
Abstract
Particle morphology is an essential characteristic that plays a crucial role in determining the mechanical responses of granular materials. A series of discrete element method (DEM) simulations of a mini-triaxial test were conducted, focusing on the shear behaviours of granular material. To mimic the physical testing situation, DEM simulations were combined with micro-computed tomography, and image processing techniques and spherical harmonics analysis were utilised to reconstruct realistic particle morphology. The multisphere clump method and flexible-membrane technique were used to simulate three types of sand and allow flexible deformation in the radial direction. The numerical results show that the grains inside the shear band rotate more freely and exhibit obvious fabric anisotropy. The shear behaviours are strongly associated with the shape of the component particles. Specifically, with the increase in shape irregularity, the stiffness and peak deviatoric stress increase, and a more obvious dilation is observed during shearing. In addition, with particles ranging from regular to angular, less particle rotation and more intense fabric anisotropy occur. The numerical investigations highlight the significant role of particle morphology in the shear behaviours of granular materials.
Graphical abstract

Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Particle morphology is an inherent soil characteristic that is extremely important for understanding the mechanical responses of granular materials (e.g., [7, 15]). Numerous experimental results have shown that the morphological features of particles significantly affect the mechanical behaviours of natural sands, including shear strength, crushability, and critical state behaviour (e.g., [11, 27, 34, 35]). For instance, Santamarina and Cho [22] found that three descriptors—angularity, sphericity, and roughness—can be used to characterise and quantify the particle shape and influence the development of stress-induced anisotropy. Roughness and angularity decrease the small-strain stiffness but increase the high-strain strength. Wu et al. [31] investigated the effect of roundness on biaxial shearing sands and discovered that the roundness affects the particle kinematics. Specifically, a decrease in roundness results in less particle rotation and higher deviatoric stress and stronger dilation in the volumetric change.
For the acquisition of three-dimensional (3D) particle morphology, the micro-computed tomography (μCT) technology has been applied in geotechnical engineering (e.g., [1, 13]). X-ray μCT can be used to study and quantify the influencing factors (e.g., particle shape, heterogeneity, and mineralogy) of the particle fracture pattern during one-dimensional (1D) compression tests (e.g., [15]). This technique can also be used to conduct particle tracking for the investigation of particle kinematics in deformed sands (e.g., [3, 36]). For the investigation of cemented materials, it is useful in practice to use X-ray μCT to track crack development under different levels of freeze–thaw damage [23].
X-ray μCT facilitates the use of the discrete element method (DEM) in the simulation of realistic granular materials (e.g., [16, 32]). The irregularly shaped sand particles obtained from X-ray μCT can be characterised by ball or clump features and imported into the DEM model. For instance, the authors recently conducted a sophisticated DEM study to reproduce the triaxial shearing behaviour of a mini-specimen by accurately reproducing the particle morphology of every sand particle acquired from μCT [32]. Based on that work, the authors went on to present a novel statistical fragmentation scheme for modelling the continuous breakage process of granular materials under external loading [33]. The key feature of the statistical fragmentation scheme is the incorporation of X-ray μCT data of sand particle breakage within a mini-specimen subject to 1D compression into the DEM modelling of such a process using a statistical method. The proposed method contributes to solving scientific and engineering problems occurred at high-stress levels and can be used in a variety of applications, such as powder metallurgy, mining, and petroleum engineering, etc.
In the previous study, the macroscopic (e.g., volumetric response, deviatoric stress response, and stiffness) and particle level (e.g., branch vector orientation, rotation, and displacement) responses acquired from the proposed modelling approach were very similar to what occurs within the physical experiments, validating the conducted DEM method [32]. In this paper, a further step was taken to explore the effect of particle shape on the shear behaviour of granular materials. First, the sand particle morphology was determined using X-ray μCT. Then, spherical harmonic (SH) analysis was used to reconstruct the irregularly shaped particles and import them into the DEM simulations. After that, the sand particles were divided into three groups based on the calculated shear strain. For each group, the particle kinematics, contact behaviour, and distribution of porosity were investigated. Finally, the effect of particle shape on the shear behaviour of natural sands was examined.
2 Methodology
2.1 Image processing of μCT data
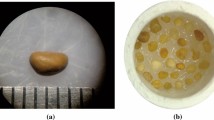
For visualising 3D granular microstructures, μCT imaging has proved to be a powerful and efficient approach [32, 37]. In this study, Leighton Buzzard sand (LBS) particles, with a relatively rounded and smooth shape, were employed as the test specimen. To acquire the morphological features of the particles, a μCT apparatus with a high spatial resolution of 6.5 μm setup at the Shanghai Synchrotron Radiation Facility (SSRF) was utilised. The detector is 12.66 mm in width and 4.888 mm in height. The beam energy is set to 25 keV. More in-depth details about the apparatus can be found in Cheng and Wang [6].
After the acquisition of the μCT data, a series of image processing techniques were applied to the raw images (Fig. 1a) before reconstructing the particle surface. First, a filtering algorithm named ‘3D median filter’ [30], which is known for its outstanding capability of noise and blurring reduction, was applied to the raw images. The diagram of the image before and after filtering (Fig. 1d) illustrates that filtering significantly diminishes the intra-class variances, facilitating the implementation of thresholding. Second, Otsu thresholding [20] was performed to separate the different phases and further minimise the intra-class variances. The processing results after filtering and thresholding are shown in Figs. 1b and c, respectively. As shown in Fig. 1c, the edge of the particle is considerably smooth after a few steps of image processing.

