
Abstract
We developed a new system to monitor and forecast coastal and open-ocean states around Japan for operational use by the Japan Meteorological Agency. The system consists of an eddy-resolving analysis model based on four-dimensional variational assimilation and a high (2-km) resolution forecast model covering Japanese coastal areas that incorporates an initialization scheme with temporal and spatial filtering. Assimilation and forecast experiments were performed for 2008 to 2017, and the results were validated against various observation datasets. The assimilation results captured well the observed variability in sea surface temperature, coastal sea level, volume transport, and sea ice. Furthermore, the volume budget for the Japan Sea was significantly improved by the use of the 2-km resolution forecast model compared with the 10-km resolution analysis model. The forecast results indicate that this system has a predictive limit longer than 1 month in many areas, including in the Kuroshio current area south of Japan and the southern Japan Sea. In the forecast results of case studies, the 2017 Kuroshio large meander was well predicted, and warm water intrusions accompanying Kuroshio path variations south of Japan were also successfully reproduced. Sea ice forecasts for the Sea of Okhotsk largely captured the evolution of sea ice in late winter, but sea ice in early winter included relatively large errors. This system has high potential to meet operational requirements for monitoring and forecasting ocean phenomena at both meso- and coastal scales.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The ocean state in coastal and offshore regions is strongly influenced by both large-scale ocean circulation and mesoscale eddy activity (on scales of about 100 to 1000 km). In the western North Pacific, considered at basin scale, the Kuroshio, the western boundary current of the subtropical circulation, flows from the south, and the Oyashio, the western boundary current of the subarctic circulation, flows from the north, and they join in a confluence region to the east of Japan (Kuroshio/Oyashio confluence region). This confluence results in energetic mesoscale variability in the Kuroshio Extension region (e.g., Qiu and Chen 2010; Fig. 1). South of Japan, the Kuroshio typically follows one of three paths (Kawabe 1995): the typical large meander path (tLM), offshore nonlarge meander path (oNLM), and nearshore nonlarge meander path (nNLM) (Fig. 1c). Variations of the Kuroshio associated with path transitions have large impacts on the ocean state not only in the open ocean but also in coastal regions. Moreover, various coastal currents flow around Japan: the Tsushima Warm Current, which consists of warm, saline Kuroshio water, flows from the East China Sea into the Japan Sea, and the Tsugaru Warm Current and Soya Warm Current flow out of the Japan Sea into the North Pacific and the Sea of Okhotsk, respectively.

