
Abstract
Recent discrete fracture network (DFN) related analysis of a number of block caving projects has demonstrated the role that the 3D volumetric fracture intensity measure (P32) plays on controlling a number of rock mass properties critical to caving operations. P32 represents the fracture area per unit volume and as such represents a non-directional intrinsic measure of the degree of rock mass fracturing, incorporating both a frequency measure and a fracture size component. Preliminary results suggest that the P32 intensity of a DFN model would strongly control the overall fragmentation of the rock mass. The implication would be that by taking the overall distribution of P32, the in situ fragmentation of a large rock mass volume could be determined in a computationally efficient way. With P32 also being shown to be one of the dominant controls on DFN derived directional stiffness measures, increasingly these DFN related work flows are being shown to be central to an improved rock mass characterisation process and ultimately the more accurate capturing of the caving process.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Determining the likely distribution of rock mass fragmentation is one of the most critical elements in cave mining, due to the impact that poor or unexpected fragmentation can have upon cave operations. As discussed in (Rogers et al. 2010), the use of discrete fracture network (DFN) methods can assist in the fragmentation assessment, including the natural in situ, primary and secondary fragmentation. To date the evaluation of primary and secondary fragmentation has been mostly carried out using alternative methods based on engineering principles and practical experience (e.g. Esterhuizen 1994). More recently, synthetic testing of DFN models has been proposed to assess fragmentation mechanisms (Rogers et al. 2010; Elmo et al. 2008).
However, it is argued that neither of these approaches can fully capture the broader heterogeneity of the rock mass, drawing on only a limited portion of the rock mass characterisation data. Recent work has demonstrated the sensitivity of rock mass fragmentation to the volumetric fracture intensity property P32 and the importance of determining the critical intensity value at which the transition from intact massive rock mass to kinematically mobile rock mass occurs. The P32 property represents the fracture area per unit volume and as such represents a non-directional intrinsic measure of the degree of rock mass fracturing, incorporating both a frequency measure and a fracture size component (Dershowitz et al. 1998; Dershowitz and Herda 1992). This is a property that once calculated can be spatially modelled to provide a constrained block model property of fracture intensity at the mine/cave scale.
The authors have developed an approach that has at its core the development of a full-scale DFN description of fracture orientation, size and intensity built up from all available geotechnical data. The model fully accounts for a spatially variable description of the fracture intensity distribution. Primary fragmentation analysis is undertaken using a DFN based rule approach, which draws from an explicit numerical simulation of fracture mechanisms to characterise stress-induced fracturing within a given rock mass as a function of its initial P32 distribution.
This paper initially outlines the DFN approach and the origin of the P32 property, then emphasizes is given to the derivation of spatially located P32 values through a mine volume and spatially built models to provide a block model of fracture intensity. Examples are also given of the applications of P32 and how this property could further our understanding of the rock mass characterization process and pre caving assessments. As discussed in the paper, the P32 intensity of a DFN model strongly would be related to a range of geomechanical properties such as fragmentation, mean block size and stiffness. Therefore, by deriving P32 values, predictions of these other properties could be made with reference to the underlying distribution of P32. It is anticipated the proposed approach could provide for a computationally efficient way of addressing these rock engineering questions in large volumes with high numbers of fractures.
2 The DFN Approach to Fracture Modelling
The DFN approach is a modelling methodology that seeks to describe the rock mass fracture system in statistical ways by building a series of discrete fracture objects based upon field observations of such fracture properties as size, orientation and intensity.
The DFN approach is being used increasingly to address a range of geomechanical problems when engineering or excavating large structures in fractured rock masses: from large open pit slopes (Rogers et al. 2009), block caves (Rogers et al. 2010), tunnel excavations (Rogers et al. 2006) to the generation of synthetic rock mass (SRM) properties (Elmo and Stead 2010; Pierce et al. 2007; Sainsbury et al. 2008).
The DFN approach to rock mass modelling has a number of advantages over more conventional methods particularly in that they are better able to capture the local scale heterogeneity than larger scale continuum approaches. This is achieved explicitly describing key elements of the fracture system. Most importantly they provide a clear and reproducible route from site investigation data to modelling because real fracture properties are being preserved through the modelling process.
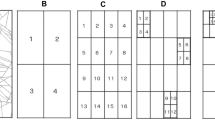
A clear shortcoming of any investigation of a fractured rock mass is the limited exposure gained from drilling and even mapping in terms of the 3D distribution of fractures and how they extend away from the sample (either borehole or mapping). How the observed data are considered to extend into the rock mass can result in very different outcomes, particularly in terms of block size distribution, see Fig. 1. DFN methods seek to avoid this issue by considering distributions of fracture properties from the total population and, therefore, the likelihood of occurrence of an outcome.

