
Abstract
Rat exploration is an organized series of trips. Each exploratory trip involves an outward tour from the refuge followed by a return to the refuge. A tour consists of a sequence of progressions with variable direction and speed concatenated by stops, whereas the return consists of a single direct progression. We have argued that processing self-movement information generated on the tour allows a rat to plot the return to the refuge. This claim has been supported by observing consistent differences between tour and return segments independent of ambient cue availability; however, this distinction was based on differences in movement characteristics derived from multiple progressions and stops on the tour and the single progression on the return. The present study examines movement characteristics of the tour and return progressions under novel-dark and light conditions. Three novel characteristics of progressions were identified: (1) linear speeds and path curvature of exploratory trips are negatively correlated, (2) tour progression maximum linear speed and temporal pacing varies as a function of travel distance, and (3) return progression movement characteristics are qualitatively different from tour progressions of comparable length. These observations support a role for dead reckoning in organizing exploratory behavior.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Studies investigating rat exploratory behavior have shown several levels of movement organization. At a macro level, rats set up a home base and structure their movements around this location (Eilam and Golani 1989; Whishaw et al. 1983). The rat's movements through an environment can be characterized as a set of waxing and waning progressions having distinct speeds or “gears” (Tchernichovski et al. 1998; Drai et al. 2000). These macro characteristics of exploration have been observed in enclosed environments of varying size (Eilam 2003; Eilam et al. 2003; Gharbawie et al. 2004) and environments without walls (Wallace et al. 2002b). At a micro level, rats appear to structure their exploratory trips into tours, each of which is ended by a return to the home base (Wallace et al. 2002b). A tour is a circuitous path through the environment consisting of a number of progressions and stops. A return is a single noncircuitous progression, directed toward the home base with moment-to-moment speeds increasing to a peak that is at the midpoint of the path then decreasing until the home base is reached (Wallace and Whishaw 2003). This micro-level structure in exploratory trips has been observed independently of allothetic cue availability, thereby suggesting a role for dead reckoning based navigation in organizing exploratory behavior.
Dead reckoning is an online navigational strategy that involves processing self-movement cues (vestibular cues, proprioceptive cues, sensory flow, or efference copy of movement commands) within a temporal context such that an animal can plot a trajectory to the location where movements were initiated (Darwin 1873; Murphy 1873; Barlow 1964; Mittelstaedt and Mittelstaedt 1980; Etienne et al. 1986; Gallistel 1990; Séguinot et al. 1993; Maaswinkel and Whishaw 1999; for a recent review see Etienne and Jeffery 2004). Prior studies have suggested that rats use dead reckoning to organize exploratory behavior; however, these claims have two weaknesses. First, they were based on procedures in which exploration under dark conditions has always followed exploration under light conditions. It is possible that subsequent to light testing, rats recall a representation of the environment and use it in combination with dead reckoning to guide movement during dark testing. As its first objective, this study examines the micro-level organization of exploratory trips under novel dark conditions.
Second, previous analysis of single exploratory trips involved comparing the kinematic and topographic characteristics of behavior prior to the last stop (tour segment) to the behavior that occurred after the last stop (return segment). Although the return segment has distinctive kinematic and topographic features, it is unclear whether this progression is truly unique or whether its properties are simply a reflection of its length. The second purpose of the present study was to examine the kinematic and topographic features of all progressions made by rats on an exploratory trip with the aim of determining whether tour and return progressions have unique features. Each exploratory trip was broken down into tour progressions, stops, and the return progression. This analysis permitted direct comparisons of progressions as a function of their length. If tour and return segments of trips are distinctive, then their kinematics should be different, whereas if they are not distinctive, then their kinematic profiles should reflect the distance of a progression irrespective of where it might occur.
Methods
Animals
The subjects were five female Long–Evans rats (University of Lethbridge vivarium) weighing approximately 250–300 g. Rats were housed in groups of two or three in Plexiglas cages in the colony room. The temperature of the colony room was maintained at 20–21°C with a 12 h/12 h light/dark cycle. During the course of the experiment, rats were permitted ad lib access to food in their home cages.
