
Abstract
Roads are a nearly ubiquitous feature of the developed world, but their presence does not come without consequences. Many mammals, birds, reptiles, and amphibians suffer high rates of mortality through collision with motor vehicles, while other species treat roads as barriers that reduce gene flow between populations. Road effects extend beyond the pavement, where traffic noise is altering communities of songbirds, insects, and some mammals. Traditional methods of mitigation along roads include the creation of quieter pavement and tires and the construction of physical barriers to reduce sound transmission and movement. While effective, these forms of mitigation are costly and time-consuming. One alternative is the use of learning principles to create or extinguish aversive behaviors in animals living near roads. Classical and operant conditioning are well-documented techniques for altering behavior in response to novel cues and signals. Behavioral ecologists have used conditioning techniques to mitigate human–wildlife conflict challenges, alter predator–prey interactions, and facilitate reintroduction efforts. Yet, these principles have rarely been applied in the context of roads. We suggest that the field of road ecology is ripe with opportunity for experimentation with learning principles. We present tangible ways that learning techniques could be utilized to mitigate negative roadside behaviors, address the importance of evaluating fitness within these contexts, and evaluate the longevity of learned behaviors. This review serves as an invitation for empirical studies that test the effectiveness of learning paradigms as a mitigation tool in the context of roads.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Rapid development, urbanization, and human population growth are drastically altering the habitats in which animals dwell (Donnelly and Marzluff 2006). As a result, cognitive responses to environmental cues that once provided fitness advantages are becoming increasingly irrelevant and even deleterious (Sih 2013; Swaddle et al. 2015). Mismatched cognitive responses to cues are common alongside transportation corridors, where failure to recognize the physical danger of vehicular traffic results in high rates of mortality for many organisms (e.g., Baskaran and Boominathan 2010). Aversive responses in other organisms cause them to vacate potentially good habitats far beyond the road edge, likely due to the high levels of noise radiating from the engines of passing vehicles and the friction between tires and the road surface (Braun et al. 2013). In both cases, the negative impacts of road networks have been observed at the population and community level in many animals (Kociolek et al. 2011; Fahrig and Rytwinski 2009).
As mounting evidence suggests that roads negatively impact animals, biologists must increasingly seek ways to mitigate their impacts. Ideally, transportation corridors would be completely redesigned to minimize the opportunity for collisions and to dampen noise. Along these lines, environmental engineers are developing quieter tires, engines, and road surfaces where economically feasible (Nijland et al. 2003). Wildlife managers have erected fences along especially problematic collision areas and provided crossing structures for wildlife to pass above or below the road (Glista et al. 2009). While successful, these types of mitigation measures are expensive and time-consuming and are unlikely to be implemented along any sizable percentage of the vast worldwide network of roads. As such, biologists and wildlife managers must extend their toolset to incorporate new methodologies that compliment these traditional mitigation methods.
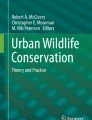
To date, mitigation of road effects has focused primarily on physical constraint: by either physically preventing animals from venturing over paved surfaces or by blocking sound with walls and vegetation. However, the vast majority of animal behavior is dictated by cognitive processes rather than only physical constraints. In most cases, cognitive processes are informed by past experiences or learning. A vast literature reveals that animal behavior is plastic, and can be modified through intentional conditioning paradigms (Domjan 2010). Behavioral techniques have been used regularly in the management context (reviewed by Greggor et al. 2014), but have received little attention in the context of roads. Our objective is to evaluate the potential for applying learning principles to create aversion to roads in animals that regularly collide with vehicles, and reduce aversion in animals that avoid otherwise good habitats that are near but not directly adjacent to road surfaces (Fig. 1). Because our target audience is broad, ranging from experts in learning principles and animal cognition to wildlife managers, we begin with a brief overview of (a) road effects on animals and (b) learning principles. To demonstrate the application of these principles, we then describe three non-road conservation contexts where learning principles have been applied, often successfully, to mitigate wildlife management issues. Finally, we turn our attention to roads, evaluating theoretical applications, potential challenges, and necessary correlate studies to verify successful implementation of road-related learning programs. We do not intend to provide an exhaustive review of all potential applications, but rather, to develop a conceptual framework with some concrete examples that are ripe for development.

Visual depiction of road effects on animals and the accompanying objectives for learning programs designed to improve cognitive responses along transportation corridors. Near-road zones are best avoided to reduce the probability of vehicular collision, although crossing structures that support population connectivity will require specialized techniques to extinguish fear near these structures. More distant habitats may be reopened to species currently averse to noise through learning paradigms, although monitoring of fitness will be required to ensure these do not represent sink habitats
The effect of roads on animals
Demographics
The adverse effects of roads on animal populations impact every group of terrestrial vertebrates (Fahrig and Rytwinski 2009) and likely extend to aquatic and invertebrate organisms as well. Many large mammals are prone to catastrophic collisions with motor vehicles (Bruinderink and Hazebroek 1996), resulting in high human financial burdens and the potential loss of animal and human life. Unfortunately, densities of some ungulates, such as white-tailed deer (Odocoileus virginianus), are positively related to road density (Munro et al. 2012). Reasons for high collision rates in ungulates include regular large-scale movement, large territories that cross road boundaries, and attraction to salty waste and warmer temperatures on road surfaces (Cramer et al. 2015). Other species, such as grizzly bears (Ursus arctos), are more likely to avoid high-use roads (Northrup et al. 2012; Holderegger and Di Giulio 2010). As a result, roads can represent movement barriers, isolating populations, and reducing genetic diversity (Shepard et al. 2008). The effects on small mammals are somewhat less defined. Some populations of white-footed mice (Peromyscus leucopus) increase near roadways, potentially due to the increased presence in small patches of edge and open habitats or due to the decline in predator populations (Downing et al. 2015). However, mortality rates remain high in other small mammal species (Grilo et al. 2008), and avoidance has been observed in some species (Chen and Koprowski 2015). Reptile and amphibian populations almost universally decline near roads (Cosentino et al. 2014; Row et al. 2007). Mechanisms include: slower moving organisms crossing roadways to reach vernal ponds for reproduction, sensitivity to road salts and other contaminants along road edges, and reliance on acoustic communication in some anuran species (Jochimsen et al. 2004). Reliance on acoustic communication also appears to be the primary driver of altered roadside demographics in songbirds (McClure et al. 2013). This well-studied taxa exhibits variable responses to roads, but many species avoid roadside habitats well beyond the distances directly impacted (>1 km, Reijnen and Foppen 2006). Masking of communication is among the most likely mechanism for roadside aversion, although distraction (Chan et al. 2010; Quinn et al. 2006) and perceiving noise as a threat may underlie some of the more far-reaching effects of roads (Francis and Barber 2013). In sum, demographic changes near roads are varied across terrestrial species, but the majority of studied organisms experience negative impacts (Fahrig and Rytwinski 2009).
Behavior
Maladaptive animal behavior in response to roads can be placed broadly into two categories: (1) lack of fear when fitness consequences are real and (2) unnecessary aversion or fear of roadside habitats as a result of novelty or perceived threat (often due to noise). The former category generally results in direct mortality when the organism fails to perceive the danger of a passing vehicle. In many cases, the cost of collision affects both human well-being and animal population persistence, with documented road-altered population trends in many large mammal species (Cramer et al. 2015). In addition, declines in already small populations or rare mammal species could be exacerbated by road mortality. Amphibians and reptiles are often killed in high numbers as they cross roads in route to breeding habitats (e.g., Baskaran and Boominathan 2010). Whether road-associated danger is perceived in these organisms is unknown, although reproductive efforts may necessitate movement even if danger is apparent. Thus, the observed behavioral response to roads in many species is best described as a lack of response. This behavioral inattentiveness may be due to the recent evolutionary appearance of roads on the landscape. Organisms simply do not possess enough historical experience with roads to respond to them correctly. One empirical example comes from research conducted by St Clair (2003) who examined the willingness of songbirds to cross forest gaps. Roads were crossed more regularly than similarly configured rivers, suggesting that road crossings were perceived to be less risky than more familiar landscapes. In some cases, resources near roadways result in organisms actively selecting roadside habitats. For example, modeling moose (Alces alces) movement in Quebec, Canada, revealed that the presence of roadside salt pools was positively correlated with the number of road crossings (Grosman et al. 2009).
