
Abstract
Cognitive processes are important to animals because they not only influence how animals acquire, store and recall information, but also may underpin behaviours such as deciding where to look for food, build a nest, or with whom to mate. Several recent studies have begun to examine the potential interaction between variation in cognition and variation in personality traits. One hypothesis proposed that there is a speed–accuracy trade-off in cognition ability that aligns with a fast–slow behaviour type. Here, we explicitly examined this hypothesis by testing wild-caught black-capped chickadees in a series of cognitive tasks that assessed both learning speed (the number of trials taken to learn) and accuracy (post-acquisition performance when tested with un-trained exemplars). Chickadees’ exploration scores were measured in a novel environment task. We found that slow-exploring chickadees demonstrated higher accuracy during the test phase, but did not learn the initial task in fewer trials compared to fast-exploring chickadees, providing partial support for the proposed link between cognition and personality. We report positive correlations in learning speed between different phases within cognitive tasks, but not between the three cognitive tasks suggesting independence in underlying cognitive processing. We discuss different rule-based strategies that may contribute to differential performance accuracy in cognitive tasks and provide suggestions for future experimentation to examine mechanisms underlying the relationship between cognition and personality.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Recent research in the field of animal personality has focused on two distinct styles of coping with stress: reactive and proactive (Koolhaas et al. 1999, 2010; Cockrem 2007; Carere et al. 2010; Carere and Locurto 2011). Although these two styles are often characterized dichotomously in the literature, in nature, individual differences in behaviour and physiology fall along a continuum, and in practice, are usually measured as such. Animals characterized as falling towards the proactive end of the continuum (hereafter referred to simply as proactive) tend to be aggressive towards rivals, are fast and superficial explorers, and seek out novelty in their environment. In contrast, animals characterized as falling towards the reactive end of the continuum (hereafter referred to as reactive) are less aggressive, are slow and careful explorers, and prefer the familiar (Groothuis and Carere 2005; Cockrem 2007; for a review see Coppens et al. 2010). If different personality types are maintained within a population, the usual hypothesis is that one personality type excels in one situation, while a second personality type excels in another situation. The habitat-dependent selection hypothesis suggests that certain habitats may favour different behavioural types, for instance, slow versus fast explorers. Previous theoretical work (Cockrem 2007) hypothesized that fast-exploring birds may fare better in consistent environments because forming stable routines quickly is beneficial (Marchetti and Drent 2000). Slow-exploring birds may be more sensitive to environments that are constantly changing and thus benefit in dynamic environments. The results of several empirical studies using different songbird species as a model support Cockrem’s hypothesis and have led to increased interest and hypotheses about the way individuals differ in learning abilities, learning styles or learning strategies (van Oers and Naguib 2013) and how these differences in cognition interact with personality (Chittka et al. 2009; Sih and Del Giudice 2012; Niemelä et al. 2013).
For instance, black-capped chickadees (Poecile atricapillus) that are fast explorers in a novel environment also learn an acoustic discrimination task in fewer trials compared to slow explorers (Guillette et al. 2009). The cognitive task used by Guillette et al. (2009) was designed to favour individuals that formed routines quickly: there was only one rule to learn in the instrumental discrimination task and that rule was for birds to respond to exemplars that belong to one category (e.g. ‘B’ notes from the chick-a-dee call of the black-capped chickadee) and withhold responding to exemplars that belong to a second category (e.g. ‘C’ notes from the chick-a-dee call). In this task (Guillette et al. 2009), the proactive behavioural strategy (sensu Cockrem 2007) was advantageous because the environment was stable (i.e. only one rule). In a subsequent experiment, Guillette et al. (2011) utilized the same instrumental discrimination paradigm but manipulated the task to favour individuals with reactive strategies by making the environment less stable; this was accomplished by reversing the reward contingencies associated with responding to stimuli from different categories after the birds learned the initial reward contingencies of the task. As predicted, fast-exploring birds outperformed slow-exploring birds in the former experiment, while slow-exploring birds outperformed fast-exploring birds when the rules changed in the latter experiment (Guillette et al. 2009, 2011).
Similar results, in support of Cockrem’s (2007) characterization of proactive and reactive avian personalities, were observed in recent experiments conducted with great tits (Parus major), a European relative of the black-capped chickadee. Slow-exploring great tits outperformed fast-exploring great tits in an avoidance learning task (Exnerová et al. 2010). In another study using a dimension shift learning paradigm (colour-location; Titulaer et al. 2012), great tits’ exploratory behaviour was related to learning only in the most cognitively demanding stages, but effects were opposite for males and females. In the reversal stage, fast-exploring males took fewer trials to acquire the task compared to slow-exploring males, whereas slow-exploring females outperformed fast-exploring females. Titulaer et al.’s (2012) results obtained for females are in support of Cockrem’s classification of proactive and reactive personality types, but the results for males are not. Previous work examining the role of personality type in adult survival in wild great tits has demonstrated this same complex interaction; in years of high food availability, fast-exploring males and slow-exploring females had higher over winter survival, while the opposite was observed in years with low food availability (Dingemanse et al. 2004). However, another study conducted in a separate population of wild great tits showed that problem solving ability, a proxy for innovative foraging ability, did not co-vary with exploratory behaviour (Cole et al. 2011), while more recent research has shown correlations between problem solving ability and traits other than exploratory behaviour. For instance, individuals that were good problem solvers were poor competitors (Cole and Quinn 2012), and problem solving females had larger clutches but deserted their nests more so than non-problem-solving females (Cole et al. 2012). In sum, these studies suggest that there is a complex interaction between cognition, personality type and sex.
The studies outlined in the previous paragraphs demonstrate that instrumental conditioning, avoidance learning and dimensional shift learning paradigms are well suited to examine variation in cognitive performance among individuals and that differences in performance on cognitive tasks are related to differences in personality. In a recent review, Sih and Del Giudice (2012) suggest that there may be speed–accuracy trade-offs in cognition that align with fast–slow behavioural types (also see Carere and Locurto 2011 for a review of personality and cognition and Chittka et al. 2009 for a discussion on interindividual speed–accuracy trade-offs in decision making). Sih and Del Giudice postulate that factors that produce ‘fast behavioural types’ (akin to proactive personalities, Cockrem 2007) also produce ‘cognitive styles’ that highlight speed over accuracy. Until now, the studies conducted with chickadees (Guillette et al. 2009, 2011) and great tits (Exnerová et al. 2010; Titulaer et al. 2012; Amy et al. 2012) have only examined one aspect of learning, namely individual differences in learning rate.
