,
where n is total number of observations in 5 min, and μ is the average of DVTEC over the 3-year period (μ = 0.0015 TECU).
Figure 2 illustrates the RMS values of DVTEC for the same 2 days (17 and 19 March 2002). Comparing Figs. 1a and 2a (17 March 2002), the RMS values give a much clearer picture on the peaks of phase disturbances. The strong phase disturbances started around 7:00 p.m. and rested after 2:00 p.m., and there were a number of peaks between 8:00 p.m. and 2:00 a.m., indicating the strong disturbances. When the ionosphere is relatively quiet on 19 March, the RMS values variations are relatively small (Fig. 2b).

The RMS of DVTEC values on 17 and 19 March 2002. a The RMS of DVTEC values on 17 March 2002, b the RMS of DVTEC values on 19 March 2002
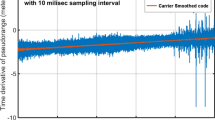
To quantify the phase disturbances due to ionospheric activity over a long period of time, we plot the daily maximum RMS value of DVTEC over 3-year period (2001–2003) at a site HKFN, as shown in Fig. 3. It is shown that the daily maximum RMS values decrease from 2001 to 2003, as the solar activity passed its 11 year peak. Also, we have seen clear semiannual peaks around March and September each year in Fig. 3. The mean of the daily maximum RMS values is 0.0188 TECU over the 3-year period. Based on Fig. 3, we divide the daily maximum RMS values into three levels: (a) no strong phase disturbances (RMS < 0.2 TECU), (b) medium phase disturbances (0.2 TECU < RMS < 0.4 TECU), and (c) strong phase disturbances (RMS > 0.4 TECU). In 2001, for example, there are more than 130 days when the RMS values exceed 0.2 TECU, and more than 70 days when the RMS values exceed 0.4 TECU. This indicates that the ionospheric disturbance is a very serious problem for GPS applications in low latitude region. Figure 4 shows the spatial and temporal distributions of the daily maximum RMS values of the three levels in 2001–2003. When there were no strong phase disturbances (RMS < 0.2 TECU), the daily maximum RMS values were nearly uniformly distributed between latitudes 15–25°, and mostly during daytime. On the other hand, when there are strong disturbances (RMS > 0.4 TECU), the daily maximum RMS values occurred around latitude 22°N where is the center of the north ionospheric equator anomaly zone, and between 8:00 p.m. and 2:00 a.m. when strong TEC variations occurred. Figure 5 shows the vertical TEC values for a 24-h period. It can be seen that in Hong Kong, the TEC distribution has a two-dimensional peak, one dimension is along the local time and another along latitude. The maximum vertical TEC value is also around latitude 22°N.

Daily maximum RMS values of DVTEC in 2001–2003

Spatial and temporal distributions of the daily maximum RMS values

The VTEC distributions in a 24-h period
Performance of GPS receivers in Hong Kong, 2001–2003
In this study, we mainly analyze GPS data from the Hong Kong active network (Chen et al. 2002), which used six Leica CRS1000 receivers. We also deployed a Trimble 4000SSI receiver for a month in March 2002 for comparison purpose. To examine the performance of GPS receivers, we analyze the number of losses of lock of the receivers and the measurement noises in GPS data.
Loss of lock
Loss of lock on satellite can be easily conducted by screening the number of data missing gaps in GPS RINEX data file. We applied a cut-off angle of 15° to avoid receiver signal tracking instability due to lower elevation angles. Figure 6 shows the total number of losses of lock for a Leica CRS1000 receiver for the whole 3-year period at site HKFN. Compared with Fig. 3, it is clearly shown that the number of losses of lock is strongly correlated with the ionospheric disturbances, with the same semiannual peak pattern around March and September each year. When there are no strong phase disturbances, the number of losses of lock are normally less than 50 times per day. However, the number of losses of lock can reach 500 times in a day during strong disturbance periods. During the strong disturbance periods, the receiver could lose up to seven satellites at the same time for periods of a few minutes. This means the positioning capability of GPS was totally lost during the periods.