In contrast, many species are strongly averse to roadside habitats. While seen across a number of taxa, songbirds appear to be especially prone to avoid these areas. Aversive behavior appears justified in close proximity to high-use roads as elevated noise (>65 dB) can impact body condition (Ware et al. 2015), reproductive fitness (Kight et al. 2012; Halfwerk et al. 2011), and potentially life span (Meillere et al. 2015). However, noise levels often do not regularly exceed these thresholds on many low and moderate use roads. Additionally, noise levels generally fall below this level well before the one kilometer zone of effect observed for many songbirds (McGregor et al. 2013). Francis and Barber (2013) suggest that noise avoidance in zones where masking is not an issue is related to the perception of noise as a threat. Again, this potentially maladaptive behavior may be due to the recent evolutionary appearance of roads. Indirect evidence for this phenomenon can be found in a multi-continent comparison of bird traits facilitating urban tolerance (Cardoso 2014). Species in Europe were generally more tolerant of urbanization than those in North America, potentially due to the longer duration of urbanization in Europe, and thus, the longer period of time to adapt behaviorally. Further, many successful urban species are altering their behavior in ways that may reduce the deleterious effects of roads. Birds, for example, alter the timing (Fuller et al. 2007), amplitude (Brumm 2004), and pitch (Slabbekoorn and Peet 2003) of their songs near roadways. Given enough time, we may expect more species to respond appropriately to roads. However, as species numbers decline and human costs due to collisions continue to add up, we ask whether there is a better way. Specifically, can we use learning principles to train wild populations of animals to behave differently?
Primer to learning principles
Fear and conditioning
Pavlovian, or classical, conditioning is essentially the physiological and psychological science of learning by association (Pavlov 1927). The subfield of classical conditioning most germane to wildlife management in a changing world is fear conditioning, wherein organisms learn that particular stimuli in the environment predict aversive events (Maren 2001). This tends to lead to various fear and anxiety responses in response to what might otherwise be innocuous stimuli (what becomes the Conditioned Stimulus, or CS) when those stimuli occur in close temporal and spatial proximity to painful or otherwise unpleasant outcomes (the Unconditioned Stimulus, or US). By way of simple example, an animal that is nearly hit by a car on a road (the US) might hopefully come to fear roads (the CS) in the future. This association then tends to lead to operant conditioning of outward behaviors, such as avoidance of the road or increased speed of traversal of roads, that both decrease the animal’s level of classically conditioned anxiety and its likelihood of encountering the same unpleasant outcome in the future.
There are a number of caveats to conditioning that must be considered in the context of learning stimulus-fear associations. First, the relevance of the stimulus to the outcome plays an important role in how easily the two become associated (Garcia and Koelling 1966). This is part of what drives the evolutionarily derived differences in what cues animals fear: For example, anthropogenic noise might be more readily associated with an unpleasant event than the presence of a road. Second, inhibitory associations can also be formed when stimuli commonly do not result in the target aversive outcome (Rescorla 1969). This leads to inhibition of fear in the presence of stimuli that normally predict no aversive event, and can even lead to retardation of acquisition of excitatory (fearful) associations (e.g., Hammond 1968): for example, an animal that traverses a quiet road on a regular basis would be less likely to associate the road with a later traffic incident than an animal that had not previously encountered a road before attempting to cross it. Finally, even strong conditioned responses can be decreased if future presentations of the neutral stimulus are not followed by the aversive outcome, a process called extinction (e.g., Schiff et al. 1972); conditioned responses can even be reversed by pairing the stimulus with pleasant events (e.g., presentation of food), which is termed counterconditioning (Pearce and Dickinson 1975).
Fear conditioning is a normal and highly important evolutionary process in animals; it allows animals to predict dangerous events in the environment based on the stimuli that commonly precede them. However, there are a number of issues that can arise in this learning process that are maladaptive, largely owing to the increasingly unpredictable world that animals inhabit. While learning processes are rapid and flexible compared to the evolution of instincts, learning still takes time, and animals cannot always determine based on single trials what they should fear or how they should respond in the future. This can prevent animals from learning what they should fear before mortality occurs, or contrarily can lead animals to fear wide varieties of stimuli before they can determine the particular environmental cues that signal danger. Exposure to uncontrollable aversive stimuli commonly leads to learned helplessness, whereby an animal that can determine no response that prevents or terminates an unpleasant stimulus may show activity deficits (Anderson et al. 1979; Anisman et al. 1978) and attentional deficits (Maier et al. 1987) in a manner that has been compared to depression in humans (Maier and Seligman 1976; Maier et al. 1969; Seligman et al. 1971). Fear is also stressful, and while learning fear allows animals to target fear, sometimes animals develop fears to enough stimuli that they experience chronic stress. Chronic levels of stress are associated with a wide variety of negative physiological effects such as hypertension and decreased immune functioning (e.g., see Miller et al. 2007). It is thus important that animals are able to learn when not to be scared; that is, to determine what stimuli signal that danger is unlikely to occur such that they can decrease vigilance and rebound from stress for periods of time.
Cue-mediated fear in the natural world
If we aim to condition an association between roads and fear responses, we must be confident that animals are capable of utilizing cues in their environment to mediate fear. In the natural world, many behaviors, such as recognizing and responding to predators, are triggered by cues. One of the most prominent examples is the use of mobbing calls, which facilitate swarming of a nearby predator and are ultimately important for animals to survive in their environment. To be effective, mobbing calls must contain specific characteristics that animals can use to assess the threat posed by a predator. Templeton et al. (2005) found that chickadees visually assess predator threat based on body size and wingspan. Acoustically, black-capped chickadees (Poecile atricapilus) produced chick-a-dee mobbing calls containing more D notes to smaller live owls and hawks. This response is thought to occur as smaller predators pose a higher threat since they can easily maneuver through the trees during the pursuit of their prey. When the experimenters played back chick-a-dee mobbing calls without visual stimuli, they found that chickadees mobbed longer and more intensely when the playback was of mobbing calls produced in response to a small predator than of the mobbing calls elicited by a large predator or control vocalizations. Chickadees also approached the speaker more closely during the playback of mobbing calls elicited by a small predator. Tufted titmice (Baeolophus bicolor) have also been shown to produce a similar chick-a-dee call in which they convey information about predator size and threat by producing longer mobbing bouts with more D notes per call to mounts of smaller, higher threat predators (Courter and Ritchison 2010).
Animals also use non-auditory cues to assess threats in the natural world. Book and Freeberg (2015) found that foraging songbirds not only responded to the presence of cats, but also behaved differently based on head and body orientation. Tufted titmice were observed at feeding stations where cat models were placed with head and body orientations manipulated to either face toward or away from the feeding area; a tree branch was placed in the same location for the control condition. Titmice produced more introductory notes during the cat facing trials than facing away or control conditions. Although less intense than cat facing trials, cat away trials generally elicited stronger response than controls. Specifically, titmice produced more D notes when cat models were present. Previous experience with cats also played a role, with stronger responses elicited from birds that regularly encountered cats in their environment before experimental initiation. Feeding behavior was also altered such that titmice avoided feeding stations more often when the cat model was facing the feeder than when it was facing away and less often in the control condition than in either cat present trial. These results indicate that there may be a socially learned component in threat detection and that avian species may be capable of assessing threat at a rather sophisticated level. Taken together, these two examples demonstrate that birds regularly use sensory cues for mediating fear responses in the natural world. Additional examples are also plentiful for other taxa and senses (see review by Blumstein and Berger-Tal 2015).