The goal of the current study was to examine whether there are, in fact, speed–accuracy trade-offs that co-vary across personality and cognition, using the black-capped chickadee as a model species. Our predictions are, in accordance with Sih and Del Giudice’s hypothesis, that fast-exploring birds should learn a task in fewer trials compared to slow-exploring birds, but slow-exploring birds should outperform fast-exploring birds in a test designed to measure accuracy. To accomplish this, we first tested wild-caught black-capped chickadees in a novel environment task to assess their exploratory behaviour (Verbeek et al. 1994; Guillette et al. 2009, 2011; Titulaer et al. 2012). Exploratory behaviour is often used as a proxy for animal personality as it has been shown to be correlated, in great tits, with behaviours that affect fitness such as natal dispersal (Dingemanse et al. 2003), dominance (Dingemanse and de Goede 2004), nest defence (Hollander et al. 2008), mate-choice and extrapair behaviour (van Oers et al. 2008), and singing behaviour (Naguib et al. 2010); breeding studies have found exploratory behaviour to show substantial heritability (54 ± 5 %; Drent et al. 2003).
After assessing exploratory behaviour, birds in the current study were tested in three different cognitive tasks to assess not only learning speed as in previous studies (Guillette et al. 2009, 2011), but also performance accuracy. We trained birds in an acoustic instrumental discrimination task until they reached a specified level of expertise, and then, they were given a test to assess performance accuracy. In the current paper, we define learning speed (or learning rate) as the number of trials until animals reach criteria and accuracy as how animals perform when tested with exemplars they were not trained with.
Our previous studies showed that learning and reversal speed are related to exploration in an acoustic discrimination task (Guillette et al. 2009, 2011); we wanted to test whether this relationship holds when chickadees are tested on different cognitive tasks. Therefore, in the current experiment, we also tested our birds for both learning and reversal speed in a colour association task in which birds were trained to flip over chips to uncover food hidden in wells. The colour association task had training stages that mirrored those in the acoustic discrimination task and consisted of a pre-training phase to familiarize the birds to the apparatus and task, an initial learning phase where one colour was associated with a food reward and a second colour was not, and a reversal phase where the colour that was not rewarded during initial training was now rewarded. We also added a second learning phase that used new colours to signal both the food reward and absence of food reward. As with the acoustic discrimination task, we predicted that fast-exploring birds should learn the initial task in fewer trials compared to slow explorers and slow explorers should outperform fast explorers in the reversal (Cockrem 2007; Sih and Del Giudice 2012).
The third learning task we tested our birds in was a detour-reaching task to measure inhibitory control (Vlamings et al. 2010; Boogert et al. 2011). Inhibitory control is the ability to learn to inhibit an ineffective automatic response or to inhibit making a response to irrelevant stimuli. Birds were first presented with an opaque tube that was open at both ends. Once the birds learned how to retrieve a mealworm from inside the tube, we then gave the birds the same task, but with a transparent tube. Even after training with an opaque tube, birds initially respond to the transparent tube by directly reaching for the mealworm and making contact with the tube, thus failing to make the detour to the open end of the tube where they can obtain the mealworm. We measured the number of trials until the birds learned to inhibit this incorrect response and retrieve the mealworm. Our prediction is that slow-exploring birds will learn to inhibit this automatic response in fewer trials compared to fast-exploring birds. Lastly, our procedure allowed us to test whether there are stable individual differences in cognition because we tested learning performance across the three different learning tasks.
Methods
Subjects
Thirty birds in at least their second year determined by the shape and colouring of outer tail flight feathers (Pyle 1997) were captured between 22 December 2010 and 14 February 2011 using potter traps baited with sunflower seeds. Seventeen birds (10 male, 7 female) originated from the North Saskatchewan River Valley in Edmonton (NSRV), Alberta, Canada (53.53°, −113.52°), and thirteen birds (6 male, 7 female) originated from Stony Plain (SP), Alberta, Canada (53.45°, −114.013°), 36 km west of Edmonton. All birds were housed in the same colony room, which allowed for visual and vocal, but not physical, contact among birds. In winter flocks, black-capped chickadees establish dominance hierarchies through aggressive interactions (Smith 1991), so each bird was housed individually at the University of Alberta prior to and between all tests in Jupiter parakeet cages (30 × 40 × 40 cm; Rolf C. Hagen, Inc., Montreal, Quebec, Canada) or Blue Ribbon Pet Square Roof Bird Cage (46 × 46 × 56 cm; Wayfair LLC, Boston, Massachusetts, USA). The birds were given water for bathing and environmental enrichment (variety of wooden and plastic perches and cardboard ‘mouse house’ and plastic partition). Birds had free access to food, water (vitamin supplemented on alternating days), grit and cuttlebone. For additional supplements, birds were given a small number of sunflower seeds and one superworm three times a week, and a mixture of greens (spinach or parsley) and eggs twice a week. Birds were maintained on a light/dark cycle that mimicked the natural light cycle for Edmonton, Alberta, Canada. While in the colony room and during all testing, birds were visually monitored by animal care staff at least once per day.
Apparatus
Novel environment room
The novel environment room (2.03 × 1.52 × 2.0 m) housed five landing stations (artificial trees). Each tree was made of a 5 × 5 cm unfinished wooden ‘trunk’ that was 1.4 m high. There were four 1 cm diameter unfinished wooden dowel ‘branches’ that extended 20 cm from the trunk of the ‘tree’, two upper branches were 5 cm from the top of the tree, and the remaining two branches were 20 cm below and perpendicular to the top branches (Verbeek et al. 1994; Guillette et al. 2011). Each session was recorded with a JVC Everio camcorder fit with a wide angle lens and a Swann BulletCam, so behavioural data could be scored at a later date.
Instrumental discrimination chamber
Each bird was placed in a modified colony room cage (30 × 40 × 40 cm) that contained three perches, a grit cup, cuttlebone and water dispenser. An opening in one side of the cage (16 × 11 cm) allowed access to the motor-driven food hopper. The bottom of the cage was plastic mesh suspended above the chamber floor, so birds could not recover spilled or dropped food. Infrared beams spanned the entrance to the food hopper; a second set of infrared beams was situated on the request perch that was approximately 5 cm from the opening to the food hopper. These beams monitored the position of the bird. A Fostex FE108∑ speaker that broadcast stimuli was situated at perch height next to the food hopper, outside the cage. Each set-up was housed in a ventilated, sound-attenuating chamber lit by a 9-W full spectrum fluorescent bulb.
Stimulus preparation
The stimuli for the acoustic instrumental discrimination were the same stimuli used in Guillette et al. (2011; see Charrier et al. 2005 for detailed description of stimulus preparation). In brief, the stimuli were twenty exemplars each of B and C notes taken from high-quality recordings of chick-a-dee calls produced by black-capped chickadees. The average duration and loudest frequency of these notes types (mean ± SD) are as follows B: 52.3 ± 8.5 ms, 6,214.1 ± 647.3 Hz C: 56.7 ± 4.4 ms, 5,737 ± 1,009 (Charrier et al. 2004). Previous perceptual research has shown that black-capped chickadees classify each note type from their chick-a-dee call as belonging to a natural category when they are tested with novel exemplars (e.g. Sturdy et al. 2000; Charrier et al. 2005).
