
Abstract
This paper deals with recent experimental and numerical research in the possible reduction of windage power losses (WPL). It is accepted that these load-independent losses become prominent over other sources in mechanical transmissions with peripheral speeds above 100 m/s as is the case in energy production, aeronautics and electric vehicles. So far, the majority of the experiments and models deal with WPL evaluation for one single rotating pinion. The unique test rig designed at INSA Lyon makes it possible to measure both the WPL of a single pinion or a non-meshing pinion-gear pair. A number of comparisons between experimental and numerical results are presented and commented upon. It is shown, that the gear environment changes the airflow and, in depending on the cases, it can either reduce or increase WPL. Finally, the influence of pinion-gear couplings on WPL is discussed as well as the interest of shrouds and deflectors.
Zusammenfassung
Dieser Artikel befasst sich mit neueren experimentellen und numerischen Untersuchungen zur möglichen Reduzierung von Luftwiderstandsverlusten (WPL). Es wird davon ausgegangen, dass diese lastunabhängigen Verluste bei mechanischen Getrieben mit Umfangsgeschwindigkeiten über 100 m/s gegenüber anderen Quellen eine herausragende Rolle spielen, wie dies bei der Energieerzeugung, in der Luftfahrt und bei Elektrofahrzeugen der Fall ist. Bisher befasst sich die Mehrzahl der Experimente und Modelle mit der WPL-Bewertung für ein einzelnes rotierendes Ritzel. Mit dem einzigartigen Prüfstand von INSA Lyon kann sowohl die WPL eines einzelnen Ritzels als auch eines nicht kämmenden Ritzelpaares gemessen werden. Eine Reihe von Vergleichen zwischen experimentellen und numerischen Ergebnissen wird vorgestellt und kommentiert. Es wird gezeigt, dass die Getriebeumgebung den Luftstrom verändert und in Abhängigkeit von den Fällen die WPL entweder verringern oder erhöhen kann. Abschließend wird der Einfluss von Ritzelkupplungen auf die WPL sowie das Interesse von Abdeckungen und Deflektoren erörtert.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Background
The study of windage power losses (WPL) in gears is a relatively new topic in the field of mechanical transmissions. In most geared transmissions, WPL can be neglected compared with significantly larger power losses such as those associated with the gear mesh, for example. However, WPL increase sharply with speed and become prominent in several particular industrial cases such as turbines in energy generation, naval and helicopter applications.
The pioneering research in this field was carried out by Dawson [1] in 1984. His home-made test rig using large cardboard gears and man-powered windlass was very successful and most of his findings are still accepted today. The main conclusion of his research was the nearly cubic dependency of WPL on speed, a very high influence of tooth module and the mechanical environment of the rotating gear. Contrary to intuition, it was found that shrouds placed around a gear could reduce WPL. Further researchers tried to establish analytical formulae for WPL based on gear geometry, rotational speed and parameters related to the environment., In this context, the empirical formulae of Anderson [2], Townsend [3], Lord [4] and Diab [5] derived from systematic experimental measurements are amongst the most representative attempts. However, it seems that these formulae are mostly valid for spur gears and can hardly be used to precisely calculate WPL in the case of helical gears (i.e. Voeltzel [6]).
With the increase in computational capacity, “Computational fluid dynamics” (CFD) based on finite volume method has been applied to the prediction of gear windage losses. This method proved to be versatile and was used in many different situations, its main drawback remains, however, the calculation time. The prediction of the WPL for a shrouded bevel gear attracted particular attention and was investigated experimentally by Johnson [7], Winfree [8] and Simmons [9] and numerically by Arisawa [10]. Such a gear is used in most aero turbines to transmit power from the turbine to the reducer. A single shrouded spur gear was investigated by Al-Shibl [11] using a 2D CFD method. It was found, that, unlike axial shrouds, peripheral shrouds have little and rather unpredictable impact on WPL reduction. The influence of tooth geometry along with that of the lubricant were studied by a 2D CFD method by Chaari [12]. A simplified periodical 3D CFD method was applied to a spur gear example by Pallas [13] in an effort to understand the air flow circulation around a rotating gear. Concli [14] proposed a full 3D simulation of a gear in a casing and found a good agreement with power loss measurements. The author has recently presented results from 3D simulations and experimental results for a fully immersed gear pair [15]. A similar analysis of a gear pair was conducted by Burberi [16], followed by an experimental analysis of a single spur gear using a particle image velocity technique (PIV) by Massini [17].