Impact of length assumptions on the block forming potential of a rock mass. a Inclined borehole with fractures intersecting borehole indicated (i.e. raw input data), b fractures extrapolated to maximum extent permitted resulting in a high number of blocks being formed and c fractures given variable lengths or allowed to terminate on other fractures resulting in far fewer and larger blocks being formed
In order to build a simple DFN model, the primary fracture properties of orientation, fracture size, intensity and its local spatial variation are required to be defined as distributions to allow the stochastic generation of a large number of fracture elements that represent the fracture network (Rogers et al. 2009). The overall workflow for developing larger scale DFN models is documented elsewhere (Dershowitz et al. 1998; Rogers et al. 2009). This paper focusses mainly on the derivation of volumetric fracture intensity properties, their spatial modelling through the cave volume and their subsequent use.
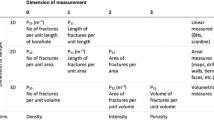
A fracture intensity classification scheme has been developed to remove some of the ambiguities of terminology and to provide an easy framework to move between differing scales and dimensions known as the P ij system (Dershowitz et al. 1998). The P ij system seeks to define fracture intensity in terms of dimensions of the sample (e.g. 1D Borehole, 2D trace map, 3D volume) and dimensions of the measure (e.g. dimensionless count, 1D length, 2D area, etc.). As an example, P10 (or fracture frequency) is a one-dimensional sample and has a zero dimension measure (count), Table 1.
The fracture intensity input for DFN modelling and in the particular case of caving operations typically comes from borehole data (either fracture logging or borehole imaging tools) as fracture frequency (P10, U m−1). However, trace mapping upon surfaces such as benches or tunnel walls (P21, U m/m2) can also be used. Both of these data are directionally biased and sensitive to the orientation of the sampling object (borehole, mapping surface, etc.) and the orientation of the intersecting fractures. Within DFN modelling, the preferred measure of fracture intensity is known as P32 (fracture area/unit volume, U m2/m3) as this represents a non-directional intrinsic measure of fracture intensity. Whilst P32 cannot be directly measured, it can be calculated from either P10 or P21 measurements either by simulation or using analytical solutions. Conceptualizing what P32 actually means can be quite challenging unlike more conventional fracture intensity measures such as fracture frequency. In order to help the reader, a series of small DFN models have been constructed for a range of differing P32 values, Fig. 2. Additionally, the resultant P10 (fracture frequency) and also block size are shown. These DFN models are all constructed within a 1-m cube volume such that the P32 value refers directly to the fracture area within the model.

Illustration of the key relationships between P32 (volumetric fracture intensity), borehole fracture frequency and fragmentation for a DFN model 1 m3 in size. The top images represent DFN models for increasing P32 values, the second row represents simulated core runs 1 m long through the DFN and the bottom row represents identified blocks, coloured by volume
In addition, in the DFN the platform used in the current analysis allows the 3D visualization of blocks defined by intersecting discontinuities in the DFN model by employing an implicit cell mapping algorithm optimised to provide an initial estimate of the rock natural fragmentation. As discussed in Elmo and Stead (2010), the cell mapping algorithm works by initially identifying all the fracture intersections with the specified grid elements. This results in a collection of grid faces and connection information, which is then used to construct a Rock Block of contiguous grid cells.
Figure 2 shows that at low values of P32, there are few fractures, a few intersections on the simulated borehole and few large blocks within the modelling volume. At higher values of P32, there are lots of fractures, a high number of intersections on the simulated boreholes and also a high number of blocks of increasingly small size. The relationship between the modelled P32 and resultant P10 as measured on the simulated boreholes is shown below in Fig. 3.

Relationship between P32 and P10 as derived from the above simulations in Fig. 2
3 Deriving P32 Values for Cave Scale Modelling
The most important aspect of cave scale DFN modelling is the development of an accurate 3D model of the variation of fracture intensity. The ultimate objective of DFN model generation is to create an accurate description of the P32 variation through the cave volume as this has been shown to be key to understanding variations in the in situ fragmentation and overall rock mass quality.
As mentioned previously, the primary input for fracture intensity modelling at the cave scale is borehole derived fracture frequency (P10) data. A method is required that will identify zones of the rock mass where P10 remains constant over intervals lengths of around 10–100 m. The best way to achieve this is by using cumulative fracture intensity (CFI) plots for all geotechnical boreholes. A CFI plot shows depth on one axis and the cumulative fracture frequency of open fractures on the other, Fig. 4. Where the gradient of the CFI curve is relatively constant, the fracture frequency (P10) over that interval is constant and can be determined from the gradient of the line. The interpretation approach means that data from a borehole say 600 m long can be reduced into between about 6–12 intervals of approximately constant P10. By repeating this method for all available geotechnical boreholes, a large data set of spatially located P10 values can be generated in space.

