
Abstract
Purpose
The use of extraperitoneal mesh in place of intra-peritoneal mesh is gaining popularity in laparoscopic ventral hernia repair. We have adopted a robotic assisted laparoscopic technique using a lateral single-dock robotic access with retromuscular mesh placement after opening the ipsilateral posterior rectus fascia. In this study, we wanted to evaluate the changes in operative times during the initial experience with this novel technique.
Methods
The initial consecutive patients undergoing robotic assisted transabdominal retromuscular umbilical prosthetic repair (r-TARUP) using a 15 × 15 cm self-fixating mesh were prospectively entered in the study and the operative times during the separate steps of the surgical procedure were recorded. Complications were reported up to 4 week post operatively and quality of life was assessed using the EuraHS-QoL score.
Results
Over a 5 month inclusion period, 41 patients with either a primary (n = 34) or a trocar site hernia (n = 7) at the umbilicus were identified. All hernias had a mean diameter of less than 4 cm. The total OR time decreased significantly during the learning curve (tertile 1: 126 min versus tertile 3: 102 min; p = 0.002) due to a decrease in the skin-to-skin operating time (tertile 1: 81 min versus tertile 3:61 min; p = 0.002). The decrease in the retromuscular dissection time was the most significant of all the steps that comprised the console time (p = 0.004). The non-surgical time did not decrease (p = 0.15). The operation was performed on an outpatient basis in 68% of patients and with a one-night-stay in 29%. No complications related to the introduction of the robotic technique for this approach were observed and the early outcome is promising, with favorable quality-of-life evaluation at 4 weeks.
Conclusions
The decrease in operative time during the adoption of r-TARUP was mainly related to the improved efficiency in the dissection phase of the procedure. The technique is reproducible and safe and the operative time compares favorably to published operative times for laparoscopic and open retromuscular umbilical hernia repair.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Background and rationale
The main benefit of laparoscopic ventral hernia repair over open ventral hernia repair is the decreased risk of wound morbidity [1]. Traditionally, a laparoscopic ventral hernia repair is performed with placement of an intra-peritoneal mesh [2, 3]. Long-term disadvantages are related to adhesion formation to the intra-abdominal mesh leading to increased complexity during subsequent abdominal surgeries [4, 5]. Moreover, the fixation of the intra-peritoneal mesh, using tacks with or without transabdominal sutures, can cause pain in both the immediate postoperative period and at longer term follow-up [6]. For small to medium sized ventral hernias, specific intra-peritoneal mesh devices have been developed, which allow for a quick and straightforward open repair. These intra-peritoneal meshes carry a risk of complications [7] and the utility has been disappointing in our own experience for hernias larger than 2 cm in diameter [8]. Difficulty with deployment of these devices in a flat position and the relatively small mesh sizes available have been drawbacks of this technique. In addition, the superiority of a retromuscular mesh position has been demonstrated by Berrevoet et al. [9,10,11].
In 2013, Schroeder et al. described a laparoscopic transabdominal technique of ventral hernia repair using a lateral approach to the retromuscular plane by opening the ipsilateral posterior rectus fascia [12]. With this technique, they combined the benefits of a laparoscopic approach and the avoidance of intra-peritoneal mesh. They concluded that the technique was safe and effective, but was technically demanding. We expected that using the robotic platform to perform this novel technique would facilitate the technically demanding steps of defect closure and suturing of the ipsilateral posterior rectus sheath.
We began a clinical project investigating the utility of the robotic platform for the treatment of abdominal wall hernias (Robotic Utility for the Surgical Treatment of hernias; ROBUST-project) at the surgical department of the Maria Middelares hospital and published a first study on robotic assisted groin hernia repair (r-TAPP) [13]. During a second study, Robust-2, we wanted to investigate the evolution during the learning curve of the operative times for the different surgical steps in performing lateral single-dock robotic retromuscular ventral hernia repair. In our department, we have named the technique: r-TARUP (robotic-TransAbdominal Retromuscular Umbilical Prosthesis).