Based on extensive measurements of the WPL for a pinion and a gear, Ruzek [18] recently showed that it was generally close to the sum of the individual losses for each gear with, in some cases, a tendency to be slightly lower, suggesting some degree of interaction between the rotating parts. In the continuation of this work, it has been decided to investigate numerically (using a CFD method) the windage power losses induced by a system of two identical spur gears. The main purpose of this article is to study the capacity of CFD techniques to estimate correctly the WPL for two non-meshing gears so that friction and pocketing losses can be discarded. The final objective is to understand the flow pattern characteristics for a pinion-gear pair in the presence of shrouds and shed light on the mechanisms possibly leading to WPL reduction. Comparisons between the experimental and numerical findings in the case of a single pinion and a gear pair are presented in order to assess the numerical approach.
2 Experimental approach
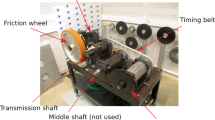
The experimental test rig dedicated to the study of the windage power loss was developed in LaMCoS laboratory (Fig. 1). It enables the measurement of the WPL of a single pinion as well as a gear pair. It should be noticed that the gears do not mesh during operation, there is a little clearance between them as can be seen on the right Fig. 1. However, a timing belt synchronizes the motion of the gears. This test rig was specially designed to measure WPL only with as little interference from other sources of power loss as possible. That is why the gears do not mesh in order to avoid a very important meshing loss. The system is accelerated to its maximal speed by a friction wheel. Once the maximum speed is reached, the friction wheel disengages and the system of three shafts slows down freely. The power loss is deduced from the deceleration curve. A detailed description of this experimental rig is presented in reference [18] dedicated to experimental aspects like the calibration procedure, repeatability issues, separation of WPL from other losses etc.

Windage power loss test rig
In this study, we consider two identical spur gears with characteristics listed in Table 1.
The WPL is measured from zero up to 150 Hz rotation frequency, which corresponds to 140 m/s of peripheral speed of the pinion tooth tip.
3 Numerical approach
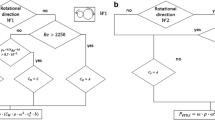
A numerical approach is employed using identical configurations as the experimental ones in order to investigate its capacity to correctly predict the windage power losses. Either one single gear or two gears are present so the numerical approach must consider the mentioned moving solids. “Frozen Rotor” (also known as Multiple Reference Frame) and “Sliding Mesh” (i.e. transient rotor stator) methods are widely used when relative motions between moving and stationary parts are involved in computations. A method as “Dynamic Mesh” that necessitates remeshing could be avoided since the distance between tip teeth is sufficiently high. Frozen Rotor is the most simple of the two former and the equations for the rotating region are solved using a rotating framework including inertial effects whereas the equations for the stationary region are solved using a stationary framework. The numerical solutions from both regions are matched at an interface. In the sliding mesh approach full transient simulations are carried out using two grid zones and the mesh associated with the inner region rotates. The latter approach is usually preferred when there are great interactions between the flow induced by the inner region and its environment. These two previous approaches are used here in both single pinion and gear-pinion pair configurations. When using frozen rotor or transient methods the entire domain must be cut in two or three subdomains (Fig. 2) depending on what configuration is investigated (i.e. a single pinion or a gear-pinion pair): (i) one domain comprising each gear involved in the computation and the associated fraction of the blank and (ii) a domain representing the remaining external space around the gears. The radial extension of gear subdomain is maintained one tooth eight higher than gear tip radius and its axial extension equals one real gear width. Moreover the extension of the external domain is large enough so that boundary conditions imposed do not influence the numerical solution. Only half width of the gear is considered here for decreasing the number of nodes.

View of the domain, mesh and boundary conditions for configuration with a gear-pinion pair
Simulations based on the Reynolds—Averaged Navier—Stokes (RANS) theory have been carried out using the SST k—ω low—Reynolds turbulence model proposed by Menter [19] using ANSYS CFX 18.1 code. The air flows are supposed to be incompressible as a simplification even if the maximum local Mach number was found to be equal to 0.4 when rotation frequency equals 150 Hz. Steady or transient state equations are solved on inhomogeneous meshes with strong clustering close to the walls in order to capture the near-wall turbulent region (y+ <3 at the first grid points away from all walls). For all the computations, a nil velocity is imposed at all the nodes located on the gear tooth surfaces, and outlet conditions are applied to the surfaces at the limits of the external computational domain. The normal velocity component at the planes of symmetry is set to zero. When sliding mesh is employed the timestep value (∆t) is chosen so that ∆t = T/(Z × 20) with T the gear period and Z the number of teeth. The surrounding fluid is supposed to be pure air, the physical properties of which are evaluated at 25 °C (e.g. ρ = 1.185 kg/m3 and μ = 1.831 × 10−5 Pa.s). Convergence is reached when both the equation residuals are low and the torque caused by windage keeps constant amplitude.