Example of cumulative fracture intensity (CFI) plot showing interpreted intervals of constant fracture frequency (P10)
This data set of P10 values for intervals in the 10–100 m range comprises directionally biased samples, with the actual intensity being dependent upon the orientation of the borehole samples and the orientation of the fracture orientation distribution. To address this, an analytical solution was developed that allows P10 intensity values to be converted to the non-directional intensity property P32 (Wang 2006). This approach calculated the coefficient C31 (for converting P10–P32) as a function of the sample (borehole) orientation, the fracture orientations and dispersion around the mean pole. C31 values are calculated for every interpreted P10 interval on the boreholes of interest. This step allows the generation of borehole logs of P32 fracture intensity to be generated which provide the starting point for any 3D spatial modelling and extrapolation of fracture intensity through a large rock mass such as a cave volume.
4 Spatially Modelling the P32 Distribution Through the Cave Volume
Geostatistical methods can be used to interpolate these P32 values through the cave volume and surrounding rock mass. The main steps of the overall workflow for the geostatistical modelling of P32 are as follows:
-
derive P32 logs for all boreholes;
-
upscale these logs into the modelling grid:
-
perform variography upon these upscaled logs; and
-
block model the P32 property through the cave volume using the derived variograms.
The first step in the block modelling of P32 is to load the derived P32 logs onto the boreholes, Fig. 5.

Acoustic tele viewer (ATV) logged boreholes used for geostatistical interpolation coloured by P32
The P32 logs then need to be upscaled into equivalent cellular values in the modelling grid (see Fig. 6). Here all of the cells intersected by the boreholes (plus neighbours) have an average P32 value calculated for them. Having transformed the raw P32 data to the upscaled log format, these data can now be spatially modelled using conventional variography.

Upscaled P32 values used for geostatistical modelling. The colour scale is the same as the previous figure
Based upon an analysis of the fracture data, the main structural trends of a rock mass should be used to define the principal directions for use in the data modelling. The variograms generated are then used to generate a block model property of P32. Depending upon the nature of the rock mass, the spatial modelling may wish to take into account to the underlying geotechnical domain rather than simply distributing the P32 values through the rock mass, based solely on the variography.
A number of different techniques exist for carrying out the actual spatial modelling used to generate the block model. Typically this might be Kriging, providing the best linear unbiased estimation. Whilst Kriging does provide the best estimate, it also significantly reduces the variance of the data such that the distribution of P32 values within the model is less representative as well as producing a less geological looking property model. In order to better preserve the overall variance of the source data and to produce a property that appears more geologically realistic, a sequential Gaussian simulation (SGS) approach is preferred, Fig. 7.

Cave scale block model of P32 fracture intensity, and hot colours represent higher P32. This model represents the geometric mean of five realisations
This is a critical component of this modelling approach as it is the distribution of P32 we want to preserve rather than just modelling specific P32 values. To remove some of the less likely outcomes of the modelling, the average of a number of realisations can be taken. This reduces the variance slightly whilst preserving the geological feel of the model, Fig. 7. This also shows the variance of the original data, one realisation and the mean of five iterations.
The modelled P32 property provides the basis for all the ongoing fragmentation analysis. Not only does this property control rock mass fragmentation but it also strongly influences overall rock quality, rock mass stiffness and even permeability. As such the applications of this block model are considerable.
5 In Situ Fragmentation Determination
With these block model descriptions of the variation of fracture intensity, it is possible to build large DFN models at the cave scale. However, detailed mapping of in situ blocks within a large discrete model is computationally highly challenging as it presents a complex geometrical problem. To overcome these challenges an approach has been developed that allows replication of the in situ fragmentation description for large models without the need to simultaneously search through that large volume, resulting in an approach that is far more flexible and efficient.
The starting point is to take the P32 block model property that has been calculated for the cave volume and to extract the distribution of P32 for each specific cave panel or geotechnical domain of interest. Histograms of the P32 distribution are then generated for these domains and provide the target to reproduce in the subsequent analysis. Figure 8 shows the P32 distribution for two cave panels (named Cave 1 and Cave 2) within a real cave project (reference upheld due to confidentially terms).

Distribution of P32 for two differing panels showing the difference in the modelled P32
The next step is to build DFN models of the rock mass at around the scale of approximately one cell of the block model for the range of P32 values observed in the domain of interest. To avoid potential edge effects, the DFN models are initially generated within a 50 × 50 × 50 m region. A sub set of the model is then used for the fragmentation search within a region with an edge length in the order of 10–25 m (i.e. 1,000–15,625 m3 range). The orientation data typically comes from ATV logs or orientated core and the fracture size distribution is determined using underground mapping data. Once these DFN models are built, the in situ fragmentation of the rock mass can be mapped in detail for the sub set of the model using the methodology described in (Rogers et al. 2010), Fig. 9.