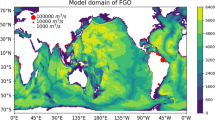
a Schematic overview of the MOVE/MRI.COM-JPN system. Data assimilation is performed by the G3-3DVAR and NPR-4DVAR analysis models. The forecast model, MRI.COM-JPN, is composed of GLB, NP, and JPN models coupled by 2-way online nesting and is initialized by the incremental analysis updates (IAU) scheme. Temperature and salinity fields output by G3-3DVAR are used in the calculation of the increments for initialization of GLB, and those output by NPR-4DVAR are used in the calculation of the increments for initialization of NP and JPN. Bottom topography: b NPR-4DVAR and c JPN. The black lines in b divide the North Pacific into the subregions used in the calculation of T–S EOF modes
Human socioeconomic activities related to the ocean, such as fisheries, ship navigation, and tourism, are greatly affected by coastal ocean variability (e.g., tidal effects). Recently, the coastal environment and human activities in coastal areas have suffered from rising water temperatures and sea levels due to global warming, as well as from severe disasters caused by extreme storm surges and significant wave heights. Thus, there is a high demand for these phenomena to be monitored and predicted with high accuracy (e.g., IPCC 2014). There is also a social demand for accurate prediction of the drifting of sea ice in the Sea of Okhotsk to the coast of Hokkaido, but only a few modeling studies have dealt with sea ice processes in the Sea of Okhotsk specifically (e.g., Watanabe et al. 2004; Fujisaki et al. 2007).
In coastal regions around Japan, such as the region south of Japan, frontal waves propagating along the Kuroshio have sometimes caused sudden temperature rises and strong currents in coastal waters (e.g., Isobe et al. 2010, 2012; Takahashi et al. 2012; Kuroda et al. 2013; Katusumata 2016) that have damaged fisheries by killing cultured fish and damaging fishing gear. Furthermore, sea level along the Pacific coast of southern Japan is strongly influenced by Kuroshio path variations (Kawabe 1987). Therefore, the impacts of both mesoscale and coastal phenomena must be considered to understand coastal ocean variations around Japan.
Although nearly 4000 globally distributed Argo floats and satellite measurements are currently being used to capture mesoscale ocean phenomena, and in particular, our knowledge of oceanic mesoscale phenomena has been greatly advanced through the use of satellite altimeter measurements, the density of observations is insufficient to capture such influential coastal phenomena occurring around Japan. Moreover, in coastal regions, because of the influence of nearby land areas, the accuracy of satellite retrievals is generally low. In addition, in situ observations, which are made at only a few fixed points in coastal areas around Japan, are limited both spatially and temporally. Coastal phenomena can be monitored by using current velocity observations made by high-frequency ocean radar (e.g., Hinata et al. 2005; Ramp et al. 2008), but observation coverage is limited to specific areas (Fujii et al. 2013).
Under the insufficient observation condition, it is of value to reproduce the ocean state by dynamical modeling using data assimilation to take advantage of existing ocean observations. For example, ocean data assimilation and prediction systems are routinely used in operational centers such as the Japan Meteorological Agency (JMA). Operational ocean systems using data assimilation methods targeting the area around Japan have generally focused on mesoscale phenomena such as the Kuroshio and Oyashio currents (Usui et al. 2006a, 2015, 2017; Miyazawa et al. 2009; Kuroda et al. 2017), but recent efforts to resolve smaller scale coastal phenomena with high-resolution models for operational use have produced remarkable results (Sakamoto et al. 2016; Varlamov et al. 2015; Kuroda et al. 2018). Sakamoto et al. (2016) and Kuroda et al. (2018), however, used regional models that covered only specific regions in southern Japan, whereas Varlamov et al. (2015) modeled tidal forcing with high resolution in a domain that included all of Japan, but the model did not incorporate sea ice processes.
Data assimilation schemes that take into consideration information on observation times, such as four-dimensional variational (4DVAR) methods, can effectively represent short-term variation (Usui et al. 2015), although they require huge computing resources. Usui et al. (2015) developed a coastal monitoring and forecasting system consisting of an eddy-resolving assimilation model with 4DVAR assimilation and a high-resolution coastal model that is initialized by the 4DVAR analysis field. Then, using this system, they successfully reproduced an anomalous sea level rise event in the Seto Inland Sea. The coastal system has been used quasi-operationally by the JMA since 2016. For fully operational use by the JMA, we have newly developed a high-resolution ocean modeling system that adopts the initialization framework developed by Usui et al. (2015) and covers the whole region around Japan. We call this new system MOVE/MRI.COM-JPN, because it combines the Meteorological Research Institute Community Ocean Model (MRI.COM; Tsujino et al. 2017) with the MRI Multivariate Ocean Variational Estimation system (MOVE; Usui et al. 2006a).
The purposes of this paper are to describe the components and settings of MOVE/MRI.COM-JPN and to demonstrate its performance. The system components, including the ocean model and the data assimilation scheme, are described in Section 2. Section 3 presents the statistical validation results for the system that demonstrate its ability to reproduce observation data. Several indices are used to evaluate the system’s forecast skill for operational work in Section 4. In Section 5, the performance of the system in reproducing events since 2004, including the 2017 Kuroshio large meander event and sudden warm water intrusions associated with Kuroshio path variations, is described. Finally, Section 6 is a summary and discussion.
2 The MOVE/MRI.COM-JPN system
MOVE/MRI.COM-JPN comprises two separate models. The first, MRI.COM-JPN, is a forecast model composed of a nested set of global (GLB), North Pacific (NP), and Japanese coast (JPN) models with state-of-the-art numerical schemes. The second, NPR-4DVAR, is an analysis model that uses a North Pacific model with a reduced grid configuration compared to the NP model in the forecast model, to assimilate data by a 4DVAR method; the analysis model is nested within a global three-dimensional variational (3DVAR) system (G3-3DVAR). In addition, MOVE/MRI.COM-JPN incorporates an initialization scheme that initializes the forecast model by using analysis model results to represent actual oceanic variations. An overview of MOVE/MRI.COM-JPN is shown in Fig. 1; the terminology used to describe the system and its components are summarized in Table 1, and the abbreviations are summarized in the Appendix.
In the following subsections, each component of MOVE/MRI.COM-JPN is described and the experimental settings are given.
2.1 Forecast model: MRI.COM-JPN
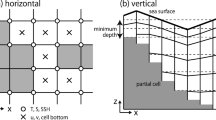
The forecast model is based on MRI.COM version 4.5 (Tsujino et al. 2017), which is the ocean general circulation model developed by MRI. MRI.COM-JPN is described in detail, and its performance is documented, by Sakamoto et al. (2019). The schemes and settings used by MRI.COM-JPN are listed in Table 2. MRI.COM is a free surface, depth-coordinate model that solves the primitive equations under hydrostatic and Boussinesq approximations. A vertically rescaled height coordinate system, first adopted in MRI.COM version 4.0, allows the minimum bottom depth to be set to 8 m. In MRI.COM-JPN, GLB is coupled to NP, and NP to JPN, by two-way online nesting. The JPN model domain extends from 117 ° E to 160 ° E longitude and from 20°N to 52 ° N latitude (Fig. 1c) with a horizontal resolution of about 2 km (1/33 ° × 1/50°). The NP model domain is from 99 ° E to 75 ° W longitude and from 15 ° S to 63 ° N latitude with a horizontal resolution of about 10 km (1/11 ° × 1/10°). Each model has 60 vertical levels, the thickness of which increases from 2 m at the surface to 700 m at the ocean bottom. The second-order moments scheme of Prather (1986) is used for tracer advection. A multicategory sea ice model with a single layer sea ice and snow cover is coupled to MRI.COM-JPN. The sea ice model comprises thermodynamic and dynamic components. The thermodynamic component is based on Mellor and Kantha (1989), and the dynamic component is based on the Los Alamos sea ice model (Hunke and Dukowicz 1997, 2002). In MRI.COM-JPN, explicit barotropic tidal forcing of the eight main tidal constituents (M2, S2, N2, K2, O1, K1, P1, and Q1), developed by Sakamoto et al. (2013), and atmospheric forcing of sea level pressure (SLP) causing sea level depression or suction are applied to improve the reproductivity of sea level variation in coastal areas.
2.2 Analysis model and data assimilation
2.2.1 NPR model
The NPR model used in NPR-4DVAR is based on MRI.COM version 4.0, which is basically the same as the version 4.5 model used as the basis of the forecast model, although a part of the scheme differs due to the development of tangent linear and adjoint codes required for performing the 4DVAR assimilation. The model domain of the NPR model is the same as that of the NP model (99 ° E–75 ° W, 15 ° S–63 ° N, Fig. 1b), but to reduce computing costs, the horizontal resolution of the NPR model is variable: 1/5 ° – 1/7 ° – 1/11°zonally and 3/10 ° – 1/6 ° – 1/10° meridionally. The horizontal resolution within the JPN model domain of the NPR model is the same with that of the NP model (1/11o × 1/10o). The NPR model uses the QUICK tracer advection scheme (Leonard 1979). Different from the forecast model, explicit tidal forcing and depression/suction by SLP are not incorporated in the NPR model. Boundary conditions of the NPR model are given by the G3-3DVAR global analysis model through one-way offline nesting. The resolution and model domain of G3-3DVAR are the same as those of the GLB model in MRI.COM-JPN.
The tangent linear and adjoint codes of MRI.COM version 4.0 used in the NPR model were generated manually and updated from those of MRI.COM version 2.4, which are used in conventional MOVE-4DVAR (Usui et al. 2015). See Usui et al. (2015) for more detailed descriptions of these codes.
2.2.2 Data assimilation scheme
The data assimilation scheme applied to the NPR model is based on MOVE-4DVAR (Usui et al. 2015), with some modifications. MOVE-4DVAR optimizes the ocean state over the assimilation window by controlling temperature and salinity increments to the initial conditions of the window. The background error covariance matrix is modeled by vertically coupled temperature and salinity (T–S) empirical orthogonal function (EOF) modal decomposition (Fujii and Kamachi 2003) in order to explicitly take into consideration covariance between temperature and salinity of background errors. The main target of NPR-4DVAR is mesoscale phenomena such as mesoscale eddies and meanders of the Kuroshio, which are governed by geostrophic dynamics. Thus, estimation of temperature and salinity fields is essential for realistic representation of mesoscale features. The NPR model domain is divided into 39 subregions (Fig. 1b), and the T–S EOF modes are calculated for each subregion by using historical T–S profiles. The cost function J(z) is defined as follows:
where zl is a control variable composed of amplitudes of the vertical coupled T–S EOF modes, and x is the state vector of the temperature and salinity fields, which is a function of control variable z. The subscripts l and t denote the l-th subregion and the time index, respectively, and the time interval (tI, tF) represents the assimilation window from an initial (I) to a final (F) time. (BH)l and Rt are the horizontal correlation matrix of background errors and the observation error covariance matrix, respectively. The horizontal correlation matrix is modeled by using a Gaussian-like function, and its decorrelation scale is assigned to each subregion according to Kuragano and Kamachi (2000). The last term on the right-hand side, Jc, represents additional constraints, which are used for various purposes such as avoidance of density inversion (Fujii et al. 2005) and excessively cold temperatures below the freezing point (Usui et al. 2011). Vectors \( {\mathbf{y}}_t^{\mathrm{TS}} \) and \( {\mathbf{y}}_t^{\mathrm{SLA}} \) are T–S profile observations and altimeter-derived sea level anomalies (SLAs), respectively, and \( {\boldsymbol{\eta}}_t^{\mathrm{corr}} \) represents corrections applied to the SLA observations. Matrices H and Hh denote spatial interpolation from the model grid to observation locations for T–S and SLA data, respectively, σh is the observation error for the altimeter-derived SLA data, and \( \overline{\mathbf{h}} \) is the mean sea surface dynamic height (SDH). The operator \( \mathcal{H} \) calculates SDH from the T–S field at each observation point using the T–S field state vector x as follows:
where h is the vector consisting of SDH at each horizontal grid point, hi is the i-th component of h, z and zm denote the vertical coordinate and the reference depth for the SDH calculation, T and S are temperature and salinity, p is the pressure, ρs is the surface density, and ρ′ is the density deviation from the reference state (T = 0 ° C and S = 35 psu). Assimilation results are very sensitive to the mean SDH. Specifically, positions of strong currents such as the Kuroshio and its extension are highly dependent on the mean SDH. We, therefore, created the mean SDH for the SLA assimilation by using in situ observation profiles in order to represent a realistic pattern of long-term mean circulation.
As shown by these equations, the observation operator \( \mathcal{H} \) does not take into consideration nonsteric sea level variations. In contrast, observed SLAs include nonsteric signals. To be specific, observed SLAs are decomposed into three components:
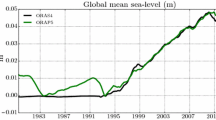
where \( {\boldsymbol{\eta}}_t^{\mathrm{dyn}} \) is dynamic height anomaly, and the nonsteric components consist of \( {\boldsymbol{\eta}}_t^{\mathrm{bt}} \) and \( {\boldsymbol{\eta}}_t^{\mathrm{mass}} \), which represent sea level variations due to the barotropic response to atmospheric forcing and the global ocean mass change, respectively. In NPR-4DVAR, SLA observations are therefore assimilated after exclusion of the nonsteric signals, which are represented by the correction term \( {\boldsymbol{\eta}}_t^{\mathrm{corr}}\left(={\boldsymbol{\eta}}_t^{\mathrm{bt}}+{\boldsymbol{\eta}}_t^{\mathrm{mass}}\right) \) in Eq. 1. In this study, to determine the correction term, we estimated both \( {\boldsymbol{\eta}}_t^{\mathrm{bt}} \) and \( {\boldsymbol{\eta}}_t^{\mathrm{mass}} \). The barotropic response to atmospheric forcing was calculated by using bottom pressure anomalies from a free simulation experiment of the NP model. The sea level variations associated with the global ocean mass change were estimated as follows. First, we calculated dynamic height anomalies \( {\boldsymbol{\eta}}_t^{\mathrm{dyn}} \) from in situ observation-based monthly T–S fields. Then, we determined the misfit (\( {\mathbf{y}}_t^{\mathrm{SLA}}-{\boldsymbol{\eta}}_t^{\mathrm{dyn}} \)) between \( {\mathbf{y}}_t^{\mathrm{SLA}} \) and \( {\boldsymbol{\eta}}_t^{\mathrm{dyn}} \) and averaged the misfit over the globe. We considered this calculated global average to be \( {\boldsymbol{\eta}}_t^{\mathrm{mass}} \) because the global average of \( {\boldsymbol{\eta}}_t^{\mathrm{bt}} \) becomes 0.
The analysis increment Δx for the T–S fields with respect to the background state at the initial time is calculated by
where xb represents the background state, S is a diagonal matrix for standard deviation of background errors, Ul is a matrix composed of dominant T–S EOF modes, Λl is a diagonal matrix for the singular values of the T–S EOF modes, and Wl is a diagonal weight matrix for the l-th subregion. NPR-4DVAR also incorporates the same incremental correction technique as that used in MOVE-4DVAR. The analysis increment Δx is applied to the NPR model field according to that correction technique.
To minimize the cost function, the preconditioned optimizing utility for large-dimensional analyses (POpULar; Fujii 2005) is adopted in the MOVE system. POpULar is based on a nonlinear preconditioned quasi-Newton method and can minimize a nonlinear cost function without inversion of a nondiagonal background error covariance matrix.
2.3 Initialization of the forecast model by an incremental analysis updates scheme with temporal–spatial filtering
In MOVE/MRI.COM-JPN, the initialization of the forecast model is carried out by using the T–S fields of the analysis model and an incremental analysis updates (IAU, Bloom et al. 1996) method together with temporal–spatial filtering as follows:
where
Operator \( {\mathcal{M}}_t \) denotes a nonlinear model, xt is the state vector at time t, and \( \varDelta {\mathbf{x}}_t^{\mathrm{IAU}} \) is the IAU correction term, which is applied during the initialization period (here, IAU period) from ts to ts + L, where ts and L are the initial time and duration of the IAU period. Vectors \( {\overline{\overline{\mathbf{x}}}}_{t_{\mathrm{s}}+L/2}^{\mathrm{F}} \) and \( {\overline{\mathbf{x}}}_{t_{\mathrm{s}}+L/2}^{\mathrm{A}} \) denote daily mean fields of the forecast and analysis models, respectively, at time ts + L/2 corresponding to the center of the IAU period. An overbar indicates the simple average, and a double overbar indicates temporal–spatial filtering. The operator Wh represents the spatial filter, and the temporal filter is accomplished by taking the weighted average using \( {W}_k^t \) during [−nd/2, nd/2], where nd is the number of steps in 1 day. HAF(HFA) is the grid transformation from the analysis (forecast) model to the forecast (analysis) model. The weight parameter g′t is constant during the IAU period.
Here, the initialization of the JPN model by NPR-4DVAR is explained with reference to Fig. 2. First, NPR-4DVAR cycles are conducted, and daily T–S analysis fields are output. Next, the JPN model is integrated without the correction term until the middle of the IAU period (Prepare-run), when the temporal and spatial filters are applied to the JPN model results. The JPN model increment is obtained by taking the difference of the T–S fields between the JPN model and NPR-4DVAR (Eq. 7). First, the JPN model is interpolated to the NPR-4DVAR grid (HFA in Eq. 7); then, after the difference is calculated, the result is interpolated back to the JPN model grid (HAF in Eq. 7). Finally, starting from the same initial conditions as Prepare-run, Eq. 6 is integrated over the entire IAU period with adding the increment of Eq. 7 (IAU-run). Note that the T–S correction of the JPN model is performed under the assumption that the analysis T–S fields of NPR-4DVAR are correct. NPR-4DVAR is used to initialize the NP and JPN models, and G3-3DVAR is used to initialize the GLB model (Fig. 1a).

Schematic overview of the NPR-4DVAR analysis cycle and the JPN-IAU cycle initialized by the IAU scheme with increments corrected against the NPR-4DVAR output. The forecast experiment, JPN-fcst, uses the initial conditions produced by assimilation experiment (JPN-IAU) cycles (see Section 2.5)
In MOVE/MRI.COM-JPN, temporal and spatial filters are applied in the calculation of the T–S increments for the JPN model as shown in Eq. 8. This application takes into consideration the differences in model physics and resolution between the JPN and NPR models. The JPN model explicitly represents tidal and SLP effects, in contrast to the analysis model, which does not represent such effects, and it has a finer horizontal resolution (about 2 km). To reduce errors derived from these differences, we implemented the temporal and spatial filters as low-pass filters.
A nonrecursive Lanczos filter is used as the temporal filter. In the Prepare-run, the time integration is performed by multiplying the T–S fields by the weight coefficient of the temporal filter to calculate daily mean fields on the analysis target day in the middle of the IAU period. For example, if the IAU period is set to 5 days, daily mean fields on the third day are obtained by application of the temporal filter to the model fields during the Prepare-run. Figure 3 compares temperature increments in the JPN model with and without application of the temporal filter. In the snapshot field obtained without the temporal filter, that is, when \( {\mathbf{x}}_{t_{\mathrm{s}}+L/2}^{\mathrm{F}} \) is used in Eq. 7 instead of \( {\overline{\overline{\mathbf{x}}}}_{t_{\mathrm{s}}+L/2}^{\mathrm{F}} \), striped increment structures due to internal tides generated along the north–south-oriented Izu–Ogasawara Ridge appear (Fig. 3a). In contrast, when the increment is calculated with application of the temporal filter, the striped structures are successfully eliminated (Fig. 3b) but the mesoscale structures remain. Hence, applying an appropriate temporal filter will make it possible to correct the mesoscale variability without canceling the tidal variation expressed in the JPN model. The temporal filter is used in all of the forecast models (GLB, NP, and JPN).