Image processing: a raw image; b image after 3D median filter; c image after the threshold; d histogram before and after filtering
2.2 SH analysis
SH analysis was introduced in this study to characterise and reconstruct particle morphology. By performing spherical parameterisation, a set of surface points \({\varvec{V}}\left(\theta ,\varphi \right)\)—see Eq. (1)—was obtained, in which \(\theta \in [0,\pi ]\) are the polar angles and \(\varphi \in [\mathrm{0,2}\pi ]\) are the azimuthal angles.
Next, SH analysis was implemented to expand the polar radius of the particle profile from a unit sphere:
where \({{\varvec{c}}}_{n}^{m}\) represents the SH coefficient, and \({Y}_{n}^{m}\) refers to the SH function defined by Eq. (3).
where \({P}_{n}^{m}\) is the associated Legendre function given by Eq. (4).
where \(n\) and \(m\) represent the degree and order, respectively, and \({p}_{n}\left(x\right)\) is given as:
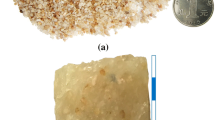
The total number of one set of \({{\varvec{c}}}_{n}^{m}\) is \({\left(n+1\right)}^{2}\); thus, \({\left(n+1\right)}^{2}\) unknown coefficients must be determined by combining Eqs. (3)–(5) with Eq. (2). Previous studies have concluded that \({n}_{max}=15\) is precise enough for most engineering practices [12], and the particle surface area and volume reach stable values when \(n\) is greater than \({n}_{max}\) [36, 37]. More information about SH analysis can be found in Zhou et al. [37]. Figure 2 shows that the reconstruction of the particle becomes closer to the actual particle morphology with increasing degree \(n\) of the SH function. For \(n=3\), the particle surface was fairly round and smooth, whereas, for \(n=15\), the reconstruction was sufficient to capture most of the features (i.e., texture and irregularity) of the particle surface. Therefore, the maximum SH degree is set to 15 in this paper.

SH reconstruction of particle micromorphology with different SH degrees n: a image view; b at n = 3; c at n = 6; d at n = 8 and e at n = 15
2.3 Particle shape quantification
In this study, particle shape was quantified by three indices: aspect ratio (AR), area sphericity (Sa), and convexity (C). The AR of a particle is defined as the ratio of the maximum Feret diameter (\({D}^{Fmax}\)) to the minimum Feret diameter (\({D}^{Fmin}\)), as shown in Fig. 3a [21]. The area sphericity is the ratio of the projected area (\({A}_{f}\)) over the area of the minimum circumscribing circle (\({A}_{cir}\)), as shown in Fig. 3b [26]. The convex hull, as depicted in Fig. 3c, is the ratio between the area of the component (\({A}_{f}\)) and the area of the convex hull (\({A}_{f}+B\)), in which the convex hull is defined as the minimal convex surface enclosing the component.