Objectives
To evaluate the evolution of the operative times, with specific focus on the different surgical steps in performing r-TARUP during the learning curve of the first consecutive patients.
Methods
Study design
The study is a prospective single center observational cohort study on the experience with r-TARUP in a consecutive initial series of 41 operations during the robotic learning curve.
Setting
The study was performed at Maria Middelares Hospital in Ghent, Belgium, using a daVinci Xi robotic system (dV Xi, Intuitive, Sunnyvale, CA, US). All operations were performed by a single surgeon with limited clinical experience with robotic assisted surgery prior to this study. Preparation before the first surgeries involved obtaining the certificate for the dV Xi, System Modules for Surgeons Online Training Module and extensive training on the dV Xi simulator using exercises developed by Mimic Technologies®and Simbionix™ encompassing 30 h. Further hands on preparation involved a cadaver lab in Paris at the Ecole Européenne de Chirurgie with an instructor and participation in the 1st International Hernia Collaboration skills lab in New York including a cadaver course. Prior to the start of this study another study on r-TAPP was initiated [13].
An experienced nursing and anesthesiology team participated in this study after having been members of the robotic urology program for several years. The surgeon performing the procedures in this study has a 15 + year experience with laparoscopic intra-peritoneal hernia repair (aka IPOM) and has performed about 10 laparoscopic TARUP operations before the start of the study.
The study was approved by the ethics committee at the University of Antwerp and by the local ethics committee at Maria Middelares Ghent hospital with the Belgian trial number B300201629630. The study protocol was submitted at ClinicalTrials.gov (NCT02975414) before the start of the study.
Participants
Inclusion criteria
Adult patients scheduled for elective treatment of an umbilical hernia, both primary or incisional, with a MIS technique were eligible for a robotic assisted approach.
Exclusion criteria
The following comprised our exclusion criteria: age under 18 years, pregnancy, lack of signed informed consent, recurrent umbilical hernia. Patients were excluded if the repair required a mesh size other than 15 × 15 cm, since we did not want differing mesh size to influence the operative times.
Follow-up
All patients were invited to a standard 4 week clinical outpatient follow-up visit with the surgeon.
Surgical technique
Patients were operated consecutively using the dV Xi robotic platform and were placed in supine position with both arms tucked alongside the body. We placed the boom of the robot on the right side of the patient and positioned the trocars on the left side. The outline of the 15 × 15 cm mesh was marked on the abdominal wall with the hernia defect centered. The cardinal points at cranio-caudal and latero-lateral extents were marked to allow intraoperative with transcutaneous needles delineating the extent of dissection required to allow placement of the mesh. An 8 mm trocar was placed at the subcostal position on the left side at the level of the anterior axillary line after creation of pneumoperitoneum with a Veress needle, using an intra-abdominal pressure of 12 mmHg. Two additional trocars (8 mm) are placed in the left flank at the same vertical line under direct vision. The distance between trocars was 7 cm at a minimum. Before docking the robot, we placed the following into the abdominal cavity: 15 × 15 cm mesh with rounded corners (Progrip™ Self-Fixating Mesh, Medtronic, Minneapolis, MN, US), sutures for closure of the hernia defect (V-Loc™ 2/0, Medtronic, Minneapolis, MN, US), sutures for closure of the ipsilateral posterior rectus fascia (V-Loc™ 3/0) and a linear ruler for defect measurement. These sutures are slowly absorbable barbed sutures.