Colour association and detour-reaching chamber
Each bird was tested in their colony room cage (46 × 46 × 56 cm) placed inside a sound-attenuating chamber (Industrial Acoustics Co. Inc.; inner dimensions 58 × 168 × 83 cm). Birds remained in the chamber for the duration of testing. They had free access to water, grit and cuttle bone. They had free access to food with the exception of 90 min prior to and during the 3 h testing sessions each day. A camera, Sony Handycam—DCR-SX45/SC, was suspended above the cage, so each trial could be remotely viewed and recorded.
Colour associative apparatus
The Colour associative apparatus was a white plastic board (21.4 × 14.5 cm) with 24 wells (1.3 cm diameter × 1.3 cm deep) arranged in a 6 × 4 grid. Yellow, blue, red and green opaque plastic chips (1.8 cm diameter) with a foam stopper (0.5 cm deep) fitted into the well were used during training and shape 5 (see procedure, below). During stages 1–4 of shape training, the same plastic chips, without rubber stoppers, were used. See Fig. 1.

The foraging board apparatus used in the Colour Association task. a Shows the colours used in Discrimination 1 and Reversal phases, while b shows colours used in Discrimination 2. An overturned chip with foam stopper is also shown
Detour-reaching apparatus
The Detour-reaching apparatus was a plastic tube (2.5 cm length × 3.8 cm inner diameter) secured to a white plastic base (4.5 cm × 5 cm). The tube used during training was opaque black, and the tube used during testing was transparent. See Fig. 2.

The opaque (a) and transparent (b) tubes used in the Detour-reaching task
Tasks
Novel environment task
Birds were tested in the novel environment task for their exploratory behaviour before participating in the cognitive tasks. The same procedure for the novel environment was followed as in Guillette et al. (2011). Briefly, birds were allowed to visually habituate to the novel environment room for 1 h while being held in their home cage, which was separated from the novel environment room via a transparent barrier. After the habituation period, the barrier was removed and a 15-min trial commenced. All trials were conducted between 1000 and 1400 hours. All birds were run in the novel environment room between 02 January 2012 and 15 January 2012.
Instrumental discrimination task
Preliminary training
Preliminary training began once a bird had learned how to use the request perch and food hopper to obtain food. To start a trial in preliminary training, a bird had to break the infrared beam on the request perch for a random interval between 900 and 1,100 ms. Then, a note from the pool of 40 notes (20 B notes, 20 C notes) was randomly selected and played (~75 dB SPL) from the speaker. There was one exemplar per trial. Each of the 40 exemplars was played once, without replacement, until each exemplar had been played, and then, all exemplars were returned to the stimulus pool. If the bird left the request perch before the note had finished playing, the trial was terminated and a 30 s inter-trial interval (ITI) with the houselights off ensued. This trained birds to remain on the perch and attend to each stimulus, in its entirety, before making a response (flying to the feeder, or not flying to the feeder). If the bird remained on the perch for the entire duration of the stimulus presentation and then flew to the feeder, thus breaking the infrared beam in the feeder within 1 s of the stimulus completion, the food cup rose and the bird had access to food for 1 s followed by a 30 s ITI with the houselights on, before another trial could be initiated. If the bird remained on the request perch for the entire duration of the stimulus presentation and then flew away within 1 s of stimulus completion but did not enter the feeder, a new trial could be initiated after 1 s. If the bird remained on the request perch for the entire duration of the stimulus presentation and did not leave the request perch, a new trial would initiate after 60 s with the houselights on. If the bird left the request perch during the 60-s interval, a new trial could be initiated if the bird remained off the request perch for 1 s.
The goals of preliminary training were to: (1) train birds to remain on the request perch for the entire duration of each stimulus before making a response, (2) train birds to leave the request perch after each stimulus completion, (3) create high, uniform responses to each stimulus that the birds would hear during the remainder of the experiment and (4) alleviate any potential effects of neophobia on learning rate (all exemplars used in subsequent training and testing were heard an equal number of times during preliminary training). The criteria to complete preliminary training were greater than or equal to 60 % responding to all exemplars and no greater than 3 % difference in responding to future S+ and S− exemplars over the last 520 trials. Birds were then given 1 day of free feed and had to reach the criteria a second time in order to move to the next phase.
Initial discrimination training
Initial discrimination training began following completion of preliminary training. In this phase, all contingencies from preliminary training remained in place with the exception of differential food reinforcement for S+ and S− exemplars. Specifically, breaking the infrared beam in the food hopper after S+ exemplars resulted in 1 s access to food on 80 % of the trials, while visits to the feeder after S− exemplars resulted in a 30 s ITI with the houselights off. All 30 birds were trained with B notes as S+ and C notes as S−. Birds were trained to discriminate ten S+ from ten S− exemplars. The criterion to complete this phase was obtaining a discrimination ratio (DR; calculated by dividing the average per cent response to S+ exemplars by the average per cent response to all [both S+ and S−] exemplars, excluding terminated trials) of 0.8 or greater, over the last 500 trials.
After birds completed initial discrimination training, the probability of reinforcement for responding to S+ exemplars was lowered from 0.8 to 0.6. This resulted in 30 % of all trials (S+ and S− combined) being rewarded. This stage was to ready birds for the next phase, probe testing, where they would receive the same overall reinforcement rate (i.e. 30 %). Birds remained on discrimination training with 0.6 probability of being reinforced until they obtained a DR of 0.8 or greater for at least 500 trials.
Probe testing
During probe testing, the birds continued to hear the same 10 S+ and 10 S− exemplars from the initial discrimination phase, with a probability of reinforcement of 0.9 for responding to S+ exemplars. In addition to these 20 exemplars, five additional B notes and five additional C notes were played during Probe 1, and a different five B notes and a different five C notes during Probe 2. These ten additional B note exemplars and ten additional C note exemplars were not presented during initial discrimination training, but were all previously reinforced during preliminary training. However, during probe testing, these ten additional exemplars were not reinforced with food or punished with the houselights turning off. Birds were on each of the two probe phases for a minimum of 510 trials. The overall reinforcement rate during probe testing was 30 %, the same as in the latter part of initial discrimination training.