Current application of learning principles in management of animals in non-road ecological contexts
The integration of behavior and wildlife management to further conservation objectives is not a novel concept. A recent review by Berger-Tal et al. (2015) found reasonably high levels of integration between the two fields, but noted that certain behavioral concepts remain underexplored. Principles of learning were among the concepts rarely applied. In this section, we describe a handful of studies that have attempted to condition wild animals via novel pairing of stimuli to create new associations that have been, or could be, applied in the management context. While not addressing the road context explicitly, each of these examples employs foundational learning principles that could be applied to management issues related to roads. Further, each topic provides tangible evidence of the powerful outcomes that can result from the application of learning principles to ecological management.
Predator–prey interactions
Using learning principles in an applied conservation setting has been attempted recently to reduce mortality incurred from consuming highly poisonous cane toads (Rhinella marina). Laboratory presentation of cane toads to hatchling crocodiles (Somaweera et al. 2011) and naïve dasyurids (Webb et al. 2008) induced sustained aversion to ingestion of cane toads in the individuals that survived. Price-Rees et al. (2011) set out to induce a conditioned taste aversion in the blue-tongued skink (Tiliqua scincoides intermedia) by linking cane toad consumption with nausea. Experimental results were promising, resulting in avoidance behavior as a result of both nausea-inducing agents and cane toad flesh. Upon release, trained individuals were more likely to survive (Price-Rees et al. 2013), and recent use of in situ training has also increased survivorship (Ward-Fear et al. 2016).
Magrath et al. (2015) provided another excellent example of using principles of learning to alter bird behavior in a manner that could be applied to a conservation setting. The authors attempted to induce a conditioned fear in superb fairy-wrens (Malurus cyaneus), specifically, by pairing auditory stimuli with the presentation of an overhead presentation of a predator. The design of this particular experiment was elegant and effective (see Sturdy and Proppe 2015). Magrath et al. ensured, through baseline testing, that there were no pre-existing biases of their subjects, and in choosing their stimuli selected a vocalization that was unfamiliar to their subjects along with a stimulus that was acoustically distinct. These controls were critical to interpretation of their results. Had either a familiar or acoustically similar stimulus been employed, concluding that a new association between the stimuli and the predator model presentation had been established would be problematic. Magrath et al. convincingly showed that following their training protocol, experimental birds consistently and overwhelmingly fled to cover when later tested with presentations of the trained “alarm” calls. Importantly, this association was durable, and when tested again a day later, the majority of birds once again fled with no additional training. Results from Magrath and colleagues’ work with birds along with Price-Rees and colleagues’ work with lizards demonstrating effective use of conditioned fear and conditioned taste aversion provide proof of principle and encouragement that learning principles applied in a manner appropriate for the target species could be used to mitigate species decline in a targeted fashion, although questions regarding retraining and the time to extinction of trained behaviors have much room for development.
Species reintroduction
Captive breeding programs have become a common practice in response to the declining wild populations in many species. However, animals raised in captivity learn within a dramatically different environment than their wild counterparts, often leading to low survivorship after they are released (Swaisgood 2010). For example, endangered swift foxes (Vulpes velox) that approached a novel object boldly in captivity were less likely to survive upon release than those that were naturally leery of novel objects (Harrison et al. 2004). The authors suggest that boldness in the face of novel objects resulted in a poor fear response to vehicular traffic, often resulting in death of the animal. Thus, selecting animals based on particular behavioral traits may enhance success of reintroduction efforts. While domestication can negatively impact natural behaviors, positive effects such as more appropriate interaction with humans can also be induced. For example, although closely related to foxes, domestic dogs are better at perceiving and responding to human signals (Hare et al. 2005), and yet foxes trained to approach and interact with humans over many generations were more capable of interpreting human signals than non-trained foxes.
Learning has also been used directly to condition desired traits. Hume (1995) used learning to instill fear of feral cats (Felis catus) in New Zealand black stilts (Himantopus novaezealandiae). The black stilt was, and remains, one of the rarest wading bird species; thus, conservation efforts are critical. However, captive-raised black stilts had little historical or recent experience with cats, a recently introduced mammalian predator. Hume used classical conditioning to provide antipredator training (i.e., teaching animals to recognize predators as dangerous) to black stilts by pairing moving cat model presentations (CS) with alarm calls (US). Compared to trained birds, untrained birds foraged more, maintained less distance from the cat model, and decreased the frequency of upright postures in post-tests. Unfortunately, upon release mortality rates were high and not related to training regime. A second experiment investigated the ability of juvenile stilts (~1 month) to distinguish between predator and control models. After antipredator training, black stilts remained farther away and attempted to escape more often in the presence of cat models. Alarm calling and escape behavior increased, while head bobbing, potentially related to foraging, decreased post-training. A series of post-conditioning trials revealed that much of the trained behavior waned by 8 months, although the stilts did maintain more distance from the cat model. While training did not significantly alter post-release survivorship, it did alter black stilts’ response to cats, at least for a short period. This supports the need for additional experimental tests of species-specific antipredator training paradigms to facilitate successfully reintroducing captive species into the wild. Exploring options for retraining under field conditions and understanding whether behaviors learned in the laboratory are generalized to slightly different stimuli found under natural conditions will also be important.
In a more successful case, captive-raised quokkas (Setonix brachyurus) were taught to avoid fox predators by inducing fear of dogs during captivity (McLean et al. 2000). Similarly, little owls were conditioned to avoid goshawks prior to release (Alonso et al. 2011), and white-lipped peccaries (Tayassu pecari) were trained to forage by providing unpredictable feeding regimes (Nogueira et al. 2014). Although understudied, learning paradigms have been suggested prior to reintroduction for amphibians and reptiles (Michaels et al. 2014). One of the most visible and successful reintroduction programs is that of the endangered whooping crane (Grus americana). In recent years, a new migratory population has been established through the intentional conditioning of learned behaviors, including imprinting and migration (Urbanek et al. 2010). While challenges certainly remain, it is clear that learning principles are already embedding successfully in reintroduction programs.
Human–wildlife conflict
Bears are often attracted to human environments, generally in the pursuit of food. However, most humans consider encounters with bears to be undesirable. As a result, managers are often tasked with intervening. While extermination of troublesome bears might be the simplest solution, many bear species are declining or already endangered. Managers must seek solutions that harm neither humans nor bears. In many instances, biologists have turned to aversive conditioning. For example, chasing and pepper spraying bears seeking food in Sequoia National Park was successful at preventing food conditioning and well over half the bears already conditioned to food abandoned this behavior (Mazur 2010). Unfortunately, not all programs have experienced this level of success. Leigh and Chamberlain (2008) found conditioned bears generally returned to their nuisance behavior within 5 months of being conditioned. Currently, the value of aversive conditioning in problematic bears remains uncertain, but additional studies using learning principles may yet prove to be effective.
Ungulates are another group of large mammalian species that regularly conflict with humans and human interests. Aversive conditioning was used on elk (Cervus elaphus) populations in Banff National Park to successfully reduce elk encroachment on the town of Banff, Alberta, Canada (Kloppers et al. 2005). In this case elk were conditioned by being chased by dogs or humans, designed to simulate predatory pursuit. Some have suggested another potentially effective, but also controversial, management technique: using hunting methods to create fear in problematic ungulates (Cromsigt et al. 2013). This would include less predictability in the timing of hunts and more randomly targeting members of all age classes in a population. While promising, the outcomes of such techniques are still forthcoming.