The total number of losses of lock of a Leica receiver in 2001–2003
As pointed out by Aquino et al. (2005) and Skone (2001), in general, the number of L2 losses of lock is much greater than in L1 during geomagnetic storms. Figure 7 shows the number of losses of lock of a Leica receiver in different frequencies in 2002. It can be seen that most losses of lock are on L2 frequency. On the other hand, the number of losses of lock on L1 frequency is also increased during the strong disturbance periods. When the disturbances were strong, the number of losses of lock on L1 can reach 50 times per day, whereas when the ionosphere was quiet, loss of lock on L1 occurred only a few times each day.

The number of losses of lock on L1 and L2 for a Leica receiver in 2002
Measurement noise
We use the following combination (N6, see Eq. 6) to analyze measurement noise of GPS receivers, because all geometric and ionospheric terms cancel in N6 which is the combination of measurement noises of four GPS measurements from the same satellite (two carrier phase and two pseudorange measurements) and the biases (i.e., ambiguities and channel biases).
The time difference of N6 removes all the biases in N6, and therefore, only contains the noise combination of eight measurements from two epochs, primarily contributed by the pseudorange noises.
Figure 8 shows DN6 values for all satellite observed on 17 and 19 March 2002, respectively. It can be seen that the noise level on 17 March 2002 increased dramatically between 8:00 p.m. and 2:00 a.m. local time, when there were strong ionospheric disturbances (see Figs. 1a, 2a). In other periods of the day, the noise levels were confined in a small band. On 19 March, when the disturbance was not obvious, DN6 values were mostly within a small band.

DN6 values for all satellites on 17 and 19 March 2002. a DN6 values for all satellites on 17 March 2002, b DN6 values for all satellites on 19 March 2002
We then plot the daily maximum DN6 values for the year 2002, as shown in Fig. 9. It can be seen that when the ionosphere is relatively quiet, the daily maximum DN6 values are around 15 cm. However, around March and September when the disturbances were strong, the daily maximum values can reach up to 80 cm.

The daily maximum DN6 values of a Leica receiver in 2002
The standard deviation of DN6 for the 3-year period is σ = 0.008 m. For GPS positioning, we are more concerned about situations when the noise levels exceed the mean value. In this study, we try to count the number of times in a day when the DN6 values were larger than 3σ. The results are shown in Fig. 10 for the 3-year period using data from site HKFN. On average, the number of measurements with DN6 values which were larger than 3σ values were less than 100. Comparing Figs. 10 and 3, the number of measurements exceeding 3σ are also strongly correlated with ionospheric disturbances. In the strong disturbance periods, the number of measurements exceeding 3σ can reach more than 2000. This, in turn, will significantly affect GPS positioning accuracy.

The frequency of DN6 values exceed three times of standard deviation
The ionospheric disturbances affect not only pseudorange but also carrier phase measurements (Aquino et al. 2005). To analyze the measurement noise of carrier phase, we need to reduce other error sources as much as possible. In this study, we use double differencing to remove clock related errors and use the ionosphere-free combination to remove first-order ionospheric effects. Figure 11 shows the double difference residuals of carrier phase ionosphere-free combination for a baseline between HKFN and HKPU (∼21 km) on 17 and 19 March, 2002. For a day’s average, the double difference residual RMS values of 18.3 mm and 17.7 mm on 17 and 19 March, respectively did not differ much, although when the strong disturbances occurred (17 March) the RMS value was slightly larger. On the other hand, during the strong scintillation period (8:00 p.m.–2:00 a.m., 17 March), the RMS residuals reached 25 mm, increasing more than 7 mm compared with the ionospheric quiet period. On 19 March when the ionosphere was relatively quiet, the RMS residual during 8:00 p.m.–2:00 a.m. was similar to the whole-day RMS value. Thus, the ionospheric disturbances affect carrier phase measurements not only by means of cycle slips and loss of lock, but also by increasing measurement noise level.