Determination of the in situ fragmentation of a DFN model for certain P32 fracture intensity (a) with the in situ blocks mapped (b)
The external boundaries of the model are considered as fractures for the purpose of block formation, such that the total volume of blocks always stays constant, independently of the assumed fracture intensity. This assumption is equivalent to passing a given mass of rock material through a series of sieves. If the external boundaries were not included in the fragmentation process, the total volume of blocks formed would increase with increasing P32 intensity. When performing a size distribution analysis, it is argued that changing the total volume of blocks formed would affect the standard volume weighted fragmentation curves, resulting in the curves moving to the right (coarser), even though the blocks might have become smaller on average.
Once all the models have been generated, a family of fragmentation curves can be compiled for each P32 value analysed. The overall fragmentation distribution for a particular cave or domain can then be calculated by combining the different fragmentation curves from each P32 model, weighted according to the distribution of observed P32 values for the selected cave or domain, Fig. 10.

Fragmentation curves as a function of P32 and in situ curves for cave 1 and cave 2 derived from the weighted average of the individual P32 curves
Figure 10 shows the weighted fragmentation curves for two separate domains (Cave 1 and Cave 2) that have been calculated based on the distribution of P32 values shown in Fig. 8, including also the size distribution curves corresponding to each independent P32 intensity values.
In the early life of a mine project with only limited geotechnical drilling, a similar fragmentation analysis can be carried out. This involves deriving the P32 based fragmentation curves and calculating the weighted in situ fragmentation curves, rather than carrying out the fragmentation analysis for the entire spatially modelled P32 distribution across the mine scale DFN model. Accordingly, the weighted in situ fragmentation curves are based upon the distribution of P32 values derived from available borehole data set.
By taking the results of these fragmentation curves, a relationship between a certain percent passing (e.g. P80 block volume) and P32 can be derived. This allows the P32 block model to be converted into a P80 block volume description, Fig. 11 (the relationship used to generate the block model of P80 is shown in the top right of Fig. 11).

Conversion of the P32 property into a P80 block volume property based upon the relationship from the inset figure top right. Green lines represent major mine infrastructures and access points
5.1 P32 and Block Forming Potential
Another observation about the usefulness of P32 has been in understanding the block forming potential of a rock mass as a function of its fracture intensity. The conventional approach to fracture characterisation often assumes fractures are ubiquitous and infinite. This results in the over prediction of fracture connectivity and, therefore, the degree to which a rock mass will comprise well defined in situ blocks.
If the fragmentation modelling with the small-scale models are repeated for a range of P32 fracture intensities, but this time not making the outer boundary be considered as a fracture, we can determine the percentage of the total volume comprising in situ blocks (for that specific rock mass) as a function of P32, Fig. 12.

Block forming potential of a specific rock mass as a function of P32, showing the transition from massive rock mass to a more kinematically controlled blocky rock mass one at higher levels of P32
The results would suggest that at relatively low P32 (e.g. <2 m2/m3) the rock mass would be massive, and accordingly the rock mass strength would be dominated largely by the presence of the intact rock bridges. Conversely, at relatively high P32 values (e.g. >4.5 m2/m3), the rock mass would be blocky to very blocky, with well-defined potentially mobile blocks and joint properties dominating the rock mass strength.
It is interesting to note that the conversion from rock-bridge dominated rock mass to kinematic rock mass appears to occur over a relatively small change in P32. The percentage volume occupied by blocks rapidly jumps from <10 to >90 % over a relatively small change in fracture intensity (between 1.5 and 4.0 m2/m3). These observations are obviously important with respect to in situ block formation. During caving operations, the induced stresses may be sufficient to break the intact rock bridges ensuring the rock mass is converted to a mobilised kinematic assemblage. Early results suggest that primary fragmentation damage tends to occur more where the fracture intensity is low (e.g. Rogers et al. 2010).
5.2 Assessment of Hydraulic Fracturing Impact on In Situ Fragmentation
A large-scale block or panel cave mine constitutes an example of a high volume rock-factory, whose success and viability are dependent to a large extent on the caveability of the deposit and the fragmentation of the ore material. To help mitigate the risks associated with unfavorable cave propagation and fragmentation in stronger or less fractured rock masses, pre-conditioning through hydraulic fracture generation or blasting is increasingly being used. Considerable faith is being put in the value of these pre-conditioning methods for de-risking critical aspects of block caving mining such as cave initiation, propagation and fragmentation. However, quantification of the impact of pre-conditioning is difficult and much of the data obtained to date are anecdotal.
Several authors (Mahtab et al. 1973; Kendorski 1978) have recognised that the fracture system most favourable for caving includes a well-developed low dipping joint set and at least two prominent sub-vertical joint sets. Propagating sub horizontal hydraulic fractures in a rock mass prior to caving, therefore, represents a valid pre-conditioning technique to improve rock mass caveability. Obviously the in situ stress field is one of the primary controls on hydraulic fracture orientation with fracture generation being in the plane of σ 1 and σ 2. Extensive preconditioning is carried out from closely spaced boreholes with typical hydraulic fractures expected to have a radius in the range of approximately 20–40 m, see Fig. 13.