Reversal training
Once birds completed probe testing, they moved onto reversal training. In reversal training, there were three stages: Reversal 1, Reversal 2 and Reversal 3. During all reversal stages, the same ten B note exemplars and ten C note exemplars from initial discrimination were used and the reinforcement probability for correct responses to S+ stimuli was 0.8, the same as in initial discrimination training. The criterion to complete each successive reversal stage was obtaining a DR of 0.8 or greater for the last 500 trials. During Reversal 1, the reward contingencies from initial discrimination were reversed, so now C notes were S+ and B notes were S−. In Reversal 2, the reward contingencies were the same as in initial discrimination, and during Reversal 3, the reward contingencies were the same as in Reversal 1.
Birds lived and worked in the instrumental chamber for the duration of the instrumental discrimination task. Birds received two supplemental superworms per day, one in the morning and one in the evening, and were returned to the colony room when they had completed the experiment. All birds were run in the instrumental discrimination task between 10 January 2012 and 15 May 2012.
Colour association task
Associative board shape training
Food was removed 90 min prior to the start of training each day. Training ran each day from 12.00 to 15.00 h. Each bird received five trials a day, which could last up to 10 min, with 30 min in between each trial. During shape training, birds progressed through five stages (following Boogert et al. 2008, 2011). In Stage 1, a piece of superworm was placed in four wells. The location of baited wells was randomized for each trial. In Stage 2, four wells were baited, and each one had a lid of a different colour (yellow, blue, red and green) placed next to it. In Stage 3, four wells were baited, and each one had a lid of a different colour half covering it. In Stage 4, four wells were baited, and each one had a lid of a different colour completely covering it. In Stage 5, four wells were baited, and each one had a lid of a different colour, now fitted with a rubber stopper, fitted into it. To ‘pass’ a trial, the bird had to obtain three of the four mealworm pieces within the 10-min trial. The trial ended, and the board was removed before the 10 min were up if all fours pieces of worm had been consumed. The criterion to complete each stage was receiving a pass on three trials in a row. Trials were cumulative across successive days; birds were trained 7 days a week.
Colour association training
Once a bird passed all five shaping stages it moved onto colour training. During colour training, there were eight wells covered: four lids of one colour were placed over baited wells (S+) and four lids of a second colour were placed over empty wells (S−). Each location was assigned according to a predetermined random number table. There were three training stages: Discrimination 1, Reversal and Discrimination 2. In Discrimination 1, the S+ colour was yellow and the S− colour was blue (see panel a Fig. 1). During Reversal, the S+ colour was blue and the S− colour was yellow. In Discrimination 2, the S+ colour was red and the S− colour was green (see panel b Fig. 1). If a bird flipped over all S+ lids before flipping over any S− lids within the 10-min trial, the trial was considered a ‘pass’. If the bird flipped over any S− lids before it flipped over all S+ lids, the trial was considered a ‘fail’. To pass each stage, a bird had to receive a pass on five out of six consecutive trials. If the bird flipped over one, two or three S+ lids and no S− lids and the trial timed out, the trial did not count against the consecutive window of six trials. All birds were run in the colour association task between 20 April 2012 and 06 July 2012.
Detour-reaching task
Opaque training
Food was removed 90 min prior to the start of training each day. Training ran each day from 1200 to 1520 hours. Each bird received ten trials a day, which could last up to 5 min, with 15 min in between each trial. One small piece of a mealworm was placed in the centre of the opaque tube (see panel a Fig. 2). The opaque tube was placed on the floor in the centre of the cage. A trial was considered a ‘pass’ if the bird retrieved the worm within the 5-min trial without pecking any part of the tube or base. A trial was considered a ‘fail’ if the bird pecked any part of the tube or base, or did not consume the mealworm. Regardless of whether a trial was a pass or fail, the tube was removed after the worm was consumed, or whether the 5-min trial elapsed and the worm was not consumed. A bird had to receive a pass on five out of six consecutive trials to reach criterion. Trials were cumulative across successive days; birds were trained 7 days a week.
Transparent training
Transparent training and criterion to pass transparent training were the same as in opaque training, except a transparent tube was used (see panel b Fig. 2). All birds were run in the Detour-reaching task between 11 July 2012 and 12 August 2012.
Scoring
The number of trees, out of five possible, visited by each bird in the novel environment room during the 15-min trial was scored from the video recording and served as the exploration score (Guillette et al. 2009, 2011). A score of zero indicated that the bird failed to leave its home cage during the trial. For the three learning tasks: Instrumental discrimination, Colour association and Detour reaching, the learning score for learning speed was the number of trials to reach criterion for the various stages of training. The learning score that measured performance accuracy was the discrimination ratio (DR) for the probe stimuli during Probe testing in the instrumental discrimination task. Discrimination performance is at chance when the DR is 0.5 and is perfect (responding to only S+ exemplars) when the DR is 1. Birds were ranked according to their raw learning speed scores so that learning speed could be compared across the different learning tasks. Reversal speed scores for the Instrumental discrimination task and the Colour association training were calculated by subtracting the initial learning score from the reversal learning score. Therefore, the longer (more trials) it took a bird to learn the reversal task, compared with the initial task, the higher the reversal speed score, reflecting that the bird was slow at reversing relative to a bird with a lower score.
Statistical analysis
Linear regressions to predict the exploration score from the learning scores included sex and tarsus length as independent variables. We controlled for these two permanent between-individual sources of variation because males and females may differ in predictability in some behavioural measures (Nakagawa et al. 2007; Schuett and Dall 2009; Guillette et al. 2010a), and body size is related to boldness scores in some species (Reale et al. 2007). Pearson correlations were conducted on the different raw learning scores within each learning task, and Spearman correlations were conducted on the ranked learning scores between the different learning tasks. All statistical tests were performed in IBM SPSS Statistics v19.
Ethical and welfare considerations
Traps were continuously monitored, and individual birds were removed immediately upon capture and placed into a cardboard transportation box (10 × 10 × 15 cm) filled with shredded newspaper. Trapping started at dawn and ceased for the day 1 h after the first individual was captured. As birds have not been feeding overnight, they readily enter the traps, which contain sunflower seeds. Using traps may result in a sampling bias, such that the ‘shyest’ individual in a population avoids the traps and is not captured (Biro and Dingemanse 2010; Guillette et al. 2010a). However, alternative trapping methods such as mist netting are not feasible in our area because of the extremely low ambient temperature. Transportation time to the laboratory from the capture site was <5 min from the NSRV and <60 min from SP. Upon arrival at the laboratory, each bird was fitted with a leg ring and weighed. All birds survived the transport and were quarantined for 3 weeks prior to any testing. Our permits allow us to trap up to 25 individuals per location per year, and Breeding Bird Surveys from 1985 to 2007 show no change in the abundance of black-capped chickadees in Alberta; their conservation status is listed as secure (Federation of Alberta Naturalists 2007). During quarantine, birds were given ad libitum water with vitamin supplements (Hagen, Inc., Montreal, Quebec, Canada) and received hulled and whole sunflowers mixed with ground bird food (Mazuri Small Bird Maintenance Diet; Mazuri, St Louis, Missouri, USA), grit and cuttlebone and 3–5 superworms (Zophobas morio) per day.