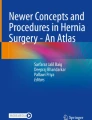
The trocars were docked to the robotic arms, with the endoscope at the middle trocar. The robotic instruments used included a Large Needle Driver, a ProGrasp™ Forceps and a Monopolar Curved Scissors (all instruments by Intuitive Surgical, Sunnyvale, CA, US). Hemostatic dissection was done using the monopolar scissors. The ipsilateral posterior rectus sheath was opened to access the retromuscular plane. Once the medial border of the ipsilateral rectus muscle was identified, the posterior rectus fascia was again incised longitudinally. This is done after identification of the junction between the anterior and posterior rectus fascia by incising the posterior rectus sheath contribution to the linea alba. This allows for access to the preperitoneal plane behind the linea alba to be dissected. The hernia contents were reduced preserving the intact peritoneum. The contralateral posterior rectus sheath was incised to perform a contralateral retromuscular dissection wide enough to allow placement of the 15 × 15 cm mesh. The hernia defect in the linea alba was closed with a 2/0 barbed suture after decreasing the intra-abdominal pressure to 8 mmHg. The self-fixating mesh was then placed in the retromuscular plane with the grips facing upwards towards the rectus muscles. Closure of the ipsilateral posterior rectus fascia was then accomplished with a barbed suture 3/0 (Fig. 1). Most patients were scheduled in an outpatient setting or with a one-night-stay depending on their age or comorbidities.

Anatomical drawing of the technique of minimal invasive transabdominal retromuscular umbilical hernia repair (TARUP)
Variables
The primary endpoint of this study was total OR time calculated as the time from the arrival to the departure of the patient from the operating room. The total OR time was divided into 7 individual steps and also separately analyzed.
All patients and surgical variables were entered prospectively in the EuraHS online database (European Registry for Abdominal Wall Hernias) [14]. Hernia specific quality of life was assessed preoperatively and at 4 week follow-up using the EuraHS-QoL score [14].
Data measurement
During the course of the surgery, 8 time points were documented on a paper case report form (CRF) : (1) arrival of the patient in the OR; (2) end of anaesthesia; (3) first skin incision; (4) surgeon at the console; (5) start placement of the mesh; (6) start suturing the peritoneum; (7) last skin suture; (8) patient exiting the OR. This results in 7 time blocks, T1–T7 in minutes. All data were entered in an excel table and the content was double checked with the CRFs for errors before the closure of the database and the start of the analysis.
Quantitative variables
The total OR time was the sum of all 7 times blocks (T1 + T2 + T3 + T4 + T5 + T6 + T7). The skin-to-skin operative time was the sum of T3 + T4 + T5 + T6 and we defined the non-surgical time as T1 + T2 + T7. We also analyzed separately the docking time (T3), the dissection time (T4), the mesh placement time (T5) and the peritoneal closure time (T6). Finally we defined the console time as T4 + T5 + T6.
For comparison of the evolution of the operative times during the learning curve, the patients were divided in 3 consecutive tertiles.
Bias
To diminish bias we excluded those patients, where a decision was made to place a mesh of a different size than 15 × 15 cm.
Study size
Since no published data on the learning curve for robotic assisted ventral hernia repair was available at the start of the study, a sample size of 40 patients was empirically chosen as being large enough to evaluate the learning curve effect on operative time and small enough to be performed within a reasonable timeframe.
Statistical methods
The statistical methodology was chosen and performed by an independent statistician. The distributions of patient characteristics were summarized using proportions (%N), or mean and standard deviations (SD). Operative times were summarized as the mean and SD in minutes and were presented overall and for the separate tertiles during the inclusion period. Differences across the tertiles were evaluated according to analysis of variance. Linear regression models were used to describe the change in operative times versus the learning curve. From these models, the average percentage change over the course of 1 year was estimated using the mean operating times during the initial 3 months in 9 patients as comparison and described in both minutes and percentages. For analysis of the EuraHS-QoL scores, the previously described methodology was used [14]. The change in EuraHS-QoL score assessed preoperatively and at 4 week follow-up, overall and for each of the 3 domains specifically, were statistically evaluated according to the Wilcoxon signed rank test. A separate analysis calculating Spearman correlation coefficients was performed according to patient or hernia characteristics, BMI, hernia size, reducibility of the hernia, primary versus trocar hernia and the content of the hernia sac. p values ≤ 0.05 were considered as indicating statistical significance. All analyses were performed using SAS software (release 9.4, Cary, NC, USA).