Schematic illustration of definitions for shape parameters: a aspect ratio; b area sphericity; c convexity
The cumulative distribution curves of these shape parameters are shown in Fig. 4. The curves of the AR of the two types of grain are similar to each other. However, it is evident that the median values of the sphericity and convexity of the SH: 15 particles are much smaller than those of the SH: 3 particles. This indicates that the morphological features of SH: 15 particles are more complex and closer to realistic particle surfaces. In contrast, SH: 3 particles are seen to be relatively round and idealistic.

Cumulative distribution curves of shape parameters of tested materials
2.4 DEM simulation
The commercial DEM code PFC3D v.6.0 (particle flow code in three dimensions) was utilised to perform the simulations of mini-triaxial tests and investigate the shear behaviours from macro-scale and particle-scale perspectives [14]. The DEM model setup procedure is as follows. First, the morphology information of the particles reconstructed using SH analysis was imported into PFC3D. Second, a rigid wall and two end platens were constructed in the model to enclose the specimen, and a radial confining stress of 300 kPa was applied to it. Subsequently, the rigid wall was substituted with a flexible membrane to make free deformation of the specimen possible under axial compression. Finally, the bottom and top end platens moved towards each other at a constant strain rate of 0.2% per minute until the axial strain reached 15%. The input micro-parameters are listed in Table 1.
In the simulations, the overlapping multisphere clump method [10] and an efficient PFC3D built-in algorithm named the ‘bubble packing algorithm’ [24] were employed to characterise the particle morphology (Fig. 5). This algorithm is mainly controlled by \(\varphi \in (0^\circ ,180^\circ )\) and \(\rho \in (\mathrm{0,1})\), where \(\rho\) is the ratio of the smallest to largest sphere radius, and \(\varphi\) refers to an angular measure of smoothness. Following the previous findings by the authors, \(\varphi\) and \(\rho\) were set to 150∘ and 0.3, respectively, to reach a balance between computational efficiency and representation accuracy of particle morphology [32].

adapted from [24])
Relationship between the distance d and the circle intersection angle, φ (the top diagram). The middle and bottom diagrams illustrate the case of φ = 180°, which corresponds to a smooth (least rough) and φ = 0°, which represents the roughest transition (
The flexible membrane used in this model replaces the traditional rigid wall and thus makes the simulations more in line with actual triaxial experiments in terms of the boundary conditions. The flexible membrane was numerically generated using a set of homogeneous and frictionless spheres connected by solid but flexible bonds in a hexagonal packing geometry (e.g., [8, 9, 32]). The top and bottom layer particles of the membrane are fixed to avoid detaching, while other particles are set to be flexible to allow free deformation of the specimen under a prescribed confining stress. The vertical length of balls is changed during shearing to compress the specimen. More details about the flexible membrane technique have been described by Wu et al. [32]. The detailed membrane parameters are also listed in Table 1. It should be mentioned that in the field of soil mechanics and geotechnical engineering, the soil sample commonly used in the test is cylindrical, and the ratio of the height to the diameter is 2–2.5. This value has been widely used by other researchers like De Bono and McDowell [9] and Alikarami et al. [2] to study the mechanical behaviour of granular soils under triaxial loading.
Wu et al. [32] showed that the results of their simulations almost perfectly agreed with those obtained through physical experiments. This means that even though the corresponding indoor triaxial experiments were not conducted in the present study, the validity of the selected parameters can be verified based on previous research. It should be noted that a small sample size is utilized mainly to satisfy the requirements of the rotation table at SSRF and to acquire full-field high-resolution cross-sectional CT images for the investigations of the grain-scale mechanics. This approach was employed by many researchers for the study of fabrics, inter-particle contacts, and grain-scale kinematics (e.g., [4, 6, 13, 28]). The experiments conducted by Cheng and Wang [6] also demonstrate that no significant boundary effects were found on the behaviours of sand.
Following the above methodology, three sets of mini-triaxial simulations, as shown in Fig. 6, were performed. All the tests have the same initial porosity of 0.35. During shearing, stress and strain responses, grain kinematics (i.e., rotation and displacement), fabric evolution, and porosity were monitored and recorded.