a Pre-conditioning borehole configuration through cave volume and b simulated hydraulic-fracture array on those boreholes
Operational, design and rock mechanics reasons ensure that hydraulic fracture generation from each pre conditioning borehole does not follow a regular spacing. This results in their being a distribution of additional fracture area being imposed into the rock mass volume. Therefore, when considering the impact of preconditioning on in situ fragmentation, both the distribution of in situ fracture P32 and the distribution of preconditioning P32 need to be considered. Calculating the range of hydraulic fracture P32 can be determined by considering the definition of P32. For instance, in a 25-m cell, a fully cutting single hydraulic fracture would have a P32 of approximately 0.04 m2/m3 (252/253). With intensive preconditioning with a small hydraulic fracture spacing (e.g. 1.25 m), this would result in a total cell P32 of approximately 0.80 m2/m3. These two scenarios, therefore, define the two end members for the range of P32 values. Therefore, if natural fracture DFN models with a range of typical P32 values are generated with a range of differing hydraulic fracture DFN model P32 values, then a relationship can be established that allows the fragmentation of rock mass to be determined as a function of the natural fracture P32 and the induced hydraulic fracture P32, Fig. 14.

Combining different natural fracture P32s and different hydraulic fracture P32s to determine the overall impact of preconditioning on in situ fragmentation. All models are of dimension 25 × 25 × 25 m
Determining the in situ fragmentation of these hybrid natural-hydraulic fracture models then follows the same methodology described above and allows a relationship to be developed between natural fracture P32, hydraulic fracture P32 and a measure of block volume, typically taken as the P50 or P80 block volume. Figure 15 below shows the fragmentation of two different natural fracture P32s for increasingly intensive hydraulic fracturing.

Fragmentation of two different natural fracture P32s for increasingly intensive hydraulic fracturing
Each model to the right represents increasing hydraulic fracture intensity. The upper models represent a natural fracture P32 of 2 m2/m3 and the mean block size is clearly seen to be reducing from left to right with increasing hydraulic fracture intensity. The lower models represent a natural fracture P32 of 5 m2/m3 and the mean block size appears to be independent of the assumed level of hydraulic fracturing. For a rock mass with a natural fracture P32 of 2 m2/m3 and a hydraulic fracture intensity of 0.8 m2/m3, there is an 11-fold reduction in P80 volume (220 reduced to 19.6 m3). For a rock mass with a P32 of 5 m2/m3, the P80 reduction is only a 1.6 times (2.4 reduced to 1.5 m3). Thus, once the natural fragmentation results in limited larger blocks, it is expected that no amount of additional pre-conditioning will significantly impact the overall fragmentation curve. The analysis has assumed that all hydro-fractures are fully extending and the interaction between hydro-fractures and in situ fractures has been ignored. In reality this may not be the case, with the in situ fractures potentially stopping the growth of hydro-fracture extension or providing conductive pathways allowing the leaking off of pressure and reducing ultimate fracture length.
The results obtained from the simulations above allow for a relationship to be developed between the in situ P32 and the P50 block volume and also the impact of a certain level of preconditioning upon the mean block volume. This is illustrated in Fig. 16. This graph shows the relationship between P50 block volume on the vertical axis and P32 intensity along the bottom. The upper line represents the relationship for natural fracture intensity, whereas the lower line represents the relationship for a certain natural fracture intensity plus the maximum modelled impact (P32 = 0.8 m2/m3) of hydraulic fractures. The red arrows illustrate the fact that a natural fracture DFN with a P32 = 2 m2/m3 plus a hydraulic fracture intensity of 0.8 m2/m3 has the same fragmentation as a DFN model simply with a P32 of 2.8 m2/m3. Therefore, the impact of hydraulic fracturing on natural fractures appears to be purely additive, which means the impact can reasonably be mapped and determined within the DFN model.