JPN-IAU temperature increment at 600-m depth: a snapshot field obtained without application of the temporal filter and b increments obtained after application of the temporal filter. Gray contours show bottom depths of 2000, 3000, and 4000 m
The spatial filter is based on a two-dimensional horizontal Gaussian filter with a radius of 5 km. It is applied to the T–S fields of the JPN model after the temporal filter has been applied. We confirmed that after the spatial filter was applied, the power spectrum of water temperature variation in the zonal direction in the JPN model had a slope similar to that of the power spectrum in the NPR model (not shown).
2.4 Sea ice assimilation
We implemented a scheme to assimilate sea ice concentration (SIC) data in MOVE/MRI.COM-JPN. The SIC assimilation, based on a least square objective analysis and a nudging method (Usui et al. 2010, 2017), is conducted independently of the oceanic assimilation. The SIC analysis value Ca is written by
where Cf is the first guess of the model, Co is the observed value, and K is a weighting coefficient, which is set in the same way as Usui et al. (2017). The sea ice model is nudged to the SIC analysis with a restoring timescale of 1 day.
In this study, sea ice assimilation was applied in the NPR-4DVAR, JPN, and NP models. In trial SIC assimilation experiments using the JPN model, we found that ice temperature sometimes became excessively low when the sea ice volume was changed through the SIC assimilation, and unstable model integration resulted. In the JPN model, we therefore applied some additional treatments to ensure stable model integration. First, sea ice temperature was replaced by the average of the temperature at the ice top and that at the ice bottom. In addition, to prevent conflict between the SIC assimilation and IAU increments, IAU corrections for surface layers shallower than 50 m were discarded when sea ice thickness in the model exceeded 1 m.
2.5 Experiment settings
Using MOVE/MRI.COM-JPN, we performed a set of assimilation and forecast experiments for the period from 2008 to 2017. To shorten computing time for the whole experiment, we divided the assimilation experiment into four streams (2008–2012, 2013–2015, 2016, and 2017), which were carried out separately. Initial conditions of NPR-4DVAR for the four streams were obtained from a long-term single-stream assimilation experiment based on 3DVAR conducted with the NPR model. Boundary conditions were given to the NPR model by G3-3DVAR. The assimilation experiment with NPR-4DVAR was followed by the assimilation experiment (JPN-IAU), in which the JPN model was integrated with the IAU initialization obtained by using the NPR-4DVAR results. For each JPN-IAU stream, we set the spin-up period of a few months, and the model integration was started with initial conditions obtained from a free simulation experiment.
The NPR-4DVAR assimilation window was set to 10 days. Note that neighboring assimilation windows overlap by 5 days (see Fig. 2). In each NPR-4DVAR assimilation window, the first 3 days was set to an initialization period for the incremental correction (Usui et al. 2015), and observation data from the remaining 7 days were utilized for the assimilation. NPR-4DVAR adopts a hybrid 3DVAR–4DVAR approach (Usui et al. 2017), in which 3DVAR analysis is first performed and 4DVAR calculation follows, using the 3DVAR results as the first guess field. The number of iterations in the descent algorithm used for the assimilation was set to 10 in 3DVAR and a maximum of 30 in 4DVAR.
The IAU period in JPN-IAU was set to 5 days, except for cycles that included 29 February; these cycles were set to 6 days, and they used the averaged NPR-4DVAR analysis fields of the 3rd and 4th days. In this paper, the IAU cycles in JPN-IAU were continuous; that is, there was no interval between adjacent IAU cycles. Forecast experiments with the JPN model (JPN-fcst) were subsequently conducted for 30 days in each month of each year from 2008 to 2017 for a total of 120 experiments. The initial conditions of JPN-fcst were obtained from the JPN-IAU results on 1 January, 5 February, 2 March, 1 April, 1 May, 5 June, 5 July, 4 August, 3 September, 2 October, 2 November, and 2 December of each year.
In G3-3DVAR, NPR-4DVAR, and JPN-IAU, each model was driven by 3-hourly atmospheric forcing data from JRA55-do (Tsujino et al. 2018) and by the river discharge data estimated by a land surface model using adjusted JRA-55 precipitation (Suzuki et al. 2017). In JPN-fcst, the 3-hourly wind and SLP analysis data from JMA’s Meso-scale Model (MSM; an operational numerical weather prediction model) and river discharge data (Urakawa et al. 2016) based on the JMA Runoff Index (JMA-RI), which is used operationally by JMA for issuing flood warnings, were used together with JRA55-do data. JRA55-do has a horizontal resolution of about 55 km and the data were linearly interpolated to the ocean-model grids of the NPR and GLB-NP-JPN models. The horizontal resolution of MSM is about 5 km, and the data were linearly interpolated to the JPN model grid. For 2009 to 2017, MSM atmospheric forcing was used in JPN-fcst, but for 2008, when MSM data were not available, JRA55-do atmospheric forcing was used. Note that analysis results, not forecast results, were used as the atmospheric forcing in JPN-fcst, because our motivation for JPN-fcst was to evaluate the forecast skill of MOVE/MRI.COM-JPN given perfect external forcing. For the statistical validation (described in Section 3), daily mean values of ocean model output were used.
Observation data assimilated in NPR-4DVAR were in situ temperature and salinity profiles from depths above 2000 m, satellite-based global daily sea surface temperature (SST), and along-track SLA derived from satellite altimetry. In situ T–S profiles were mainly collected from the World Ocean Database 2013 (Boyer et al. 2013) and Global Temperature and Salinity Profile Program (Hamilton 1994). The Merged satellite and in situ Global Daily Sea Surface Temperature (MGDSST; Kurihara et al. 2006) with 1/4o horizontal resolution produced by JMA was used as the SST dataset. Because data for coastal areas in MGDSST are often extrapolated from the open ocean, we masked grids near coastal and inland seas so those SST data would not be used in the assimilation (Fig. 4). We also modified MGDSST temperatures in sea ice areas to make the SSTs consistent with the sea ice observations used for SIC assimilation. Jason-1/2/3, Envisat, GFO, CryoSat, Altika, HY2A, and Sentilen-3A satellite altimetry observations were used for SLA assimilation. Note that delayed-mode SLA data were used for the period from 2008 to 15 May 2017 and near-real-time mode SLA data were used from 16 May 2017 provided by JMA. We estimated the mean SDH, \( \overline{\mathbf{h}} \), for use in Eq. 1 by averaging monthly SDHs over 1993–2012 obtained from a 3DVAR analysis that used in situ T–S profiles and monthly T–S climatology from the World Ocean Atlas 2013 version 2 (Locarnini et al. 2013; Zweng et al. 2013) as the first-guess of 3DVAR. The mean SDH reference level was set to be area-dependent and varied from 600 to 2000 m.

Grids where MGDSST data were not assimilated in NPR-4DVAR (dark gray). The black dashed line is the 50-m depth contour
For SIC data, we used Defense Meteorological Satellite Program Special Sensor Microwave Imager (SSM/I) sea ice data and manually derived sea ice analysis data produced operationally by the JMA (JMASIA). The SSM/I data are global daily values with a horizontal resolution of 1/4o. JMASIA is produced operationally for the Sea of Okhotsk from mid-November to July, on the 5th, 10th, 15th, 20th, 25th, and the last day of each month, by using visible, infrared, and microwave images acquired by meteorological satellites and visual reports of aircraft of the Japan Maritime/Ground Self-Defense Force and the Japan Coast Guard. JAMSIA has a fine horizontal resolution of 0.05o and classifies SIC into four categories: 1–3, 4–6, 7–8, and 9–10. Daily JMASIA values for dates between the original intermittent analyses are determined by linear interpolation of the data. The JPN model assimilates JMASIA data, whereas the NP model and NPR-4DVAR assimilate SIC data from a merged JMASIA and SSM/I dataset for the Sea of Okhotsk.
3 Statistical validation
3.1 Sea surface temperature
First, we validated the SST field in JPN-IAU against the MGDSST data assimilated in NPR-4DVAR to confirm the consistency of the IAU initialization method applied to the forecast model. Here, we can expect that the bias and RMSE of SST in JPN-IAU relative to MGDSST should be close to those of NPR-4DVAR because the SST field was generally similar between JPN-IAU and NPR-4DVAR. The annual means and standard deviations of MGDSST and SST in JPN-IAU for each year were averaged over the 10 years between 2008 and 2017 (Fig. 5). The results showed that the mean field, particularly its frontal structure, of JPN-IAU was mostly consistent with that of MGDSST; therefore, the assimilation in NPR-4DVAR and the IAU initialization scheme worked consistently. The standard deviations of SST in JPN-IAU also had almost the same spatial distribution and magnitude as those in MGDSST. The SST bias of JPN-IAU relative to MGDSST over the 10-year averaging period in the JPN model domain was slightly positive (about 0.014 °C) (not shown).

Annual mean SST (°C: contours) and its standard deviation (shading) in a MGDSST and b JPN-IAU, averaged over 2008–2017
However, a large cold bias was found in winter (DJF: December, January, and February) in shallow sea areas (e.g., Seto Inland Sea) and inner bays (Ise Bay and Tokyo Bay) in JPN-IAU (Fig. 6a). Therefore, validation was performed by using independent in situ coastal station data. Datasets of daily water temperature were acquired from the Real-time Marine Information Acquisition and Analysis System operated by the Japan Fisheries Research and Education Agency (here called FRA-RMIAS) and the Online Water Quality Monitoring System in Osaka Bay (OSAQAS) operated by the Ministry of Land, Infrastructure, Transport and Tourism Kinki Regional Development Bureau. The former system provides data observed in coastal areas from Kyushu to Sagami Bay on the Pacific Ocean side and Maizuru Bay on the Japan Sea side, and the latter system provides data observed in Osaka Bay. These datasets are independent of those used in the assimilation experiments because they were not assimilated in NPR-4DVAR.

