
Abstract
We have fabricated a pipette system driven by a carbon nanotube (CNT) electroactive polymer (EAP) actuator, equipped with commercially available two- and three-way solenoid valves and experimentally estimate the suction/discharge/dropping performance for pure liquid water. The droplets were reproducibly dispensed with an RSD % of less than 2 % in their volume. The pipetting precision is within the maximum permissible error defined by the ISO 8655 standard. This work shows an example of one of the practical uses of CNT-based actuators.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Automated pipette robots are generally used in medical facilities or laboratories to transfer liquid samples between preselected groups of containers such as PCR tubes (http://www.tecnorama.it/en/lab-dispensing/dosorama; http://www.zinsserna.com/lissy2002.htm). Commercially available pipette robots are able to perform various operations (collect, weigh, inject, etc.) on liquid samples or reagent by manipulating micro pipettes equipped. Other operations can be performed by installing additional actuator arm/sensor combinations, although this inevitably increases the size and complexity of the system. Taking a close look at a pipetting mechanism to handle liquid materials, well-established air displacement micropipettes have achieved widespread use. However, even these devices do not meet the recent requirements of point of care testing (POCT) or in situ analysis. POCT or in situ analysis requires characteristics that satisfy easy handling for user, low operating voltage and downward scalability.
Micro/nano-structured materials that can generate large amounts of mechanical energy, such as carbon nanotubes (CNTs), piezo ceramics (Nguyen and Truong 2004), and shape-memory alloys (Benard et al. 1998), have been developed and put into practical use. In particular, CNT actuators have several advantages over the materials currently in use. For example, they can perform more work per cycle than actuators based on conventional technologies and have much higher mechanical strength. Additionally, CNTs can be activated using a very low driving voltage of 1–3 V (Asaka et al. 2013), which for many applications is their greatest advantage. Other benefits include the direct conversion of electrical energy into mechanical energy with reducing energy loss, high actuation strain, high strength, and high elastic modulus. Finally, CNTs are light and durable. These features can be utilized in applications such as micro pumps, molecular motors, or nano robots. CNT actuators are also considered to be attractive candidates for a wide range of applications in fields such as medicine and robotics due to their low operating voltage, large bending amplitude, metal-free composition, and downward scalability.
AIST Kansai was the first to publish results on the development of so-called “dry” CNT-EAP actuators (Asaka et al. 2009, 2013; Sugino et al. 2009; Torop et al. 2014), whereas Fraunhofer IPA was the first to report a functional model demonstrating the applicability of those actuators in macroscale devices (Addinall et al. 2014). The first device resulting from a collaboration between these two institutes was a miniaturized CNT-EAP actuator pump (Fig. 1) (Addinall et al. 2014) into which the carbon nanotube actuator developed by AIST Kansai was integrated by Fraunhofer IPA with the help of finite element method simulations and printed circuit board (PCB) manufacturing methods (Fig. 1a, c). The device was based on the concept that if a small volume of air can be displaced by an integrated actuator when an external electrical voltage is applied, the change in volume (and thus pressure) within a connected channel (Fig. 2b, d) will enable the movement (sucking and release) of liquid.

CNT-based actuator pump. a Left to right CNT actuator, PCB cover, PCB base with flow channel, and actuator pump. b Dimensions of flow channel. c Schematic drawing of the pump. d Cross-sectional view showing the pumping scheme

CNT actuator driving pipetting system: a pump-valve combination, b flow controller
In this paper, we at AIST Shikoku describe the fabrication of a CNT-EAP actuator driven pipette system equipped with commercially available two- and three-way solenoid valves and experimentally estimate the suction/discharge/dropping performance for pure liquid water. The data obtained show that the device operates within the maximum permissible error defined by the ISO 8655 pipetting standard, by that the liquid discharge operated with the CNT actuator was controlled based on voltage characteristics (Kruusamäe et al. 2014) and the liquid discharge could be simply controlled by the applied voltage. This study demonstrates one of the practical applications of CNT-based actuators.
2 CNT actuator driving system
Figure 2 shows the (a) pump-valve system and (b) controller board constructed for monitoring the flow performance of the CNT actuator pump. The pump-valve system consists of a CNT actuator (SWCNT/PANI/PVDF-HFP/EMIBF4, 20 × 20 × 0.345 t mm (Sugino et al. 2012) and two- and three-way solenoid valves (FV-2-N1F (two-way) and EXAK-3 (three-way), Takasago Electric, Inc.) to control the discharge/suction characteristics. The controller section consists of an embedded single board computer (Arduino, ARD-NANO), motor driver (BD62xxF, Switch Science, Inc.), and transistor array (TD62003APG, Toshiba Corp.). The signal flow and air flow were designed as shown in Fig. 3 to simplify the actuator driving process. The CNT actuator and valves are controlled by the single board computer through the motor driver and transistor array, respectively. During suction (discharge), the three-way valve and a particular two-way valve are open while the CNT actuator is driven to shrink (or expand).