Two birds tested in the Novel environment died before completing the Instrumental discrimination task resulting in an N = 28. These two birds had food and water available, and post-mortem examination by University veterinarian revealed no obvious cause of death. One bird died in the colony room of unknown cause (post-mortem conducted by University veterinarian) between the Instrumental conditioning task and the Colour association task, and three birds were omitted from this task because they stopped flipping over lids during the task resulting N = 24. One bird developed an infection on its leg and was removed from testing and euthanized in accordance with the animal use protocol resulting in N = 26 for the Detour-reaching task.
When all testing was complete, birds were returned to the colony room for future use in other behavioural tests. In line with our animal use protocols, birds were not released into the wild. All animal studies were conducted in accordance with the Canadian Council on Animal Care Guidelines and Policies with approval from the Animal Care and Use Committee for Biosciences for the University of Alberta (AUP 108). Chickadees were captured, and research was carried out under an Environment Canada Canadian Wildlife Service Scientific permit (#09-MB-SC0), Alberta Fish and Wildlife Capture and Research permits (CN54040), and City of Edmonton Parks Permit.
Results
See Fig. 3 for a histogram of the number of birds that visited 0 (failed to leave home cage) to all 5 trees in the Novel environment task. The number of trials to criterion is reported for each individual in Fig. 4, broken down by phase within the learning task. The number of trials to complete the Instrumental learning task ranged from 598 to 2,944 (1,160 ± 539, Panel a Fig. 4). The cumulative number of trials to reach criterion for the Colour association task ranged from 30 to 64 (43 ± 8, Panel b Fig. 4). The cumulative number of trials to reach criterion for the Detour-reaching task (N = 26) ranged from 14 to 63 (28 ± 12, Panel c Fig. 4).

The number of birds (y-axis) that visited 0–5 trees (x-axis) in the Novel environment task. A bird received a score of zero if it failed to leave its home cage during the 15-min trial. Grey portion of bars represents individuals captured at Stony Plain (SP) N = 13, and black portions of bars represent birds captured in the North Saskatchewan River Valley (NSRV), N = 17

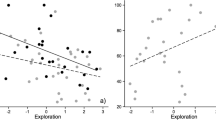
The number of trials to criterion (y-axis) for each individual arranged by the number of trees visited in the novel environment (x-axis) for each learning task. a Represents the Instrumental discrimination task (N = 28) where the reward contingencies for initial disc (initial discrimination) and Reversal 2 were B+C−. The reward contingencies for Reversal 1 and Reversal 3 were B–C+. b Represents the Colour association task (N = 24) where Disc 1 (Discrimination 1) was Yellow S+/Blue S−, Reversal was Yellow S−/Blue S+, and Disc 2 (Discrimination 2) was Red S+/Green S−. c Represents the Detour-reaching task (N = 26), where Opaque was training with the opaque tube and transparent was training with the transparent tube
Relationship between learning speed and exploration
Across all learning tasks learning speed did not significantly predict exploratory behaviour; please see Table 1 for N, R 2adj , F, and P values.
Relationship between performance accuracy and exploration
Performance accuracy significantly predicted exploratory behaviour, R 2adj = 0.18, F 3,25 = 3.02, P = 0.048. The DR for probe exemplars was the only variable that significantly contributed to this equation, β = −0.44, P = 0.017. Tarsus length (β = 0.16, P = 0.37) and sex (β = −0.16, P = 0.35) did not contribute significantly. A separate analysis showed that there was no interaction between sex and exploratory behaviour in predicting DR. Birds that visited fewer trees in the novel environment had higher DRs (Fig. 5). The DR for the training exemplars during the probe testing was not significantly related to exploratory behaviour, R 2adj = 0.07, F 3,25 = 1.72, P = 0.19.

The number of novel trees visited in the novel environment task (x-axis) and the discrimination ratio (DR) during probe testing in the Instrumental discrimination task (y-axis). The dashed line represents the DR that each bird was required to reach (0.80 or greater) for the 500 trials prior to probe testing
Correlations within learning tasks
The number of trials to reach criterion in the Colour association task for Discrimination 1 and Discrimination 2 was significantly correlated, r = 0.40, N = 24, P = 0.05. The number of trials to reach criterion for each phase in the Instrumental discrimination task was all significantly positively correlated (all r’s > 0.6, N = 28, all P values ≤0.001). It should be noted that although there were multiple comparisons performed to examine whether the number of trials taken to learn different stages both within and between the three learning tasks, the significant r values for the number of trials to reach criterion for each phase in the Instrumental discrimination task are robust in that they are still significant after the Bonferrion test for multiple comparisons is applied. See Table 2 for specific r and P values between the different phases within each learning task.
Correlations across learning tasks
The rank order of trials to reach criterion was not significantly correlated across any of the learning tasks for original learning (initial acquisition in both the Instrumental discrimination task and Discrimination 1 in Colour associative task, r s = 0.027, N = 27, P = 0.89) or reversal learning (Reversal 1 in both the Instrumental discrimination task and the Colour associative task, r s = −0.16, N = 26, P = 0.45). See Table 2 for specific r s and P values for correlations between learning tasks.
Discussion
We tested the hypothesis that variation in cognition is related to variation in personality. Each bird’s exploration score was first measured in a novel environment task. Next, across a series of cognitive tasks, we measured both learning speed and performance accuracy. We found that performance accuracy co-varied with exploratory behaviour, but learning speed did not. A secondary aim of the experiment was to test whether there are stable individual differences in learning speed both within and between cognitive tasks. We found evidence of stable individual differences in learning with positive correlations between learning and reversal speed within two of the three cognitive tasks. However, we did not find evidence of stable individual differences across the three cognitive tasks.
Our results demonstrate that slow-exploring chickadees have higher performance in a learning task compared to fast-exploring conspecifics, which supports a recent hypothesis proposed by Sih and Del Giudice (2012). This hypothesis states that animals with fast behavioural types (e.g. fast explorers) will also have cognitive styles that emphasize speed over accuracy. In our learning task, we trained each chickadee, in a go/no-go instrumental discrimination task, to classify note types from their name-sake chick-a-dee call. Previous research from our laboratory has shown that chickadees perceive different note types from this call as belonging to discrete, open-ended categories (Sturdy et al. 2000, 2007; Charrier et al. 2005; Guillette et al. 2010b). In the current experiment, chickadees were trained to respond (go) to the feeder when they heard a B note played, and withhold responding (no go) when they heard a C note played. Once each bird was performing above criterion, our measure of performance accuracy was how well the bird was able to classify new exemplars of B and C notes. We found that slow-exploring birds outperformed fast-exploring birds when asked to classify these new exemplars but there was no difference in accuracy between fast and slow explorers in classifying previously trained exemplars. An alternative, but not mutually exclusive, interpretation of the chickadees’ performance when tested with novel exemplars of the different note types is that slow-exploring chickadees may tend to generalize a previously learned rule more readily than fast-exploring birds and thus continue to correctly classify a novel B note as belonging to the B note category, and a novel C note as belonging to the C note category. On the other hand, fast-exploring birds may be more expert discriminators in the sense that what we are calling their performance accuracy (specifically their discrimination ratio) may have been lower compared to slow explorers because the fast explorers may learn more about the absolute properties of the stimuli in training and thus fail to classify new exemplars ‘correctly’ while slow explorers learn more about the general rules.