a SST bias (°C) in JPN-IAU relative to MGDSST and buoy observations (color filling the circles and the square) in DJF around southern Japan. Buoy datasets were acquired from FRA-RMIAS (circles) and OSAQAS (square). b Monthly SST climatology in the OSAQAS data (black), JPN-IAU (red), and MGDSST (green) during 2011–2017
The winter (DJF) SST bias between the in situ data from FRA-RMIAS and JPN-IAU was not large, within ±0.5 ° C, at most stations (circles in Fig. 6a). At stations near capes facing the open ocean, the SST bias was close to the bias against MGDSST values around the sites. The same tendency was seen in other seasons (not shown). Moreover, the SST bias in JPN-IAU against the OSAQAS data in Osaka Bay (square symbol in Fig. 6a) was quite small compared with the large cold bias against MGDSST. The monthly SST climatology of the OSAQAS observation, JPN-IAU, and MGDSST in the southern part of Osaka Bay (Fig. 6b) shows that SST in JPN -IAU had a cold bias of about 1 °C against the OSAQAS data in February and March and a warm bias of about 1 °C in summer and autumn, but these biases were smaller than those of MGDSST. Therefore, the SST bias in JPN-IAU was generally smaller than that in MGDSST against the OSAQAS data, especially from winter to spring. This difference in bias is partly attributable to the fact that data from the shallow seas in Japan such as the Seto Inland Sea in MGDSST were not assimilated in NPR-4DVAR (Fig. 4). These results also imply that the large cold SST bias in JPN-IAU against MGDSST seen in other shallow seas and bays may have the same explanation.
To compare the short-term variability of SST, we calculated the SST power spectra in the in situ observation data, JPN-IAU, and MGDSST. Mera and Uchiura stations (Fig. 6a) in Suruga Bay were selected for this investigation. For each dataset, a power spectrum was calculated for each year in which the number of observation days at these stations exceeds approximately 90% of the total number of days in the year, and then the power spectra were averaged (Fig. 7). The power spectra of JPN-IAU and MGDSST were calculated at grid points near the observation stations using the data from the same years that were used to calculate the power spectrum for the observation data. At station Mera, the JPN-IAU power spectrum was similar to that of the observation data in the low- to high-frequency domain (Fig. 7a), but that of MGDSST was quite low compared to the observation data spectrum in the high-frequency domain. Station Mera, on the southeastern side of Suruga Bay near the open ocean, is affected by the Kuroshio path. The consistency of the JPN-IAU power spectrum with that of the observation data indicates that JPN-IAU can realistically express short-term variations such as warm water intrusions from the Kuroshio. In contrast, the low power spectrum of MGDSST in the high-frequency domain is due mainly to the smoothing that results from the optimal interpolation applied to the data. In the high-frequency domain, the JPN-IAU power spectrum at station Uchiura, in northeastern Suruga Bay, is smaller than that of the observation data but larger than the MGDSST spectrum (Fig. 7b); this result suggests that the JPN-IAU performance in northeast Suruga Bay with respect to high-frequency variations is insufficient. This problem may be related to the reproducibility of the circulation in Suruga Bay with the coarse-resolution model used in NPR-4DVAR. In addition, high-pass–filtered SST correlations between JPN-IAU and in situ observations obtained by using 15-day running mean filter were about 0.44 and 0.49 at station Mera and Uchiura, respectively, on average using the same period in Fig. 7 and significant at 95% confidence level. Nonetheless, even though MGDSST was used in the assimilation, JPN-IAU could potentially capture SST variations in the high-frequency domain better than MGDSST.

Power spectra of SST at station a Mera and b Uchiura (see in Fig. 6a). Black, red, and green lines depict the spectra for the observation data (FRA-RMIAS), JPN-IAU, and MGDSST, respectively. At Mera, data used for the calculation were from the years 2009–2011, 2015, and 2016, and at Uchiura, the data were from the years 2009–2010, 2012–2014, 2016, and 2017
3.2 Sea surface height
We compared SSH in JPN-IAU with that of a gridded product with 1/4° horizontal resolution distributed by the Archiving, Validation and Interpretation of Satellite Oceanographic data (AVISO) service and the Copernicus Marine and Environment Monitoring Service (CMEMS) (Mertz et al. 2018). Although along-track sea level anomaly data derived from satellite altimetry were assimilated in NPR-4DVAR, SSH in JPN-IAU was validated to confirm the skill of IAU initialization in reproducing SSH in the open ocean. From the daily data, annual means and standard deviations of SSH for each year from 2008 to 2017 were calculated and averaged (Fig. 8). For the comparison with the AVISO/CMEMS SSH variation, an inverted barometer (IB) correction (ηSLP = − (Plocal − Pglobal)/gρ, where ηSLP is the IB correction term, Plocal and Pglobal are local and global averaged SLP, respectively, g is gravitational acceleration, and ρ is water density) was applied to SSH in JPN-IAU. In addition, the SSH variation in JPN-IAU due to residual tidal components derived from daily averaged semidiurnal and diurnal tides was also corrected (called here the residual tidal correction), although the amplitudes of the tidal components were smaller than the real daily variations.

Annual mean SSH (contours) and its standard deviation (shaded) in a the AVISO/CMEMS product and b JPN-IAU averaged over 2008–2017. Inverted barometer and residual tidal corrections were applied to JPN-IAU for the comparison with the AVISO/CMEMS product. Note that, to make the reference heights match, the contours represent deviations from the averaged SSH over the JPN model domain
The annual average SSH distribution was similar between JPN-IAU and the observation data. The large SSH gradient across the Kuroshio and Kuroshio Extension was also adequately reproduced (Fig. 8). This result indicates that IAU initialization in JPN-IAU works properly, even though the IAU scheme uses the T–S increments and does not directly correct the SSH field. Distribution of the standard deviation for JPN-IAU and the observation data were generally similar, but JPN-IAU showed larger variation in the Kuroshio Extension region, which is the most energetic region in the western North Pacific. This difference was caused by the fact that the AVISO/CMEMS gridded SSH are produced by synthesizing along-track observation data over cycles of 10 days or longer; as a result, they are spatially and temporally smoothed, whereas JPN-IAU, with its 2-km horizontal resolution, can reproduce the original higher frequency variations. Therefore, the SSH fields and its variation in the open ocean were generally well reproduced by JPN-IAU.
Next, to validate the SSH variation in coastal areas in JPN-IAU, we used sea level data observed at tide-gauge stations in Japan, which were not used for data assimilation in NPR-4DVAR. Daily average sea level was calculated from the hourly sea level observation records, and IB and residual tidal corrections were applied to both the daily average and to SSH in JPN-IAU to focus on the reproducibility of the ocean state variation. The SSH values in the model grid closest to each tide-gauge station in JPN-IAU were extracted for comparison. In this comparison, deviations from the annual mean were used in order to match the reference levels between the observations and JPN-IAU. Statistical metrics were calculated for the years in which observation data were available, and their averages are shown in Fig. 9. Note that observations covering more than 5 years were available from about 60% of the tide-gauge stations. The three statistical metrics used in the validation, the standard deviation, capture ratio, and correlation coefficient, are defined as follows:
where xm and xo are sea level in the model and the observation, and N is the sample number. The maximum value of N is the number of days in 1 year (achieved when there are no missing data). The average of the model and observation SSHs for each year were calculated as \( {\overline{x}}_{\mathrm{m}}=\frac{1}{N}{\sum}_{i=1}^N{x}_{\mathrm{m}}(i) \) and \( {\overline{x}}_{\mathrm{o}}=\frac{1}{N}{\sum}_{i=1}^N{x}_{\mathrm{o}}(i) \), respectively; σm and σo denote the standard deviations of the model and observation SSHs, and C and R are the capture ratio and the correlation coefficient, respectively.

a Standard deviation of sea level in JPN-IAU and b the JPN/OBS standard deviation ratio and c capture ratio and d correlation coefficients between sea level in JPN-IAU and tide-gauge observations made at tide-gauge stations around Japan
The SSH standard deviation in JPN-IAU at the tide-gauge stations (Fig. 9a) was large around the Izu Islands, such as Miyakejima (19.0 cm) and Hachijojima (34.3 cm), where the path of the Kuroshio varies greatly. Around coastal areas of western Japan and in the Japan Sea, except the Hokkaido coastline, the standard deviation exceeded 10 cm. The SSH standard deviation was small around Hokkaido and on the Pacific side of Tohoku. The ratio of the JPN-IAU standard deviation to that of the tide-gauge observations (Fig. 9b) mostly indicated a difference of less than 10% between them, except along the Pacific coast of Tohoku. The capture ratio C (Fig. 9c) exceeded 0.8 to 0.9 around most of Japan, although along the Pacific coast from Hokkaido to Tohoku, it was around 0.7. The correlation coefficient R also exceeded approximately 0.9 (Fig. 9d), except on the Pacific Ocean side of Hokkaido. These results indicate that JPN-IAU has high ability to reproduce sea level variations around the Japanese coasts. When original sea level data, including variations due to tidal and SLP effects, are used, the capture ratio and correlation coefficient become much higher. In the sea level validation results for a free-run simulation conducted using the JPN model for 4 years by Sakamoto et al. (2019), the capture ratio was low along the southern coast of Japan, where the Kuroshio path greatly affects sea level variation, even though tidal and SLP effects on SSH were taken into account. The higher capture ratios along the southern coast of Japan in JPN-IAU were achieved through replication of the mesoscale variation caused by the Kuroshio path.
3.3 Volume transports through the Japan Sea
We examined the volume transports through the Japan Sea calculated by the JPN and NPR models to investigate the impact of the high resolution of the model on the reproduction of flow in the shallow straits. The Japan Sea is connected to the adjacent East China Sea, Pacific Ocean, and Sea of Okhotsk through the Tsushima Strait, Tsugaru Strait, and Soya and Mamiya Straits, respectively. These straits have shallow depths of 50 to 200 m, and currents on the downstream side of each strait are trapped against the coast, where they greatly influence coastal water temperature and salinity and sea level variations through momentum, heat, and freshwater transports. Volume transports are often used for the validation of the flow through the straits around the Japan Sea.
Recently, Han et al. (2018) investigated the importance of the resolution with which the bottom topography around the straits to the Japan Sea is modeled. They showed that finely resolved bottom topography in the ocean model around the straits, particularly that around the Tsugaru Strait, induces a large form drag, and, consequently, sea level differences (SLDs) in the along-strait direction become large. Moreover, they showed that overestimates of the volume transport through the Tsugaru Strait by multiple ocean models (Han et al. 2016) are mitigated, along with the increase of SLDs caused by the effect of the form drag, when a fine topographical representation is applied. In this study, we compared the volume transports between numerical models with horizontal resolutions of 2 km (JPN-IAU) and 10 km (NPR-4DVAR).
Table 3 shows the annual volume transports through the Tsushima, Tsugaru, and Soya Straits calculated with JPN-IAU and NPR-4DVAR together with the observed values. Note that because the observation period was different for each strait, the volume transport budget does not balance. The volume transports in both JPN-IAU and NPR-4DVAR satisfied the relationship between the inflow through the Tsushima Strait, which is the largest inflow into the Japan Sea, and the outflow through the Tsugaru and Soya Straits. However, the volume transport through the Tsugaru Strait in NPR-4DVAR (1.97 Sv) was larger than the observed value (1.50 Sv), whereas the volume transport through the Tsugaru Strait in JPN-IAU (1.69 Sv) was close to the observed value. Volume transport through the Soya Strait was also improved in JPN-IAU compared to NPR-4DVAR.
The volume transports through the straits are controlled by the balance between the pressure gradient and bottom friction in the flow direction in the straits, which are related in turn to the SLD in the along-strait direction (e.g., Toba et al. 1982). Therefore, we investigated the SSH difference between NPR-4DVAR and JPN-IAU (Fig. 10). We found that SSH in a large part of the Japan Sea was higher in JPN-IAU than in NPR-4DVAR (Fig. 10b), and the SSH difference between the models was particularly large around the Tsugaru Strait (Fig. 10c). This result suggests that the decrease of volume transport due to the large form drag generated in the Tsugaru Strait resolved by the high 2-km resolution of the JPN model is related to the large SLD in the along-strait direction.