Apparatus
The apparatus was a wooden circular table without walls measuring 250 cm in diameter. The table was painted white and mounted on ball bearings that permitted it to be rotated. The table was located in a large room that could either be illuminated or made completely dark. A small dark box (20 cm×29 cm×22 cm) with a circular hole (11.5 cm in diameter) in one of the sides was placed on the edge of the table to be used as a home base by the rat. The surface of the table was approximately 64 cm above the floor. The table was rotated between rats and wiped down after testing each rat.
An infrared camera was positioned perpendicular to the table. The testing room was lightproof, such that when the lights were turned off during dark testing conditions, the room was completely dark. The experimenter used a set of infrared goggles to test the animals under complete dark conditions. Infrared is a range of wavelengths that the rat is not able to detect (Neitz and Jacobs 1986).
Procedures
Each rat was individually removed from the colony room and transported to the testing room. The rats were transported in an opaque Plexiglas cage covered with a cloth, thereby precluding the animals’ access to visual stimuli. During the transport from the colony room to the testing room, the rat was rotated several times by the experimenter. The path taken from the colony to the testing room varied across testing days. After the experimenter entered the testing room, the rat was placed in the home base and was free to explore the table for 50 min. All rats were initially tested under complete dark conditions for 3 days. On the first day of dark testing, the room was novel. After dark testing, rats were tested under light conditions in the same room.
Single exploratory trips were defined as a departure from the home base, locomotor activity on the table that displaced the animal at least halfway across the table (125 cm), and ending when the rat returned to the home base. Golani and coworkers distinguish between different modes of exploration as episodes of lingering and progressions (Drai et al. 2000). Lingering refers to locomotor behavior that is restricted to a small area, usually around the home base, whereas movements between areas are classified as progressions. Our criteria for an exploratory trip eliminated exploratory behavior that was classified as lingering close to the home base. Therefore, exploratory trips were characterized as sets of progressions punctuated with brief stops.
Data analysis
Digitizing exploratory behavior
Exploratory trips were converted from analog recordings to digital computer files using the Peak Performance motion capturing system (Peak Performance Technologies, Inc., Centennial, CO). The analog recordings were sampled at a rate of 30 Hz (30 frames per s). Digitizing the exploratory trip involved manually tracking a single point on the animal's body. One pixel was selected every 5th frame (resulting in 5 samples per s) that corresponded to the midline of the rat's back at the level of the forelimbs. Moment-to-moment speeds and scaled x- y-coordinates were computed from the raw data.
Analysis of exploratory trips
The first 10–15 exploratory trips that were at least halfway across the table were selected for analysis. Figure 1 presents the topographic (top panel) and kinematic (bottom panel) profiles for a single exploratory trip. Exploratory trips were broken down into tour and return segments. The tour segment was defined as the portion of the path linking the initial departure from the home base to the last stop made prior to return to the home base (see Fig. 1: solid lines). Stops were defined as periods of time in which movement did not exceed 0.1 m/s (see Fig. 1: white circles in the top panel). A return was defined as the portion of the path linking the last stop to the arrival at the home base (see Fig. 1: dotted lines). Tour segments were further divided into progressions that corresponded to periods of time in which speed exceeded 0.1 m/s. Therefore, the tour segment was characterized as a series of progressions. Four of the longest progressions are labeled A, B, C, and D in the topographical (top panel) and kinematic (bottom panel) profiles of Fig. 1. The return progression is labeled E in the topographical (top panel) and kinematic (bottom panel) profiles of Fig. 1.

