
Abstract
Two experiments explored the duration of dogs' working memory in an object permanence task: a delay was introduced between the disappearance of a moving object behind a box and the beginning of the search by the animal. In experiment 1, the dogs were tested with retention intervals of 0, 10, 30, and 60 s. Results revealed that the dogs' accuracy declined as a function of the length of the retention interval but remained above chance for each retention interval. In experiment 2, with new subjects, longer retention intervals (0, 30, 60, 120, and 240 s) were presented to the dogs. Results replicated findings from experiment 1 and revealed that the dogs' accuracy remained higher than chance level with delays up to 240 s. In both experiments, the analysis of errors also showed that the dogs searched as a function of the proximity of the target box and were not subject to intertrial proactive interference. In the discussion, we explore different alternatives to explain why dogs' search behaviour for hidden objects decreased as a function of the retention intervals.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Several animal species face situations in which animate objects move and disappear from sight momentarily. For example, hunting demands from animals the ability to track and locate hiding prey. Other crucial behaviours, such as feeding or mating, require the need to maintain interaction with social partners that have moved and disappeared. Étienne (1973, 1984) classified into three levels the different kinds of strategies that are present in the animal kingdom to locate physical or social hidden objects. The first level is observed in predatory species of various phyla (e.g. spiders, insects). Through evolution, these species have developed stereotyped movements or postures to increase the probability of contacting and catching prey that has disappeared. These strategies, however, are limited to objects that have an immediate survival value and last for a limited period of time (Doré and Goulet 1998). The second level of action is based on instrumental learning. For some species, such as rabbits and chicks, the ability to find hidden objects is demonstrated only if they have previously been trained to locate and find a specific type of moving object in a particular situation. This kind of action is not flexible and does not generalise to new objects and new situations. Finally, the ultimate level of locating and finding hidden objects is based on a spontaneous and active search behaviour. This last level corresponds to a flexible cognitive structure known as object permanence, which develops during ontogeny and provides the understanding that objects continue to exist even when they are no longer available to immediate perception in the environment (Piaget 1937/1967).
In the last 20 years, the theory of cognitive development of object permanence, which provides an appropriate and valuable framework to determine whether a particular species is spontaneously able to locate a hidden object, has been extensively and successfully used by animal psychologists (for a review, see Doré and Dumas 1987; Doré and Goulet 1998). According to the theoretical framework of object permanence, the ability to locate and find a hidden object can be determined by an experimental situation called a visible displacement (VD) task. In this task, the animal faces a row of identical boxes (normally four) and sees an attractive object moving and disappearing behind or under one of the boxes. After the object's disappearance, the animal is immediately released to search for the object and is rewarded if it finds the target object behind the first visited box. The studies using this procedure have demonstrated that many species, such as cats (Doré 1986, 1990; Dumas and Doré 1989, 1991; Goulet et al. 1994; Gruber et al. 1971; Thinus-Blanc et al. 1982; Triana and Pasnak 1981), dogs (Gagnon and Doré 1992, 1993, 1994; Triana and Pasnak 1981), nonhuman primates (Call 2001; De Blois and Novak 1994; De Blois et al. 1998, 1999; Mathieu et al. 1976; Natale et al. 1986; Parker 1977; Redshaw 1978; Wood et al. 1980), and psittacids (Funk 1996; Pepperberg and Funk 1990; Pepperberg and Kozak 1986), are highly successful in spontaneously pursuing and retrieving animate objects hidden behind one or successive specific spatial locations in the environment.
Recently, a small number of animal studies have focussed on determining the spatial and memory mechanisms underlying spontaneous search behaviour in object permanence tasks and what type of spatial information is encoded and used to successfully locate a disappearing object (Fiset and Doré 1996; Fiset et al. 2000). For the moment, however, this approach is mostly restricted to the study of cats and dogs because the scientific investigation of search behaviour for hidden objects is much more advanced in these two species than in others (Doré et al. 1996). Nevertheless, it appears that in cats and dogs, the spatial encoding processes of hidden objects are highly flexible. Studies by Fiset and Doré (1996) showed that cats base their search behaviour on their own spatial position (egocentric frame of reference) or on some global landmarks (allocentric frame of reference) according to the circumstances they encounter in the environment. In dogs, allocentric and egocentric information are both simultaneously encoded but they base their search behaviour primarily on an egocentric frame of reference (Fiset et al. 2000).
The present study extended this approach and focussed on the duration of the memory mechanisms underlying the search for disappearing objects in animals. More specifically, we investigated the retention interval that dogs can tolerate after the object's disappearance with a VD-like object permanence task: a delay was introduced between the disappearance of the object behind a target box and the beginning of the search by the animal. To locate and find a hidden object in this task, animals must encode and maintain spatial information on the spatial location of the hiding place for a limited period of time in working memory (Goulet et al. 1996). This cognitive structure preserves an active representation of the most recently encoded spatial information used to locate the target object. Therefore, to retrieve a disappearing object successfully, the animal must encode in working memory the position where the object is hidden and later recall and use this information to locate and find the target object. In the experimental context of a VD task, Goulet et al. (1994) affirmed that the encoded information must be reset from working memory after each trial because the hiding location (target box) changes from trial to trial.