4 Results
Two configurations are dealt with:
-
A single pinion moving in the air (no lubricant) at ambient temperature and pressure.
-
A pair of synchronized gears with a center distance of 305 mm. In this configuration, there is 9 mm clearance between the tips of the teeth. It has been shown in [18] that this clearance does not have a measurable influence on WPL when varying from 9 to 49 mm for this geometry of gears.
4.1 A single pinion
One single wheel is mounted in this configuration and it is thus possible to employ analytical model proposed in the past for predicting WPL. Here, both experimental and numerical results are compared with those predicted using Diab analytical model [5], which is considered to be the most precise. Five independent experiments are shown in addition to this graphic in order to include the scatter of the measurement technique. As expected Diab model predictions are close to experimental measurements. One notices as well that the numerical data compares well with measurements at 100 Hz rotation frequency whereas the former overestimates the measurements by 17% at 150 Hz (Fig. 3). This was already observed in previous works for high tangential velocity by Pallas et al. [20] that employed the same numerical approach. One observes moreover that using frozen rotor or sliding mesh does not influence the windage power losses predicted numerically (Table 2) meaning that there is no interaction between flows expelled by the gear and its environment.

Windage power loss evaluation for one pinion. Comparison of numerical and experimental results
4.2 A gear-pinion pair
In this configuration, the two gears are mounted on the test rig and, unlike the previous case, there is no analytical model here for predicting gear pairs WPL. It is then generally supposed that the power loss of the system of gears is merely a sum of the individual power losses. The experience validates this hypothesis as long as the frequency value remains lower than the critical frequency rotation equal to 100 Hz, i.e. peripheral speed value lower than 93 m/s (Fig. 4). When the frequency value becomes higher (e.g. 150 Hz) this is no more observed since using a gear-pinion pair generates 10% less WPL than adding the two contributions of one single gear. This rather surprising observation can be explained as follows. One wheel turning creates a flow of air around it (Fig. 5a) and this flow drags the second wheel into rotation which reduces the opposition of the surrounding air (Fig. 5b).

Windage power loss evaluation for two not meshing gears (CFD predictions correspond to sliding mesh approach)

Instantaneous dimensionless absolute velocity in meridian and symmetry planes, instantaneous absolute velocity vectors at 150 Hz (a single pinion; b gear-pinion pair)
When considering the numerical predictions, one observes at first that using frozen rotor or sliding mesh approaches do not lead to similar windage power losses (Table 3) and relative difference equal to nearly 18% is noticed at the two frequencies. It seems then that interactions occur here between the flows induced by the two rotating spur gears. Consequently, sliding mesh approach would lead to better predictions and will be therefore used in future investigations. According to Fig. 4, one can notice that both the numerical and experimental results show that the gears system (blue) generates less WPL than the sum of individual pinions (red). However, the numerical approach predicts this difference for both 100 and 150 Hz, while the from the experimental standpoint, the difference is null at 100 Hz. Moreover, the CFD value overestimates by 13% at 150 Hz and underestimates by 15% at 100 Hz the experimental ones.
The numerical solutions highlight different velocity distribution in the vicinity of the gears depending on the configuration studied. When one single pinion is employed one observes that the absolute velocity has small amplitude in a meridian plane located near the pinion (Fig. 5a). This is due to the radial ejection of the flow by the rotating teeth leading to flows aligned with symmetry plane as observed by Hill et al. [21] and Marchesse et al. [20]. This is no more the case when a gear-pinion pair is used this time since the fluid is ejected from the symmetry plane leading to greater absolute velocity in the same meridian plane that is equally located to the two axes (Fig. 5b). The regions far from this plane exhibit the same flows as noticed for one single pinion. As consequence, the modification only occurs in the region located between the two gears and has an impact of WPL process.
5 Conclusions and perspectives
An original test rig has been used here for measuring the windage losses generated by both a single gear and a gear-pinion pair. In addition, a numerical approach has been investigated in order to validate or not its capability to predict correctly WPL in such configurations. It has been shown, that the frozen rotor method can only be used in the case of a single pinion, in case of pinion-gear problem, sliding mesh method must be used instead. Both experimental and numerical approaches showed that the gear-pinion pair has slightly smaller losses than a sum of two pinions when speed becomes larger than a critical value. This modification of WPL evolution is so far not well understood. Both numerical and experimental methods pointed out this phenomenon; however, they disagree on the speed value when it occurs (i.e. 100 Hz experimentally and less in numerical predictions). It will be then interesting in future works to modify the gears geometry and see if the gear-pinion pair has again slightly smaller losses than a sum of two pinions. If so the critical speed value should be evaluated. Moreover its dependence on some geometry of the gears should be investigated. For that other experimental data or numerical predictions using other configurations are needed.