Difference in SSH between JPN-IAU and a AVISO/CMEMS grid data and b NPR-4DVAR averaged over 2008–2017. c Enlarged view of the area in the box in b. Green circles show tide-gauge stations. In a and b, the annual climatology of SSH in JPN-IAU is depicted by gray contours. The gray contours in c are the 100, 200, and 1000 m bottom depth contours. Note that the SSH difference shown in a is the same as the difference between Fig. 8a and b
Next, we compared the SLDs in the along-strait direction represented by the NPR and JPN models with tide-gauge data. For the Tsugaru Strait, the Fukaura and Shimokita stations were chosen at points for determining the SLD in the along-strait direction, and the for the Soya Strait, Wakkanai and Abashiri stations were selected (green circles in Fig. 10c). Figure 11 shows the monthly sea level and SLDs in the along-strait direction around the Tsugaru and the Soya Straits. SLD in the along-strait direction around the Tsugaru Strait in JPN-IAU was more consistent with the tide-gauge data than that in the NPR model. The correlation coefficient for the SLD relationship with the tide-gauge data was close to 0 for the NPR model, whereas it exceeded 0.9 for the JPN model. This improvement stems from the better representation of the sea level at the Shimokita station in the JPN model (Fig. 11b). Even in the Soya Strait, the reproduction of summer and winter sea levels was improved at Wakkanai and Abashiri in the JPN model, and the correlation coefficient of SLD with the tide-gauge data increased from 0.89 in NPR to 0.94 in JPN. Hence, the fine topographic representation in the high-resolution model can improve the response around the straits connecting the Japan Sea with the Pacific Ocean. The volume transport through the Tsushima Strait was also improved in the JPN model because the volume transport through the east channel was decreased in JPN-IAU. This improvement is mainly related to the fact that the northward flow of current through the east channel of the Tsushima Strait is trapped against the coast and exits through the Tsugaru Strait. This information will be useful for gaining a comprehensive understanding of the variations in volume transport through the Japan Sea, which will be addressed in a future study.

Time series of monthly sea level at a Fukaura and b Shimokita around the Tsugaru Strait and at d Wakkanai and e Abashiri around the Soya Strait. Monthly sea level differences (SLDs) between c Fukaura and Shimokita and f Wakkanai and Abashiri. Black, red, and blue lines denote time series in tide-gauge data, JPN-IAU, and NPR-4DVAR, respectively
4 Forecast skill
4.1 Forecast skill for SST and SSH
To validate the forecast skill for SST and SSH in MOVE/MRI.COM-JPN, the bias and capture ratio for each forecast lead time in the JPN-fcst experiments were calculated with the following equations:
where tFT is the forecast lead time (1 to 30 days), Ne is the number of JPN-fcst experiments (i.e., 120), \( {x}_n^{\mathrm{f}} \) is the forecast field in the n-th JPN-fcst experiment, and \( {x}_n^{\mathrm{o}} \) is the observation value on the same date as the valid date to the forecast. MGDSST and AVISO/CMEMS gridded SSHs were used for the reference data. For perfect forecasts (\( {x}_n^{\mathrm{f}}={x}_n^{\mathrm{o}} \) for all n), the bias and capture ratio are equal to 0 and 1, respectively. When forecast errors are comparable to observation variability, capture ratio takes 0; this result means that signals and errors in forecast could not be distinguished.
JPN-fcst exhibited a warm SST bias along the Kuroshio path from the East China Sea to the Kuroshio Extension region that increased with the forecast lead time, whereas it exhibited a cold SST bias in the East China Sea and the southern Japan Sea (Fig. 12a). These warm and cold SST bias distributions probably relate to the tendency for shifts in the Kuroshio path to become larger with lead time in JPN-fcst. The SST capture ratio (Fig. 12b) was generally high; this result implies that processes forced by atmospheric conditions that affect sea surface heat fluxes are dominantly responsible for the SST variation (recall we use atmospheric reanalysis/analysis). The capture ratio is, however, relatively small along the Kuroshio path and in the Kuroshio Extension and Kuroshio/Oyashio confluence regions where the RMSEs are large; this result suggests that an ocean process associated with horizontal advection is dominant in these regions.

a Bias and b capture ratio of SST in JPN-fcst relative to MGDSST at forecast lead times of 10, 20, and 30 days. Black contours in a and b show the ST average and RMSE, respectively, at each forecast lead time
The SSH fields in JPN-fcst showed a positive bias along the Kuroshio path and a negative bias in the East China Sea and the Japan Sea (Fig. 13a). This distribution is similar to the SST distribution (Fig. 13a). In the Kuroshio Extension region, a dipole structure characterized by a positive bias on the east side and a negative bias on the west side becomes more pronounced as the forecast lead time increases; this result suggests that the currents tend to take a straight path at greater lead times. Around the Izu Ridge, the Kuroshio path tends to shift eastward, as indicated by the existence of a negative (east side) and positive (west side) dipole structure across the Izu Ridge at 140o E. The SSH capture ratio (Fig. 13b) was relatively high, more than about 0.5, along the Kuroshio path south of Japan and in the Japan Sea and the East China Sea, even at the 30-day forecast lead time. If we consider a capture ratio of 0.5 as a threshold, it means that the correlation coefficient is at least above 0.7 based on the decomposition method for the capture ratio, which is the same with that of the skill score based on the mean-square error in Murphy (1988), then this result suggests that the predictive limit of MOVE/MRI.COM-JPN is longer than 1 month in these regions. This result is consistent with previous studies showing that the predictability of the Kuroshio path variability is 1 to 2 months (e.g., Komori et al. 2003; Kamachi et al. 2004; Usui et al. 2006b). In contrast, it is difficult to forecast SSH in the Kuroshio Extension and the Kuroshio/Oyashio confluence regions and in the Sea of Okhotsk. The forecast skill of the model needs to be improved in these areas in the future.

Same as Fig. 12 but for the a bias and b capture ratio of SSH relative to the AVISO/CMEMS product. The thick red line in b is the 0.5 contour. Note that the range of the capture ratio in b (− 1 to 1) is different from that used for the capture ratio of SST in Fig. 12a (0.5 to 1). Only positive capture ratio values indicate realistic signals
4.2 Forecast skill for sea ice concentration in the Sea of Okhotsk
We investigated the sea ice assimilation (JPN-IAU) and forecast (JPN-fcst) performances in the Sea of Okhotsk.
Local Meteorological Observatories (LMOs) conduct visual sea ice observations along the Hokkaido coastline. In this paper, we compare visual sea ice observations made by the Abashiri LMO with the coastal sea ice distributions in the numerical models. Visibility can reach up to several tens of kilometers from the coast, but the days on which sea ice observations can be made depend on weather conditions. Time series of SIC off Abashiri from 2008 to 2017 are shown in Fig. 14. To express the visual observation range off Abashiri, SIC in JMASIA and the numerical models (JPN-IAU and JPN-fcst) was averaged within an area of about 10 km × 10 km (green box in Fig. 15). JMASIA, which is considered as the observed time series, roughly captures the features observed at Abashiri. In JMASIA, SIC began to increase around the first day of visual observation, and it became 0 around the last day. Therefore, SIC averaged within the 10 km × 10 km area is an adequate indicator of the sea ice amount off Abashiri. JPN-IAU (Fig. 14, red line) mostly reproduced the seasonal SIC variation in JMASIA (black line); therefore, sea ice assimilation by the nudging method worked correctly. Daily JMASIA values obtained by linear interpolation between operational analyses conducted at intervals about 5 days only roughly capture SIC variations, but the short-term intraseasonal SIC variations in JPN-IAU suggest that SIC is influenced by drifting due to ocean currents and winds. In the 10 forecasts starting from 1 January, sea ice reached near Hokkaido coast but did not get close to off Abashiri.

Time series of SIC in JMASIA (black line), JPN-IAU (red line), and JPN-fcst (various colors, depending on the initial date, shown by colored circles) averaged within a 10-km2 area (green box in Fig. 15) off Abashiri in the Sea of Okhotsk during each year from 2008 to 2017. Vertical gray bars denote the first and last dates on which drift ice was visually observed by Abashiri Local Meteorological Observatory (visual observation data are available at http://www.data.jma.go.jp/gmd/kaiyou/data/db/seaice/hokkaido/data/statistical/abashiri.txt)

SIC distribution in the southern Sea of Okhotsk in a–d JMASIA and e–h JPN-fcst starting on 1 January 2013. Forecast lead time is 1, 10, 20, and 30 days, respectively. Distributions in JAMSIA on the same date as the valid date of the model forecasts are depicted. Surface current vectors (purple arrows) in e–h are shown where the current velocity is greater than 20 cm s−1. The red dashed lines show the 200-m (thick) and 1000-m (thin) bottom depth contours in the JPN model
Figure 15 shows the SIC in January 2013 in JMASIA and JPN-fcst. In JMASIA, sea ice drifted straight southward from the area southeast of Sakhalin in early January (Fig. 15b) and reached the area around Abashiri in late January (Fig. 15c, d). In contrast, in JPN-fcst, the sea ice moved southwestward from southeast of Sakhalin in early January (Fig. 15f); thus, the movement directly southward was weak. Nevertheless, the sea ice reached the coastline northwest of Abashiri by the end of January (Fig. 15h).
In contrast, in JPN-fcst runs starting in February and March when the sea ice had reached the Hokkaido coast, the temporal variation of SIC within 1 month could be predicted (Fig. 14). In April, when sea ice retreats northward from the coasts of Hokkaido, at least the sea ice was not overestimated in JPN-fcst. Therefore, SIC in the Sea of Okhotsk can be reproduced by data assimilation by a nudging scheme and can be predicted adequately, although the forecast skill depends on the initial state.
5 Kuroshio meanders and their impact on coastal waters
The Kuroshio south of Japan has a large impact on the ocean state, not only in the open ocean but also in coastal areas. In this section, we therefore focus on the simulation performance of MOVE/MRI.COM-JPN for the Kuroshio large meander (KLM) in 2017 and warm water intrusions related to the Kuroshio path variation.
5.1 Kuroshio large meander in 2017
In late August 2017, a KLM event occurred for the first time in 12 years (since the 2004–2005 event). We evaluated the reproduction of the 2017 event in a series of experiments by MOVE/MRI.COM-JPN.
First, sea level variation in the period before and after the occurrence of the KLM in JPN-IAU was evaluated against tide-gauge data. Because our focus was on nontidal variation of the ocean state, SLP and residual tidal corrections were applied to both the model and observation data. In addition to sea level along the southern coast of Japan and around the Izu Islands, the SLD between Kushimoto and Uragami stations, one indicator of a KLM event (Kawabe 1980), was used in the evaluation (Fig. 16a). When a KLM occurs, SLD between Kushimoto and Uragami becomes small, because when the Kuroshio path separates from the coast at the Kii Peninsula, these two tide-gauge stations exhibit similar sea level variations. In fact, SLD between Kushimoto and Uragami in JPN-IAU became small after mid-August, when the KLM occurred (Fig. 16f). The sea level variations at Miyakejima and Hachijojima, which are strongly influenced by Kuroshio path variations, were also well reproduced in JPN-IAU (Fig. 16b–f). At stations on the southern coast of Japan such as Murotomisaki and Omaezaki, sea level variation, including its short-term components, was also successfully reproduced in JPN-IAU.