The VD task is analogous to the delayed-response (DR) task, which was developed by Hunter (1913) and extensively used to compare duration of memory in different species at the beginning of the twentieth century. As in the DR task, the animal must retain the spatial position of a target object for a limited time in the VD task. However, in the VD task, there are several potential target locations (up to five), whereas in the DR task, there are usually only two or occasionally three (Goulet et al. 1996). In addition, the movements of the target object at the beginning of each trial are much more complex in the VD task: the animal visually has to track the target object in front of the other potential hiding locations. By contrast, in most of the studies using the DR task, the target object is already positioned at the target location and the target cover is simply lifted up to show the spatial position of the target object. When the target object is moved in a DR task, the object goes directly behind the target location without interfering with the other potential locations (for an example, see Vallortigara et al. 1998). Finally, whereas the DR task may be adapted to study spatial memory for visual and/or auditory information, the VD task is mainly a visual task. Recent studies have revealed that dogs' spatial memory for auditory information declines gradually between 0 and 120 s but remains far above chance (Kowalska 1995, 2000), and there is evidence that dogs can retain visual information for up to 5 min in a DR task (see Hunter 1913).
The delayed-nonmatching-to-sample (DNMS) task has also been used to determine the duration of dogs' working memory. For example, Milgram et al. (1994) have shown that a visual DNMS task is too difficult for dogs: several dogs did not reach the 10-s acquisition criterion within 400 trials. To take into account the importance of spatial information in dogs, a spatial version of the DNMS task, the delayed-nonmatching-to-sample-position (DNMP), was developed (Head et al. 1995; Milgram et al. 1999). In the DNMP task, a sample stimulus is presented at one of two spatial locations. After a delay, the sample and an identical stimulus are presented to both spatial locations. To select the correct choice, the animal has to respond to the location that was not used in the sample phase. In these studies, intervals of 20, 70, and 120 s were randomly presented to the dogs that passed the 10-s acquisition criterion. The results revealed that the dogs' performance gradually deteriorated between 20 and 110 s but still remained higher than what was expected by chance for a two-position task. In this two-choice task, however, the dogs may have remembered the spatial information by using a non-mnemonic solution, such as orienting towards the target location during the interval. To refute this rival hypothesis, Chan et al. (2002) presented a three-position DNMP task to dogs. In this study, the delay was progressively increased from 10 to 150 s for the dogs that reached the 10-s learning criterion. The results showed that the maximum delay completed was 110 s and that the average memory capacity was somewhere between 50 and 60 s.
To our knowledge, only Gagnon and Doré (1993) have investigated the duration of dogs' spatial working memory mechanisms underlying the search of disappearing objects by using a VD task. In Gagnon and Doré's experiment, there were three retention intervals between encoding and searching: 3, 13, and 23 s, and the target object was equally hidden behind one of the four boxes placed in front of the animal. Results revealed that dogs could easily retrieve the target object: for each retention interval, the mean percentage of success was about 87%. This high level of performance strongly suggests that the duration of dogs' working memory for disappearing objects is longer than 23 s. Gagnon and Doré's study, however, presents a limitation: no experimental procedure was used to block the dogs' view of the hiding location during the retention delay. Therefore, it is probable that the dogs' performance was due to the opportunity to fixate on the target box during the delay. To refute this hypothesis, Gagnon and Doré videotaped all trials and measured whether the dogs visually fixated on the target box during the entire delay. Results clearly showed that the dogs did not use this kind of strategy. They interrupted their visual fixation in 96.7% of the 10-s and 20-s delay interval trials. However, the authors did not report whether the dogs looked at the target location at different times during the delay. Therefore, the possibility remains that the dogs' high performance in Gagnon and Doré's study was attributable to the opportunity for dogs to reactivate the memory trace of the target box by looking at it from time to time during the retention interval.
In the present study, two experiments were aimed at testing the duration of dogs' working memory for hidden objects by using a VD task with longer retention intervals than those used by Gagnon and Doré (1993). In experiment 1, dogs were tested at intervals of 0, 10, 30, and 60 s, and in experiment 2, they were tested with intervals of 0, 30, 60, 120, and 240 s. In both experiments, an opaque screen was introduced in front of the dog during the entire interval of time between the object's disappearance behind the target box and the dog's release. The introduction of the opaque screen in front of the dog was aimed at blocking the dog's view of the hiding location during the retention intervals and to make sure that the dog could not reactivate the memory trace of the target box during the retention interval by looking at it.
Experiment 1
Experiment 1 was aimed at testing dogs' retention capacity to memorise the location of a hidden object. The object's disappearance behind one of four boxes and the onset of subjects' searching were separated by one of four retention intervals (0, 10, 30, or 60 s). It was expected that the dogs' performance would decline gradually from 0 to 60 s.
Methods
Subjects
Subjects were 11 naive purebred adult dogs (Canis familiaris; 3 females and 8 males, mean age 1 year and 5 months, range 1–3 years) that belonged to private owners. They came from breeds classified as sporting dogs (3 Labrador retrievers, 3 golden retrievers, 1 shorthaired pointer), non-sporting dogs (1 Dalmatian, 1 standard poodle), terriers (1 Border terrier), and toys (1 Yorkshire terrier) by the American Kennel Club (AKC, 1992). It should be remembered that Gagnon and Doré (1992) showed that domestic dogs from various breeds were equally able to locate and find a hidden object in a VD task similar to the one used in the present experiment.