The top panel presents the topographic arrangement of tour progressions, stops, and the return progression for one exploratory trip under dark conditions in a novel environment. The moment-to-moment speeds are plotted in the bottom panel for the exploratory trip. The circuitousness values are provided for the four longest tour progressions (A through D) and the return progression (E)
Several measures were used to quantify different aspects of tour and return progressions: circuitousness, correlation between instantaneous linear and angular speeds, distance traveled, maximum speed, correlation between distance traveled and maximum speed, and standard deviation in the relative location of the peak in speed. First, circuitousness is a measure of the straightness of a path and was calculated by determining the distance between the point where the progression started and the point where the progression ended and dividing that value by the distance that was actually traveled. Direct progressions through an environment are associated with circuitousness values of 1.0–0.8. Paths restricted to the periphery of the table are associated with values of 0.7–0.6. As the circuitousness values further decrease, progressions become progressively less direct. Circuitousness values were calculated for all tour and return progressions observed on exploratory trips. Second, the correlation between instantaneous linear and angular speeds involved calculating the change in heading between consecutive x- y-coordinates. The change in heading was then divided by the time period in which the movement occurred. The resulting measure of instantaneous angular speed was correlated to the corresponding linear speeds from a single exploratory trip. Correlations were generated for all exploratory trips under both testing conditions. Third, distances and maximum speeds were calculated from the scaled x- y- coordinates for tour and return progressions observed on all exploratory trips. Fourth, distances from progressions across all of the exploratory trips were correlated to their associated maximum speeds. Finally, the relative location of the peak speed was calculated for tour and return progressions for each exploratory trip. The relative location of the peak in speed for a progression was defined as the ratio between the distance from the start of the progression to the location of the peak and the overall distance of the progression. To compare the long tour progressions to return progressions, tour progressions were sorted from shortest to longest. Then, the tour progressions were divided into three categories: short, medium, and long. For every rat, the standard deviation of the relative peak location was calculated for each category of tour progressions and return progressions. In addition, the average distance was calculated for each category of tour progressions and the return progressions.
Results
Timing of exploratory trips
The top panel of Fig. 2 plots the amount of time spent exploring the table and the amount of time spent in the home base under novel dark conditions. During the testing session, animals spent an average of 25.4 min on the table and 28.4 min in the home base. The bottom panels of Fig. 2 plot ethograms for short and long exploratory trips that occurred under novel dark testing for each rat. Short exploratory trips were characterized as movements that were restricted to the half of the table with the home base. Exploratory trips that were at least halfway across the table were classified as long. Rats took an average of 23.4 s to make their first short trip and 3.49 min to make their first long trip.

The top bar graph plots each animal's distribution of time (in seconds) between exploring the table and remaining in the home base under the dark condition in a novel environment. The lower five graphs are ethograms reflecting the occurrence of short (short black bars) and long (long black bars) exploratory trips under novel dark conditions. Short trips were defined as movements that did not displace the rat halfway across the table. Long trips were defined as movement that displaced the rat at least halfway across the table. The width of the bar indicates the duration of the trip. White spaces indicate the time spent in the home base
Progression circuitousness
Figure 3 presents each rat's average progression circuitousness under light and dark conditions for tour and return segments. While the ANOVA conducted on circuitousness revealed a significant difference between novel dark (M=0.93) and light (M=0.96) testing conditions [F(1,4)=10.6, p=0.03], progressions were noncircuitous paths through the environment. Both the effect of trip segment and trip segment by testing condition interaction were not significant. Tour and return progressions were noncircuitous paths.

The average tour and return progression circuitousness for each rat under novel dark (gray panel) and light (white panel) conditions are plotted in the left-hand panel. The right-hand panel plots the average circuitousness collapsed across rats for tour and return segments under both testing conditions

The topographic and linear speeds associated with a single exploratory trip are plotted in the top panel. The linear speeds for each segment of the path are represented by the width of the gray region. The bottom panel plots linear (left axis) and angular speeds (right axis) for the exploratory trip. The r value corresponds to the correlation between the linear and angular speeds for the plotted exploratory trip

The average correlation between linear and angular speeds for each rat under novel dark (gray panels) and light (white panels) conditions are plotted in the left-hand panels. The right-hand panel plots the average correlation between linear and angular speeds collapsed across rats under both testing conditions
Instantaneous linear and angular speed correlations
The top panel of Fig. 4 presents topographic (solid/dotted black line) and kinematic characteristics (width of gray region represents moment-to-moment speeds) of a single exploratory trip. Most of the changes in heading direction occurred during slower speeds. The bottom panel of Fig. 4 plots instantaneous linear and angular speeds for the exploratory trip; high path curvature was associated with slow linear speeds. Figure 5 presents each rat's average correlation between instantaneous linear and angular speeds for exploratory trips under novel dark and light conditions. Average instantaneous linear and angular speed correlations were significantly different from zero under novel dark [T(4)=−27.4, p<0.001] and light [T(4)=−102.0, p<0.001] conditions. Linear speed is inversely related to angular speed observed during the exploratory trip.