Relationship to be developed between in situ P32 and the P50 block volume, including the case with preconditioning hydraulic fractures
As can be seen from Fig. 16 above, there is a discernible reduction in the overall in situ fragmentation as a result of the pre-conditioning. The mean particle size is reduced from a size of 3 m3 to a post pre-conditioning size of 2.5 m3 with a 2.5 m spacing and 2.25 m3 with 1.25 m spacing. As is to be expected, the pre-conditioning is seen to be affecting primarily the larger block sizes. One of the main impacts observed in the modelling is the decrease in the proportion of large residual blocks and a measurable increase in the proportion of the rock mass mobilised into kinematic blocks. Obviously, it is probable that many residual rock mass blocks will break up upon caving. However, (Elmo et al. 2010) showed that under certain stress conditions, large strong residual rock mass blocks can exist intact within the cave volume for considerable time/distance. Therefore, any reduction in the proportion of residual blocks will have a positive impact on reducing hang ups and other material handling problems.
6 Primary Fragmentation and Fracture Intensity
Primary fragmentation is considered the rock breakage that occurs during caving but prior to dislocation into the cave pile. Detailed and explicit modelling of the primary fragmentation processes at a mine scale is again computationally challenging. While continuum models can simulate the stresses in the cave, they are inherently incapable of directly simulating the fracturing processes associated with the induced stresses surrounding the cave. To overcome this challenge, a series of small cave scale models were developed utilizing plausible range of in situ P32 intensities such that the resultant primary fragmentation could be related back to the initial in situ P32 distribution.
In order to achieve this, the following steps were taken:
-
select an initial DFN model for which in situ fragmentation curves have already been generated;
-
extract 2D sections from the above DFN model and export these to the hybrid Finite/Discrete Element code ELFEN (Rockfield 2012) to explicitly simulate induced fracturing based upon relatively small scale (50 m wide undercut) caving models;
-
quantify the induced fractures in terms of resultant fracture intensity; and
-
repeat for a number of differing initial P32 values representing a range of possible outcomes (typically the 10, 50 and 90th percentile values of P32).
6.1 Fracture Geometry and Models Set Up
Relatively small-scale caving models were set up using the hybrid Finite/Discrete Element code ELFEN to simulate induced fracturing associated with the unloading of a 50-m wide roof span. The ELFEN code employs fracture mechanism principles to better capture the transition from continuum to discontinuous state typical of rock brittle failure. Examples of applications of ELFEN to characterise caving processes are given in (Elmo et al. 2010).
The unloading sequence is assumed to represent the effect of the cave back progressing upwards and is simulated by the removal of a 50-m wide undercut section, as shown in Fig. 17. 2D trace maps were selected in the DFN model and then exported into the ELFEN model to represent approximately the 10, 50 and 90th percentiles of the volumetric fracture intensity (P32) distribution. To account for the stochastic variability of the DFN model, the 2D trace maps were built such that additional fractures were superimposed to the base case (10th percentile intensity model) to represent the 50th and the 90th percentile intensity model. This way the models shared the overall influence of the natural fractures and potential anisotropic effects associated with re-generating the DFN model entirely (which would result in completely different trace maps without a common base) were not introduced in the analysis. In addition to the natural fractures, the modelling also considered the case in which hydro fractures spaced at 1.5 m were included in the models to simulate the effect of rock mass pre-conditioning.

Geometry for the 2D models considered to investigate and quantify the amount of induced fracturing associated with cave advance (primary fragmentation)
Primary fragmentation is then calculated as the amount of induced fracturing (P21 final minus P21 initial) that occurred in the model when the undercut level has displaced by approximately 1 m. Note that 1 m displacement is the caving threshold typically used in large-scale continuum models of caving to assess whether a given rock mass volume has caved (Elmo et al. 2010).
A key aspect of modelling the response of a jointed rock mass is to establish representative material parameters. A SRM approach is used to test the validity of the assumed intact rock and joint properties and to provide a calibrated model to be used for primary fragmentation analysis. The SRM approach requires a realistic representation of the mechanical behaviour of discrete fracture systems, either as individual entities or as a collective system of fracture sets, or a combination of both. 2D sections (20 m × 20 m) through the cave scale model DFN model are generated, including only fractures whose dip direction is within ±20º of the trace plane orientation to account for plane-strain conditions in the ELFEN model. To account for the geometrical variability associated with the stochastic nature of the DFN model generation, the 2D biaxial analysis has included 5 different DFN realisations for the 10th, 50th and 90th percentiles P32 fracture intensity of the cave scale DFN model. By running suitable biaxial (in 2D) test models of fractured rock masses, the SRM approach allows then to model equivalent Mohr–Coulomb or Hoek–Brown strength envelopes, including anisotropic effects.
In a discontinuum model with embedded DFN traces, the question arises as to which material properties to use for the characterisation of the rock bridges in between the pre-defined fractures. In an idealised model, with a relatively high density of simulated discontinuities representing the rock mass conditions in situ, it would be reasonable to assume these as being equivalent to the intact rock properties. Because the fracture intensity parameter used in the DFN model determines what portion of the natural occurring fractures will be modelled, not all fractures may be represented by the model, and, therefore, the unfractured rock in the model would actually have some degree of fracturing in the field. To represent this fracturing, the intact rock properties must be upscaled. When the discretisation process carried out within a discontinuum framework is such that the mesh size used in the model is in the centimetre range, it is argued that upscaled intact rock properties should be used to model the intact rock matrix. The amount of upscaling depends on the minimum mesh size used in the models with respect to the strength of laboratory samples, typically in the range of 50 mm. Further details on integrated ELFEN-DFN analyses are given in (Rogers et al. 2006), where it is demonstrated that the approach can effectively account for scale effects (i.e., reduction of rock mass strength with increasing sample size) without the need for upscaling the overall properties of the rock mass.
Material properties used in the current models are listed in Table 2, based on laboratory data (50 mm samples) scaled to 200 mm scale (mesh size used in the models).
Figure 18 shows the results of simulated 2D biaxial tests with lateral confinement in the range of 0–4 MPa. The results represent the average strength at increasing confinement for the five DFN realisations for each one of the 10th, 50th and 90th percentile fracture intensity models (P10, P50 and P90 in Fig. 18). The modelled results agree well with the assumed rock mass behaviour based on field estimates of GSI [Geological Strength Index; (Hoek et al. 1995)] and laboratory value of intact rock strength (MC segments 1 and 2). The modelled results show that GSI based rock mass strength estimates would, respectively, underestimate and overestimate the strength of a rock mass with a fracture intensity representing the 90th and 10th percentiles of the P32 distribution across the cave model.