Learning applications for the mitigation of road impacts
While anthropogenic changes are detrimental for a high number of animal species, there is growing evidence that many species are learning to survive in modified landscapes (Samia et al. 2015). Across vertebrate taxa, urban populations of many species exhibit less fear and aversion to humans than rural populations. The extinction or reduction of fear in these cases is promising, but when left to occur organically these processes are slow. Below we detail a few examples where the intentional application of learning principles could either enhance or reduce fear associated with roads in a way that benefits both human and animal populations.
Inducing aversion to roads
In many cases, the novelty of roads results in undeveloped fear responses, with detrimental outcomes for both animal and human systems (see “Introduction” section). One prime example is the white-tailed deer, an ubiquitous species throughout much of North America. Despite its regular presence, road crossing often occurs at higher rates in particular areas, potentially due to somewhat predictable external factors such as verge vegetation, road density, and presence of water (Ng et al. 2008). As such, programs that pair the presence of a road with a fear-inducing stimulus could be applied in reasonably small, problematic regions, although concurrent monitoring efforts should be employed to ensure the problem is not merely shifted elsewhere. To date, attempts at inducing fear of roads are few and far between, and relatively ineffective. But failed stimuli, which include high-pitched whistles, flagging, and reflectors (Mastro et al. 2008), do not likely represent salient cues. Rather than abandoning a learning paradigm, we suggest more research be conducted to determine which stimuli would be most salient. One potential example is the sound of a shotgun. When hunting activity occurs in a landscape, deer spatially avoid areas where hunting is known to occur (Kilpatrick et al. 2002; Williams et al. 2008), and as a result avoid open habitats, including those found alongside roads (Kilgo et al. 1998). This behavioral aversion appears to reduce the number of vehicular collisions shortly after the opening of the hunting season (Sudharsan et al. 2006). Thus, motion detectors placed near particularly problematic road crossings that trigger playback of an audible shotgun sound when triggered could deter deer from roads by reinforcing an already present fear response, and perhaps quickly build an association between the sight of roads and a fearful situation. During development, it would be important to investigate directionality of deer flight responses to determine the ideal placement of the sound-producing source.
The use of loud noise may be problematic in some regions with high human populations, although experimentation with lower-amplitude stimuli and less regular presentation could make this procedure less socially averse. For example, the sound of a bull whip crack has been used to condition lasting aversion to foraging in western gray kangaroos (Macropus fulignosus) (Biedenweg et al. 2011). However, in populous regions another learning tool is already being used to create fear aversion in domestic dogs: the shock collar. In addition to their widespread commercial use for dogs, shock collars combined with invisible fences have been used successfully to condition both cattle (Lee et al. 2007) and wolves (Rossler et al. 2012) to avoid baited food troughs, with aversive behaviors lasting >40 days post-treatment. Virtual fencing technology is developing quickly and will likely become commonplace in the conservation context (Jachowski et al. 2014) both as a physical barrier and as a tool for aversive conditioning. Implementation along road corridors could induce restraint and fear in deer and other organisms without the use of a noisy stimulus. Under this regime, however, direct management would be limited to particular areas where invisible fences could be erected, and to a particular subset of collared animals that would experience a shock stimulus as they approached roadways. Fortunately, social effects may extend learned behavior well beyond the targeted individuals.
Given that learning techniques must target specific areas and individuals, and that their continued use does not come without financial cost, two additional aspects of learning warrant additional assessment in the road context. First, as mentioned previously, learned associations must be reinforced periodically with the expected outcome. Without this reinforcement, the trained response will decrease over time. But the level and regularity of reinforcement is likely to vary greatly between species and circumstances. Using stimuli that regularly occur on the landscape and are already associated with the desired fear response is beneficial in this regard. However, determining the longevity of the learned road-fear association will be vital. This information will be useful for establishing the minimum duration of training, the maximum acceptable time lags between training events, and ultimately the feasibility of these techniques.
Second, although limited time and money prevent the training of all individuals in any particular population, animals can also learn from each other (Whiten et al. 1999). Through social transmission, a particular behavior can be spread from only a few individuals to an entire population over a relatively short period of time. For example, at the beginning of the twentieth century, tits in Europe were occasionally observed opening milk containers, but within 20 years the practice became commonplace across several regions and species (Hinde and Fisher 1951). More recent experimental work has shown that social networking facilitates important behaviors in a wide range of animal species, including the development of new foraging strategies in whales (Schakner et al. 2014), locating new foraging sites in songbirds (Farine et al. 2015), and the spread of fear in rats (Jones et al. 2014). Similar processes are thought to underlie the development of regional bird dialects (Marler and Tamura 1964) and tool use by dolphins (Krutzen et al. 2005), and facilitate foraging in marmosets (Bugnyar and Huber 1997) and other organisms. Interestingly, in the well-studied case of opening milk containers, direct observation of the behavior did not appear to be necessary for transmission (Sherry and Galef 1984) and transmission rates accelerated over time (Lefebvre 1995). In some cases, transmission occurs primarily during development. Songbirds, for example, learn the majority of their vocalizations from conspecifics during a critical period during developmental (Marler 1970). In other cases, social learning can be limited to particular individuals, such as those that are kin or more dominant (Laland 2004; Rendell et al. 2011). Taken in whole, this promising aspect of behavior suggests that road aversion could quickly transmit both horizontally (between individuals) and vertically (parent-offspring) through a population even if conditioning took place in a small percentage of animals.
One final point that must be addressed in this context is connectivity. Roads often act as barriers to movement, reducing genetic diversity and potentially population viability (Coffin 2007). These effects are evident in many taxa, but are perhaps most easily demonstrated in herpetofauna. Because many of these organisms must pass regularly between aquatic and upland portions of their habitat to breed, and roads often utilize the less variable geography found along these interfaces, the inability to cross roads can easily result in reproductive failure. Some species already avoid roads, potentially to their detriment (Shepard et al. 2008), but others cross in mass, often in predictable locations (Langen et al. 2009). Creating aversion to roads is hardly a holistic solution for such populations. In fact, current solutions target a more permeable roadway by providing safe passage via crossing structures that run over or under the roadway (reviewed in Beckmann et al. 2010). A more amenable learning strategy might include the concurrent use of two paradigms: creating fear along much of the road edge and extinguishing fear in the proximity of crossing structures. For herpetofauna, combining multiple chemosensory cues (Mason and Parker 2010; Woodley 2010), indicative of predators for repulsion and mating opportunities for attraction, may be the most salient set of stimuli. Another possibility in anurans is the use of audible cues. Recently, James et al. (2015) demonstrated that playback of conspecific calls can be used to redistribute frog populations toward higher use of areas near call playback. Perhaps playback can be used near crossing structures for a period of time to increase the cognitive association of these crossing structures as places of safe passage. However, if the objective is for longer-term learning it to occur, it may also be important to include distinct visual stimuli that remain present near crossing structures post-playback, facilitating the recognition of these safe passageways as distinctively different from other roadside locations. Similar combinations of aversion and attraction could be used to condition mammals and other species near crossing structures.
Extinguishing fear of road-associated noise
The majority of the US landmass is affected by noise produced from human sources (Mennitt et al. 2013), but only a portion of these areas are subject to noise levels that heavily mask communication. Yet, some mammals and many species of birds avoid roads at distances far beyond this masking zone (McGregor et al. 2013). Novelty and fear are the most plausible explanations for avoidance in these areas, most likely due to an evolutionary association between noise and danger or low quality habitat (Sih 2013). Learning principles (i.e., counterconditioning) could reasonably be employed by pairing a new and rewarding stimulus with noise to extinguish the current fearful association. Again, selection of the introduced stimulus is important. Ideal stimuli are biologically salient, relatively inexpensive to produce, and can be encountered in nature to maintain learned behavior. One option for birds is the use of conspecific song playback as a signal that can potentially extinguish fear in the presence of road noise. This signal is commonly used by songbirds to assess habitat quality, generally being perceived as an indicator of safe, high-quality habitat (Ward and Schlossberg 2004). The use of conspecific attraction appears to be widespread among migratory songbirds, who select both breeding and wintering ranges annually. Recently, work from DeJong et al. (2015) demonstrated that song playback could be used to increase territory establishment in an entire community of songbirds, although some species whose songs were not played back became less common. It is yet to be seen whether song playback continues to increase territory establishment when paired with road noise. However, if playback successfully extinguishes or overrides the current propensity of many species to avoid areas with anthropogenic noise, we may see enhanced use of noise-affected but otherwise high-quality habitats along roadways. In addition, the salience of song playback is regularly reinforced through natural interactions in the environment, potentially sustaining the learned association between noise and safety for longer periods of time than would be otherwise expected. Of course, experimental work will be needed to test this prediction.