Topographic characteristics of tour (left) and return (right) segments are plotted from one rat's exploratory trips under novel dark (gray) and light (white) testing sessions
Segment distances
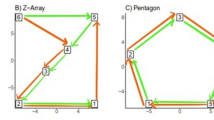
Tour (left) and return (right) progressions for one rat are plotted in Fig. 6. Tour progressions are composed of many direct paths that vary in length. In contrast, the return progression is typically a longer path. This pattern is observed in all rats under both novel dark and light conditions. Figure 7 presents each rat's average distance traveled on tour progressions [M=0.63 m] and return progressions [M=1.53 m]. The ANOVA conducted on average tour and return progression distances under both conditions revealed a significant segment effect [F(1,4)=206.5, p<0.001] and a significant segment (tour vs. return) by testing condition interaction [F(1,4)=12.4, p=0.02]. In general, the distance traveled is longer on return progressions relative to tour progressions, and this difference is significantly larger under light conditions.

The average tour and return distance traveled for each rat under novel dark (gray panel) and light (white panel) conditions are plotted in the left-hand panel. The right-hand panel plots the average distance traveled collapsed across rats for tour and return segments under both testing conditions
Progression maximum speeds
Tour (left) and return (right) moment-to-moment speeds for one rat are diagrammed in Fig. 8. Tour segments are composed of several slow progressions that vary in duration. In contrast, a return segment is typically characterized as a rapid increase and subsequent decrease in speed. This pattern is observed under both testing conditions. Figure 9 presents each rat's average maximum speed on tour [M=0.33 m/s] and return [M= 0.77 m/s] progressions. The ANOVA conducted on average tour and return progression maximum speeds under both conditions revealed a significant segment effect [F(1,4)=74.7, p<0.001], a significant testing condition effect [F(1,4)=28.8, p=0.006], and a significant trip segment by testing condition interaction [F(1,4)=56.8, p=0.002]. In general, faster maximum speeds are observed on the return progressions relative to tour progressions, and this difference is significantly larger under light conditions.

Kinematic characteristics of tour (left) and return (right) segments are plotted from one rat's exploratory trips under novel dark (gray) and light (white) testing sessions
Distance – maximum speed correlations
The left hand and middle panels of Fig. 10 plot distances by maximum speeds from one rat under dark and light conditions, respectively. The right-hand panel of Fig. 10 presents average correlations for exploratory trips under light and dark conditions. Average distance and maximum speed correlations were significantly different from zero under novel dark [T(4)=39.2, p<0.001] and light [T(4)=45.2, p<0.001] conditions. Travel distance of the progression is directly related to the peak in speed obtained on the progression.

The average tour and return maximum speed for each rat under novel dark (gray panel) and light (white panel) conditions are plotted in the left-hand panel. The right-hand panel plots the average maximum speed collapsed across rats for tour and return segments under both testing conditions

Progression travel distance is plotted by maximum speed under novel-dark (left- hand panel) and light (right-hand panel) conditions for a single rat. The right-hand panel plots the average correlations between travel distance and maximum speed under novel-dark and light conditions
Progression-relative location of peak speed
Figure 11 presents one rat's relative locations of peak speeds for tour and return progressions under novel dark conditions. As the distance of the tour progressions increases, there is a systematic increase in the variability of the relative locations of peak speeds. Although return progressions are similar in average length to long tour progressions, return progressions are associated with much less variability in relative locations of peak speeds. The left panel of Fig. 12 plots average standard deviations in relative locations of peak speeds for short, medium, and long tour progressions. The ANOVA conducted on standard deviations in relative locations of peak speeds revealed a significant effect of condition [F(1,4)=22.31, p=0.009], effect of segment length [F(2,8)=18.91, p<0.001], and condition by segment length interaction [F(2,8)=23.18, p<0.001]. Posthoc analysis of segment length revealed a significant linear trend across short, medium, and long progression segments [F(1,4)=34.47, p=0.004].