GPS double difference residuals of a 21-km baseline on 17 and 19 March 2002. a Double difference residuals on 17 March 2002, b) double difference residuals on 19 March 2002
Performance of different GPS receivers
In the Hong Kong GPS active network, there were six stations equipped with Leica CRS1000 receivers. We first examine the performance of the same type of receivers under the ionospheric disturbances. We have calculated the daily maximum RMS values of DVTEC for all six stations, similar to Fig. 3. Then the correlation coefficients of daily maximum RMS values of DVTEC between any two stations are calculated. It is found the correlation coefficients of daily maximum RMS values of DVTEC between different receivers are larger than 0.99. This indicates that the GPS phase changes measured among these six receivers are very comparable. Figure 12a and b show the number of losses of lock with two Leica CRS 1000 receivers at two different sites in 2003. We can see from the figures that the numbers of losses of lock of the two receivers are also quite similar.

Number of losses of lock at different stations at HKFN and HKSC in 2003. a Number of losses of lock at HKFN station, b number of losses of lock at HKSC station
Two different types of receivers were also used in this study (Trimble 4000SSI and Leica CRS 1000) during March 2002 for a whole month. The receivers behaved significantly different during strong disturbance periods. Figure 13 shows the phase changes (DVTEC) for both receivers on 17 March 2002 when there were strong ionospheric disturbances. The amplitudes of the phase change for the Trimble receiver were mostly within 0.5 TECU (Fig. 13b). For the Leica receiver, the range of DVTEC changes was much larger, with in a band of 1.5 TECU for the same period (Fig. 13a). Figure 14 shows the satellite tracks in the period of 8:00 p.m.–2:00 a.m. when the disturbances were strong. The gaps along the tracks indicate losses of lock. Comparing Fig. 14a and b in detail, we find that, although there were many losses of lock on both receivers, the lengths of losses of lock for the Leica receiver were shorter than that of the Trimble receiver. This may be explained by differing carrier tracking loop implementation and smoothing algorithms for the two types of GPS receivers. If the bandwidth of the tracking loop is wider, there should have fewer losses of lock, but larger measurement errors.

Change of ionospheric delays of two different types of GPS receivers on 17 March. a Leica CRS 1000, b Trimble 4000SSI

