
Abstract
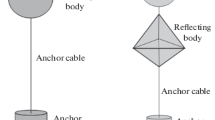
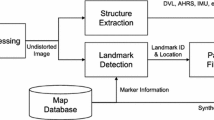
This study presents a localization system using visual information for guidance and navigation of a biomimetic autonomous underwater vehicle (BAUV). The BAUV tracks a mooring cable using two cameras and sonar. Sonar has good accuracy in detecting longitudinal distances but is poor in detecting lateral distances. Since a stereo image has quantization errors, for the cameras, measurement errors in lateral directions are less than those in the optic-axis direction. An extended Kalman filter was employed to combine observational information derived from the cameras and sonar of the mooring cable position with the navigation data of the BAUV. This work demonstrates, using water tank experiments, the effectiveness of the proposed tracking technique in decreasing uncertainty in position estimations of the BAUV and mooring cable.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Howe BM, McGinnis T, Boyd ML (2007) Sensor network infrastructure: moorings, mobile platforms, and integrated acoustics. In: Proceedings of the symposium on underwater technology. IEEE, Tokyo, pp 47–51
Guo J, Chiu FC, Chen CC, Ho YS (2003) Determining the bodily motion of a biomimetic underwater vehicle under oscillating propulsion. In: Proceedings of the IEEE international conference on robotics and automation. IEEE, Taipei, pp 983–988
Guo J (2006) A waypoint-tracking controller for a biomimetic autonomous underwater vehicle. Ocean Eng 33:2369–2380
Miura J, Shirai Y (1997) Vision and motion planning for a mobile robot under uncertainty. Int J Robot Res 16(6):806–825
Moon I, Miura J, Shirai Y (1999) On-line viewpoint and motion planning for efficient visual navigation under uncertainty. Robot Auton Syst 28:237–248
Davison AJ, Murray DW (2002) Simultaneous localization and map building using active vision. IEEE Trans Pattern Anal Mach Intell 24(7): 865–880
Guo J, Tsai JF, Chiu FC, Lee YJ (2007) Optimal measurement strategies for target tracking by a biomimetic underwater vehicle. In: Proceedings of the 17th international offshore (ocean) and polar engineering conference. The International Society of Offshore and Polar Engineers, Lisbon
Williams SB, Newman P, Dissanayake G, Durrant-Whyte H (2001) Autonomous underwater navigation and control. Robotica 19:481–496
Guo J, Joeng YJ (2004) Guidance and control of a biomimetic-autonomous underwater vehicle using body-fin propulsion. J Eng Mar Environ 218:93–111
Carlson NA (1990) Federated square root filter for decentralized parallel processes. IEEE Trans Aerospace Elect Syst 26(3):517–525
Matthies LS, Shafer A (1987) Error modelling in stereo navigation. IEEE J Robot Autom 3(3):239–248
Benet GM, Blanes F (2005) Differentiating walls from corners using the amplitude of ultrasonic echoes. Robot Auton Syst 50:13–25
Author information
Authors and Affiliations
Corresponding author
About this article
Cite this article
Guo, J. Mooring cable tracking using active vision for a biomimetic autonomous underwater vehicle. J Mar Sci Technol 13, 147–153 (2008). https://doi.org/10.1007/s00773-007-0263-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-007-0263-8