The right panel of Fig. 12 plots the average variability in the relative locations of peak speeds observed on the return progressions under both conditions. The ANOVA conducted on variability in relative locations of peak speeds observed between long tour and return segments revealed a significant effect of condition [F(1,4)=27.98, p=0.006], segment [F(1,4)=52.81, p=0.002], and condition by segment interaction [F(1,4)=8.04, p=0.047]. There was significantly less variability in the relative locations of peak speeds observed on return progressions relative to long tour progressions, and this difference was significantly greater under dark conditions.
Discussion
The first goal of the present study was to examine the extent that rats organize their exploratory behavior under novel dark conditions. Under these conditions, rats structured their exploration into a series of trips, consisting of tours and returns organized around a home base as occurs in tests given in the light. The second goal investigated whether kinematic and topographic features of the return progressions are a unique component of exploratory behavior. Analysis of exploratory trip kinematic and topographic characteristics revealed a systematic relationship between linear and angular speeds. Increased linear speed was associated with limited angular speed and vice-versa. In addition, examination of the exploratory trip progressions revealed that the return progression has unique kinematic features with respect to tour progressions of similar length. The following sections discuss how these observations provide further support for the claim that rats use dead reckoning to organize exploratory behavior.
Rats display home base behavior under novel dark and light conditions
Two aspects of our data demonstrate that rats adopt a refuge as a home base under novel dark conditions. First, they spend approximately half of their time during an exploratory session at this location. Second, exploratory trips are organized around this location. In addition, the general organization of trips in the dark were very similar to trips in the light, in which rats make a number of progressions and stops on a tour and a more rapid direct progression on the return.

Each panel plots the relative locations of peak speeds and maximum speed for a progression. The left panel plots short, medium, and long progressions from the tour segments of 15 exploratory trips. The right panel plots return progressions associated with the 15 exploratory trips. Box plots are positioned above tour and return progressions to indicate the central tendency and range of relative locations of peak speeds. Standard deviation of the relative locations of peak speeds and average distance are provided for each class of progressions

The left panel plots the average standard deviation of relative locations of peak speeds for short, medium, and long progressions under novel dark (black bars) and light (white bars) conditions. The right panel plots the average standard deviation of relative location of peak speeds for return progressions under both conditions. The numbers on the bars indicate the average distance associated with each class of progressions
Thus, just as home base behavior in the light may be aided by piloting strategies in response to ambient visual cues (Hines and Whishaw 2005), home base behavior in the dark may be facilitated by processing of self-movement information. This conclusion is supported by the results of Golani and coworkers (Golani et al. 1993; Drai and Golani 2001; Eilam et al. 2003) who report that rats establish what they operationally define as virtual home bases in light conditions in a room that is devoid of salient visual cues. Presumably, in addition to finding the home base using self-movement cues, olfactory and tactile cues instruct the rats that the real home base used in the present study, although not visible, is a refuge.
It is also possible that home base behavior may facilitate processing self-movement information. Dead reckoning based navigation becomes progressively more inaccurate with the accumulation of self-movement information (Benhanou et al. 1990). Although dead reckoning systems can be recalibrated by providing a visual fix of the environment (Biegler and Morris 1996; Etienne et al. 2000; for a review see Biegler 2000), the ability of other sensory modalities to recalibrate the system is unknown. For example, tactile or odor properties of the refuge may be sufficient to reset the dead reckoning process, thereby maintaining a minimal amount of error. Studies have yet to directly examine the influence of varying the tactile or olfactory stimulus characteristics on home base behavior or dead reckoning. It is possible that varying the size of the refuge may change the rat's ability to reset accumulating errors, thereby influencing the organization of exploratory behavior.
Linear and angular speeds of exploratory trips are inversely related
The examination of the kinematic and topographic properties of exploratory trips indicated that linear and angular speeds were inversely related. Simply stated, the faster rats moved, the straighter they went. Consequently, changes in heading direction were observed during periods of slow linear speed. It is likely that kinematic organization is useful to the navigating rat in that it allows separate calculations related to distance traveled and direction traveled. Such a distinction would not only be useful in determining the relationships between ambient visual cues but would also assist dead reckoning which relies on vestibular information derived from linear and angular acceleration (Wallace et al. 2002a). One way that the segmentation of linear and angular modes of movement would be useful is to increase the “gain” associated with linear and angular accelerations. For example, the continuous movement associated with traveling in a large arc may result in subthreshold changes in angular speeds. In contrast, decomposing the large arc into a sequence of linear and angular movements focuses changes in angular speed to discrete locations along the path, thereby increasing the likelihood that angular acceleration will be detected by the vestibular system. Therefore, this type of segmentation of movement may serve to enhance processing of self-movement information and reduce errors inherent to dead reckoning.