While song playback and other cues hold potential as behavioral methods to rapidly extinguish the fear of anthropogenic noise in birds and other animals, the application of such principles must be accompanied by a thorough examination of survivorship and reproductive success in newly utilized areas. The fitness impacts of noise beyond regions where masking of communication occurs are unclear, but it is unwise to assume they are non-existent. One must consider that removal of previous fear associations has the potential to attract animals to new regions that function as sinks (Stamps 2001). In other words, animals may preferentially select habitats that are ecologically subpar, reducing individual survivorship or reproductive success. Known examples of sinks include small woodlots for some forest songbirds (Burke and Nol 2000) and hunted ranches for sheep (Novaro et al. 2005). Distraction is one potential mechanism that could facilitate sink dynamics in noisy locals, by altering vigilance patterns, resulting in higher predation or lower foraging (Chan et al. 2011, Quinn et al. 2006).
On the other hand, laboratory studies have shown that altering behavior through learning principles can positively impact reproductive success. For example, Hollis et al. (1997) found that training male blue gouramis (Trichogaster trichopterus) to anticipate female presence reduced their initial aggressive, territorial responses to females under natural conditions and allowed them to mate more quickly and regularly, resulting in the production of more young. More recently, Adkins-Regan and MacKillop (2003) found that copulation between Japanese quail (Coturnix japonica) trained to expect the presence of an individual of the opposite sex resulted in a greater number of fertilized eggs. Both of these studies show that (1) behavioral manipulation can enhance reproductive success by damping maladaptive reproductive responses, and (2) stimuli that directly enhance courtship interactions may be desirable. In the case of anthropogenic noise, reducing fear may also lessen noise-associated stress, potentially dampening the negative physiological consequences of stress (Miller et al. 2007). Thus, the potential existence of sinks should not discourage researchers from pursuing mitigation techniques that use learning techniques, but should serve as reminder that the careful investigation of both proximal and ultimate questions is required before widespread implementation is attempted.
Conclusion
The need to test hypotheses regarding both proximal and ultimate questions highlights one of the potential challenges and exciting opportunities for implementing learning protocols in the management of animals in a changing world: We must integrate the vast amount of historical and cutting-edge knowledge developed by practitioners working with learning principles with the most advanced understanding of ecological principles currently utilized by ecologists and wildlife managers. New collaborative efforts between experts in divergent yet related fields of expertise, such as those held by the multiple authors on this paper, can facilitate the development of new tools to help animals learn to cope in a rapidly changing world. One mechanism for integrated approaches is to combine laboratory and field techniques to develop more robust management solutions. Laboratory experiments can isolate paired stimuli to directly test the effects of learning without interacting variables in a way unavailable to field biologists. Conversely, field studies confirm whether effective training in laboratory experiments remains potent among the myriad of interacting variables found in nature. Another specific example of this collaborative potential is the selection of relevant stimuli for learning experiments. A recent review by Blumstein and Berger-Tal (2015) sets forth a number of reasons why modifying behavior through sensory stimuli may be ideal. But elements of this knowledge for any particular species may dwell in disparate regions of the literature and university departments. Bringing diverse experts together will most efficiently conjoin these details.
Certainly, the specific stimuli and methodology will vary broadly based on the species and objectives in each situation, but some of the principles put forth here may applicable in many cases. First and most importantly, we encourage collaborating psychologists, ecologists, and wildlife managers to consider behavioral mitigation options, particularly the implementation of learning principles to create or extinguish fear of roads. Second, we suggest an in-depth review of the behavioral ecology of the species of concern and the surrounding community of organisms to evaluate a priori any potential negative impacts of adding a new stimulus to the landscape. Third, time must be invested in determining what stimulus is ideal. We suggest the most promising stimuli are those that are already common on the landscape and are already associated with the desired outcome (i.e., fear or safety).
Finally, we suggest that implementation should include thorough monitoring programs to evaluate the success of the desired outcomes. In this light, we recommend pursuing an adaptive management approach, being willing to attempt novel experiments on small scales without complete knowledge of all implications (Walters and Hilborn 1978; Holling 1978). For example, if the salience of a particular stimulus has not been thoroughly vetted for a particular species, it may be worthwhile to proceed with learning experiments. We suggest this approach because the environment in which animals dwell is changing rapidly and many populations are declining quickly. Waiting for additional research is a luxury no longer available in many cases. If experiments fail in a few small areas, the damage to global populations or communities is not likely to be significant. Conversely, small-scale successes may be feasible at much larger scales, holding the potential to rapidly mitigate road effects for some species. Teaching animals when to fear and not fear roads and their associated noise could save animal lives, drastically reduce the human tragedy associated with vehicular collisions, and reopen vast tracts of habitable land. We are hopeful that this review will serve as a call to action for pursuing novel, out-of-box methods for mitigating the increasingly negative impacts of our transportation systems. We are eager to observe and participate in the continued interdisciplinary, collaborative efforts to retrain animals to respond to roads more appropriately.