The dogs were selected on the basis of two criterions. Firstly, they had to be highly motivated by the opportunity to interact with the experimenters and the occasion to play with a ball or a rubber toy. Secondly, although Gagnon and Doré (1992) showed that the opportunity to smell had no effect on dogs' accuracy in a search behaviour task, the dogs had to rely on visual information to search for the target object. Dogs that seemed to rely on smell by constantly putting their muzzle on the floor surrounding the boxes and/or by intensively smelling the boxes when they searched for the target object were discarded from the study (n=2).
Apparatus
Four identical wooden boxes (16.5 cm widex29.5 cm highx11.6 cm deep with a top, a bottom, a front, and two side panels) painted white served to hide the target object. The bottom of each box was reinforced with lead bars to increase inertia. They were placed on a grey rubber carpet (210 cm widex90 cm deep). They were arrayed in a semicircle at a distance of 20 cm from each other and were equidistant (150 cm) from the dog's position. The experimenter (E1) who performed the manipulations stood 50 cm behind the carpet; another experimenter (E2), who restrained the dog during the manipulations, stood to the side of the dog. All dogs were unfamiliar to both experimenters.
The target object was either a rubber squeezable toy (several different rubber toys of various shapes and colours were used) or a tennis ball, depending on the dogs' preference. The rubber toys' height varied from 8 to 15 cm. Each object was handled by a transparent nylon thread (125 cm) tied to it. An opaque screen made of Masonite (150 cm widex156 cm high) was used in the testing phase to prevent dogs from seeing all four boxes after the object's disappearance. The opaque screen was manipulated by a plastic L-shaped handle screwed to the top edge.
The experiment was conducted in the owner's house (or garage) where a room (at least 4 m2) was selected on the basis of the dog's familiarity. In addition, the experimental setting (boxes and carpet) was placed in the middle of the room and all prominent objects (chairs, lamps, etc.) were removed from the room or were moved behind the dog's position (out of its vision). The room's (or garage's) door was closed to make sure that no noise disturbed the animal during the retention intervals and the search.
Procedure
We divided the experiment into three successive steps: shaping, training, and testing. Shaping and training were administered during the first visit, whereas testing sessions were administered on 2 separate days after the shaping and training sessions. The dog's owner was allowed to watch the manipulations from behind the dog (at least 2 m) and did not interact with the dog.
Shaping
Although the dogs were highly motivated by the opportunity to play with the target object, we introduced a food reinforcement procedure to prevent motivation from declining during the experiment. The dogs were trained to touch the target object.
In the first step of shaping, E1 simply moved the target object in front of the dog while E2 held the dog by its collar as it watched the manipulation. As soon as E1 put down the object (anywhere on the carpet but not close to the boxes), E2 released the dog. The dog was reinforced by E1 if one of the following behaviours was exhibited: grasping the object with its mouth, touching it with its paw, or putting its muzzle on it. A piece of commercial dry food (Diet NutriScience) and social rewards (strokes, verbal rewards such as "good dog!") were used as reinforcements. One highly motivated dog was rewarded only with social reinforcements. When the dog had touched the object in 5 successive trials, the target object was gradually positioned closer to the boxes as the dog succeeded. Finally, the object was placed between two of the four boxes but not behind them. The shaping phase was completed when the subject had touched the target object located between two boxes in 10 consecutive trials. The dogs needed a mean number of 21.27 trials (SD=2.41) to complete the shaping phase and all dogs reached the last criterion in 10 trials.
Training
Five minutes after the end of shaping, the dogs were submitted to a training phase where they learned to find the target object in each of the four positions on the carpet. Through this procedure, the dogs learned that each position and each box had an equal probability of being a hiding location.
At the beginning of a training trial, E1 put down the target object in front of the two central boxes while E2 restrained the animal by grasping its collar. With the help of the nylon thread tied to the target object, E1 lifted the object, captured the dog's attention, moved the object visibly in front of each of the four boxes, and finally hid the object behind the target box. When the target box was located to the dog's right, E1 moved the object from left to right, and when the target box was located to its left, E1 moved the object from right to left. If the dog did not watch the movement throughout the entire sequence, the trial was interrupted and repeated. Because the dogs were highly motivated to search for the target object, repeated trials rarely occurred. Once the object had disappeared, E1, to prevent cueing, looked at E2. Then, E2 introduced the opaque screen in front of the dog, immediately removed it, and released the dog. The purpose of this manoeuvre was to habituate the dogs to the manipulation of the opaque screen that was used later in testing. If the dog made no search attempt during the minute that followed its release (no choice), it was called back by E2 for the beginning of the next trial. If the dog found the object behind the target box and touched it (success), it was reinforced. However, if the dog chose a non-target box (error), the trial was immediately interrupted, and the dog was not allowed to search for the object behind a second box.
Within a training session, the target object was hidden six times behind each of the four boxes for a total of 24 training trials. In addition, the hiding location (target box) changed from trial to trial so that the target object was never hidden at the same spatial location on two consecutive trials and each trial was separated by a short intertrial interval of 30 s. Training ended when the dog reached a criterion of 80% (20 out of 24 trials) during one training session. If the dog failed to reach the criterion, additional training sessions were administered over the next few days. All dogs took one session to reach the criterion and they maintained a mean percentage of success of 89.8% (SD=7.06). There was no training trial without a search attempt. This high level of performance indicates that dogs' search behaviour for a hidden object is spontaneous and does not require specific training.