DEM model: a Sphere; b SH: 3; c SH: 15
3 Results and discussion
3.1 Stress–strain–dilation responses
All the simulations were conducted on a supercomputer with Intel Xeon Gold 6154 processors (3.0 GHz, Skylake-SP), with 18-core × 2-CPU and 192 GB of main memory. The computation time used for the simulations with spherical particles, SH: 3, and SH: 15, was about 12 h, 15 h, and 19 h, respectively.
The results of the DEM simulation of the mini-triaxial test using three types of particle (i.e., sphere, SH: 3, and SH: 15) are shown in Fig. 7 as plots of volumetric strain and deviatoric stress against axial strain. Figure 7a shows that the deviatoric stress exhibits a linear increase with the axial strain at the very beginning and reaches a peak value at an axial strain of approximately 7%. The deviatoric stress then undergoes a slight decrease and approaches a constant value, which is known as the ‘residual stage’. The comparison of the three curves in Fig. 7a shows that the stiffness and peak deviatoric stress increase with the irregularity of the component particles ranging from sphere to SH: 15. In addition, increasing the particle shape irregularity results in a higher residual deviatoric stress, and thus reduces the after-peak softening behaviour (e.g., [19]).

DEM simulation results: a stress response and b volumetric response
Figure 7b shows the volumetric strain versus axial strain relationships. The curves consistently show that compressions exist at low axial strain, followed by pronounced dilations. An increase in particle shape irregularity diminishes the initial volume contraction and makes the subsequent dilative behaviour more significant. This is because irregular shape of grains usually has a much higher interlocking force when comparing with simulations with spherical particles. This particle-interlocking effect constrains the movement of particles and leads to higher dilation of the assembly during triaxial test.
3.2 Grain kinematics
Figure 8 presents the magnitude fields of the particle displacement, rotation, and shear strain of the three specimens. Details of the calculation of the shear strain for granular materials are illustrated in Wang et al. [29]. The particles near the top end platen exhibited a large vertical downward displacement, while the particles at the bottom tended to be forced upward during the shear process. In the displacement field, a localised band emerged in the middle of the specimen, where the vertical displacement of the particles was firmly confined. In contrast, the rotation field did not exhibit a distinct spatial organisation as the displacement field did. However, we can still observe a banded area in which the particles rotated more intensely than in other areas, especially in Fig. 8e.

Evolution of shear bands during the shearing process
A typical form of the shear band is the one that originates from the upper part and then slants through the cylindrical specimen with an inclination angle of approximately 45°, as shown in Fig. 8f. The microstructure within the shear band is significantly different from that of the exterior. This difference strongly influences the kinematics, fabric evolution, and contact behaviours of the particles. Therefore, it is first necessary to classify the particles based on the calculated shear strains, as shown in Fig. 8 (bottom), and then investigate them. According to Cheng [5], particles with a shear strain greater than 0.25 are considered to be inside the shear zone and classified into Group 1, and the remaining particles outside the shear band are classified into Group 2.
The evolution of particle rotation with increasing axial strain for the sphere, SH: 3, and SH: 15 is shown in Fig. 9. In each figure, the average rotation degree (i.e., the average of absolute values of particle rotations) inside and outside the shear band is plotted, as well as the average rotation degree of the entire specimen. With increasing axial strain, there was a general tendency for the particle rotation degree to increase. In particular, the rotation of particles in Group 1 grew the fastest and fluctuated the most, while the particle rotation degree in Group 2 was well below that of Group 1 and showed a considerably flat growth. The overall degree of particle rotation appeared to be intermediate. This suggests that particles within the shear band rotate more freely during the shearing process. Furthermore, comparing three sets of tests with different particle shapes reveals that spheres have a higher degree of rotation than irregularly shaped particles. This is because the simulations with irregular shape of grains suffer from particle interlocking, which to some extend constrains the movement of particles ([18] and [17]).