a SSH in JPN-IAU on 1 July 2017. The positions of tide-gauge stations are shown by red circles. b–e and g–j Sea level time series at Murotomisaki, Omaezaki, Miyakejima, and Hachijojima, respectively: tide-gauge data (black line), JPN-IAU (red line), and JPN-fcst starting on 30 July 2017 (green line) and 9 August 2017 (blue line). f, k SLD between Kushimoto and Uragami in tide-gauge data (black line), JPN-IAU (red line), and JPN-fcst starting on 30 July 2017 (green line) and 9 August 2017 (blue line)
The time evolution of SSH in JPN-IAU shows the transition to the KLM (Fig. 17). In early July 2017, a small meander located southeast of Kyushu (Fig. 17a) developed as it moved eastward (Fig. 17b). The trough of the meander was off Cape Murotomisaki (see Fig. 16a) by late July (Fig. 17c), and by early August, it was east of Kii Peninsula (Fig. 17d). In late August, the amplitude of the meander increased, and its trough extended southward to about 32 ° N (Fig. 17f). From September to October, the Kuroshio meander continued to develop, and the Kuroshio followed the so-called tLM path (Fig. 17g–i).

a–i Snapshots of SSH in JPN-IAU from 1 July to 18 October 2017. The thick black line is the SSH contour at the maximum surface velocity grid off Kii Peninsula (135.5 ° E, 32.0 – 34.0 ° N)
Two forecast experiments were performed with JPN-fcst to forecast the KLM transition in 2017 using initial conditions produced by JPN-IAU on 30 July (Exp-1) and 9 August (Exp-2) 2017. Because our focus was on the dependence of the forecast on the initial conditions, we used the same atmospheric forcing and river discharge from JRA55-do as were used in JPN-IAU.
In the initial conditions of the forecast experiments, the small meander had propagated eastward from southeast of Kyushu to off Shikoku in Exp-1 (Fig. 17c) and to off Kii Peninsula in Exp-2 (Fig. 17d). In Exp-1, which was started using the initial condition on 30 July 2017, the small meander reached the area east of the Kii Peninsula in early August (Fig. 18a), but the development of the meander was weak compared to that in JPN-IAU (Fig. 17d). Moreover, the small meander did not develop and moves eastward in mid-August (Fig. 18b), and an isolated anticyclonic eddy was centered at 139 ° E, 31 ° N, south of the meander. This anticyclonic eddy may have prevented the southward meandering of the Kuroshio in Exp-1 (Fig. 18b), whereas in JPN-IAU, it seemed to be merged with the anticyclonic recirculation south of Shikoku (Fig. 17e). In late August, when the actual KLM developed (Fig. 17f), the Kuroshio path had hardly shifted southward in Exp-1 (Fig. 18c), and in September, the forecasted Kuroshio path was close to the oNLM (Fig. 18d, e). The second amplification of the meander in mid-October was represented well, although with some discrepancies, such as in the position of the Kuroshio around the Izu Ridge (Fig. 18f).

a–f Snapshot of SSH in the JPN-fcst experiment started with the 30 July 2017 initial condition (Exp-1). The thick black line is the SSH contour at the maximum surface velocity grid off Kii Peninsula (135.5 ° E, 32.0 – 34.0 ° N)
In Exp-2, in which the forecast was started using the initial condition on 9 August 2017, both the initial (late August) and later (September–October) development of the meander were successfully reproduced (Fig. 19). In mid-August, the ridge and trough of the meander were west of the Izu Ridge (Fig. 19a) and the large meander formed in late August (Fig. 19b), although it had shifted southward slightly less compared with JPN-IAU (Fig. 17f). In mid-September, the meander stretched southeastward (Fig. 19c), but by late September, it had developed again (Fig. 19d) and, similar to JPN-IAU, the Kuroshio meander was large in mid-October, and the flow was northward along the Izu Ridge (Fig. 19e).

Same as Fig. 18 but in the JPN-fcst experiment started with the 9 August 2017 initial condition (Exp-2)
Sea level in Exp-1 (green line in Fig. 16) and Exp-2 (blue line in Fig. 16) at Omaezaki (Fig. 16h) exhibited short-term variation similar to that in the tide-gauge data. However, sea level was low compared to the tide-gauge data during September and October in Exp-1, probably because instead of flowing northward along the Izu Islands, the Kuroshio was flowing eastward across the islands. The sea level increase along the northward Kuroshio path along the Izu Islands in JPN-IAU (Fig. 17h, i) and Exp-2 (Fig. 19d, e) reached the coastal area around Suruga Bay (see Fig. 4), whereas in Exp-1, no sea level rise was reproduced from the Izu Islands to Suruga Bay (Fig. 18e, f). In addition, in Exp-2, sea level at Miyakejima (Fig. 16i, blue line) and Hachijojima (Fig. 16j, blue line) was mainly in phase with the observed variation because the forecast Kuroshio path was properly represented, although the amplitude of the variation was slightly small. The SLD between Kushimoto and Uragami was small up until mid-October in both Exp-1 and Exp-2. After that, however, the SLD became large in Exp-1 but remained small in Exp-2. Therefore, the reproducibility of the KLM in 2017 greatly depends on the initial conditions. In general, the KLM results from a transition from the nNLM to the tLM path (e.g., Kawabe 1995). However, in 2017, the Kuroshio path was shifted to the tLN path from the oNLM path. An outstanding feature of the formation stage of this large meander was the presence of two distinct anticyclonic eddies to the south of the Kuroshio (Fig. 17a–c). The one located off the Kii Peninsula (e.g., Fig. 17b) was probably related to the oNLM path before the development of the large meander. The other was located southeast of Kyushu. The two eddies merged into a developed eddy in early August (Fig. 17d). This merging of the two eddies seemed to make forecasting the KLM difficult in Exp-1. Although we found a high dependency on initial conditions in the forecast experiments targeting the KLM, it was still possible to forecast the meandering path of the Kuroshio with a lead time of about 1 month.
5.2 Warm water intrusion along the southern coast of Japan
We compared the warm water intrusion in late winter 2016 as expressed in JPN-fcst with SST data retrieved by the Himawari-8 geostationary satellite (Himawari-SST; Kurihara et al. 2016); these satellite data are independent of MGDSST and, therefore, of JPN-IAU. Himawari-SST data have a horizontal resolution of 2 km, and we used the daily average of the hourly Himawari-SST, excluding missing data, in this comparison. SST maps for late February to early March in Himawari and JPN-fcst initialized on 5 February are shown in Fig. 20. The Kuroshio followed the nNLM during the late winter 2016. Filamentous SST structures can be seen on the north side of the Kuroshio path in both JPN-fcst and Himawari-SST. Close inspection of the time evolution of the forecasted SST shows that the northern edge of the Kuroshio meander, which was located at around 139 ° E, 34 ° N on 26 February (Fig. 20), subsequently approached the coast, leading to the intrusion of warm water into Suruga Bay in early March.

Snapshots of SST in Himawari-SST data (top row) and JPN-fcst initialized on 5 February (bottom row) on 26 February, 1 March, and 3 March 2016. The red circles in the left column denote the position of station Mera of FRA-RMIAS
At station Mera, on the southeast of Suruga Bay (red circles in the left column of Fig. 20), the sudden increase in SST after late February caused by this warm water intrusion is adequately expressed in JPN-fcst (Fig. 21, sky-blue line). The reproducibility of SST at Mera in JPN-fcst depends on the initial state of the Kuroshio path (Fig. 21). Knowledge of the statistical relationship between the Kuroshio path and warm water intrusions would be beneficial not only for ocean science but also for socioeconomic activities such as fisheries.