This interpretation fits with Cockrem’s (2007) classification of avian personalities in that proactive individuals (i.e. fast explorers) may fare better in environments that are constant or predictable compared to reactive individuals that fare better in changing or unpredictable conditions. Namely, proactive individuals are those that learn absolute rules, or about absolute properties of stimuli, while reactive individuals may learn more general rules, or about general properties of stimuli. An intradimensional discrimination task (e.g. wavelength of light, Hanson 1959; line orientation, Honig et al. 1963; Bloomfield 1967; Honig and Urcuioli 1981) may be well suited to address this hypothesis. Animals that produce steeper generalization gradients discriminate between intradimensional test stimuli more than animals that produce shallower gradients, and therefore, we may expect fast-exploring individuals, if they do learn more about the absolute properties of stimuli, to have steeper generalization gradients compared to slow-exploring conspecifics.
In the current study, we found no relationship between learning speed and exploration type. Previously, using similar stimuli and procedures, we found that faster learners were faster explorers in one cohort of chickadees (Guillette et al. 2009) but not a second cohort (Guillette et al. 2011). Furthermore, in Guillette et al. (2011), slow explorers outperformed fast explorers on a reversal learning task, but we found no relationship between reversal speed and exploration in the current experiment (reversal speed was not tested in Guillette et al. 2009). Across these three studies, what remains constant is that some aspect of cognition (i.e. learning speed, reversal speed or performance accuracy) is related to exploration. This result is consistent with other studies that examine the relationship between cognition and learning and found complex, interactions depending on factors such as sex of the individual or difficulty of the learning task (Titulaer et al. 2012). The chickadees tested in these three studies originated from different locations and were captured in different years. Several studies on wild-caught animals demonstrate that the co-variance of personality traits is dependent on environmental conditions that may fluctuate from season to season (e.g. food availability, Dingemanse et al. 2004) or from one sampling location to another (e.g. predation pressure in different streams; see Bell et al. 2013 for a review) resulting in a pace-of-life syndrome, whereby populations that experience different ecologies have different suites of correlated traits (Reale et al. 2010).
Although there is a growing interest in the interaction between cognition and personality traits, as well as evidence from several species to support the idea that there is such an interaction (e.g. zebra finches, Taeniopygia guttata, Brust et al. 2013; great tits, Amy et al. 2012; Titulaer et al. 2012; Exnerová et al. 2010; European starlings, Sturnus vulgaris, Boogert et al. 2006; rainbow trout, Oncorhynchus mykiss, Sneddon 2003; Guppies, Poecilia reticulate, Dugatkin and Alfieri 2003; Budaev and Zhuikov 1998; black-capped chickadees, Guillette et al. 2009, 2011; Cavies, Cavia aperea, Guenther et al. 2014), less attention has been paid to individual consistency in cognition across time or contexts (Thornton and Lukas 2012; but see Matzel et al. 2003; Galsworthy et al. 2005 for studies on general intelligence in mice). In our studies, we found no correlations in learning speed between the three learning tasks. Evidence from recent studies that measured performance on multiple cognitive tasks shows that in some species, there are correlations among some cognitive traits but not others (e.g. feral pigeons, Bouchard et al. 2007; zebra finches, Boogert et al. 2008; woodpecker finch, Camarhynchus pallida, from Tebbich et al. 2011 [reported in Boogert et al. 2011]; song sparrows, Melospiza melodia, Boogert et al. 2011), but in other species no correlation among cognitive traits was detected [e.g. Zenaida doves, Zenaida aurita, Boogert et al. 2010; small tree finch, Camarhynchus parvulus, and medium ground finch, Geospiza fortis, Tebbich et al. 2010 (reported in Boogert et al. 2011) satin bowerbirds, Ptilonorhynchus violaceus, Keagy et al. 2011]. Lack of correlations across different cognitive tasks perhaps speaks to a more modular view of cognition where abilities have been shaped to be specialized through different ecological demands.
In sum, we find evidence in the current study that there is a relationship between cognition and exploration in black-capped chickadees: slow explorers are more accurate when tested with untrained exemplars compared to fast explorers. In two previous studies, we have also found evidence that cognition and exploration are related and furthermore that the direction of the relationships in all three studies is predicted by the proactive/reactive personality axis proposed by Cockrem (2007). If slow explorers are more accurate as indicated by the current data, what are the mechanisms driving this? It may be that slow explorers learn and use general rules while fast explorers learn and use more absolute rules. Even so, it is unclear why and how learning a general versus an absolute rule is related to how animals explore a novel environment. For example, what depth and sort of information is being processed by the animals and are later differences in information use obtained in exploring a novel environment due to difference in (1) amount of information encountered, (2) amount of information gathered/processed or (3) amount of information lost (forgotten)? While many studies, outlined above, with great tits have shown that exploration is indeed a proxy for personality and also predicts many other ecologically important variables, to uncover whether intrinsic differences in cognition exist among individuals, we need to understand the extent to which cognition and exploration co-vary, and what mechanisms may be driving these effects.