Testing
Testing began the day following the end of training. Each testing session began following three warm-up trials, which were identical to those of the last phase of shaping. On each testing trial, E1 hid the target object behind one of the four boxes, as was done during training. Then, the opaque screen was introduced by E2 in front of the dog for 0, 10, 30, or 60 s. At the end of the retention interval, E2 removed the opaque screen and released the dog. To prevent cueing, E1 looked at E2 during the dog's searching behaviour.
The object was hidden three times behind each of the four boxes for each of the four retention intervals, for a total of 48 trials that were distributed over two sessions. The sessions were counterbalanced among dogs and were administered on 2 consecutive days. To avoid the negative effect that a succession of long intervals might have on the performance in trials with short retention intervals (Fletcher 1965), trials were assigned semi-randomly to the two sessions: the four retention intervals (0, 10, 30, and 60 s) were randomly distributed in a block of four trials. As a result, there were six blocks of trials within a session, and no trial with a given interval was followed by a trial with the same interval. In addition, the hiding location (target box) changed from trial to trial so that the target object was never hidden at the same spatial location on two consecutive trials. Finally, a 30-s intertrial interval was introduced between each testing trial.
Results and discussion
For all statistical analyses, a criterion of P<0.05 was used for rejection of the null hypothesis. In all experiments, the percentage of success expected by chance was 25%. If the dogs searched randomly, they should have searched equally often behind each of the four boxes. In the 528 testing trials, there were none without a search attempt.
Percentage of success
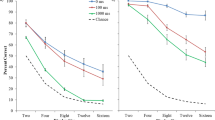
Figure 1 shows the mean percentage of success as a function of the length of the retention interval in testing. The dogs' performance declined as a function of interval as indicated by a within-subject analysis of variance (ANOVA) on the percentage of success, F (3,15)=7.63, P=0.003. An a posteriori Newman–Keuls test revealed that the dogs' performance was stable between 0-s and 10-s intervals. It also showed that these mean percentages of success were significantly higher than those observed at 30-s and 60-s intervals, which did not differ. Finally, a series of one-sample t tests revealed that the dogs' mean percentage of success was greater than what would be expected by chance for each retention interval, t (10)=14.34, 12.60, 5.97, and 5.52, respectively. Therefore, the analysis of success reveals that the dogs' performance of locating a hidden object was very high with short retention intervals and remained above chance with delays up to 60 s.

Mean percentage of successful trials as a function of the retention interval in experiment 1
Analysis of errors
To determine why the dogs' performance declined as a function of the length of the delay, we examined the possibility that dogs may have been subject to intertrial proactive interference. Proactive interference was inferred whenever the spatial information used by the dogs prior to the current trial interfered with their capability to retain the spatial information of the target location (Hampton et al. 1998). Some studies (Edhouse and White 1988; Grant 1981; Roberts 1980) revealed that intertrial proactive interference is most likely to occur when trials of different intervals are successively presented within the same testing session and when the intertrial interval is short. The present experiment met these two conditions because the four different retention intervals were randomly presented within the same testing session and each trial was separated by a short intertrial interval of 30 s. Therefore, in the present experiment, intertrial proactive interference was inferred whenever subjects returned to the spatial position they visited prior to the current trial.
For the statistical analysis, the number of search attempts made at the location visited prior to the current trial was expressed as a percentage of the total number of errors. A non-significant within-subject ANOVA, F (3,15)=2.76, P=0.078, revealed that the percentages of search attempts made at the location visited prior to the current trial were stable for each interval [note that some data were eliminated from the analysis because some dogs (n=4) did not make any errors during test trials of 0 and/or 10 s]. Because the number of search attempts made at the location visited prior to the target trial did not differ from one interval to another, they were pooled (see Table 1). We used a binomial test (P=0.25) to determine whether the number of search attempts made at the spatial location visited prior to the current trial, expressed as the total number of errors committed by each dog, differed significantly from the number of search attempts expected by chance. As one can see, only 2 of 11 dogs searched above chance level at the location they visited prior to the current trial. Overall, it appears that the dogs did not use the spatial information used during the prior trial and were not subject to intertrial proactive interference.
If the dogs' decrease of performance was due to memory difficulties, the search attempts distribution should be as a function of the proximity to the target box. According to Bjork and Cummings (1984), if an organism presents a memory limitation during an object permanence task, whenever it commits an error, it should search for the object near the true hiding location. To test this hypothesis, the percentages of search attempts made at each non-target box were compared to searches at the target box as a function of their proximity. Proximity was analysed according to two spatial configurations of the boxes. Firstly, the target box was either on the far right or on the far left of the row of boxes (six trials for each interval). With this spatial configuration, there was a first (1st), a second (2nd), and a third (3rd) adjacent non-target box relative to the target box. Secondly, the target box was either the second box in from the far left or the far right of the row of boxes (six trials for each interval). With this spatial configuration, there was one non-target box (1st-1) on one side of the target box and two nonadjacent boxes (1st-2 and 2nd-2) on the other side. Given the small number of trials (n=6) for each interval in both types of spatial configuration of the boxes, it was statistically hazardous to evaluate the distribution of the percentages of search attempts behind the non-target boxes as a function of the retention intervals. Consequently, the percentages of search attempts made behind each non-target box were pooled for each interval. In addition, because the distribution of the percentages of search attempts made behind each of the three non-target boxes was not independent, a non-parametric Friedman two-way ANOVA by ranks was used. Therefore, the percentages of search attempts made behind each of the three non-target boxes were transformed by ranks from 1 to 3 for each dog. Rank 1 was given to the lowest percentage and rank 3 was given to the highest percentage. Then, significant Fr values were followed by a series of multiple comparisons performed on the difference between the rank sums (see Siegel and Castellan 1988). A first Friedman two-way ANOVA by ranks revealed a significant effect of the proximity to the target box, Fr(2)=17.90, P=0.0001. Multiple comparisons tests showed that the dogs searched more frequently at the 1st non-target box (mean rank=3.00) than at the 2nd non-target box (mean rank=1.59), which was visited more frequently than the 3rd adjacent box (mean rank=1.41). A second within-subjects ANOVA indicated a significant effect of the proximity to the target box, Fr(2)=15.59, P=0.0001. Multiple comparisons tests revealed that the search attempts made at the 1st-1 non-target box (mean rank=2.36) and at the 1st-2 non-target box (mean rank=2.55) did not differ but were more frequent than the search attempts made at the 2nd-2 non-target box relative to the target box (mean rank=1.13). Put together, these results reveal that when the dogs committed an error, they searched as a function of the proximity to the target box. This suggests that the dogs' errors were due to difficulties in remembering the exact spatial position of the hiding location.