The sequential organization of linear and angular modes of movement parallels findings in the human voluntary movement literature. The two-thirds power law relates linear speed to the geometry, or curvature, of the path associated with the movement (Lacquaniti et al. 1983). Although this relationship has been known to exist for over a century (Binet and Courtier 1893), it has been recently quantified in smooth pursuit eye movements, voluntary hand movements, and human locomotion research (Lacquaniti et al. 1983; de’Sperati and Viviani 1997; Vieilledent et al. 2001). The sequencing of different movement modes has been taken as evidence that a continuous stream of movement reflects a concatenation of simple motor primitives (Viviani and Flash 1995). Additional support for this perspective is observed in studies investigating the development of drawing movements (Viviani and Schneider 1991), recovery of continuous movements after stroke (Krebs et al. 1999), and organization of navigation movements in humans who are disorientated (Wallace et al. in press). Each of these studies demonstrates a disruption in the normal sequencing of movements and the presence of a repertoire of motor primitives. Although these disruptions in normal motor sequencing are evidence against biomechanical explanations of movement organization, the nature of the process or processes that coordinate the sequential programming of these motor primitives remains elusive and controversial (Viviani and Schneider 1991; Krebs et al. 1999; however see Sternad and Schaal 1999).
Kinematic features of progressions show that tour and return progressions are distinct
The relationship between linear and angular speed provided a novel method to fractionate exploratory trip movements into distinct components. An exploratory trip is segmented into a series of progressions or movements bounded by stops. The present analysis indicated that tour and return progressions differed in a number of movement characteristics. First, progressions observed on the tour segment varied considerably in their travel distance in contrast to return progressions. Examining the variability in travel distance observed across tour progressions revealed that, as travel distance increased, both maximum speed and variability in temporal pacing increased. Although the relationship between travel distance and maximum speed may reflect prospective codes for the distance to be traveled, further work is needed to evaluate this claim. In addition, the increased variability of temporal pacing associated with longer tour progressions could be interpreted as decreased accuracy in the prospective code.
Second, return progressions were consistently longer than average tour progressions. Nevertheless, when return progressions were compared to similar length tour progressions, return progressions were still associated with faster maximum speeds and invariant temporal pacing. It is interesting to note that the temporal pacing observed on return progressions parallels movement characteristics observed during nonvisually guided planar reaching in humans (Gordon et al. 1994). When hand trajectory velocities are normalized for magnitude and distance, consistent temporal pacing is observed across varying distances. These results suggest that subjects are generating movements based on internal rather than external guidance. Therefore, temporal pacing observed on return progressions supports a role for dead reckoning in generating trajectories towards the home base.
It is important to note that these differences in the kinematics of tour and return progressions were observed under both novel dark and light conditions. Thus, it is likely that returns under both conditions may be generated in the same way. Although these results suggest that environmental familiarity and visual cue availability are not critical for exploratory trip organization, it does not imply that rats only use dead reckoning to structure their movements. In fact, we posit that during stops, even stops that occur in the dark, rats may attend to the stimulus characteristics of landmarks (visual, olfactory, somatosensory) in the environment and encode the relationships between them. Therefore, as an environment is explored, rats may process both allothetic and idiothetic information concurrently or sequentially. This notion has been supported by studies demonstrating that rats can readily switch between navigational strategies (Whishaw and Mittleman 1986; Maaswinkel and Whishaw 1999; Hamilton et al. 2004).
Conclusion
Several studies have suggested a role for dead reckoning in organizing exploratory behavior. This study investigated two hypotheses related to this claim. First, do animals set up a home base under novel dark conditions? Previous studies investigating dark exploration involved dark testing subsequent to light testing. Therefore, organization of exploration under dark conditions may have reflected reactivation of information acquired under previous light testing. The present study observed that rats set up a home base under novel dark conditions. They spent a majority of their time in the home base and organized their exploratory behavior around this location.