References
Amy M, van Oers K, Naguib M (2012) Worms under cover: relationships between performance in learning tasks and personality in great tits (Parus major). Anim Cogn 5:763–770. doi:10.1007/s10071-012-0500-3
Bell AM, Foster SA, Wund M (2013) Evolutionary perspectives on personality in stickleback fish. In: Carere C, Maestripieri D (eds) Animal personalities: behavior physiology and evolution. The University of Chicago Press, Chicago, pp 36–65
Biro PA, Dingemanse NJ (2010) Sampling bias resulting from animal personality. Trends Ecol Evol 24:66–67. doi:10.1016/j.tree.2008.10.004
Bloomfield TM (1967) A peak shift on a line tilt continuum. J Exp Anal Behav 4:361–366
Boogert NJ, Reader S, Laland KN (2006) The relation between social rank, neophobia and individual learning in starlings. Anim Behav 1229–1239. doi:10.1016/j.anbehav.2006.02.021
Boogert NJ, Giraldeau L-A, Lefebvre L (2008) Song complexity correlates with learning ability in zebra finch males. Anim Behav 76:1735–1741. doi:10.1016/j.anbehav.2008.08.009
Boogert NJ, Anderson RC, Peters S et al (2011) Song repertoire size in male song sparrows correlates with detour reaching, but not with other cognitive measures. Anim Behav 81:1209–1216. doi:10.1016/j.anbehav.2011.03.004
Bouchard J, Goodyer W, Lefebvre L (2007) Social learning and innovation are positively correlated in pigeons (Columba livia). Anim Cogn 10:259–266. doi:10.1007/s10071-006-0064-1
Brust V, Wuerz Y, Krüger O (2013) Behavioural flexibility and personality in zebra finches. Ethology 119. doi:10.1111/eth.12095
Budaev SV, Zhuikov AY (1998) Avoidance learning and “personality” in the guppy (Poecilia reticulata). J Comp Psychol 112:92–94
Carere C, Locurto C (2011) Interaction between animal personality and animal cognition. Curr Zool 57:491–498
Carere C, Caramaschi D, Fawcett TW (2010) Covariation between personalities and individual differences in coping with stress: converging evidence and hypotheses. Curr Zool 56:728–740
Charrier I, Bloomfield LL, Sturdy CB (2004) Note types and coding in parid vocalizations. I: the chick-a-dee call of the black-capped chickadee (Poecile atricapillus). Can J Zool 779:769–779. doi:10.1139/Z04-045
Charrier I, Lee TT, Bloomfield LL, Sturdy CB (2005) Acoustic mechanisms of note-type perception in black-capped chickadee (Poecile atricapillus) calls. J Comp Psychol 119:371–380. doi:10.1037/0735-7036.119.4.371
Chittka L, Skorupski P, Raine NE (2009) Speed-accuracy tradeoffs in animal decision making. Trends Ecol Evol 24:400–407. doi:10.1016/j.tree.2009.02.010
Cockrem JF (2007) Stress, corticosterone responses and avian personalities. J für Ornithol 148:169–178. doi:10.1007/s10336-007-0175-8
Cole EF, Quinn JL (2012) Personality and problem-solving performance explain competitive ability in the wild. Proc Biol Sci 279:1168–1175. doi:10.1098/rspb.2011.1539
Cole EF, Cram DL, Quinn JL (2011) Individual variation in spontaneous problem-solving performance among wild great tits. Anim Behav 81:491–498. doi:10.1016/j.anbehav.2010.11.025
Cole EF, Morand-Ferron J, Hinks AE, Quinn JL (2012) Cognitive ability influences reproductive life history variation in the wild. Curr Biol 22:1808–1812. doi:10.1016/j.cub.2012.07.051
Coppens CM, de Boer SF, Koolhaas JM (2010) Coping styles and behavioural flexibility: towards underlying mechanisms. Philos Trans R Soc B Biol Sci 365:4021–4028. doi:10.1098/rstb.2010.0217
Dingemanse NJ, de Goede P (2004) The relation between dominance and exploratory behavior is context-dependent in wild great tits. Behav Ecol 15:1023–1030. doi:10.1093/beheco/arh115
Dingemanse NJ, Both C, van Noordwijk AJ et al (2003) Natal dispersal and personalities in great tits (Parus major). Proc R Soc B Biol Sci 270:741–747. doi:10.1098/rspb.2002.2300
Dingemanse NJ, Both C, Drent PJ, Tinbergen JM (2004) Fitness consequences of avian personalities in a fluctuating environment. Proc R Soc B Biol Sci 271:847–852. doi:10.1098/rspb.2004.2680
Drent PJ, van Oers K, Van Noordwijk AJ (2003) Realized heritability of personalities in the great tit (Parus major). Proc R Soc B Biol Sci 270:45–51. doi:10.1098/rspb.2002.2168
Dugatkin LA, Alfieri MS (2003) Boldness, behavioral inhibition and learning. Ethol Ecol Evol 15:43–49
Exnerová A, Svádová KH, Fucíková E et al (2010) Personality matters: individual variation in reactions of naive bird predators to aposematic prey. Proc R Soc B Biol Sci 723–728. doi:10.1098/rspb.2009.1673
Federation of Alberta Naturalists (2007) Black-capped chickadee (Poecile atricapillus). Atlas breed. Birds Alberta a second look. Federation of Alberta Naturalists, Altona, pp 387–391
Galsworthy MJ, Paya-Cano JL, Liu L et al (2005) Assessing reliability, heritability and general cognitive ability in a battery of cognitive tasks for laboratory mice. Behav Genet 35:675–692. doi:10.1007/s10519-005-3423-9
Groothuis TGG, Carere C (2005) Avian personalities: characterization and epigenesis. Biobehav Rev 29:137–150. doi:10.1016/j.neubiorev.2004.06.010
Guenther A, Brust V, Dersen M, Trillmich F (2014) Learning and personality types are related in cavies (Cavia aperea). J Comp Psychol 128:74–81. doi:10.1037/a0033678
Guillette LM, Reddon AR, Hurd PL, Sturdy CB (2009) Exploration of a novel space is associated with individual differences in learning speed in black-capped chickadees, Poecile atricapillus. Behav Process 82:265–270. doi:10.1016/j.beproc.2009.07.005
Guillette LM, Bailey AA, Reddon AR (2010a) A brief report: capture order is repeatable in chickadees. Int J Comp Psychol 9:216–224
Guillette LM, Farrell TM, Hoeschele M et al (2010b) Mechanisms of call note-type perception in black-capped chickadees (Poecile atricapillus): peak shift in a note-type continuum. J Comp Psychol 124:109–115. doi:10.1037/a0017741
Guillette LM, Reddon AR, Hoeschele M, Sturdy CB (2011) Sometimes slower is better: slow-exploring birds are more sensitive to changes in a vocal discrimination task. Proc R Soc B Biol Sci 278:767–773. doi:10.1098/rspb.2010.1669
Hanson HM (1959) Effects of discrimination training on stimulus generalization. J Exp Psychol 58:321–334
Hollander FA, Van Overveld T, Tokka I, Matthysen E (2008) Personality and nest defence in the great tit (Parus major). Ethology 114:405–412. doi:10.1111/j.1439-0310.2008.01488.x
Honig WK, Urcuioli PJ (1981) The legacy of Guttman and Kalish: 25 years of reearch on stimulus generalization. J Exp Anal Behav 3:405–445
Honig WK, Boneau CA, Burstein KR, Pennypacker HS (1963) Positive and negative generalization gradients obtained after equivalent training conditions. J Comp Physiol Psychol 56:111–116. doi:10.1037/h0048683