In summary, experiment 1 indicates that dogs' working memory for a hidden object declines after 30 s but still remains above chance at 60 s. In addition, the analysis of errors indicates that whenever the dogs committed errors, they searched as a function of the proximity to the hiding location and were not subject to intertrial proactive interference.
Experiment 2
Experiment 2 was aimed at testing the duration of dogs' working memory with longer retention intervals than those used in experiment 1 because in the first experiment, dogs still performed well above chance after 60 s of retention. The procedure used in experiment 2 was identical to that used in experiment 1 except that the retention intervals were of 0, 30, 60, 120, and 240 s. We hypothesised that the dogs' performance would decrease as a function of the intervals and would be at chance with the longer retention intervals.
Methods
Subjects
Subjects were eight naive purebred adult dogs (Canis familiaris; two females and six males, mean age 1 year and 10 months, range 1–4 years) that belonged to private owners. They came from breeds classified as sporting dogs (four Labrador retrievers), toys (one Yorkshire terrier, one Pomerarian), working dogs (one Giant Schnauzer), and herding dogs (one German shepherd) by the AKC(1992).
Apparatus and procedure
The apparatus and general procedure were exactly the same as in experiment 1 except that the following five retention intervals were used: 0, 30, 60, 120, and 240 s. The object was hidden three times behind each box for each of the five retention intervals, for a total of 60 trials that were distributed over 3 daily sessions of 20 trials. The sessions were counterbalanced among dogs. As in experiment 1, no trial with a given interval was followed by a trial with the same interval and the target location changed from trial to trial.
Results and discussion
The dogs needed a mean number of 21.55 trials (SD=3.56) to complete the shaping phase and all dogs learned to touch the object placed between two boxes in 10 trials. In the training phase, all dogs took one session to reach the criterion and they maintained a mean percentage of success of 90.10% (SD=6.66).
Percentage of success
Figure 2 illustrates the mean percentage of success as a function of the five retention intervals. The dogs' performance decreased as a function of the length of interval as indicated by a within-subject ANOVA on the percentage of success, F (4,28)=8.28, P=0.0002. An a posteriori Newman–Keuls test revealed that the dogs' accuracy was significantly higher at 0-s and 30-s intervals (which did not differ) than at 60-s, 120-s, and 240-s intervals, which did not differ. Finally, a series of one-sample t tests revealed that the dogs' mean percentage of success was better than chance for each retention interval, t (5)=15.78 (0 s), 7.04 (30 s), 4.73 (60 s), 3.73 (120 s), and 4.71 (240 s).

Mean percentage of successful trials as a function of the retention interval in experiment 2
Analysis of errors
As in experiment 1, we examined the possibility that the dogs' decline in performance as a function of the length of the delay was due to intertrial proactive interference. A non-significant within-subject ANOVA, F (4,8)=0.318, P=0.858, showed that the percentage of search attempts made at the location visited prior to the current trial, expressed as a percentage of the total number of errors, was stable for each interval [note that some data were eliminated from the analysis because many dogs (n=5) did not made any errors during test trials of 0 and/or 30 s]. Because the percentages of search attempts made at the location visited prior to the target trial did not differ from one interval to another, they were pooled (see Table 2). We used a binomial test (P=0.25) to determine whether the number of search attempts made at the spatial location visited prior to the current trial, expressed as the total number of errors committed by each dog, differed significantly from the number of search attempts expected by chance. As one can see, only two of eight dogs searched above chance level at the location they visited prior to the current trial. Therefore, it appears that the dogs did not use the spatial information that was used during the prior trial and were not prone to intertrial proactive interference.