Results
Participants
Following proctoring on the use of the robotic system in September 2016 by US surgeons, 45 patients undergoing an r-TARUP procedure were enrolled in the study between September 2016 and December 2017 (study period 441 days). Four patients were excluded after it was decided intra-operatively to place a mesh larger than 15 × 15 cm because of a concomitant epigastric hernia or rectus diastasis repair. The study cohort was divided in tertiles: tertile 1 (0–144 days; N = 14 patients), tertile 2 (145–315 days; N = 14 patients), tertile 3 (316–441 days; N = 13 patients).
Descriptive data
Patient characteristics and the short term outcome of the study cohort are shown in Table 1. Patients had either small sized umbilical hernias (< 2 cm diameter) in 39% (n = 16/41) or medium sized umbilical hernias (diameter ≥ 2 cm and < 4 cm) in 61% (n = 25/41), according to the EHS classification [15]. They were either primary umbilical hernias in 83% (n = 34/41) or trocar hernias, following laparoscopic cholecystectomy (n = 5), appendectomy (n = 1) or prostatectomy (n = 1), in 17% (n = 7/41). The surgery was performed as an outpatient in 68% of patients and with a one-night-stay in 29%. Only one patient, the largest hernia in this series with a width of 3.2 cm and a length of 4.6 cm, stayed an extra night in hospital. The number of patients that were treated in an outpatient setting increased during the study, reaching 93% in the third tertile. A serious adverse event requiring surgical intervention was seen in two patients. One patient had a laparoscopic evacuation of a retromuscular hematoma on postoperative day 5 and one patient developed a peri-umbilical superficial skin infection 1 month postoperative and was treated with drainage and antibiotics. No meshes required removal. No complications specifically related to the introduction of the robotic approach were observed.
Outcome data
The distribution of the procedure times for the overall 41 patients and for the tertiles are shown in Table 2. The total OR time decreased significantly from 126 to 102 min (p = 0.002), which was due to a significant decrease in the skin-to-skin operating time from 81 min to 61 min (p = 0.002). There was no significant decrease of the non-surgical time (p = 0.15). The significant decrease in the console time (p = 0.006) was mainly related to a highly significant decrease in the dissection time from 43 to 29 min (p = 0.004), whereas the decrease in mesh placement time and in peritoneal closure time was not significant. The docking time also decreased over the course of the study, but this did not reach significance (p = 0.051). The evolution measured in minutes over the learning period of 15 months is depicted in Fig. 2a–h for the different procedure times as defined above.


Graphic depiction of the evolution in the operating times during the learning curve according to least square regression lines. a Total OR time; b skin-to-skin operating time; c non-surgical time; d console time; e docking time; f dissection time; g mesh placement time; h peritoneal closure time
In Table 3, the evolution of the procedure times during the learning curve is estimated with linear regression models. This shows a significant decrease in the total OR time, the skin-to-skin operating time, the console time, the dissection time, the mesh placement time and the docking time. No significant decrease in the non-surgical time or in the peritoneal closure time was observed.
Other analyses
Table 4 shows the estimated change of procedure times over 1 year and was calculated as the product of β1 (Table 3) × 12 (12 months). The average percentage change in the operative times was calculated in comparison to the mean procedure times during the first 3 months (N = 9 patients) of the study.
A separate analysis calculating Spearman correlation coefficients was performed according to patient or hernia characteristics. There was a significant association between skin-to skin operating time, the console time, the mesh placement time and the dissection time with the size of the hernia defect. There was no significant association between procedure times and the BMI of the patient, the reducibility of the hernia preoperatively or the type of umbilical hernia, primary or trocar site hernia.
Full data of the EuraHS-QoL scores were available for 36 patients. The results of the measurement preoperatively and 4 weeks postoperatively is shown in Table 5. The overall EuraHS-Qol score was significantly improved (p < 0.0001), as were the 3 domains: pain (p = 0.005), restriction of activity (p = 0.002) and esthetical discomfort (p < 0.0001).
Discussion
Key results
The total OR time needed to perform a single-dock lateral retromuscular repair with a self-griping mesh of 15 × 15 cm during the learning curve significantly decreased from 126 to 102 min. This was mainly due to a significant decrease in the skin-to-skin operating time from 81 to 61 min, primarily resulting from a significant decrease in the dissection time. The non-surgical time in the OR did not decrease significantly.