Results for 20 m × 20 m rock samples with average simulated response for SRM models with jointing pattern corresponding to 10th, 50th and 90th percentile P32 fracture intensity (Here termed P10, P50 and P90, respectively). SRM model dimensions are 20 × 20 m. Estimated Mohr–Coulomb failure envelopes as a function of confinement are also indicated (MC segments 1 and 2)
The 2D biaxial SRM analysis shows that is not necessary to change any of the intact or joint properties used in the models to capture the different rock mass response, which is solely controlled by the varying fracture intensity of the embedded DFN traces.
6.2 Primary Fragmentation Simulation Results
The results of the small-scale caving simulations in terms of their initial fracturing, caving-induced fracturing and resultant block size for the 10th, 50th and 90th percentile P32 fracture intensity models (with and without hydraulic fractures) are shown in Fig. 19. What is clearly seen is that at a lower initial fracture intensity (P32) the impact of primary fragmentation is considerably higher as deformation is accommodated on intact rock bridges resulting in significant rock damage. However, at higher fracture intensities, the system becomes mostly joint-dominated, with stress applied to the sample being carried and/or transferred by the embedded fracture system rather than through the intact rock material resulting in less induced fracturing be generated.

2D trace maps used in the ELFEN model to represent the 10, 50 and 90th percentile, respectively, of the volumetric fracture intensity (P32) distribution induced fracturing from primary fragmentation simulations and resultant blocky volumes
Analysis of these images allow a relationship to be derived between the initial fracture intensity (P21 Initial) and the induced fracturing (P21 Final), Fig. 20. The ratio of P21 final to P21 initial decreases exponentially as models with increasing initial intensity P21 are considered. When the P21 intensity is transformed into a volumetric intensity, the results clearly show that the amount of caving-induced primary fragmentation is inversely related to the in situ P32 fracture intensity.

Relationship between initial and final fracture intensity P21 as a function of initial P21 for models with and without hydraulic fractures
Interestingly, the addition of the hydraulic fractures plays exactly the same role as that of natural fractures and the models respond purely as a function of overall additional fracture length within the models (i.e. total P21). This analysis can be used to derive a general formulation that allows us to calculate the expected leftward “shift” between in situ and primary fragmentation curves for a given initial P32 intensity, as a function of the applied stresses and rock mass properties, see Fig. 21.