As in experiment 1, we tested the hypothesis that the dogs' decrease in performance was due to memory difficulties. The percentages of search attempts made at each non-target box were compared as a function of their proximity to the target box for both types of spatial configuration of the non-target boxes (as described in experiment 1). As in experiment 1, data were pooled and transformed by ranks and non-parametric analyses were used. A first non-parametric Friedman two-way ANOVA by ranks revealed a significant effect of the proximity of the target box, Fr(2)=13.04, P=0.001. Multiple comparisons tests showed that the dogs searched more frequently at the 1st non-target box (mean rank=2.88) than at the 2nd (mean rank=1.81) and 3rd non target boxes (mean rank=1.31), which did not differ. A second Friedman two-way ANOVA by ranks indicated a significant effect of the proximity to the target box, Fr(2)=9,484, P=0.009. Multiple comparisons tests revealed that the search attempts made at the 1st-1 non-target box (mean rank=2.44) and at the 2nd-2 non-target box (mean rank=2.44) did not differ but were more frequent than the search attempts made at the 2nd-2 non-target box in relation to the target box (mean rank=1.13).The present analyses reveal that when the dogs committed an error, they searched as a function of the proximity to the target box. This clearly suggests that the dogs' errors were the result of spatial memory difficulties in remembering the exact position of the hidden object.
In summary, experiment 2 reveals that dogs' working memory for hidden objects is very good until 30 s, but it deteriorates with longer retention intervals, although it was still above chance even after a 240-s retention interval. The results of experiment 2 also supports those from experiment 1 because when the dogs committed errors, they had a strong tendency to search near the hiding location and were not prone to intertrial proactive interference.
General discussion
In the experiments reported here, the limits of working memory for disappearing objects in an object permanence task were investigated in domestic dogs. Overall, the dogs' performance was very high in the shorter delays and it gradually declined somewhere between 10 and 60 s, where it remained stable and above chance for delays of up to 240 s.
First, it appears that the presence of an opaque screen obscuring the target location from the dogs' sight during the entire delay did not disrupt the dogs' performance in the shorter delays. Our results are highly comparable to those obtained by Gagnon and Doré (1993); in their study the dogs had visual access to the location where the object was hidden during the entire delay. However, the introduction of the opaque screen in the VD task may have influenced the dogs' performance in the longer delays. Indeed, in a DR task, Vallortigara et al. (1998) demonstrated that domestic chicks' performance in finding an imprinting object was better in longer delays when the chicks had visual access to the hiding location than when they did not. A similar effect has also been reported in primates (for a review, see Fletcher 1965). Therefore, it is possible that in the present experiments, the introduction of the opaque screen in front of the animal during the delay explains why the dogs' performance dropped after a relatively short retention interval. This may also explain why Hunter (1913) found that in a DR problem, dogs were able to remember a target location even after a retention interval of 300 s. In the DR problem used by Hunter, no opaque screen obscured the dogs' view and the sight of the boxes during the entire delay could have been used by the dogs to rehearse the target location. To confirm this last hypothesis, another study should compare dogs' ability to find a hidden object in a search task in which dogs do and do not have visual access to the target location during the entire delay.
In the present experiments, one could propose that the dogs' performance in the longer delays, which was well above chance level, was due to an alternative non-mnemonic strategy, that is, a body or head orientation strategy (see Hunter 1913; Walton 1915; Yarbrough 1917). If the dogs had been using such a non-mnemonic strategy during the retention interval, they would have oriented their head or body in the direction of the hiding location during the entire delay. Although we were aware of this possibility when we designed the experiments, we did not register the dogs' body or head orientation during the delay. Data gathered by previous experiments in our laboratory motivated this decision. Fiset et al. (2000) have systematically videotaped dogs' head and body position during an object permanence task similar to the one used in the present study. Their results demonstrated that dogs do not orient their body or their head towards the target hiding location during a 10-s retention interval. In fact, dogs moved their body and their head from right to left and vice versa during the entire retention interval. It should be noted, however, that in Fiset et al. (2000), the retention interval was shorter (10 s) than some delays used in the present experiments and one could argue that a body or head orientation strategy would emerge after a longer retention interval. However, although we did not systematically register the dogs' head and body orientation, in the longer retention intervals of the present experiments, we did observe the same head and body movements in dogs as those noted and reported by Fiset et al. (2000). The same behaviours were also reported by Vallortigara et al. (1998) in a DR task in the domestic chick with delays up to 180 s. In addition, given the presence of an opaque and uniform barrier (the screen) in front of the dogs during the entire delay, we do not see how the dogs could have relied on a body orientation strategy in longer delays if they did not maintain this strategy during the first seconds following the object's disappearance. The dogs would not have visual access to the target location to reorient themselves towards the appropriate direction. Consequently, we are confident that the dogs did not use a non-mnemonic strategy such as a body or head orientation to locate the hidden object. Therefore, the most likely explanation remains that dogs encode and maintain an active representation of the hiding location in working memory during the retention intervals. This conclusion is also supported by the analysis of errors showing that dogs searched as a function of the proximity to the hiding location. The distribution of errors in search behaviour near the hiding location suggests that the dogs did remember an approximation of the spatial position of the target location but forgot the exact position (Bjork and Cummings 1984).
The decrease in the dogs' performance as a function of the retention intervals is in accordance with recent studies that used a spatial version of the DNMS task to investigate dogs' spatial working memory (see Chan et al. 2002; Head et al. 1995; Milgram et al. 1994, 1999). This supports the hypothesis that dogs do rely on a mental representation to memorise the spatial information of the target hiding location. This suggests that the strength of the memory trace of the hiding location decreased gradually in the dogs' working memory in the minute following the object's disappearance behind the target location. However, how dogs maintain the spatial information about the hiding location in working memory for a relatively long period of time (240 s) is still unknown. One possibility is that dogs might use a form of rehearsal to keep the hiding location active in memory. However, our experiments did not provide any cues about this possibility and for the moment, this remains purely speculative.