Second, is the return segment a unique component of exploratory behavior? Previous studies have examined kinematic and topographic differences between the tour segment and the return segment; however, the tour segment reflects multiple progressions and stops. Therefore, kinematic and topographic differences between tour and return segments may reflect comparing the average of multiple progressions of varying lengths across the tour segment to the single progression on the return. This study observed several novel characteristics of movement organization: (1) Rats display an indirect relationship between linear and angular speed; (2) Tour progressions vary in maximum speed and temporal pacing depending on the length of the progression; (3) Return progressions were associated with faster speeds and invariant temporal pacing, relative to tour progressions of equal length. These results suggest that the return progression is a unique component of exploratory behavior.
Observing these characteristics independently of environmental familiarity and visual cue availability is consistent with a role for dead reckoning based navigation in organizing exploratory behavior. Although it is likely that rats also encode stimulus characteristics of landmarks in the environment as the environment becomes more familiar, determining how navigational strategies are combined during exploration will require further research.
References
Barlow JS (1964) Inertial navigation as a basis for animal navigation. J Theor Biol 6:76–117
Benhanou S, Sauvé JP, Bovet P (1990) Spatial memory in large scale movements: Efficiency and limitations of the egocentric coding processes. J Theor Biol 145:1–12
Biegler R (2000) Possible uses of path integration in animal navigation. Anim Learn Behav 28(3):257–277
Biegler R, Morris RGM (1996) Landmark stability: further studies pointing to a role in spatial learning. Q J Exp Psychol B 49(4):307–345
Binet A, Courtier J (1893) Sur la vitesse des gestes graphiques [On the speed of graphic movements]. Rev Philos 35:664–671
Darwin C (1873) Origin of certain insects. Nature 7:417–418
de’Sperati C, Viviani P (1997) The relationship between curvature and velocity in two-dimensional smooth pursuit eye movements. J Neurosci 17(10):3932–3945
Drai D, Golani I (2001) SEE: a tool for the visualization and analysis of rodent exploratory behavior. Neurosci Biobehav Rev 25(5):409–426
Drai D, Benjamini Y, Golani I (2000) Statistical discrimination of natural modes of motion in rat exploratory behavior. J Neurosci Methods 96(2):119–131
Eilam D (2003). Open-field behavior withstands drastic changes in arena size. Behav Brain Res 142(1–2):53–62
Eilam D, Golani I (1989) Home base behavior of rats (Rattus norvegicus) exploring a novel environment. Behav Brain Res 34(3):199–211
Eilam D, Dank M, Maurer R (2003) Voles scale locomotion to the size of the open-field by adjusting the distance between stops: a possible link to path integration. Behav Brain Res 141(1):73–81
Etienne AS, Jeffery KJ (2004) Path integration in mammals. Hippocampus 14:180–192
Etienne AS, Maurer R, Saucy F, Teroni E (1986) Short distance homing in the golden hamster after a passive outward journey. Anim Behav 34:696–715
Etienne AS, Boulens V, Maurer R, Rowe T, Siegrist C (2000) A brief view of known landmarks reorientates path integration in hamsters. Naturwissenschaften 87:494–498
Gallistel CR (1990) The organization of learning. MIT Press, Cambridge, MA
Gharbawie OA, Whishaw PA, Whishaw IQ (2004) The topography of three-dimensional exploration: a new quantification of vertical and horizontal exploration, postural support, and exploratory bouts in the cylinder test. Behav Brain Res 151(1–2):125–135
Golani I, Benjamini Y, Eilam D (1993) Stopping behavior: constraints on exploration in rats (Rattus norvegicus). Behav Brain Res 53(1–2):21–33
Gordon J, Ghilardi MF, Cooper SE, Ghez C (1994) Accuracy of planar reaching movements. II. Systematic extent errors resulting from inertial anisotropy. Exp Brain Res 99:112–130
Hamilton DA, Rosenfelt CS, Whishaw IQ (2004) Sequential control of navigation by locale and taxon cues in the Morris water task. Behav Brain Res 154(2):385–397