Keagy J, Savard J-F, Borgia G (2011) Complex relationship between multiple measures of cognitive ability and male mating success in satin bowerbirds, Ptilonorhynchus violaceus. Anim Behav 81:1063–1070. doi:10.1016/j.anbehav.2011.02.018
Koolhaas JM, Korte SM, De Boer SF et al (1999) Coping styles in animals: current status in behavior and stress-physiology. Neurosci Biobehav Rev 23:925–935
Koolhaas JM, de Boer SF, Coppens CM, Buwalda B (2010) Neuroendocrinology of coping styles: towards understanding the biology of individual variation. Front Neuroendocrinol 31:307–321. doi:10.1016/j.yfrne.2010.04.001
Marchetti C, Drent PJ (2000) Individual differences in the use of social information in foraging by captive great tits. Anim Behav 131–140. doi:10.1006/anbe.2000.1443
Matzel LD, Han YR, Grossman H et al (2003) Individual differences in the expression of a “general” learning ability in mice. J Neurosci 23:6423–6433
Naguib M, Kazek A, Schaper SV et al (2010) Singing activity reveals personality traits in great tits. Ethology 116:763–769. doi:10.1111/j.1439-0310.2010.01791.x
Nakagawa S, Gillespie DOS, Hatchwell BJ, Burke T (2007) Predictable males and unpredictable females: sex difference in repeatability of parental care in a wild bird population. J Evol Biol 20:1674–1681. doi:10.1111/j.1420-9101.2007.01403.x
Niemelä PT, Vainikka A, Forsman JT et al (2013) How does variation in the environment and individual cognition explain the existence of consistent behavioral differences? Ecol Evol 3:457–464. doi:10.1002/ece3.451
Pyle P (1997) Identification guide to North American birds. Part 1. Slate Creek Press, Bolinas
Reale D, Reader S, Sol D et al (2007) Integrating animal temperament within ecology and evolution. Biol Rev 82:291–318. doi:10.1111/j.1469-185X.2007.00010.x
Reale D, Dingemanse NJ, Kazem AJ, Wright J (2010) Evolutionary and ecological approaches to the study of personality. Philos Trans R Soc B Biol Sci 365:3937–3946. doi:10.1098/rstb.2010.0222
Schuett W, Dall SRX (2009) Sex differences, social context and personality in zebra finches, Taeniopygia guttata. Anim Behav 77:1041–1050. doi:10.1016/j.anbehav.2008.12.024
Sih A, Del Giudice M (2012) Linking behavioural syndromes and cognition: a behavioural ecology perspective. Philos Trans R Soc B Biol Sci 367:2762–2772. doi:10.1098/rstb.2012.0216
Smith SM (1991) The black-capped chickadee: behavioral ecology and natural history. Comstock/Cornell University Press, Ithica
Sneddon LU (2003) The bold and the shy: individual differences in rainbow trout. J Fish Biol 44:971–975. doi:10.1046/j.1095-8649.2003.00084.x
Sturdy CB, Phillmore LS, Weisman RG (2000) Call-note discriminations in black-capped chickadees (Poecile atricapillus). J Comp Psychol 114:357–364
Sturdy CB, Bloomfield LL, Farrell TM et al (2007) Auditory category perception as a natural cognitive activity in songbirds. Comp Cogn Behav Rev 2:93–110
Tebbich S, Stankewitz S, Teschke I (2011) The relationship between foraging, learning abilities and neophobia in two species of Darwin’s finches. Ethology 135–146. doi:10.1111/j.1439-0310.2011.02001.x
Thornton A, Lukas D (2012) Individual variation in cognitive performance: developmental and evolutionary perspectives. Philos Trans R Soc B Biol Sci 367:2773–2783. doi:10.1098/rstb.2012.0214
Titulaer M, van Oers K, Naguib M (2012) Personality affects learning performance in difficult tasks in a sex-dependent way. Anim Behav 83:723–730. doi:10.1016/j.anbehav.2011.12.020
Van Oers K, Naguib M (2013) Avian personality. In: Carere C, Maestripieri D (eds) Animal personal behavior physiology evolution. The University of Chicago Press, Chicago, pp 66–95
Van Oers K, Drent PJ, Dingemanse NJ, Kempenaers B (2008) Personality is associated with extrapair paternity in great tits, Parus major. Anim Behav 555–563. doi:10.1016/j.anbehav.2008.03.011
Verbeek MEM, Drent PJ, Wiepkema PR (1994) Consistent individual differences in early exploratory behaviour in male great tits. Anim Behav 48:1113–1121
Vlamings PHJM, Hare B, Call J (2010) Reaching around barriers: the performance of the great apes and 3–5-year-old children. Anim Cogn 13:273–285. doi:10.1007/s10071-009-0265-5
Acknowledgments
This work was supported by a Natural Sciences and Engineering Research Council of Canada (NSERC) Discovery Grant (RGPIN 249887) and Discovery Accelerator Supplement (RGPAS 412311), Canada Foundation for Innovation (CFI) New Opportunities Fund and Infrastructure Operating Fund grants, an Alberta Ingenuity New Faculty Grant, and CFI partner funding and start-up funding from the University of Alberta. LMG was supported by an Izaak Walton Killam Memorial Scholarship (IWKMS) at the University of Alberta and is currently a Newton International Fellow supported by the Royal Society and the British Academy. MH was supported by an NSERC PostGraduate Scholarship, an Alberta Ingenuity Graduate Student Scholarship and an IWKMS and is currently funded by a European Research Council advanced Grant [No. 230604 ‘SOMACCA’] awarded to W. Tecumseh Fitch at the University of Vienna. AHH is supported by the Department of Psychology at the University of Alberta. We thank our research assistant John Hoang for aid in running instrumental training, and our technical assistants, Lou Omerzu and Isaac Lank. Thanks to Sue Healy and Andrea Griffin for comments on the discussion and two anonymous reviews for comments on the manuscript.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
This video is a successful trial (pass) in the Colour association task. Yellow was the S+, and blue was the S- (MPG 8512 kb)
This video is an unsuccessful trial (fail) in the Colour association task. Red was the S+, and green was the S- (MPG 5976 kb)
This video is a successful trial (pass) in the Colour association task. Yellow was the S+, and blue was the S- (MPG 18054 kb)
This video is an unsuccessful trial (fail) with the transparent tube in the Detour-reaching task (MPG 1788 kb)
This video is a successful trial (pass) with the transparent tube in the Detour-reaching task (MPG 1070 kb)
Rights and permissions
About this article

Cite this article
Guillette, L.M., Hahn, A.H., Hoeschele, M. et al. Individual differences in learning speed, performance accuracy and exploratory behaviour in black-capped chickadees. Anim Cogn 18, 165–178 (2015). https://doi.org/10.1007/s10071-014-0787-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10071-014-0787-3