SST time series at Mera (see Fig. 20) for FRA-RMIAS observations (black line) and JPN-fcst (gray lines and blue line). The JPN-fcst forecasts were initialized on 1 January, 5 February, 2 March, and 1 April 2016
6 Summary and discussion
An ocean monitoring and prediction system, MOVE/MRI.COM-JPN, was developed in the Meteorological Research Institute for operational use by the Japan Meteorological Agency. This system consists of an eddy-resolving analysis model to perform 4DVAR assimilation covering the whole North Pacific and a high (2-km) resolution forecast model to predict ocean state by temperature and salinity fields initialized by IAU based on the 4DVAR analysis results. Temporal and spatial filters were adapted so that the increments would not dampen the inherent variability in the high-resolution model. SIC data are assimilated by nudging. By using this system, a high-resolution analysis field (JPN-IAU) for 2008–2017 was obtained. In addition, a series of 30-day forecast experiments was performed in the high-resolution framework with initial conditions taken from the analysis fields for each month of each year during 2008–2017 (JPN-fcst), and these forecasted results were compared with the analysis field and observations.
SST and SSH fields in JPN-IAU were consistent with those of satellite-based observation products: MGDSST and AVISO/CMEMS gridded SSH. Hence, the IAU scheme successfully initialized the high-resolution model. Moreover, in shallow seas such as the Seto Inland Sea, SST biases relative to buoy data in JPN-IAU were smaller than those in MGDSST as used in the 4DVAR assimilation (with a lower resolution model). Power spectrum analysis for SST indicated that JPN-IAU has a potential to represent short-term variations in coastal regions caused by Kuroshio path variation, as shown by the high capture ratios of the coastal sea level variability signals in JPN-IAU and high correlation coefficients between the JPN-IAU results and the observational data. The use of high-resolution model also improved the volume budget balance in the Japan Sea, compared with the low-resolution (10 km) model, so that it was more consistent with transport observations. This result can be attributed to the fact that form drag effects caused by the complicated bottom topography around the Japan Sea straits led to large SLDs in the along-strait direction. In the Tsugaru Strait, in particular, SLDs in the along-strait direction were remarkably improved in the high-resolution model.
SST reproduced in the JPN-fcst experiment, forced by analysis/reanalysis atmospheric products, showed relatively high capture ratios relative to the observational MGDSST signals within 1 month, because the SST fields were mostly determined by sea surface heat fluxes. The capture ratios of the SSH signals (relative to AVISO/CMEMS data) were low in the Kuroshio Extension and Kuroshio/Oyashio confluence regions and in the Sea of Okhotsk, where there were large RMSEs in JPN-fcst compared with the observational data. However, along the Kuroshio path south of Japan, in subtropical regions, and in the southern Japan Sea, capture ratios greater than 0.5 were generally obtained, even in the 30-day forecast results.
The forecast skill for sea ice in the Sea of Okhotsk was evaluated around Abashiri, on the coast of Hokkaido facing the Sea of Okhotsk. The sea ice distribution was realistically reproduced by the high-resolution JPN-IAU experiment through assimilation of JMA operational SIC data. In February and March, when sea ice usually covers the southern Sea of Okhotsk, short-term variation of sea ice was well captured in JPN-fcst. In January, however, the reproduction of the southward drift of sea ice to the Hokkaido coast was rather weak in JPN-fcst. A weak southward drift of the sea ice from the southeast of Sakhalin in January was also seen in the forecast experiment results for other years (not shown). These results likely reflect the low forecast skill of SSH in the Sea of Okhotsk. Ocean currents are important drivers of the southward drift of the sea ice (e.g., Fujisaki et al. 2007; Simizu et al. 2014), and Simizu et al. (2014) have shown that wind above the sea ice has a counterclockwise rotation angle of about 15° to 20° relative to the sea ice drift. In JPN-fcst, however, the rotation angle of the wind above the sea ice is set to 0° (i.e., the sea ice drift is parallel to the wind direction), which likely affects the sea ice distribution. In winter, in situ and satellite altimetry observations of the sea ice cover in the Sea of Okhotsk are limited, and it is therefore difficult to correct the ocean state by assimilation, particularly in the shelf area where water depths are shallower than about 200 m and SLAs are not assimilated. Both the ocean model and data assimilation will need to be modified to improve the reproducibility of the ocean circulation and sea ice fields in the southern Sea of Okhotsk.
The JPN-IAU result captured well the transition to the KLM that occurred in late August 2017 for the first time since 2005. The path transition associated with the large meander formation could be largely reproduced by the forecast experiments with a lead time of about 1 month, although possible dependence on the initial ocean state around the Kuroshio and nearby eddies was seen. Warm-water intrusions into Suruga Bay related to the Kuroshio path variation were successfully predicted, in some cases within 1 month. It should be noted, however, that coastal SST variations in JPN-IAU at Mera associated with the warm water intrusion in February–March 2016 were not reproduced as well as in JPN-fcst (not shown), even though observation data were assimilated in JPN-IAU, probably because SST variations in JPN-IAU near the coast when the Kuroshio takes a nearshore path and the SST gradient near the coast is relatively large were smoothed by the assimilation of MGDSST. Therefore, in future work, the SST assimilation scheme needs to be improved for proper representation of coastal SST variations.
The IAU scheme used for initialization for the high-resolution model in this study could be improved to make it more skillful. At present, a spatial Gaussian filter with a 5-km radius is applied to calculate the increment for the high-resolution model. In the Kuroshio and Kuroshio Extension regions, where advection effects are large, rapid downstream propagation can alter an isotropic deformation information. In particular, the deformation isotropy would be lost in regions near the coast with complex topography. Moreover, although it is possible to eliminate the influence of internal tidal waves by using a temporal filter, the effect of tidal mixing in weakening stratification should be considered when determining the increments. Thus, the design of the temporal and spatial filter is important for improving the representation of the coastal phenomenon, and many improvements in the initialization method are needed. However, the positive results in JPN-IAU and JPN-fcst experiments suggest that the performance of this system is adequate for operational monitoring and forecasting of the coastal ocean.
In the further, improved data assimilation based solely on the T–S corrections should be developed because some coastal phenomena do not satisfy the assumption of geostrophic balance. In shallow seas and in areas where tidal effects dominate, such as in the Seto Inland Sea, ageostrophic components are large, and they should be controlled by constraints of the current field, for example, by assimilation of high-frequency radar measurements. To achieve this objective, future development of the system should take account of ageostrophic components to further improve the reliability and usefulness of the operational system, even though the computational cost would be increased.
References
Bloom SC, Takacs LL, Silva AMD, Ledvina D (1996) Data assimilation using incremental analysis updates. Mon Weather Rev 124:1256–1271
Boyer TP, Antonov JI, Baranova OK, Coleman C, Garcia HE, Grodsky A, Johnson DR, Locarnini RA, Mishonov AV, O'Brien TD, Paver CR, Reagan JR, Seidov D, Smolyar IV, Zweng MM (2013) World ocean database 2013. NOAA Atlas NESDIS 72
Fujii Y (2005) Preconditioned optimizing utility for large-dimensional analyses (POpULar). J Oceanogr 61:167–181
Fujii Y, Kamachi M (2003) Three-dimensional analysis of temperature and salinity in the Equatorial Pacific using a variational method with vertical coupled temperature-salinity EOF modes. J Geophys Res 108:3297. https://doi.org/10.1029/2002JC001745
Fujii Y, Ishizaki S, Kamachi M (2005) Application of nonlinear constraints in a three-dimensional variational ocean analysis. J Oceanogr 61:655–662
Fujii S, Heron ML, Kim K, Lai JW, Lee SH, Wu X, Wu X, Wyatt LR, Yang WC (2013) An overview of developments and applications of oceanographic radar networks in Asia and Oceania countries. Ocean Sci J 48(1):69–97
Fujisaki A, Yamaguchi H, Duan F, Sagawa G (2007) Improvement of short-term sea ice forecast in the southern Okhotsk Sea. J Oceanogr 63(5):775–790. https://doi.org/10.1007/s10872-007-0066-x
Fukudome KI, Yoon JH, Ostrovskii A, Takikawa T, Han IS (2010) Seasonal volume transport variation in the Tsushima warm current through the Tsushima Straits from 10 years of ADCP observations. J Oceanogr 66(4):539–551
Hamilton D (1994) GTSPP builds an ocean temperature-salinity database. Earth Syst Monitor 4:4–5
Han S, Hirose N, Usui N, Miyazawa Y (2016) Multi-model ensemble estimation of volume transport through the straits of the East/Japan sea. Ocean Dyn 66(1):59–76. https://doi.org/10.1007/s10236-015-0896-9
Han S, Hirose N, Kida S (2018) The role of topographically induced form drag on the channel flows through the East/Japan Sea. J Geophys Res: Oceans 123:6091–6105. https://doi.org/10.1029/2018JC013903
Hinata H, Yanagi T, Takano T, Kawamura H (2005) Wind-induced Kuroshio warm water intrusion into Sagami Bay. J Geophys Res 110(C3):C03023. https://doi.org/10.1029/2004JC002300
Hunke EC, Dukowicz JK (1997) An elastic-viscous-plastic model for sea ice dynamics. J Phys Oceanogr 27:1849–1867. https://doi.org/10.1175/1520-0485(1997)027<1849:AEVPMF>2.0.CO;2
Hunke EC, Dukowicz JK (2002) The elastic-viscous-plastic sea ice dynamics model in general orthogonal curvilinear coordinates on a sphere: incorporation of metric terms. Mon Weather Rev 130:1848–1865. https://doi.org/10.1175/1520-0493(2002)130<1848:TEVPSI>2.0.CO;2
IPCC (2014) Climate change 2014: synthesis report. Contribution of working groups I, II and III to the fifth assessment report of the Intergovernmental Panel on Climate Change [Core Writing Team, R.K. Pachauri and L.A. Meyer (eds.)]. IPCC, Geneva, Switzerland, 151 pp
Isobe A, Guo X, Takeoka H (2010) Hindcast and predictability of sporadic Kuroshio-water intrusion (Kyucho in the Bungo Channel) into the shelf and coastal waters. J Geophys Res 115:C04,023. https://doi.org/10.1029/2009JC005818
Isobe A, Kako S, Guo X, Takeoka H (2012) Ensemble numerical forecasts of the sporadic Kuroshio water intrusion (Kyucho) into shelf and coastal waters. Ocean Dyn 62(4):633–644
Ito T, Togawa O, Ohnishi M, Isoda Y, Nakayama T, Shima S, Kuroda H, Iwahashi M, Sato C (2003) Variation of velocity of volume transport of the Tsugaru warm current in the winters of 1999-2000. Geophys Res Lett 30:1678
Kamachi M, Kuragano T, Sugimoto S, Yoshita K, Sakurai T, Nakano T, Usui N, Uboldi F (2004) Short-range prediction experiments with operational data assimilation system for the Kuroshio south of Japan. J Oceanogr 60:269–282
Katusumata T (2016) Generation of periodic intrusions at Suruga Bay when the Kuroshio follows a large meandering path. Cont Shelf Res 123:9–17. https://doi.org/10.1016/j.csr.2016.04.005
Kawabe M (1980) Sea level variations along the south coast of Japan and the large meander in the Kuroshio. J Oceanogr Soc Jpn 36:97–104
Kawabe M (1987) Spectral properties of sea level and time scale of Kuroshio path variations. J Oceanogr Soc Jpn 43:111–123