Limitations
The results of the study are valid within for the specific setting of the study, involving an experienced laparoscopic surgeon adopting the new technique of retromuscular ventral hernia repair combined with the adoption of robotic assisted laparoscopic surgery with the dV Xi robotic platform. This is all in a setting with nursing staff and anesthesiologists experienced with the robotic platform.
Interpretation
The surgeon has 15 years experience with laparoscopic ventral hernia repair using an intra-peritoneal mesh technique and the learning curve will likely be longer for surgeons inexperienced with complex laparoscopic procedures. Similarly, the OR team was already proficient with the dv Xi robotic system before the start of the study. The decreased dissection time in the retromuscular plane is mainly responsible for the decreased skin-to-skin operating time and total OR time. The lateral retromuscular approach gives a view of the anatomy that is less commonly seen during open or laparoscopic approach. The surgical dissection time is, therefore, likely to decrease with increasing confidence with the anatomy of this space. Some other components of the skin-to-skin operating time, namely mesh placement and docking, decreased significantly, but the peritoneal closure time did not. We surmise from these findings that increased proficiency with the new technique of lateral retromuscular dissection, rather than increased proficiency with the use of the robotic platform, is responsible for the decreased OR time.
Surgeon preparation prior to adopting robotic surgery is likely to have a significant impact on shortening the learning curve. The surgeon started with r-TAPP of groin hernias first, before progressing to more complex cases like ventral hernia repair. We believe that adoption of r-TAPP as the entry point allows the entire team (surgeon, aesthesia and nursing) to develop experience with the robotic technique and then transition to more complex abdominal wall procedures. Figure 3 shows the number of cases of robotic assisted abdominal wall surgeries during the first 16 months of the Robust Hernia project at Maria Middelares Ghent.

Graph on the number of cases of robotic assisted abdominal wall surgeries during the first 16 months in the Robust Hernia project at Maria Middelares Ghent, illustrating building experience with robotic groin hernia repair before moving to more complex cases like ventral and incisional hernia repair
The technique of laparoscopic lateral retromuscular ventral hernia repair has been published more than 5 years ago but has not achieved wide spread popularity [12]. This is probably related to the technically demanding skill of laparoscopic suturing of the hernia defect and of the ipsilateral posterior rectus fascia. Using the robotic platform for performing this operation increases the accuracy of the suturing with the wristed instruments and the highly improved ergonomic position of the surgeon during the suturing.
This novel technique has some critical surgical steps that need specific mentioning to avoid errors during dissection. First, the ipsilateral posterior rectus fascia should be opened well within the rectus sheath to avoid an incision which is lateral enough that it could harm the lateral neurovascular bundles of the rectus muscles and inadvertently damage the linea semilunaris lateral to the rectus sheath. Second, during the retromuscular dissection, the junction between the posterior and anterior rectus fascia should be correctly identified, to make sure that the posterior rectus fascia is incised correctly, allowing entry to the preperitoneal plane behind the linea alba. Inadvertently opening the anterior rectus fascia will lead to unwanted subcutaneous dissection in front of the linea alba. Finally, a well performed closure of the ipsilateral posterior rectus fascia is mandatory, because dehiscence of this suture line could lead to postoperative posterior intraparietal herniation of small bowel leading to obstruction or incarceration.
Concerning complications, we had one patient with a postoperative retromuscular hematoma at day 5 needing a revision by laparoscopy and one patient with a umbilical skin necrosis leading to a superficial skin infection. These complications are similar to those reported in the study by Schroeder et al., with two hematomas in the laparoscopic group, three hematomas in the open group and one umbilical skin necrosis in the laparoscopic group [12]. None of their hematomas required reoperation. A meticulous hemostatis during dissection in the retromuscular plane seems important to avoid these hematomas.