The distributions of the average of absolute values of particle rotations for: a Sphere; b SH: 3; c SH: 15
Figure 10 shows the particle displacement in the vertical direction against the axial strain. The Z-displacement of the particles increased continuously during the entire shearing process. The results of the three tests consistently showed a slight change in the Z-displacement of the particles in Group 1 at approximately 4% of the axial strain. This is mainly because the specimen was not fully compacted until the axial strain reached approximately 4%. Therefore, the Z-displacement of the particles in Group 1 grew faster at the beginning. Subsequently, the particles were closely packed against each other, and the vertical movement of the particles in the shear band was restricted. Hence, the growth trend became much lower than that of the particles outside the shear band. Nevertheless, the values for the Z-displacement of the particles were relatively small in general and did not seem to be significantly affected by the particle shape.

The distributions of displacement for: a Sphere; b SH: 3; c SH: 15
3.3 Contact behaviours
To quantitatively evaluate the fabric evolutions obtained by the simulations, the deviatoric fabric was plotted against the axial strain. The formula for the second-order fabric tensor is defined as [25]:
where \(N_{c}\) is the number of contacts, \(F_{ij}\) is the fabric tensor, \(n_{i}^{k}\) is the kth component of the unit orientation vector along direction i. The difference between the maximum and minimum eigenvalues is defined as the deviatoric fabric.
Figure 11 depicts the evolution of the deviatoric fabric against the axial strain for the three specimens. When the axial strain was 0%, the deviatoric fabrics were almost close to zero for the three tests, which signified a nearly isotropic distribution at the initial stage. Upon further shearing, the degree of anisotropy increased with increasing axial strain and reached a peak at approximately 7% of the axial strain. After the peak, the degree of anisotropy gradually decreased and became stable. Additionally, the particles within the shear band clearly displayed an overall greater degree of anisotropy than those outside the shear band, especially for SH: 3 and SH: 15. This trend is attributed to the high-stress levels among particles inside the shear band. As reported by Kodicherla et al. [17, 18], the deviatoric fabric at small strain levels mainly relies on both the volume change and stress, while at high strain levels, the volume reaches a steady state and the deviatoric fabric relies only on the stress. Figure 11 shows that the maximum degree of anisotropy for SH: 15 was the highest among the three tests, whereas it was the lowest for the sphere. For SH: 3, the maximum degree of anisotropy was exactly in between. The reason for this observation is that compared to the simulations with spherical particles, irregularly shaped particles have a higher deviatoric stress owing to particle interlocking, which leads to a higher degree of soil fabric anisotropy.

The distributions of deviatoric fabric for: a Sphere; b SH: 3; c SH: 15
The observations above are also supported by Figs. 12, 13 and 14, which present the 3D polar distributions of the branch vector orientation for the sphere, SH: 3, and SH: 15, respectively, during several loading increments (i.e., 0%, 5%, 10%, and 15%) in the mini-triaxial test. The branch vector of a sand–sand contact is defined as the difference of the centroid coordinates of two particles in contact. In states of larger axial strain (i.e., 10% and 15%), the distributions of the branch vector orientation exhibit more pronounced anisotropy. In particular, it is seen that the distributions of the branch vector orientation in Group 1 appear to be fairly arbitrary, whereas, in Group 2, the distributions are relatively uniform. This agrees with the observations discussed previously.

Distributions with orientations of density of branch vectors for sphere

Distributions with orientations of density of branch vectors for SH: 3

Distributions with orientations of density of branch vectors for SH: 15
Figure 15 shows the relationship between the particle’s mean contact force (i.e., shear and normal forces) and the axial strain. Both the mean shear force and the mean normal force experienced a sharp growth with increasing axial strain at the beginning and then reached a steady state at large shear strains greater than 10%. When the mean contact force for particles in Group 1 is compared with that in Group 2 in each figure, it is found that the mean shear and normal forces are higher for the particles within the shear band than outside it. This can be attributed to the loose packing structure of the shear band, which reduces the number of contacts among the particles and enhances the mean contact force.