In future research, dogs' memory for hidden objects should be tested in situations in which they would have to retrieve a target object that had been hidden by them in the environment. Indeed, in recent years, pseudo-scientific literature about dogs has reported anecdotal tales suggesting that several breeds of dogs are able to cache "precious objects" (such as bones) at different locations in their immediate environment and retrieve them hours or days later. However, no one has yet seriously investigated this behaviour. Numerous studies have already demonstrated the presence of amazing memory capabilities in different species of food-storing birds. For example, the Clark's nutcracker (Nucifraga columbiana) locates thousands of buried seeds for up to 11 months (for a summary of these studies, see Balda and Kamil 1998). Maybe dogs demonstrate, on a different level than the food-storing birds, specialised memory mechanisms for locating an object hidden by themselves rather than by someone else.
In summary, our research supports the value of the Piagetian framework used by researchers to study cognitive abilities of diverse species (Pepperberg 2002) and extends this approach to the study of the memory mechanisms underlying the search for disappearing objects in animals. More specifically, our study shows that a visible displacement task, coupled with the introduction of an opaque screen in front of the animal during the entire delay, may be helpful in investigating the length of time that animals can retain the spatial position of a disappearing object in the environment. Consequently, more studies are called for investigating the duration of working memory for hidden objects in animal species that have already demonstrated the ability to spontaneously locate disappearing objects.
References
American Kennel Club (1992) The complete dog book, 18th edn. Howell Book House, New York
Balda RP, Kamil AC (1998) The ecology and evolution of spatial memory in corvids of the southwestern USA: the perplexing pinyon jay. In Balda RP, Pepperberg IM, Kamil AC (eds) Animal cognition in nature: the convergence of psychology and biology in laboratory and field. Academic Press, Toronto, pp 29–64
Bjork EL, Cummings EM (1984) Infant search errors: stage of concept development or stage of memory development. Mem Cogn 12:1–19
Call J (2001) Object permanence in orangutans (Pongo pygmaeus), chimpanzees (Pan troglodytes), and children (Homo sapiens). J Comp Psychol 115:159–171
Chan ADF, Nippak PMD, Murphey H, Ikeda-Douglas CJ, Muggenburg B, Head E, Cotman CW, Milgram NW (2002) Visuospatial impairments in aged canines (Canis familiaris): the role of cognitive-behavioral flexibility. Behav Neurosci 116:443–454
De Blois ST, Novak MA (1994) Object permanence in rhesus monkeys (Macaca mulatta). J Comp Psychol 108:318–327
De Blois ST, Novak MA, Bond M (1998) Object permanence in orangutans (Pongo pygmaeus) and squirrel monkeys (Saimiri sciurus). J Comp Psychol 112:137–152
De Blois ST, Novak MA, Bond M (1999) Can memory requirements account for species' differences in invisible displacement tasks? J Exp Psychol Anim Behav 25:168–176
Doré FY (1986) Object permanence in adult cats (Felis catus). J Comp Psychol 100:340–347
Doré FY (1990) Search behavior of cats (Felis catus) in an invisible displacement test: cognition and experience. Can J Psychol 44:359–370
Doré FY, Dumas C (1987) Psychology of animal cognition: Piagetian studies. Psychol Bull 102:219–233
Doré FY, Goulet S (1998) The comparative analysis of object knowledge. In: Langer J, Killen M (eds) Piaget, evolution, and development. Erlbaum, Mahwah, N.J., pp 55–72
Doré FY, Fiset S, Goulet S, Dumas M-C, Gagnon S (1996) Search behavior in cats and dogs: interspecific differences in working memory and spatial cognition. Anim Learn Behav 24:142–149
Dumas C, Doré FY (1989) Cognitive development of kittens: a cross-sectional study of object permanence. J Comp Psychol 103:191–200
Dumas C, Doré FY (1991) Cognitive development in kittens (Felis catus): an observational study of object permanence and sensorimotor intelligence. J Comp Psychol 105:357–365
Edhouse WV, White KG (1988) Sources of proactive interference in animal memory. J Exp Psychol Anim Behav 14:56–70
Étienne AS (1973) Developmental stages and cognitive structures as determinants of what is learned. In: Hinde RA, Stevenson-Hinde J (eds) Constraints on learning: limitations and predispositions. Academic Press, New York, pp 317–395
Étienne AS (1984) The meaning of object concept at different zoological levels. Hum Dev 27:309–320
Fiset S, Doré FY (1996) Spatial encoding in domestic cats (Felis catus). J Exp Psychol Anim Behav 22:420–437
Fiset S, Gagnon S, Beaulieu C (2000) Spatial encoding of hidden objects in dogs (Canis familiaris). J Comp Psychol 114:315–324
Fletcher HJ (1965) The delayed response problem. In: Schrier AM, Harlow HF, Stollnitz F (eds) Behavior of nonhuman primates, vol 1. Academic Press, New York, pp 129–165
Funk MS (1996) Development of object permanence in the New Zealand parakeet (Cyanoramphus auriceps). Anim Learn Behav 24:375–384