The relationship between in situ and primary fragmentation curves for two different in situ P32 values. At low P32 values the effect of primary fragmentation is much higher (i.e. larger leftward shift in the curves) than for the higher one that shows only a marginal leftward shift
7 Summary
The DFN approach is a modelling methodology that seeks to describe the rock mass fracture system in statistical ways by building a series of discrete fracture objects based upon field observations of such fracture properties as size, orientation and intensity. Although much of the early interest in the DFN approach was associated with modelling of groundwater flow through natural fracture systems and for modelling fractured hydrocarbon reservoirs, the DFN approach is being increasingly used to address fundamental and practical geomechanical problems when engineering large structures in fractured rock masses.
This paper has shown that the DFN method has the potential to provide an alternative and effective method for studying rock mass fragmentation. The main advantage of the approach is that it relies on quantifiable field rock mass descriptors (fracture orientation, length and intensity) and provides genuinely realistic geometric models of fracture networks. It has been demonstrated that a DFN based analysis, and in particular the derivation of a spatial description of P32 through the cave or mine volume, provides a mechanism for predicting rock mass properties in the inter-borehole region. To date, efforts have primarily focused on deriving properties such as fragmentation by simply modelling a limited set of observed geotechnical data. However, it is the extrapolation of these observations using robust modern geostatistical methods that makes it possible to characterize the rock mass at a distance away from where the actual data were collected.
The DFN property P32 (or fracture area per unit volume) represents an intrinsic property with a number of parameters being directly or indirectly derived from its value. It makes inherent sense that the amount of fracturing (total surface area) within a volume should control or influence properties such as block formation, strength and stiffness. As shown in this paper, the in situ fragmentation of a rock mass can be critically related to P32; therefore, the knowledge of the distribution of the fracture intensity property P32 allows the efficient calculation of fragmentation distributions at a cave or mine scale.
Considering primary fragmentation and how the rock mass fragmentation responds to the caving induced stresses, simulations indicate that the amount of primary fragmentation that occurs within the cave is inversely correlated to the initial P32. Accordingly, this provides a mechanism to estimate the primary fragmentation distribution based on the size curves calculated for in situ fragmentation using the spatially distributed P32 block model.
The DFN approach has a number of key advantages over more conventional methods in that it is better at describing local scale problems because of its ability to capture the discrete fracture properties more accurately than larger scale continuum approaches and can also capture the heterogeneity of the fracture system by explicitly describing key elements of the system. Most importantly, a DFN based analysis provides a clear and reproducible route from site investigation data to modelling because real fracture properties are being preserved through the modelling process. The derivation and modelling of P32 through the mine volume do not replace more conventional rock mass characterisation process. However, moving forwards it is believed that the DFN and conventional methods will increasingly converge, providing exciting opportunities for better predictions and designs to be made.
References
Dershowitz WS, Herda HH (1992) Interpretation of fracture spacing and intensity. In: Proceeding of the 33rd US rock mechnical symposium, Santa Fe, NM
Dershowitz W, Lee G, Geier J, LaPointe PR (1998) FracMan: interactive discrete feature data analysis, geometric modeling and exploration simulation. User documentation. Golder Associates Inc., Seattle
Elmo D, Stead D (2010) An integrated numerical modelling—discrete fracture network approach applied to the characterisation of rock mass strength of naturally fractured pillars. Rock Mech Rock Eng 43(1):3–19
Elmo D, Vyazmensky A, Stead D, Rance J (2008) Numerical analysis of pit wall deformation induced by block-caving mining: a combined FEM/DEM-DFN synthetic rock mass approach. In: Proceedings of the 5th conference and exhibition on mass mining, Lulea, Sweden, June 2008, p 10
Elmo D, Rogers S, Beddoes R, Catalan A (2010) An integrated FEM/DEM—DFN synthetic rock mass approach for the modelling of surface subsidence associated with panel cave mining at the Cadia East Underground Project. In: 2nd int. symp. on block and sublevel caving. Perth, Australia
Esterhuizen GS (1994) A program to predict block cave fragmentation. Technical reference and users guide
Hoek ET, Kaiser PK, Bawden WF (1995) Support of underground excavations in hard rock. A.A. Balkena, Rotterdam 215 p
Kendorski FS (1978) The cavability of ore deposits. Min Eng 30:628–631
Mahtab MA, Bolstad DD, Kendorski FS (1973). Analysis of the geometry of the fractures in San Manuel Copper Mine, Arizona. US. Bur. Mines Rp. Invest., p 7715
Pierce M, Cundall P, Potyondy D, Mas Ivars D (2007) A synthetic rock mass model for jointed rock. In: 1st Canada-U.S. rock mechanics symposium, Vancouver, 2007, pp 341–349
Rockfield (2012) Rockfield Software Ltd. Technium, Kings Road, Prince of Wales Dock, Swansea, SA1 8PH, UK
Rogers SF, Moffitt KM, Kennard DT (2006) Probabilistic tunnel and slope block stability using realistic fracture network models. In: Proceedings of the 41st US rock mechanics symposium, Golden, CO
Rogers S, Elmo D, Beddoes R, Dershowitz B (2009) Mine scale DFN modelling and rapid upscaling in geomechanical simulations of large open pits. In: International symposium on rock slope stability in open pit mining and civil engineering. Santiago, Chile
Rogers S, Elmo D, Webb D, Catalan A (2010) A discrete fracture network based approach to defining in situ, primary and secondary fragmentation distributions for the Cadia East panel cave project. In: Proceedings of the second international seminar on block and sublevel caving, Perth, Australia, pp 425–440
Sainsbury D, Pierce M, Mas D. Ivars (2008). Analysis of caving behaviour using a synthetic rock mass—ubiquitous joint rock mass modelling technique. In: Proc. 1st Southern Hemisphere International Rock Mechanics Society symposium. Australian Centre for Geomechanics, Australia, Perth
Wang X (2006) Stereological interpretation of rock fracture traces on borehole walls and other cylindrical surfaces. PhD thesis, Virginia Polytechnic Institute and State University
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Rogers, S., Elmo, D., Webb, G. et al. Volumetric Fracture Intensity Measurement for Improved Rock Mass Characterisation and Fragmentation Assessment in Block Caving Operations. Rock Mech Rock Eng 48, 633–649 (2015). https://doi.org/10.1007/s00603-014-0592-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00603-014-0592-y