Our results with a mean skin-to-skin operative time of 73 min for the entire cohort and 61 min for the 3rd tertile of our study, compare favorably to other reported operative times for open or laparoscopic retromuscular treatment of umbilical hernias. In the study by Schroeder et al., the mean operative time (confirmed to be the skin-to-skin operative time by personal communication) for the laparoscopic retromuscular technique was 125 min and 115 min for the open retromuscular technique [12]. In the study by Berrevoet et al. the mean skin-to-skin operative time was 80 min for open retromuscular mesh repair [12]. The size of the retromuscular mesh differed between these studies, which might have had an impact on the operative time. In the study by Schroeder et al., the mean mesh size in the open group was 409 cm2 and 405 cm2 for the laparoscopic group [12]. Berrevoet et al. reported the mean mesh size to be 81 cm [11]. In the current study, the mesh size was standardized and was 225 cm2 (15 × 15 cm). Berrevoet et al. have also published their data in the repair of umbilical hernias with a round mesh device through an open approach with the mesh positioned in an intra-peritoneal or preperitoneal position. They reported a mean skin-to-skin operative time of 34 min and a mean mesh size of 46 cm2 [11]. This approach has a much shorter operating time, but the mesh size and the mesh position are different from the technique of the current study.
Because this technique does not involve penetrating mesh fixation with tackers or sutures like in intra-peritoneal ventral hernia repair, it can be expected to result in less postoperative pain. This is reflected in an overall percentage of 68% of patients treated in day surgery. With increasing confidence with the robotic retromuscular approach, the utilization of day surgery for this technique increased above 90% for the last tertile of the current study (Table 1). The evaluation at 4 weeks using the EuraHS-QoL score noted significant improvement for all 3 domains (Table 5). The hospital stay of our study compares very favorably with the reported hospital stay of the laparoscopic series of 43 patients published by Schroeder et al. with a mean of 3.4 days [12]. This is surprising, since the laparoscopic technique is essentially similar to the robot assisted laparoscopic approach, and similar postoperative results would be expected. The longer hospital stay is likely related to the differences in health care and hospital financing between Belgium and Germany. In Belgium, treatment as an outpatient is encouraged, while in Germany, a short hospital stay is financially unfavorable.
The technique of single-dock lateral retromuscular ventral hernias repair has demonstrated promising early results and the operative times are not significantly longer compared with the open retromuscular technique or with laparoscopic retromuscular technique using a similar mesh size. We are currently gathering data on a larger cohort of patients including a follow-up at 12 months to evaluate longer term outcome.
Generalizability
The study was performed with the dV Xi robotic system. The learning curve with other systems might be different and more prolonged. For each program starting robotic abdominal wall surgery, the learning curve will depend on the previous experience of the surgeon and the OR team, both in MIS surgery and with the robotic system.
References
Sauerland S, Walgenbach M, Habermalz B, Seiler CM, Miserez M (2011) Laparoscopic versus open surgical techniques for ventral or incisional hernia repair. Cochrane Database Syst Rev 3:CD007781
LeBlanc KA, Booth WV (1993) Laparoscopic repair of incisional abdominal hernias using expanded polytetrafluoroethylene: preliminary findings. Surg Laparosc Endosc 3:39–41
Heniford BT, Park A, Ramshaw BJ, Voeller G (2003) Laparoscopic repair of ventral hernias: nine years’ experience with 850 consecutive hernias. Ann Surg 238:391–400
Sharma A, Chowbey P, Kantharia NS, Baijal M, Soni V, Khullar R (2018) Previously implanted intra-peritoneal mesh increases morbidity during re-laparoscopy: a retrospective, case-matched cohort study. Hernia 22:343–351
Patel PP, Love MW, Ewing JA, Warren JA, Cobb WS, Carbonell AM (2017) Risks of subsequent abdominal operations after laparoscopic ventral hernia repair. Surg Endosc 31:823–828