Losses of lock of two different types of GPS receivers on 17 March. a Leica CRS1000, b Trimble 4000SSI
Discussions and conclusions
In this paper, we have analyzed 3 years of GPS observations at low latitudes during the recent solar maximum period. We have found that the ionospheric disturbances occur frequently at low latitude region and that GPS receiver performances can be significantly degraded during periods of the disturbances. Based on the study, we may draw the following conclusions.
-
1.
Ionospheric disturbances frequently happen in low latitude region, which has serious implications on GNSS application in the region. In 2001, when solar activity reached its peak, the disturbances were observed more than a third of a year in Hong Kong.
-
2.
The most severe disturbances occurred in the region around latitude 21°N in Hong Kong which is the center of the ionospheric equatorial anomaly zone, and during the period of after sunset (8:00 p.m.–2:00 a.m. local time). There are semiannual peaks around March and September when the disturbances are particularly strong.
-
3.
GPS receiver performance can be severely affected by the ionospheric disturbances. The number of losses of lock increase dramatically during strong disturbance periods. The number of losses of lock for Leica CRS receiver is less than 50 per day when the ionosphere is relatively quiet, but can reach up to 500 per day when strong disturbances occur. Most of losses of lock are on L2 frequency. On the other hand, there are around 50 losses of lock on L1 per day during strong disturbance periods.
-
4.
The pseudorange measurement noise increases significantly during ionospheric disturbance periods. In the quiet periods, the number of measurement noises greater than 3σ of the 3-year average is around 100 (out of a total of 140,000 measurements) per day. However, more than 2,000 measurement noises can be larger higher than 3σ when the disturbances are strong. This will significantly affect the GPS positioning accuracy.
-
5.
Aquino et al. (2005) tried to investigate the ionospheric disturbances on GPS carrier phase positioning with L1 data. It was found that the positioning errors are correlated with the ionospheric activity. We find in this study that the disturbances also cause the increase of carrier phase measurement noise level. For the ionosphere-free combination, the noise level of carrier phase measurements can increase more than a third of the normal situation.
-
6.
We compared different receiver performances under ionospheric disturbances. For the same type of receivers, the receiver performances under disturbances are quite similar. On the other hand, different types of GPS receivers behave differently under the disturbances, which are related to the hardware and firmware of the receivers. This finding also indicates that the measured phase changes during the disturbance periods do not fully represent to phase changes due to ionosphere scintillation caused by the disturbances. Also, in areas where the disturbances occur frequently, such as in low latitude regions, the signal bandwidth of GPS receiver should be enlarged to reduce the number of losses of lock.
References
Aaron J, Basu S (1994) Ionospheric amplitude and phase fluctuations at the GPS frequencies. ION GPS94, Salt Lake City, pp 1569–1578
Aquino M, Moore T, Dodson A, Waugh S, Souter J, Rodrigues FS (2005) Implications of ionospheric scintillation for GNSS users in Northern Europe. J Navig 58(2):241–256
Chen W, Hu C, Chen Y, Ding X, Kowk SC (2001) Rapid static and kinematic positioning with Hong Kong GPS active network. ION GPS 2001, Salt Lake City, Utah, USA, pp 346–352
Chen W, Hu C, Ding X, Chen Y, Kowk SC (2002) Critical issues on GPS RTK operation using Hong Kong GPS active network. J Geospatial Eng 4(1):31–40
Conker RS, El-Arini MB, Hegarty CJ, Hsiao T (2003) Modeling the effects of ionospheric scintillation on GPS/satellite-based augmentation system availability. Radio Sci 38(1):1001. doi:10.1029/200RS002604
Coster AJ, Gaposchldn EM, Thornton LE (1992) Real-time ionospheric monitoring system using GPS. Navig J Inst Navig 39(2):191–204
Doherty P, Delay S, Valladares C, Klobuchar J (2000) Ionospheric scintillation effects in the equatorial and auroral regions. ION GPS 2000, Salt Lake City, Utah, pp 662–671
Groves KM, Basu S, Quinn JM, Pedersen TR, Falinski K, Brown A, Silva R, Ning P (2000) A comparison of GPS performance in a scintillation environment at Ascension Island. ION GPS 2000, Salt Lake City, Utah, pp 672–679
Hegarty C, El-Arini MB, Kim T, Ericson S (2001) Scintillation modeling of GPS wide area augmentation system receivers. Radio Sci 36(5):1221–1231
Kleusberg A (1998) Atmospheric models from GPS, GPS for geodesy, 2nd edn. Springer, Wien, pp 599–624
Klobuchar JA (1986) Design and characteristics of the GPS ionospheric time delay algorithm for single-frequency users. PLANS-86, Las Vegas, NV, November 1986, 280–286
Luo M, Pullen S, Ene A, Qiu D, Walter T, Enge P (2004) Ionosphere threat to LAAS: updated model, user impact, and mitigations. ION GNSS 2004, Long Beach, CA, 2771–2785
Nichols J, Hansen A, Walter T, Enge P (1999) High latitude measurements of ionospheric scintillation using NSTB. ION technical meeting, San Diego, CA, pp 789–798
Pi X, Mannucci AJ, Lindqwister UJ, Ho CM (1997) Monitoring of global ionospheric irregularities using the worldwide GPS network. Geophys Res Lett 24(18):2283–2286
Skone SH (2001) The impact of magnetic storms on GPS receiver performance. J Geod 75(6):457–468
Van Dierendonck AJ (1999) Eye on the ionosphere: measuring ionospheric scintillation effects from GPS signals. GPS Solution 2(4):60–63
Walker JK (1989) Spherical cap harmonic modeling of high latitude magnetic activity and equivalent sources with sparse observations. J Atmos Terres Phys 51(2):67–80
Zhang DH, Xiao Z (2003) Study of the ionospheric total electron content response to the great flare on 15 April 2001 using international GPS service network for a whole sunlit hemisphere. J Geophys Res 108(A8):1330. doi:10.1029/2002009822
Acknowledgments
This study is under the support by the Hong Kong RGC projects: PolyU 5075/01E and PolyU 5062/02E. It is also partially supported by the Chinese National Nature Science Foundation (No. 40474067).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Chen, W., Gao, S., Hu, C. et al. Effects of ionospheric disturbances on GPS observation in low latitude area. GPS Solut 12, 33–41 (2008). https://doi.org/10.1007/s10291-007-0062-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-007-0062-z