Flow diagram of CNT actuator driven pipetting system
3 Experimental setup
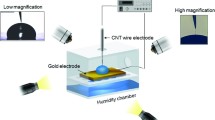
The experimental setup used to measure the flow during suction/discharge and dropping is shown in Fig. 4. The two-way valves are connected with 2-cm silicone tubing (LABORAN, ID × OD: 1.0 × 2.0 mm, AS ONE, Japan) to switching valves that are connected to the water supply. 15-cm silicone tubes are affixed to a base with an inscribed scale bar of 1 mm to measure the water displacement. 50 µL of pure water supplied via the switching valves (water inlet) is held in the 15-cm silicone tubes to measure the air pressure created by actuator ventilation. The flow pressure (positive/negative) generated by the CNT actuator can be indirectly measured by monitoring the water movement with a CMOS digital image sensor. This procedure allows us to obtain the exact air pressure as long as there is a certain minimum volume of water in the tube (note that the inertia resistance and surface friction between the water and tubing should be taken into account). To measure the volume of the water droplets produced, a polypropylene L-shaped nozzle (VFL106, ID × OD: 1.1 × 1.7 mm, AS ONE, Japan) used as a dispensing nozzle is connected to the end of the silicone tubing to produce a 90° turn downward. The distance between the tip of the L-shaped nozzle and a glass sample tray placed on an analytical balance (AG104, Mettler Toledo) was set as close to 2 cm as possible to avoid splashing.

Experimental setup for measuring ventilation performance
CNT actuators reportedly have a non-linear response to the magnitude and duration of the applied voltage (Kruusamäe et al. 2014). Therefore, the voltages applied to the actuators used in this study were set to within ±2.0 V to avoid non-linear operation.
4 Results and discussion
To investigate the pipetting performance of the CNT-based actuator pump, the water displacement d [mm] was measured for various applied voltage durations Δ t of 1–6 s. Figure 5 shows the water displacement during discharge and suction as a function of Δ t, where the data points and error bars are the average and standard deviation calculated from 10 replicate measurements, respectively. The displacement monotonically increases with Δ t, and the displacement during suction was 78 % of that during discharge. For discharge, the error in the displacement increases with Δ t, possibly because residual pressure accumulated inside the three-way valve, particularly during discharge. The residual pressure should be released via valve switching through a software command when it becomes significantly high. The flow efficiency can be estimated from a plot of average flow velocity v (mm/s) vs. Δ t, the graph (Fig. 6) of which is a smooth curve that peaks at approximately 4.0 mm/s (discharge) and 3.2 mm/s (suction) at 4.0 s. The flow velocity gradually decreases by 8 % between 4 and 6 s after a remarkable increase from 1 to 4 s. Furthermore, if we consider the water displacement per second of applied voltage (Δ t 1 ), the period between 1 and 2 s (Δ t 1 (1–2) ) shows the maximum displacement of 5.2 mm during discharge (Fig. 7). The displacement vs. voltage characteristics seem to agree with previous experimental data obtained by AIST Kansai (Kruusamäe et al. 2014), which indicate that the peak of actuator bending occurs between 4 and 6 s, after the maximum increase between 1 and 4 s.

Average water displacement and flow volume as a function of applied voltage duration