The distributions of the mean contact force for: a–b Sphere; c–d SH: 3; e–f SH: 15
Figure 15 reveals that the mean shear forces and normal forces for the sphere were the highest, and the mean shear forces and normal forces for SH: 15 were the lowest. This is because, the specimen consisting of irregular particles exhibits a more homogeneous distribution, resulting in a smaller mean contact force. Hence, in the triaxial test, the shape of the constituent particles significantly influences the particle contact behaviours. Specifically, with the increase in particle shape irregularity, the mean contact force among particles decreases in the triaxial test.
3.4 Distributions of porosity
Porosity is another vital index for further interpretation of the microstructure of sheared specimens. Therefore, a measurement sphere was generated in PFC3D to calculate the porosity. And the 3D coordinate system was converted into a planar coordinate system expressed in the azimuthal and elevation angles. Figures 16, 17 and 18 show the spatial distributions of porosity for the specimens consisting of spheres, SH: 3, and SH: 15, respectively. The colour at a given point denotes the porosity value, as indicated by the colour bar. The porosity distribution maps for Groups 1 and 2 are also presented in each figure. To do so, when the porosity of the particles in Group 1 was computed, the particles in Group 2 were removed, and vice versa.

The spatial distributions of porosity for a sphere; b spheregroup 1 and c sphere-group 2
As discussed previously, the structure of the shear band is supposed to be highly porous and correspond to a larger porosity value on the maps. Owing to the variability of the specimen, multiple types of shear bands can be observed in different triaxial tests. Figure 16 shows one typical type of shear band, which is an ‘X’-shaped axially symmetric shear band. However, a different pattern, as shown in Fig. 18, was also observed. A single inclined shear band originating from the upper part of the specimen for SH: 15 can be clearly seen in the figure. However, in Fig. 17, the shape of the shear band for SH: 3 is less obvious; this can also probably be classified as the latter type of shear band. Based on these findings, it is concluded that changes in the types of shear band are likely related to the shape of the constituent particles.

The spatial distributions of porosity for a SH: 3; b SH: 3-group 1 and c SH: 3-group 2