Muysoms F, Vander Mijnsbrugge G, Pletinckx P, Boldo E, Jacobs I, Michiels M, Ceulemans R (2013) Randomized clinical trial of mesh fixation with “double crown” versus “sutures and tackers” in laparoscopic ventral hernia repair. Hernia 17:603–612
Muysoms FE, Bontinck J, Pletinckx P (2011) Complications of mesh devices for intraperitoneal umbilical hernia repair: a word of caution. Hernia 15:463–468
Bontinck J, Kyle-Leinhase I, Pletinckx P, Vergucht V, Beckers R, Muysoms F (2014) Single centre observational study to evaluate the safety and efficacy of the Proceed Ventral Patch to repair small ventral hernias. Hernia 18:671–680
Berrevoet F, Van den Bossche B, de Baerdemaeker L, de Hemptinne B (2010) Laparoscopic evaluation shows deficiencies in memory ring deployment during small ventral hernia repair. World J Surg 34:1710–1715
Reynvoet E, Chiers K, Van Overbeke I, Troisi R, Berrevoet F (2015) Intra-peritoneal mesh devices for small midline hernias: mesh behavior in a porcine model. Hernia 19:955–963
Berrevoet F, D’Hont F, Rogiers X, Troisi R, de Hemptinne B (2011) Open intraperitoneal versus retromuscular mesh repair for umbilical hernias less than 3 cm diameter. Am J Surg 201:85–90
Schroeder AD, Debus ES, Schroeder M, Reinpold WFJ (2013) Laparoscopic transperitoneal sublay mesh repair: a new technique for the cure of ventral and incisional henrias. Surg Endosc 27:648–654
Muysoms F, Van Cleven S, Kyle-Leinhase I, Ballecer C, Ramaswamy A (2018) Robotic assisted laparoscopic groin hernia repair: observational case-control study on the operative time during the learning curve. Surg Endosc. https://doi.org/10.1007/s00464-018-6236-7 (Epub ahead of print)
Muysoms F, Campanelli G, Champault GG, DeBeaux AC, Dietz UA, Jeekel J, Klinge U, Köckerling F, Mandala V, Montgomery A, Morales Conde S, Puppe F, Simmermacher RK, Śmietański M, Miserez M (2012) EuraHS: the development of an international online platform for registration and outcome measurement of ventral abdominal wall hernia repair. Hernia 16:239–250
Muysoms FE, Miserez M, Berrevoet F, Campanelli G, Champault GG, Chelala E, Dietz UA, Eker HH, El Nakadi I, Hauters P, Hidalgo M, Hoeferlin A, Klinge U, Montgomery A, Simmermacher RKJ, Simons MP, Śmietański M, Sommeling C, Tollens T, Vierendeels T, Kingsnorth A (2009) Classification of primary and incisional ventral hernias. Hernia 13:407–414
Funding
The study is investigator initiated and was funded with a research grant from the Committee for innovation of Maria Middelares Ghent, Belgium. The cost for the independent statistical analysis was funded by BVBA Dokter Filip Muysoms.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
FM declares conflict of interest not directly related to the submitted work (research grant and consultancy fees from Medtronic, research grants and speakers fees from Dynamesh, speakers fee from Bard Davol, proctoring contract and consultancy fees for Intuitive Surgical, consultancy fees from CMR surgical). SVC declares no conflict of interest. PP decares no conflict of interest. CB declares conflict of interest not directly related to the submitted work (consultancy fees from Intuitive Surgical and Bard Davol). AR declares conflict of interest not directly related to the submitted work (consultancy fees from ValenTx).
Ethical approval
The study was approved by the ethics committee at the University of Antwerp and by the local ethics committee at Maria Middelares Ghent hospital with the Belgian trial number B300201629630.
Informed consent
All patients signed the informed consent form.
Human and animal rights
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki declaration and its later amendments or comparable ethical standards.
Study registration
The study protocol was submitted at ClinicalTrials.gov (NCT02975414) before the start of the study.
Rights and permissions
About this article

Cite this article
Muysoms, F., Van Cleven, S., Pletinckx, P. et al. Robotic transabdominal retromuscular umbilical prosthetic hernia repair (TARUP): observational study on the operative time during the learning curve. Hernia 22, 1101–1111 (2018). https://doi.org/10.1007/s10029-018-1825-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10029-018-1825-x