Average flow velocity as a function of applied voltage duration

Average flow distance for one second intervals of applied voltage
The measured displacement [mm] can be converted to water volume V [µL] using the dimensions of the silicone tube. The pressure force F [Pa] can be also calculated using acceleration a, mass m, and the cross-sectional area S of the liquid water using the general equation:
The water displacement, calculated volume, and air pressure are summarized in Table 1. The CNT actuator pump was found to produce very low pressures because the actuator deformation was unavoidably limited due to the actuator being sandwiched between the PCBs (Fig. 1). It was therefore difficult to weigh the water that was sucked from the L-shaped nozzle, because it leaked from the nozzle due to gravity during suction.
To determine the optimum applied voltage for droplet formation, the maximum volume of a single droplet created on the L-shaped nozzle was measured. It was therefore confirmed that the volume of the droplet dispensed from the nozzle was less than 23 µL for slow discharge. A droplet experiment was performed based on the results described above in such a way that a single droplet dispensed from the L-shaped nozzle was weighted by analytical balance. In order to dispense a 23-μL single droplet on the tip, we used a combination of two four-second cycles, which corresponds to 12.6 µL (Table 1) per cycle. Under these conditions, 10 droplets dispensed from four of the aforementioned L-shaped nozzles, denoted N1–N4, were weighed using an analytical balance. The results are shown in Fig. 8 and summarized in the table inset. Each of the 10 dots in Fig. 8 correspond to a droplet volume calculated from the droplet mass measured using the analytical balance. The rectangular bars with an error bar represent the averages of the data obtained for each nozzle. The droplets were confirmed to be reproducibly dispensed by each nozzle in accordance with the desired condition, i.e., the droplets only fell from the nozzle tip when they exceeded 23 µL. It should also be emphasized that the RSD % of the droplet volume is less than 2 % for every nozzle. Therefore, pipetting can be performed with precision that satisfies the ISO 8655 standard using the CNT actuator based device, even though the ejection cycle is very slow (1 droplet per 8 s).

Droplet volume using CNT actuator for four nozzles
5 Conclusions
We have fabricated a pipette system driven by a CNT actuator and demonstrated reproducible droplet formation for practical applications. The CNT actuator requires an applied voltage of only 2.0 V to create an air pressure sufficient for liquid discharge/suction and droplet dispensing. The droplets were reproducibly dispensed under the two four-second cycles with an RSD % of less than 2 % in their volume. The pipetting precision of the system is within the maximum permissible error defined by the ISO 8655 standard. Furthermore, the droplet volume can be easily and precisely adjusted by varying the duration of the applied voltage through software, because the fabricated CNT actuator-based pipetting system operates in a very low-pressure regime. This study is an example of one of the practical uses of CNT-based actuators.
References
Addinall R, Sugino T, Neuhaus R et al (2014) Integration of CNT—based actuators for bio—medical applications—example printed circuit board CNT actuator pipette, 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp 1436–1441
Asaka K, Mukai K, Sugino T et al (2009) Highly conductive Sheets from Millimeter-Long Single-Walled carbon nanotubes and ionic liquids: application to fast-moving, low-voltage electromechanical actuators cperable in airs. Adv Mater 21:1582–1585. doi:10.1002/adma.200802817
Asaka K, Mukai K, Sugino T, Kiyohara K (2013) Ionic electroactive polymer actuators based on nano-carbon electrodes. Polym Int 62:1263–1270. doi:10.1002/pi.4562
Benard WL, Kahn H, Heuer AH, Huff MA (1998) Thin-film shape-memory alloy actuated micropumps. J Microelectromech Syst 7:245–251. doi:10.1109/84.679390
Kruusamäe K, Mukai K, Sugino T, Asaka K (2014) Mechanical behaviour of bending bucky-gel actuators and its representation. Smart Mater Struct 23:025031. doi:10.1088/0964-1726/23/2/025031
Nguyen NT, Truong TQ (2004) A fully polymeric micropump with piezoelectric actuator. Sens Actuat B Chem 97:137–143. doi:10.1016/S0925-4005(03)00521-5
Sugino T, Kiyohara K, Takeuchi I et al (2009) Actuator properties of the complexes composed by carbon nanotube and ionic liquid: the effects of additives. Sens Actuat B Chem 141:179–186. doi:10.1016/j.snb.2009.06.002
Sugino T, Shibata Y, Kiyohara K, Asaka K (2012) CNT/conductive polymer composites for low-voltage driven EAP actuators. Proc SPIE 8340, Electroact Polym Actuat Devices (EAPAD) 83400T. doi:10.1117/12.914759
Torop J, Arulepp M, Sugino T et al (2014) Microporous and mesoporous carbide-derived carbons for strain modification of electromechanical actuators. Langmuir 30:2583–2587. doi:10.1021/la404616w
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Goya, K., Fuchiwaki, Y., Tanaka, M. et al. A micropipette system based on low driving voltage carbon nanotube actuator. Microsyst Technol 23, 2657–2661 (2017). https://doi.org/10.1007/s00542-016-2943-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-016-2943-y