References
Dawson PH (1984) Windage loss in larger high-speed gears. Proc. I. Mech.E.Power and Process Eng, vol 198
Anderson NE, Lowenthal SH, Stuart H (1980) Spur gear systems efficiency at part and full load. NASA Technical Paper, vol 1622
Townsend D, Dudley DW (1992) Gear Handbook. McGraw-Hill, New York, p 1010
Lord AA (1998) An Experimental Investigation of Geometric and Oil Flow Effects on gear Windage and meshing Losses. PhD Thesis. Swansea: University of Wales
Diab Y, Ville F, Velex P, Changenet C (2004) Windage losses in hugh-speed gears—Preliminary experimental and theoretical results. J Mech Design. https://doi.org/10.1115/1.1767815
Voeltzel N, Marchesse Y, Changenet C, Ville F, Velex P (2016) On the influence of helix angle on gear windage losses. J Mech Eng Science 230:1101–1112
Johnson G, Simmons K, Foord C Experimetal investigation into windage power loss from a shrouded spiral bevel gear. Proceedings of ASME Turbo Expo 2007: Power for Land, Sea and Air, Montréal. https://doi.org/10.1115/GT2007-27885
Winfree DD (2000) Reducing gear windage losses from high speed gears. Proc ASME Power transmission and Gearing conference, Baltimore
Simmons K, Johnson G, Wiedemann N (2011) Effect of pressure and oil mist on windage power loss of a shrouded spiral bevel gear. Proc ASME Turbo Expo, Vancouver
Arisawa H, Nishimura M, Imai H, Goi T (2014) Computational fluid dynamics simulation and experiments for reduction of oil churning loss and windage loss in aeroengine tranmission gears. J Eng Gas Turbines Power. https://doi.org/10.1115/1.4026952
Al-Shibl K, Simmons H, Eastwick CN (2006) Modelling windage power loss from an enclosed spur gear. J Power Energy. https://doi.org/10.1243/09576509JPE344
Chaari F, Ben Romdhane M, Baccar W, Fakhfakh T, Haddar M (2012) Windage power loss in spur gear sets. Wseas Trans App Theo Mech 2:159–168
Pallas S, Marchesse Y, Changenet C, Ville F, Velex P (2013) Application and validation of a simplified numerical approach for the estimation of windage power losses in spur gears. Comput Fluids 84:39–45
Concli F, Gorla C, Della Torre A, Montenegro G (2014) Windage power losses of ordinary geras: different CFD approaches aimed to the reduction of the computational effort. Lubricants 2:162–176
Concli F, Gorla C (2016) Numerical modeling of the power losses in geared transmisions: windage, churning and cavitation simulations with a new intergrated approach thta drastically reduces the computational effort. Tribol Int 103:58–68
Burberi E, Fodelli T, Andreini A, Facchini B, Cipolla L (2016) CFD Simulations of a meshing gear pair. ASME Turbo expo: Power for Land, Sea and Air, Seoul
Massini D, Fondelli T, Andreini A, Facchini B, Tarchi L, Leonardi F (2018) Experimental and numerical investigation on windage power losses in high speed gears. J Eng Gas Turbines Power. https://doi.org/10.1115/1.4038471
Ruzek M, Ville F, Velex P, Boni J-B, Marchesse Y (2019) On windage losses in high-speed pinion-gear pairs. Mech Mach Theory 132:123–132
Menter FR (1994) Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J 32:1598–1605
Pallas S, Marchesse Y, Changenet C, Ville F, Velex P (2012) A windage power loss model based on CFD study about the volumetric flow rate expelled by spur gears. Mech Ind 13:317–323
Hill MJ, Kunz J, Noack RF, Long W, Morris PJ, Handschuh RF (2008) Application and validation of unstructured overset CFD technology for rotorcraft gearbox windage aerodynamics simulation. Proc. 64th American helicopter society annual forum, Montreal
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ruzek, M., Marchesse, Y., Ville, F. et al. Windage power loss reductions in high-speed gear pairs. Forsch Ingenieurwes 83, 387–392 (2019). https://doi.org/10.1007/s10010-019-00336-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10010-019-00336-7