The spatial distributions of porosity for a SH: 15; b SH: 15-group 1 and c SH: 15-group 2
4 Concluding remarks
This paper takes a further step to elevate the model to explore the particle shape effect on the mechanical properties of granular materials. The used SH analysis allows us to generate sub-rounded particles and real sand particle morphologies for the implementation of the numerical simulations. Furthermore, the mesh-free method of evaluating internal strains of samples proposed by Wang et al. [29] was adopted for separately investigating the shear behaviours of particles inside and outside the shear band.
For the implementation of the numerical simulations of triaxial testing on the realistic sand particles, a set of advanced techniques including micro-CT, a series of image processing, SH analysis, and DEM modelling were used. During the DEM modelling, bubble packing algorithm, and flexible membrane that allows free deformation of the specimen were adopted. In the analysis of particle shape effect on the mechanical properties of granular materials, we investigated the shear behaviours of particles inside and outside the shear band at both the macroscopic and particle scales. In addition to particle kinematics and contact force, deviatoric fabric, branch vector, and void distributions were also investigated to demonstrate the particle shape effect. The principal conclusions of this study are summarised as follows.
The particles inside the shear band rotate more vigorously. However, they rarely have the freedom to move in the vertical direction owing to their localisation. The fabric evolution analysis demonstrated that more pronounced anisotropy occurs within the shear band. Furthermore, the simulation results revealed that the particle shape significantly affects the shear behaviours of the granular materials. It was observed that increasing the irregularity of the particle shape enhances the stiffness and peak deviatoric stress and contributes to a more obvious dilative behaviour. In terms of kinematics, spheres are more likely to rotate when sheared than irregular grains, while the particle shape seems to have little effect on their vertical displacement. The results also showed that the increase in particle shape irregularity effectively strengthens the degree of fabric anisotropy. Finally, the changes in the types of shear band are believed to be related to the particle shape. Further work can be made to establish the quantitative relationship between particle shape and the shear band types, and to investigate the effect of single particle shape indicator (e.g., aspect ratio, area sphericity, or convexity) on macroscopic soil mechanics using the technique of morphological gene mutation.
References
Afshar, T., Disfani, M.M., Arulrajah, A., Narsilio, G.A.: Microstructural analysis of particle crushing in construction and demolition materials using synchrotron tomography. In: 19th International Conference on Soil Mechanics and Geotechnical Engineering, Vol. 2017-Septe No. September (2017)
Alikarami, R., Andò, E., Gkiousas-Kapnisis, M., Torabi, A., Viggiani, G.: Strain localisation and grain breakage in sand under shearing at high mean stress: insights from in situ X-ray tomography. Acta Geotech. 10(1), 15–30 (2014)
Andò, E., Hall, S.A., Viggiani, G., Desrues, J., Bésuelle, P.: Grain-scale experimental investigation of localised deformation in sand: a discrete particle tracking approach. Acta Geotech. 7(1), 1–13 (2012)
Andò, E., Viggiani, G., Hall, S.A., Desrues, J.: Experimental micro-mechanics of granular media studied by x-ray tomography: recent results and challenges. Géotech. Lett. 3(3), 142–146 (2013)
Cheng, Z.: Investigation of the grain-scale mechanical behavior of granular soils under shear using x-ray micro-tomography. PhD thesis City University of Hong Kong (2018)
Cheng, Z., Wang, J.: A particle-tracking method for experimental investigation of kinematics of sand particles under triaxial compression. Powder Technol. 328, 436–451 (2018)
Cil, M.B., Alshibli, K.A.: 3D assessment of fracture of sand particles using discrete element method. Géotech. Lett. 2(3), 161–166 (2012)
De Bono, J., Mcdowell, G., Wanatowski, D.: Discrete element modelling of a flexible membrane for triaxial testing of granular material at high pressures. Géotech. Lett. 2(4), 199–203 (2012)
De Bono, J.P., McDowell, G.R.: DEM of triaxial tests on crushable sand. Granul. Matter 16(4), 551–562 (2014)
Ferellec, J.F., McDowell, G.R.: A simple method to create complex particle shapes for DEM. Geomech. Geoeng. 3(3), 211–216 (2008)
Fu, R., Hu, X., Zhou, B.: Discrete element modeling of crushable sands considering realistic particle shape effect. Comput. Geotech. 91, 179–191 (2017)
Garboczi, E.J.: Three-dimensional mathematical analysis of particle shape using X-ray tomography and spherical harmonics: application to aggregates used in concrete by CONCRETE. Cem. Concr. Res. 32(10), 1621–1638 (2002)