References
Adkins-Regan E, MacKillop EA (2003) Japanese quail (Coturnix japonica) inseminations are more likely to fertilize eggs in a context predicting mating opportunities. P Roy Soc B-Biol Sci 270:1685–1689. doi:10.1098/rspb.2003.2421
Alonso R, Orejas P, Lopes F, Sanz C (2011) Pre-release training of juvenile little owls Athene noctua to avoid predation. Anim Biodiv Conserv 34:389–393
Anderson DC, Crowell CR, Cunningham CL, Lupo JV (1979) Behavior during shock exposure as a determinant of subsequent interference with shuttle box escape–avoidance learning in the rat. J Exp Psychol Anim Behav 5:243–257. doi:10.1037/0097-7403.5.3.243
Anisman H, DeCatanzaro D, Remington G (1978) Escape performance following exposure to inescapable shock: deficits in motor response maintenance. J Exp Psychol Anim Behav 4:197–218. doi:10.1037/0097-7403.4.3.197
Baskaran N, Boominathan D (2010) Road kill of animals by highway traffic in the tropical forests of Mudumalai Tiger Reserve, southern India. J Threat Taxa 2:753–759
Beckmann J, Clevenger AP, Huijser MP, Hilty JA (2010) Safe passages: highways, wildlife, and habitat connectivity. Island Press, Washington
Berger-Tal O, Blumstein DT, Carroll S, Fisher RN, Mesnick SL, Owen MA, Saltz D, St. Claire CC, Swaisgood RR (2015) A systematic survey of the integration of behavior into wildlife conservation and management. Conserv Biol doi: 10.1111/cobi.12654
Biedenweg TA, Parsons MH, Fleming PA, Blumstein DT (2011) Sounds scary? Lack of habituation following the presentation of novel sounds. PLoS One 6:e14549. doi:10.1371/journal.pone.0014549
Blumstein DT, Berger-Tal O (2015) Understanding sensory mechanisms to develop effective conservation and management tools. Curr Opin Behav Sci 6:13–18. doi:10.1016/j.cobeha.2015.06.008
Book DL, Freeberg TM (2015) Titmouse calling and foraging are affected by head and body orientation of cat predator models and possible experience with real cats. Anim Cognit 18:1155–1164. doi:10.1007/s10071-015-0888-7
Braun ME, Walsh SJ, Horner JL, Chuter R (2013) Noise source characteristics in the ISO 362 vehicle pass-by noise test: literature review. Appl Acoust 74:1241–1265. doi:10.1016/j.apacoust.2013.04.005
Bruinderink GWTAG, Hazebroek E (1996) Ungulate traffic collisions in Europe. Conserv Biol 10:1059–1067. doi:10.1046/j.1523-1739.1996.10041059.x
Brumm H (2004) Causes and consequences of song amplitude adjustment in a territorial bird: a case study in nightingales. An Acad Bras Cienc 76:289–295
Bugnyar T, Huber L (1997) Push or pull: an experimental study on imitation in marmosets. Anim Behav 54:817–831. doi:10.1006/anbe.1996.0497
Burke DM, Nol E (2000) Landscape and fragment size effects on reproductive success of forest-breeding birds in Ontario. Ecol Appl 10:1749–1761. doi:10.1890/1051-0761(2000)010[1749:LAFSEO]2.0.CO;2
Cardoso GC (2014) Nesting and acoustic ecology, but not phylogeny, influence passerine urban tolerance. Global Change Biol 20:803–810
Chan AA, Giraldo-Perez P, Smith S, Blumstein DT (2010) Anthropogenic noise affects risk assessment and attention: the distracted prey hypothesis. Biol Lett 6:458–461. doi:10.1098/rsbl.2009.1081
Chen HL, Koprowski JL (2015) Animal occurrence and space use change in the landscape of anthropogenic noise. Biol Conserv 192:315–322. doi:10.1016/j.biocon.2015.10.003
Coffin AW (2007) From roadkill to road ecology: a review of the ecological effects of roads. J Transp Geogr 15:396–406. doi:10.1016/j.jtrangeo.2006.11.006
Cosentino BJ, Marsh DM, Jones KS, Apodaca JJ, Bates C, Beach J, Beard KH, Becklin K, Bell JM, Crockett C, Fawson G, Fjelsted J, Forys EA, Genet KS, Grover M, Holmes J, Indeck K, Karraker NE, Kilpatrick ES, Langen TA, Mugel SG, Molina A, Vonesh JR, Weaver RJ, Willey A (2014) Citizen science reveals widespread negative effects of roads on amphibian distributions. Biol Conserv 180:31–38. doi:10.1016/j.biocon.2014.09.027
Courter JR, Ritchison G (2010) Alarm calls of tufted titmice convey information about predator size and threat. Behav Ecol 21:936–942. doi:10.1093/beheco/arq086
Cramer P, Olsson M, Gadd ME, van der Ree R, Sielecki LE (2015) Transportation and large herbivores. In: van der Ree R, Smith DJ, Grilo C (eds) Handbook of road ecology. Wiley, West Sussex, pp 344–352
Cromsigt JPGM, Kuijper DPJ, Adam M, Beschta RL, Churski M, Eycott A, Kerley GIH, Mysterud A, Schmidt K, West K (2013) Hunting for fear: innovating management of human-wildlife conflicts. J Appl Ecol 50:544–549. doi:10.1111/1365-2664.12076
DeJong LN, Cowell SD, Nguyen TNN, Proppe DS (2015) Attracting songbirds with conspecific playback: a community approach. Behav Ecol 26:1379–1388. doi:10.1093/beheco/arv094
Domjan M (2010) The principles of learning and behavior. Wadsworth Publishing, Stamford
Donnelly R, Marzluff JM (2006) Relative importance of habitat quantity, structure, and spatial pattern to birds in urbanizing environments. Urban Ecosystems 9:99–117. doi:10.1007/s11252-006-7904-2
Downing RJ, Rytwinski T, Fahrig L (2015) Positive effects of roads on small mammals: a test of the predation release hypothesis. Ecol Res 30:651–662. doi:10.1007/s11284-015-1264-4
Fahrig L, Rytwinski T (2009) Effects of roads on animal abundance: an empirical review and synthesis. Ecol Soc 14:21
Farine DR, Aplin LM, Sheldon BC, Hoppitt W (2015) Interspecific social networks promote information transmission in wild songbirds. Proc R Soc B-Biol Sci 282:20142804. doi:10.1098/rspb.2014.2804
Francis CD, Barber JR (2013) A framework for understanding noise impacts on wildlife: an urgent conservation priority. Front Ecol Environ 11:305–313. doi:10.1890/120183
Fuller RA, Warren PH, Gaston KJ (2007) Daytime noise predicts nocturnal singing in urban robins. Biol Lett 3:368–370. doi:10.1098/rsbl.2007.0134
Garcia J, Koelling RA (1966) Relation of cue to consequence in avoidance learning. Psychon Sci 4:123–124. doi:10.3758/BF03342209
Glista DJ, DeVault TL, DeWoody JA (2009) A review of mitigation measures for reducing wildlife mortality on roadways. Landsc Urban Plan 91:1–7. doi:10.1016/j.landurbplan.2008.11.001
Greggor AL, Clayton NS, Phalan B, Thornton A (2014) Comparative cognition for conservationists. Trends Ecol Evol 29:489–495. doi:10.1016/j.tree.2014.06.004
Grilo C, Bissonette JA, Santos-Reis M (2008) Spatial-temporal patterns in Mediterranean carnivore road casualties: consequences for mitigation. Biol Conserv 142:301–313
Grosman PD, Jaeger JAG, Biron PM, Dussault C, Ouellet J (2009) Reducing moose-vehicle collisions through salt pool removal and displacement: an agent-based modeling approach. Ecol Soc 14:17
Halfwerk W, Holleman LJM, Lessells CM, Slabbekoorn H (2011) Negative impact of traffic noise on avian reproductive success. J Appl Ecol 48:210–219. doi:10.1111/j.1365-2664.2010.01914.x
Hammond LJ (1968) Retardation of fear acquisition by a previously inhibitory CS. J Comp Physiol Psychol 66:756–759. doi:10.1037/h0026546
Hare B, Plyusnina I, Ignacio N, Schepina O, Stepika A, Wrangham R, Trut L (2005) Social cognitive evolution in captive foxes is a correlated by-product of experimental domestication. Curr Biol 15:226–230. doi:10.1016/j.cub.2005.01.040