Hines DJ, Whishaw IQ (2005) Home bases formed to visual cues but not to self-movement (dead reckoning) cues in exploring hippocampectomized rats. Eur J Neurosci 22(9):2363–2375
Krebs HI, Aisen ML, Volpe BT, Hogan N (1999) Quantization of continuous arm movements in humans with brain injury. Proc Natl Acad Sci USA 96(8):4645–4649
Lacquaniti F, Terzuolo C, Viviani P (1983) The law relating the kinematic and figural aspects of drawing movements. Acta Psychol (Amst) 54(1–3):115–130
Maaswinkel H, Whishaw IQ (1999) Homing with locale, taxon, and dead reckoning strategies by foraging rats: sensory hierarchy in spatial navigation. Behav Brain Res 99(2):143–152
Mittelstaedt ML, Mittelstaedt H (1980) Homing by path integration in a mammal. Naturwissenschaften 67:566–567
Mittelstaedt ML, Mittelstaedt H (2001) Homing by path integration in a mammal. Naturwissenschaften 67:566–567
Murphy JJ (1873) Instinct: a mechanical analogy. Nature 7:483
Neitz J, Jacobs GH (1986) Reexamination of spectral mechanisms in the rat (Rattus norvegicus). J Comp Psychol 100(1):21–29
Séguinot V, Maurer R, Etienne AS (1993) Dead reckoning in a small mammal: the evaluation of distance. J Comp Physiol [A] 173:103–113
Sternad D, Schaal S (1999) Segmentation of endpoint trajectories does not imply segmented control. Exp Brain Res 124(1):118–136
Tchernichovski O, Benjamini Y, Golani I (1998) The dynamics of long-term exploration in the rat. Part I. A phase-plane analysis of the relationship between location and velocity. Biol Cybern 78(6):423–432
Vieilledent S, Kerlirzin Y, Dalbera S, Berthoz A (2001) Relationship between velocity and curvature of a human locomotor trajectory. Neurosci Lett 305(1):65–69
Viviani P, Flash T (1995) Minimum-jerk, two-thirds power law, and isochrony: converging approaches to movement planning. J Exp Psychol Hum Percept Perform 21(1):32–53
Viviani P, Schneider R (1991) A developmental study of the relationship between geometry and kinematics in drawing movements. J Exp Psychol Hum Percept Perform 17(1):198–218
Wallace DG, Whishaw IQ (2003) NMDA lesions of Ammon's horn and the dentate gyrus disrupt the direct and temporally paced homing displayed by rats exploring a novel environment: evidence for a role of the hippocampus in dead reckoning. Eur J Neurosci 18(3):513–523
Wallace DG, Hines DJ, Pellis SM, Whishaw IQ (2002a) Vestibular information is required for dead reckoning in the rat. J Neurosci 22(22):10009–10017
Wallace DG, Hines DJ, Whishaw IQ (2002b) Quantification of a single exploratory trip reveals hippocampal formation mediated dead reckoning. J Neurosci Methods 113(2):131–145
Wallace DG, Choudhry S, Martin MM (in press) Comparative analysis of dead reckoning based navigation in humans (Homo sapiens) and rats (Rattus norvegicus). J Comp Psychol
Whishaw IQ, Mittleman G (1986) Visits to starts, routes, and places by rats (Rattus norvegicus) in swimming pool navigation tasks. J Comp Psychol 100(4):422–431
Whishaw IQ, Kolb B, Sutherland RJ (1983) The analysis of behavior in the laboratory rat. In: Robinson TE (ed) Behavioral approaches to brain research. Oxford University Press, New York, pp 141–211
Acknowledgements
This research was supported by grants from Alberta Heritage Foundation for Medical Research and the Canadian Institute of Health Research. All experimental procedures in this study were approved by the University of Lethbridge Animal Care Committee, which follows the standards set by the Canadian Council on Animal Care. The authors would like to acknowledge the comments of Patricia Wallace on previous drafts of the paper. We would also like to thank Felicia Drever, Irene Loewen, and Logan Bennett for data collection and analysis related to this project.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Wallace, D.G., Hamilton, D.A. & Whishaw, I.Q. Movement characteristics support a role for dead reckoning in organizing exploratory behavior. Anim Cogn 9, 219–228 (2006). https://doi.org/10.1007/s10071-006-0023-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10071-006-0023-x