Hall, S.A., Bornert, M., Desrues, J., Pannier, Y., Lenoir, N., Viggiani, G., Bésuelle, P.: Discrete and continuum analysis of localised deformation in sand using X-ray μCT and volumetric digital image correlation. Géotechnique 60(5), 315–322 (2010)
Itasca Consulting Group.: PFC3D (particle flow code in three dimensions), version 6.0. Minneapolis: Itasca Consulting Group (2018)
Karatza, Z., Andò, E., Papanicolopulos, S.-A., Viggiani, G., Ooi, J.Y.: Effect of particle morphology and contacts on particle breakage in a granular assembly studied using X-ray tomography. Granul. Matter 21(3), 44 (2019)
Kawamoto, R., Andò, E., Viggiani, G., Andrade, J.E.: All you need is shape: predicting shear banding in sand with LS-DEM. J. Mech. Phys. Solids 111, 375–392 (2018)
Kodicherla, S.P.K., Gong, G., Wilkinson, S.: Exploring the relationship between particle shape and critical state parameters for granular materials using DEM. SN Appl. Sci. 2(12), 2128 (2020)
Kodicherla, S.P.K., Gong, G., Yang, Z.X., Krabbenhoft, K., Fan, L., Moy, C.K.S., Wilkinson, S.: The influence of particle elongations on direct shear behaviour of granular materials using DEM. Granul. Matter 21(4), 86 (2019)
Nie, Z., Fang, C., Gong, J., Yin, Z.Y.: Exploring the effect of particle shape caused by erosion on the shear behaviour of granular materials via the DEM. Int. J. Solids Struct. 202(May), 1–11 (2020)
Otsu, N.: A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 9(1), 62–66 (1979)
Pabst, W., Gregorova, E.: Characterization of particles and particle systems. ICT Prague 122, 122 (2007)
Santamarina, J.C., Cho, G.C.: Soil behaviour: the role of particle shape. Advances in Geotechnical Engineering: The Skempton Conference, pp. 604–617 (2004)
Shields, Y., Garboczi, E., Weiss, J., Farnam, Y.: Freeze-thaw crack determination in cementitious materials using 3D X-ray computed tomography and acoustic emission. Cem. Concrete Compos. 89, 120–129 (2018)
Taghavi, R.: Automatic clump generation based on mid- surface. In: Proceedings of 2nd International FLAC/DEM Symposium, Melbourne, pp. 791–7 (2011)
Thornton, C.: Numerical simulations of deviatoric shear deformation of granular media. Géotechnique 50(1), 43–53 (2000)
Tickell, F.G.: The examination of fragmental rocks. Stanford University Press, Stanford (1931)
Tsigginos, C., Zeghal, M.: A micromechanical analysis of the effects of particle shape and contact law on the low-strain stiffness of granular soils. Soil Dyn. Earthq. Eng. 125(October 2018), 105693 (2019)
Vlahinić, I., Kawamoto, R., Andò, E., Viggiani, G., Andrade, J.E.: From computed tomography to mechanics of granular materials via level set bridge. Acta Geotech. 12(1), 85–95 (2017)
Wang, J., Dove, J.E., Gutierrez, M.S.: Discrete-continuum analysis of shear banding in the direct shear test. Géotechnique 57(6), 513–526 (2007)
Wieneke, B.: Volume self-calibration for 3D particle image velocimetry. Exp. Fluids 45(4), 549–556 (2008)
Wu, M., Xiong, L., Wang, J.: DEM study on effect of particle roundness on biaxial shearing of sand. Undergr. Space 6(6), 678–694 (2021)
Wu, M., Wang, J., Russell, A., Cheng, Z.: DEM modelling of mini-triaxial test based on one-to-one mapping of sand particles. Géotechnique 71(8), 714–727 (2021)
Wu, M., Wang, J., Zhao, B.: DEM modeling of one-dimensional compression of sands incorporating statistical particle fragmentation scheme. Can. Geotech. J. 852, 1–14 (2021)
Yin, Z.Y., Wang, P., Zhang, F.: Effect of particle shape on the progressive failure of shield tunnel face in granular soils by coupled FDM-DEM method. Tunnel. Undergr. Space Technol 100(March), 103394 (2020)
Zhang, T., Zhang, C., Zou, J., Wang, B., Song, F., Yang, W.: DEM exploration of the effect of particle shape on particle breakage in granular assemblies. Comput. Geotech. 122(February), 103542 (2020)
Zhou, B., Wang, J., Wang, H.: A novel particle tracking method for granular sands based on spherical harmonic rotational invariants. Géotechnique, pp. 1–8 (2018)
Zhou, B., Wang, J., Zhao, B.: Micromorphology characterization and reconstruction of sand particles using micro X-ray tomography and spherical harmonics. Eng. Geol. 184(14), 126–137 (2015)
Acknowledgements
This study was supported by General Research Fund Grant Nos. CityU 11201020 and CityU 11213517 from the Research Grants Council of the Hong Kong SAR and Research Grant No. 51779213 from the National Natural Science Foundation of China and the Strategic Research Grant No. 7005039 from the City University of Hong Kong and the BL13W beamline of the Shanghai Synchrotron Radiation Facility (SSRF), China. The authors are grateful to the anonymous reviewers and the editor for their valuable suggestions to improve the manuscript.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Wu, M., Wu, F. & Wang, J. Particle shape effect on the shear banding in DEM-simulated sands. Granular Matter 24, 48 (2022). https://doi.org/10.1007/s10035-022-01210-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10035-022-01210-0