Harrison S, Prodohl PA, Elwood RW (2004) Behavioural trait assessment as a release criterion: boldness predicts early death in a reintroduction programme of captive-bred swift fox (Vulpes velox). Anim Conserv 7:313–320. doi:10.1017/S1367943004001490
Hinde RA, Fisher J (1951) Further observations on the opening of milk bottles by birds. Br Birds 44:393–396
Holderegger R, Di Giulio M (2010) The genetic effects of roads: a review of empirical evidence. Basic Appl Ecol 11:522–531. doi:10.1016/j.baae.2010.06.006
Holling CS (1978) Adaptive Environmental Management and Assessment. Wiley, Chichester
Hollis KL, Pharr VL, Dumas MJ, Britton GB, Field J (1997) Classical conditioning provides paternity advantage for territorial male blue gouramis (Trichogaster trichopterus). J Comp Psychol 111:219–225. doi:10.1037/0735-7036.111.3.219
Hume DK (1995) Anti-predator training: an experimental approach in reintroduction biology. Dissertation, University of Canterbury
Jachowski DS, Slotow R, Millspaugh JJ (2014) Good virtual fences make good neighbors: opportunities for conservation. Anim Conserv 17:187–196. doi:10.1111/acv.12082
James MS, Stockwell MP, Clulow J, Clulow S, Mahony MJ (2015) Investigating behaviour for conservation goals: conspecific call playback can be used to alter amphibian distributions within ponds. Biol Conserv 192:287–293. doi:10.1016/j.biocon.2015.10.001
Jochimsen DM, Peterson CR, Andrews KM, Gibbons WJ (2004) A literature review of the effects of roads on amphibians and reptiles and the measures used to minimize those effects. Idaho Fish and Game Department and USDA Forest Service report
Jones CE, Riha PD, Gore AC, Monfils M (2014) Social transmission of Pavlovian fear: fear-conditioning by-proxy in related female rats. Anim Cognit 17:827–834. doi:10.1007/s10071-013-0711-2
Kight CR, Saha MS, Swaddle JP (2012) Anthropogenic noise is associated with reductions in the productivity of breeding Eastern Bluebirds (Sialia sialis). Ecol Appl 22:1989–1996
Kilgo JC, Labisky RF, Fritzen DE (1998) Influences of hunting on the behavior of white-tailed deer: implications for conservation of the Florida panther. Conserv Biol 12:1359–1364. doi:10.1046/j.1523-1739.1998.97223.x
Kilpatrick HJ, LaBonte AM, Seymour JT (2002) A shotgun-archery deer hunt in a residential community: evaluation of hunt strategies and effectiveness. Wildl Soc Bull 30:478–486
Kloppers EL, St. Clair CC, Hurd TE (2005) Predator-resembling aversive conditioning for managing habituated wildlife. Ecol Soc 10:18–31
Kociolek AV, Clevenger AP, Clair CCS, Proppe DS (2011) Effects of road networks on bird populations. Conserv Biol 25:241–249. doi:10.1111/j.1523-1739.2010.01635.x
Krutzen M, Mann J, Heithaus MR, Connor RC, Bejder L, Sherwin WB (2005) Cultural transmission of tool use in bottlenose dolphins. Proc Natl Acad Sci 102:8939–8943. doi:10.1073/pnas.0500232102
Laland KN (2004) Social learning strategies. Learn Behav 32:4–14
Langen TA, Ogden KM, Schwarting LL (2009) predicting hot spots of herpetofauna road mortality along highway networks. J Wildl Manag 73:104–114. doi:10.2193/2008-017
Lee C, Prayaga K, Reed M, Henshall J (2007) Methods of training cattle to avoid a location using electrical cues. Appl Anim Behav Sci 108:229–238. doi:10.1016/j.applanim.2006.12.003
Lefebvre L (1995) The opening of milk bottles by birds: evidence for accelerating learning rates, but against the wave-of-advance model of cultural transmission. Behav Process 34:43–53. doi:10.1016/0376-6357(94)00051-H
Leigh J, Chamberlain MJ (2008) Effects of aversive conditioning on behavior of nuisance Louisiana black bears. Hum Wildl Confl 2:175–182
Magrath RD, Haff TM, McLachlan JR, Igic B (2015) Wild birds learn to eavesdrop on heterospecific alarm calls. Curr Biol 25:2047–2050. doi:10.1016/j.cub.2015.06.028
Maier SF, Seligman ME (1976) Learned helplessness: theory and evidence. J Exp Psychol Gen 105:3–46. doi:10.1037/0096-3445.105.1.3
Maier SF, Seligman ME, Solomon RL (1969) Pavlovian fear conditioning and learned helplessness effects on escape and avoidance behavior of (a) the CS-US contingency and (b) the independence of the US and voluntary responding. In: Campbell BA, Church RM (eds) Punishment and aversive behavior. Appleton, New York, pp 299–342
Maier SF, Tomie A, Jackson RL (1987) Potentiation, overshadowing, and prior exposure to inescapable shock. J Exp Psychol Anim Behav 13:260–270
Maren S (2001) Neurobiology of Pavlovian fear conditioning. Annu Rev Neurosci 24:897–931. doi:10.1146/annurev.neuro.24.1.897
Marler P (1970) A comparative approach to vocal learning: song development in white-crowned sparrows. J Comp Physiol Psychol 71:1–25. doi:10.1037/h0029144
Marler P, Tamura M (1964) Culturally transmitted patterns of vocal behavior in sparrows. Science 146:1483–1486
Mason RT, Parker MR (2010) Social behavior and pheromonal communication in reptiles. J Comp Physiol A Neuroethol Sens Neural Behav Physiol 196:729–749. doi:10.1007/s00359-010-0551-3
Mastro LL, Conover MR, Frey SN (2008) Deer-vehicle collision prevention techniques. Hum Wildl Confl 2:80–92
Mazur RL (2010) Does aversive conditioning reduce human-black bear conflict? J Wildl Manag 74:48–54. doi:10.2193/2008-163
McClure CJW, Ware HE, Carlisle J, Kaltenecker G, Barber JR (2013) An experimental investigation into the effects of traffic noise on distributions of birds: avoiding the phantom road. Proc Roy Soc B 280:20132290. doi:10.1098/rspb.2013.2290
McGregor P, Horn A, Leonard M, Thomsen F (2013) Anthropogenic noise and conservation. In: Brumm H (ed) Animal communication and noise. Springer, London, pp 409–444. doi:10.1007/978-3-642-41494-7_14
McLean IG, Duncan C, Jarman PJ, Wynne CDL, Schmitt NT (2000) Learning for life: training marsupials to recognise introduced predators. Behaviour 137:1361–1376. doi:10.1163/156853900501971
Meillere A, Brischoux F, Ribout C, Angelier F (2015) Traffic noise exposure affects telomere length in nestling house sparrows. Biol Lett 11:20150559. doi:10.1098/rsbl.2015.0559
Mennitt D, Fristrup KM, Sherrill K, Nelson L (2013) Mapping sound pressure levels on continental scales using a geospatial sound model. Proc Inter-Noise 1–11
Michaels CJ, Downie JR, Campbell-Palmer R (2014) The importance of enrichment for advancing amphibian welfare and conservation goals: a review of a neglected topic. Amphib Rept Conserv 8:e77
Miller GE, Chen E, Zhou ES (2007) If it goes up, must it come down? Chronic stress and the hypothalamic-pituitary-adrenocortical axis in humans. Psychol Bull 133:25–45. doi:10.1037/0033-2909.133.1.25
Munro KG, Bowman J, Fahrig L (2012) Effect of paved road density on abundance of white-tailed deer. Wildl Res 39:478–487. doi:10.1071/WR11152
Ng JW, Nielsen C, Clair CCS (2008) Landscape and traffic factors influencing deer-vehicle collisions in an urban environment. Human-Wildl Confl 2:34–47
Nijland HA, Van Kempen EEMM, Van Wee GP, Jabben J (2003) Costs and benefits of noise abatement measures. Transp Policy 10:131–140. doi:10.1016/S0967-070X(02)00064-1
Nogueira SSC, Abreu SA, Peregrino H, Nogueira-Filho SLG (2014) The effects of feeding unpredictability and classical conditioning on pre-release training of white-lipped peccary (Mammalia, Tayassuidae). PLoS One 9:e86080. doi:10.1371/journal.pone.0086080
Northrup JM, Pitt J, Muhly TB, Stenhouse GB, Musiani M, Boyce MS (2012) Vehicle traffic shapes grizzly bear behaviour on a multiple-use landscape. J Appl Ecol 49:1159–1167. doi:10.1111/j.1365-2664.2012.02180.x