Kawabe M (1995) Variations of current path, velocity, and volume transport of the Kuroshio in relation with the large meander. J Phys Oceanogr 25:3103–3117
Komori N, Awaji T, Ishikawa Y, Kuragano T (2003) Short-range forecast experiments of the Kuroshio path variabilities south of Japan using TOPEX/Poseidon altimetric data. J Geophys Res 108(C1:3010. https://doi.org/10.1029/2001JC001282
Kuragano T, Kamachi M (2000) Global statistical space-time scales of oceanic variability estimated from the TOPEX/POSEIDON altimetry data. J Geophys Res 105:955–974
Kurihara Y, Sakurai T, Kuragano T (2006) Global daily sea surface temperature analysis using data from satellite microwave radiometer, satellite infrared radiometer and in-situ observations. Weather Bull 73:s1–s18 (in Japanese)
Kurihara Y, Murakami H, Kachi M (2016) Sea surface temperature from the new Japanese geostationary meteorological Himawari-8 satellite. Geophys Res Lett 43:1234–1240. https://doi.org/10.1002/2015GL067159
Kuroda H, Setou T, Aoki K, Takahashi D, Shimizu M, Watanabe T (2013) A numerical study of the Kuroshio-induced circulation in Tosa Bay, off the southern coast of Japan. Cont Shelf Res 53:50–62. https://doi.org/10.1016/j.csr.2012.12.005
Kuroda H, Setou T, Kakehi S, Ito S, Taneda T, Azumaya T, Inagake D, Hiroe Y, Morinaga K, Okazaki M, Yokota T, Okunishi T, Aoki K, Shimizu Y, Hasegawa D, Watanabe T (2017) Recent advances in Japanese fisheries science in the Kuroshio-Oyashio region through development of the FRA-ROMS ocean forecast system: overview of the reproducibility of reanalysis products. Open J Mar Sci 7:62–90. https://doi.org/10.4236/ojms.2017.71006
Kuroda H, Takasuka A, Hirota Y, Kodama T, Ichikawa T, Takahashi D, Aoki K, Setou T (2018) Numerical experiments based on a coupled physical–biochemical ocean model to study the Kuroshio-induced nutrient supply on the shelf-slope region off the southwestern coast of Japan. J Mar Syst 179:38–54. https://doi.org/10.1016/j.jmarsys.2017.11.002
Leonard BP (1979) A stable and accurate convective modeling procedure based upon quadratic upstream interpolation. J Comput Methods Appl Mech Eng 19:59–98. https://doi.org/10.1016/0045-7825(79)90034-3
Locarnini RA, Mishonov AV, Antonov JI, Boyer TP, Garcia HE, Baranova OK, Zweng MM, Paver CR, Reagan JR, Johnson DR, Hamilton M, Seidov D (2013) World ocean atlas 2013, volume 1: temperature. NOAA atlas NESDIS 73
Mellor GL, Kantha L (1989) An ice-ocean coupled model. J Geophys Res 94:10937–10954. https://doi.org/10.1029/JC094iC08p10937
Mertz, F, Pujol MI, Faugère Y, (2018). Product user manual (CMEMS-SL-PUM-008-032-051). cmems-resources.cls.fr, version 4.0
Miyazawa Y, Zhang T, Guo X, Tamura H, Ambe D, Lee JS, Okuno A, Yoshinari H, Setou T, Komatsu K (2009) Water mass variability in the western North Pacific detected in a 15-year eddy resolving ocean reanalysis. J Oceanogr 65:737–756
Murphy AH (1988) Skill scores based on the mean squared error and their relationships to the correlation coefficient. Mon Weather Rev 116:2417–2424
Nishida Y, Kanomata I, Tanaka I, Sato S, Takahashi S, Matsubara H (2003) Seasonal and interannual variations of the volume transport through the Tsugaru strait. Umi no kenkyu 12:487{499 (in Japanese with English abstract)
Ohshima KI, Simizu D, Ebuchi N, Morishima S, Kashiwase H (2017) Volume, heat, and salt transports through the soya strait and their seasonal and interannual variations. J Phys Oceanogr 47(5):999–1019. https://doi.org/10.1175/JPO-D-16-0210.1
Prather MJ (1986) Numerical advection by conservation of second-order moments. J Geophys Res 91(D6):6671–6681. https://doi.org/10.1029/JD091iD06p06671
Qiu B, Chen S (2010) Interannual variability of the North Pacific subtropical countercurrent and its associated mesoscale eddy field. J Phys Oceanogr 40:213–225. https://doi.org/10.1175/2009JPO4285.1
Ramp SV, Barrick DE, Ito T, Cook MS (2008) Variability of the Kuroshio current south of Sagami Bay as observed using long-range coastal HF radars. J Geophys Res 110(C3):C06024. https://doi.org/10.1029/2007JC004132
Sakamoto K, Tsujino H, Nakano H, Hirabara M, Yamanaka G (2013) A practical scheme to introduce explicit tidal forcing into an OGCM. Ocean Sci 9:1089–1108. https://doi.org/10.5194/os-9-1089-2013
Sakamoto K, Yamanaka G, Tsujino H, Nakano H, Urakawa S, Usui N, Hirabara M, Ogawa K (2016) Development of an operational coastal model of the Seto Inland Sea, Japan. Ocean Dyn 66(1):77–97. https://doi.org/10.1007/s10236-015-0908-9
Sakamoto K, Tsujino H, Nakano H, Urakawa LS, Toyoda T, Hirose N, Usui N, Yamanaka G (2019) Development of a 2km-resolution ocean model covering the coastal seas around Japan for operational application. Ocean Dyn in press. https://doi.org/10.1007/s10236-019-01291-1
Simizu D, Ohshima KI, Ono J, Fukamachi Y, Mizuta G (2014) What drives the southward drift of sea ice in the Sea of Okhotsk? Prog Oceanogr 126:33–43. https://doi.org/10.1016/j.pocean.2014.05.013
Suzuki T, Yamazaki D, Tsujino H, Komuro Y, Nakano H, Urakawa S (2017) A dataset of continental river discharge based on JRA-55 for use in a global ocean circulation model. J Oceanogr 74:421–429. https://doi.org/10.1007/s10872-017-0458-5
Takahashi D, Morimoto A, Nakamura T, Hosaka T, Mino Y, Dang VH, Saino T (2012) Short-term flow and water temperature fluctuations in Sagami Bay, Japan, associated with variations of the Kuroshio during the non-large-meander path. Prog Oceanogr 105:47–60. https://doi.org/10.1016/j.pocean.2012.04.012
Toba Y, Tomizawa K, Kurasawa Y, Hanawa K (1982) Seasonal and year-to-year variability of the Tsushima Tsugaru warm current system with its possible cause. La Mer 20:41–51
Tsujino H, Nakano H, Sakamoto K, Urakawa S, Hirabara M, Ishizaki H, Yamanaka G (2017) Reference manual for the Meteorological Research Institute Community Ocean Model version 4 (MRI.COMv4). Tech Rep. 80. Meteorological Research Institute, Japan. https://doi.org/10.11483/mritechrepo./80
Tsujino H, Urakawa S, Nakano H, Small RJ, Kim WM, Yeager SG, Danabasoglu G, Suzuki T, Bamber JL, Bentsen M, Böning CW, Bozec A, Chassignet EP, Curchitser E, Dias FB, Durack PJ, Griffies SM, Harada Y, Ilicak M, Josey SA, Kobayashi C, Kobayashi S, Komuro Y, Large WG, Sommer JL, Marsland SJ, Masina S, Scheinert M, Tomita H, Valdivieso M, Yamazaki D (2018) JRA-55 based surface dataset for driving ocean-sea-ice models (JRA55-do). Ocean Modell 130:79–139. https://doi.org/10.1016/j.ocemod.2018.07.002
Urakawa LS, Yamanaka G, Hirabara M, Sakamoto K, Tsujino H, Nakano H (2016) Assessment of the usefulness of JMA runoff index in coastal ocean modeling around Japan. Weather Bull 83:s33–s45 (in Japanese), http://www.jma.go.jp/jma/kishou/books/sokkou-kaiyou/83/vol83s033.pdf. Accessed 28 Dec 2018
Usui N, Ishizaki S, Fujii Y, Tsujino H, Yasuda T, Kamachi M (2006a) Meteorological Research Institute multivariate ocean variational estimation (MOVE) system: some early results. Adv Space Res 37:806–822. https://doi.org/10.1016/j.asr.2005.09.022
Usui N, Tsujino H, Fujii Y, Kamachi M (2006b) Short-range prediction experiments of the Kuroshio path variabilities south of Japan. Ocean Dyn 56:607–623
Usui N, Imaizumi T, Tsujino H (2010) Toward introduction of assimilation of ice concentration into move/mri.com: a model validation and a simple assimilation experiment in the sea of Okhotsk. Weather Bull 77:s72–s82 (in Japanese), http://www.jma.go.jp/jma/kishou/books/sokkou-kaiyou/77/vol77s071.pdf. Accessed 28 Dec 2018
Usui N, Ishizaki S, Fujii Y, Kamachi M (2011) Improving strategies with constraints regarding non-Gaussian statistics in a three-dimensional variational assimilation method. J Oceanogr 67:253–262
Usui N, Fujii Y, Sakamoto K, Kamachi M (2015) Development of a four-dimensional variational assimilation system toward coastal data assimilation around Japan. Mon Weather Rev 143:3874–3892. https://doi.org/10.1175/MWR-D-14-00326.1
Usui N, Wakamatsu T, Tanaka Y, Hirose N, Toyoda T, Nishikawa S, Fujii Y, Takatsuki Y, Igarashi H, Nishikawa H, Ishikawa Y, Kuragano T, Kamachi M (2017) Four-dimensional variational ocean reanalysis: a 30-year high-resolution dataset in the western North Pacific (FORA-WNP30). J Oceanogr 73:205–233. https://doi.org/10.1007/s10872-016-0398-5
Varlamov SM, Guo X, Miyama T, Ichikawa K, Waseda T, Miyazawa Y (2015) M2 baroclinic tide variability modulated by the ocean circulation south of Japan. J Geophys Res Oceans 120(5):3681–3710. https://doi.org/10.1002/2015JC010739
Watanabe T, Ikeda M, Wakatsuchi M (2004) Thermohaline effects of the seasonal sea ice cover in the sea of Okhotsk. J Geophys Res 109(C9):C09S02. https://doi.org/10.1029/2003JC001905
Zweng MM, Reagan JR, Antonov JI, Locarnini RA, Mishonov AV, Boyer TP, Garcia HE, Baranova OK, Johnson DR, DSeidov, Biddle MM (2013) World ocean atlas 2013, volume 2: salinity. NOAA Atlas NESDIS 74
Acknowledgments
We thank the members of the Global Environment and Marine Department of Japan Meteorological Agency for fruitful discussions and helpful comments. Thanks are extended to two anonymous reviewers for their variable comments that greatly helped improve an early version of the manuscript. In situ temperature and salinity profiles were obtained from the World Ocean Database (WOD: ftp://ftp.nodc.noaa.gov/pub/WOD/) and the Global Temperature-Salinity Profile Program (GTSPP: ftp://ftp.nodc.noaa.gov/pub/data.nodc/gtspp) websites. The delayed-mode altimeter products were produced and distributed by the Archiving, Validation and Interpretation of Satellite Oceanographic data (AVISO) and the Copernicus Marine and Environment Monitoring Service (CMEMS). The tide gauge data, Merged Satellite and In situ Data Global Daily SST (MGDSST), Himawari-SST, near-real-time altimeter datasets, and in situ temperature and salinity profiles obtained operationally were provided from the Japan Meteorological Agency (JMA). Sea level pressure data was obtained from the JMA’s website. The station temperature data is acquired from acquired from the real-time marine information acquisition and analysis system operated by Japan Fisheries Research and Education Agency and the Online Water Quality Monitoring System in Osaka Bay.
Funding
This work was funded by Meteorological Research Institute. This study was partly supported by JSPS KAKENHI Grant Numbers 16H02226 and 19K03978, Research Program on Core Research for Evolutional Science and Technology (CREST JPMJCR1681) of MEXT, and the Joint Research Program of the Institute of Low Temperature Science, Hokkaido University (18S0002 and 19S0003).
Author information
Authors and Affiliations
Corresponding author
Additional information
Responsible Editor: Emil Vassilev Stanev
This article is part of the Topical Collection on Coastal Ocean Forecasting Science supported by the GODAE OceanView Coastal Oceans and Shelf Seas Task Team (COSS-TT) - Part II
Appendix: Abbreviations
Appendix: Abbreviations
Abbreviations used frequently in this paper are summarized as follows:
- AVISO:
Archiving, Validation and Interpretation of Satellite Oceanographic data
- CMEMS:
Copernicus Marine and Environment Monitoring Service
- IAU:
Increment analysis updates
- IB:
Inverted barometer
- JMA:
Japan Meteorological Agency
- KLM:
Kuroshio large meander
- MGDSST:
Merged satellite and in situ global daily sea surface temperature
- MRI:
Meteorological Research Institute
- nNLM:
Nearshore nonlarge meander path
- oNLM:
Offshore nonlarge meander path
- SDH:
Surface dynamic height
- SIC:
Sea ice concentration
- SLA:
Sea level anomaly
- SLD:
Sea level difference
- SSH:
Sea surface height
- SST:
Sea surface temperature
- tLM:
Typical large meander path
- T–S:
Temperature and salinity
Rights and permissions
About this article

Cite this article
Hirose, N., Usui, N., Sakamoto, K. et al. Development of a new operational system for monitoring and forecasting coastal and open-ocean states around Japan. Ocean Dynamics 69, 1333–1357 (2019). https://doi.org/10.1007/s10236-019-01306-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10236-019-01306-x