Gagnon S, Doré FY (1992) Search behavior in various breeds of adult dogs (Canis familiaris): object permanence and olfactory cues. J Comp Psychol 106:58–68
Gagnon S, Doré FY (1993) Search behavior of dogs (Canis familiaris) in invisible displacement problems. Anim Learn Behav 21:246–254
Gagnon S, Doré FY (1994) Cross-sectional study of object permanence in domestic puppies (Canis familiaris). J Comp Psychol 108:220–232
Goulet S, Doré FY, Rousseau R (1994) Object permanence and working memory in cats (Felis catus). J Exp Psychol Anim Behav 20:347–365
Goulet S, Doré FY, Lehotkay R (1996) Activation of locations in working memory in cats. Q J Exp Psychol B 49:81–92
Grant DS (1981) Intertrial interference in rat short-term memory. J Exp Psychol Anim Behav 7:217–227
Gruber HE, Girgus JS, Banuazizi A (1971) The development of object permanence in the cat. Dev Psychol 4:9–15
Hampton RR, Shettleworth SJ, Westwood RP (1998) Proactive interference, recency, and associative strength: comparisons of black-capped chickadees and dark-eyes juncos. Anim Learn Behav 26:475–485
Head E, Mehta R, Hartley J, Kameka M, Cummings BJ, Cotman CW, Ruehl WW, Milgram NW (1995) Spatial learning and memory as a function of age in the dog. Behav Neurosci 109:851–858
Hunter WS (1913) The delayed reaction in animals and children. Behav Monogr 2(6)
Kowalska DM (1995) Effects of hippocampal lesions on spatial delayed responses in dog. Hippocampus 5:363–370
Kowalska DM (2000) Cognitive functions of the temporal lobe in the dog: a review. Prog Neuropsychopharmacol Biol Psychiatry 24:855–880
Mathieu M, Bouchard MA, Granger L, Herscovitch J (1976) Piagetian object permanence in Cebus capucinus, Lagothrica flavicauda and Pan troglodytes. Anim Behav 24:585–588
Milgram NW, Head E, Weiner E, Thomas E (1994) Cognitive functions and aging in the dog: acquisition of nonspatial visual tasks. Behav Neurosci 108:57–68
Milgram NW, Adams B, Callahan H, Head E, Mackay B, Thirlwell C, Cotman CW (1999) Landmark discrimination learning in the dog. Learn Mem 6:54–61
Natale F, Antinucci F, Spinozzi G, Poti P (1986) Stage 6 object concept in nonhuman primate cognition: a comparison between gorilla (Gorilla gorilla gorilla) and Japanese macaque (Macaca fuscata). J Comp Psychol 100:335–339
Parker ST (1977) Piaget's sensorimotor series in an infant macaque: a model for comparative unstereotyped behavior and intelligence in human and nonhuman primates. In: Chevalier-Skolnikoff S, Poirier FE (eds) Primate bio-social development: biological, social, and ecological determinants. Garland, New York, pp 43–112
Pepperberg IM (2002) The value of the Piagetian framework for comparative cognitive studies. Anim Cogn 5:177–182
Pepperberg IM, Funk MS (1990) Object permanence in four species of psittacine birds: an African grey parrot (Psittacus erithacus), an Illiger mini macaw (Ara Maracana), a parakeet (Melopsittacus undulatus), and a cockatiel (Nymphicus hollandicus). Anim Learn Behav 18:97–108
Pepperberg IM, Kozak FA (1986) Object permanence in the African grey parrot (Psittacus erithacus). Anim Learn Behav 14:322–330
Piaget J (1967) La construction du réel chez l'enfant. (The construction of reality in the child) Delachaux et Niestlé, Neufchâtel, Switzerland (Original work published 1937)
Redshaw M (1978) Cognitive development in human and gorilla infants. J Hum Evol 7:133–141
Roberts WA (1980) Distribution of trials and intertrial retention in delayed matching to sample with pigeons. J Exp Psychol Anim Behav 6:217–237
Siegal S, Castellan NJ (1988) Nonparametric statistics for behavioral sciences, 2nd edn. McGraw-Hill, New York
Thinus-Blanc C, Poucet B, Chapuis N (1982) Object permanence in cats: analysis in locomotor space. Behav Process 7:81–87
Triana E, Pasnak R (1981) Object permanence in cats and dogs. Anim Learn Behav 9:135–139
Yarbrough JU (1917) The delayed reaction with sound and light in cats. J Anim Behav 7:87–110
Vallortigara G, Regolin L, Rigoni M, Zanforlin M (1998) Delayed search for a concealed imprinted object in the domestic chick. Anim Cogn 1:17–24
Walton AC (1915) The influence of diverting stimuli during delayed reaction in dogs. J Anim Behav 5:259–291
Wood S, Moriarty KM, Gardner BT, Gardner RA (1980) Object permanence in child and chimpanzee. Anim Learn Behav 8:3–9
Acknowledgements
This research was supported by an operating research grant from the Natural Sciences and Engineering Research Council of Canada (NSERC) and by a research grant from the Faculté des Études Supérieures et de la Recherche (FESR) of Université de Moncton. The experiments received approval from the Comité de protection des animaux from the Faculté des études supérieures et de la recherche de l'Université de Moncton, which is responsible for the application and enforcement of rules of the Canadian Council on Animal Care. We thank the dogs' owners who participated in these experiments.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Fiset, S., Beaulieu, C. & Landry, F. Duration of dogs' (Canis familiaris) working memory in search for disappearing objects. Anim Cogn 6, 1–10 (2003). https://doi.org/10.1007/s10071-002-0157-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10071-002-0157-4