Novaro AJ, Funes MC, Walker RS (2005) An empirical test of source-sink dynamics induced by hunting. J Appl Ecol 42:910–920. doi:10.1111/j.1365-2664.2005.01067.x
Pavlov IP (1927) Conditioned reflexes: an investigation of the physiological activity of the cerebral cortex. Oxford University Press, Milford
Pearce JM, Dickinson A (1975) Pavlovian counterconditioning: changing the suppressive properties of shock by association with food. J Exp Psychol Anim Behav 1:170–177
Price-Rees SJ, Webb JK, Shine R (2011) School for Skinks: can conditioned taste aversion enable bluetongue lizards (Tiliqua scincoides) to avoid toxic cane toads (Rhinella marina) as prey? Ethology 117:749–757. doi:10.1111/j.1439-0310.2011.01935.x
Price-Rees SJ, Webb JK, Shine R (2013) Reducing the impact of a toxic invader by inducing taste aversion in an imperilled native reptile predator. Anim Conserv 16:386–394. doi:10.1111/acv.12004
Quinn JL, Whittingham MJ, Butler SJ, Cresswell W (2006) Noise, predation risk compensation and vigilance in the chaffinch fringilla coelebs. J Avian Biol 37:601–608
Reijnen R, Foppen R (2006) Impact of road traffic on breeding bird populations. In: Davenport J, Davenport JL (eds) The ecology of transportation: managing mobility for the environment. Springer, Heidelberg, pp 255–274
Rendell L, Fogarty L, Hoppitt WJE, Morgan TJH, Webster MM, Laland KN (2011) Cognitive culture: theoretical and empirical insights into social learning strategies. Trends Cognit Sci (Regul Ed) 15:68–76. doi:10.1016/j.tics.2010.12.002
Rescorla RA (1969) Pavlovian conditioned inhibition. Psychol Bull 72:77–94. doi:10.1037/h0027760
Rossler ST, Gehring TM, Schultz RN, Rossler MT, Wydeven AP, Hawley JE (2012) Shock collars as a site-aversive conditioning tool for wolves. Wildl Soc Bull 36:176–184. doi:10.1002/wsb.93
Row JR, Blouin-Demers G, Weatherhead PJ (2007) Demographic effects of road mortality in black rat snakes (Elaphe obsolete). Biol Conserv 137:117–124
Samia DSM, Nakagawa S, Nomura F, Rangel TF, Blumstein DT (2015) Increased tolerance to humans among disturbed wildlife. Nat Commun 6:8877. doi:10.1038/ncomms9877
Schakner ZA, Lunsford C, Straley J, Eguchi T, Mesnick SL (2014) Using models of social transmission to examine the spread of longline depredation behavior among sperm whales in the Gulf of Alaska. PLoS One 9:e109079. doi:10.1371/journal.pone.0109079
Schiff R, Smith N, Prochaska J (1972) Extinction of avoidance in rats as a function of duration and number of blocked trials. J Comp Physiol Psychol 81:356–359. doi:10.1037/h0033540
Seligman MEP, Maier SF, Solomon RL (1971) Unpredictable and uncontrollable aversive events. In: Brush RF (ed) Aversive conditioning and learning. Academic Press Inc., New York, pp 347–400
Shepard DB, Kuhns AR, Dreslik MJ, Phillips CA (2008) Roads as barriers to animal movement in fragmented landscapes. Anim Conserv 11:288–296. doi:10.1111/j.1469-1795.2008.00183.x
Sherry DF, Galef BG (1984) Cultural transmission without imitation: milk bottle opening by birds. Anim Behav 32:937–938. doi:10.1016/S0003-3472(84)80185-2
Sih A (2013) Understanding variation in behavioural responses to human-induced rapid environmental change: a conceptual overview. Anim Behav 85:1077–1088. doi:10.1016/j.anbehav.2013.02.017
Slabbekoorn H, Peet M (2003) Birds sing at a higher pitch in urban noise—Great tits hit the high notes to ensure that their mating calls are heard above the city’s din. Nature 424:267
Somaweera R, Webb JK, Brown GP, Shine R (2011) Hatchling Australian freshwater crocodiles rapidly learn to avoid toxic invasive cane toads. Behaviour 148:501–517. doi:10.1163/000579511X565763
St Clair CC (2003) Comparative permeability of roads, rivers, and meadows to songbirds in Banff National Park. Conserv Biol 17:1151–1160
Stamps JA (2001) Habitat selection by dispersers: integrating proximate and ultimate approaches. In: Clobert E, Danchin C, Dhondt A, Nichols A (eds) Dispersal. Oxford University Press, New York, pp 230–242
Sturdy CB, Proppe DS (2015) Hearing is believing: birds learn fear. Learn Behav. doi:10.3758/s13420-015-0207-9
Sudharsan K, Riley SJ, Winterstein SR (2006) Relationship of autumn hunting season to the frequency of deer-vehicle collisions in Michigan. J Wildl Manag 70:1161–1164. doi:10.2193/0022-541X(2006)70[1161:ROAHST]2.0.CO;2
Swaddle JP, Francis CD, Barber JR, Cooper CB, Kyba CCM, Dominoni DM, Shannon G, Aschehoug E, Goodwin SE, Kawahara AY, Luther D, Spoelstra K, Voss M, Longcore T (2015) A framework to assess evolutionary responses to anthropogenic light and sound. Trends Ecol Evol 30:550–560. doi:10.1016/j.tree.2015.06.009
Swaisgood RR (2010) The conservation-welfare nexus in reintroduction programmes: a role for sensory ecology. Anim Welf 19:125–137
Templeton CN, Greene E, Davis K (2005) Allometry of alarm calls: black-capped chickadees encode information about predator size. Science 308:1934–1937. doi:10.1126/science.1108841
Urbanek RP, Fondow LEA, Zimorski SE, Wellington MA, Nipper MA (2010) Winter release and management of reintroduced migratory Whooping Cranes Grus americana. Bird Conserv Int 20:43–54. doi:10.1017/S0959270909990153
Walters C, Hilborn R (1978) Ecological optimization and adaptive management. Annu Rev Ecol Syst 9:157–188. doi:10.1146/annurev.es.09.110178.001105
Ward M, Schlossberg S (2004) Conspecific attraction and the conservation of territorial songbirds. Conserv Biol 18:519–525. doi:10.1111/j.1523-1739.2004.00494.x
Ward-Fear G, Pearson DJ, Brown GP, Rangers B, Shine R (2016) Ecological immunization: in situ training of free-ranging predatory lizards reduces their vulnerability to invasive toxic prey. Biol Lett 12:20150863. doi:10.1098/rsbl.2015.0863
Ware HE, McClure CJ, Carlisle JD, Barber JR (2015) A phantom road experiment reveals traffic noise is an invisible source of habitat degradation. Proc Natl Acad Sci USA 112:12105–12109. doi:10.1073/pnas.1504710112
Webb JK, Brown GP, Child T, Greenlees MJ, Phillips BL, Shine R (2008) A native dasyurid predator (common planigale, Planigale maculata) rapidly learns to avoid a toxic invader. Austral Ecol 33:821–829. doi:10.1111/j.1442-9993.2008.01847.x
Whiten A, Goodall J, McGrew WC, Nishida T, Reynolds V, Sugiyama Y, Tutin CE, Wrangham RW, Boesch C (1999) Cultures in chimpanzees. Nature 399:682–685. doi:10.1038/21415
Williams SC, DeNicola AJ, Ortega IM (2008) Behavioral responses of white-tailed deer subjected to lethal management. Can J Zool 86:1358–1366. doi:10.1139/Z08-126
Woodley SK (2010) Pheromonal communication in amphibians. J Comp Physiol A Neuroethol Sens Neural Behav Physiol 196:713–727. doi:10.1007/s00359-010-0540-6
Acknowledgments
Special thanks to T Bugnyar and D Blumstien for their helpful comments on the manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
This article is part of the Special Issue Animal cognition in a human-dominated world.
Rights and permissions
About this article

Cite this article
Proppe, D.S., McMillan, N., Congdon, J.V. et al. Mitigating road impacts on animals through learning principles. Anim Cogn 20, 19–31 (2017). https://doi.org/10.1007/s10071-016-0989-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10071-016-0989-y