
Abstract
This paper deals with a development process of a vibration energy harvesting device in aircraft applications. The vibration energy harvester uses ambient energy of mechanical vibration and it provides an autonomous source of energy for wireless sensors or autonomous applications. This application presents a complex engineering problem and the vibration energy harvester consists of precise mechanical part, electro-mechanical converter, electronics and a powered application. It can be perceive as a mechatronic system and a mechatronic approach was used for development of our vibration energy harvester. An essential step of development process is simulation modeling which is based on mechatronic approach. Presented model-based design of vibration energy harvester is very useful during development process and the whole development process of the autonomous energy source is presented in this paper. The main aim of the paper is an introduction of our development methodology and our approach is presented on a sample of the vibration energy harvester for aircraft applications under project ESPOSA.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
A branch of energy harvesting is focused on a generating of useful electricity from ambient energy in engineering applications (Hadas and Singule 2011). Ambient energy is everywhere in the surrounding environment and it can be used for energy harvesting. This energy is available in the form of radiation (solar or RF radiation), thermal energy and mechanical energy of the environment or energy of chemical or biological sources. The first energy harvesting devices were developed on the beginning of new millennium (Paradiso and Starner 2005) and successfully tested in a lab condition. Only several energy harvesting application were successfully used in commercial applications. The energy harvesting source of energy is not suitable for all autonomous applications or wireless sensors. There are significant limitations in power consumption of a powered device.
Therefore there are several suitable applications in engineering where the energy harvesting can be an adequate source of energy (Benasciutti et al. 2010). Well-known is a using of energy harvesting sources in smart buildings and huge structures, like petrochemical industry etc. Our University has been working in the branch of energy harvesting from mechanical vibrations for 10 years under several projects with aircraft industry (Hadas and Singule 2010).
The common vibration energy harvesting application consists of precise mechanical part, electro-mechanical converter, power electronics and a powered autonomous application. This complex system can be perceived as the mechatronic system and the mechatronic approach can be used for a development of new vibration energy harvesting applications.
The mechatronic approach uses several development cycles in micro and macro levels and a maturity of a developed product is increased during passing of several development cycles (Hadas et al. 2010a, b, c). This approach employs modern computing techniques and simulation modeling of the developed device in all development cycles (Chen et al. 2013; Dow et al. 2012; Julin Blystad and Halvorsen 2011). A model-based design is modern methodology for the development of modern mechatronic devices. The model-based design accelerates development process because several development cycles could be realized as computational models (Grepl and Lee 2009). A testing sample of the developed device could be manufactured promptly and required properties will be verified. This mechatronic approach based on model was applied for the development of vibration energy harvester under project ESPOSA and the used development process based on model is presented in this paper.
2 Motivations
Nowadays energy harvesting technologies are used in varied engineering applications (automotive, aeronautics, smart building, transport and heavy industry, etc.) and the efficiency of energy harvesting systems is still improved. Although levels of ambient energy are very low this technology can be used as power supply for modern low power electronics. A wide range of autonomous applications are targeted on a using of energy harvesters, including wireless sensor nodes, embedded and implanted sensors for medical applications, monitoring of areas and technical systems, etc. The energy harvesting in aircraft industry is important topic in recent research and development.
The aircraft industry uses usually the energy harvesting device as the source of autonomous energy for some wireless sensors (Hadas et al. 2013). There is an opportunity for the autonomous energy source in health and usage monitoring systems, shortly HUMS, and wireless sensors units, shortly WSU.
The developed and presented energy harvester is used to powering of the WSU under project ESPOSA. The WSU is mounted at a spot of specific vibration diagnostic, such as hanger, bearing, gearbox, engine, etc. This sensor could be powered from mechanical vibrations all time. It provides power requirements on the development of the vibration energy harvester.
This harvester will use the vibration frequency, which is one of a dominant operation frequency of a diagnosed or monitored mechanical structure. The vibration energy harvester is designed with respect to the WSU requirements. These requirements are provided by partner of project ESPOSA (Honeywell International) and they were used for the design of the vibration energy harvester.
The requirements of WSU:
-
Operation frequency: 28.75 Hz,
-
Acceleration peaks: 0.3–1 G,
-
Typical power consumption: 50–70 mW,
-
Maximal power consumption: 100 mW,
-
Input AC voltage range: up to 19 V (operation with commercial power management),
-
Maximal weight of harvester: 300 g.
3 Used principle of vibration energy harvesting systems
The principle behind the vibration energy harvesting is a resonance operation of an oscillating mass and consequent an electro-mechanical conversion of kinetic energy into electrical energy Hadas et al. (2010). The fundamental part of the vibration energy harvester is a resonance mechanism. An oscillation inside the resonance mechanism can be converted by any physical principle of the electro-mechanical conversion. The vibration energy harvesters use usually principles of a piezo-electric, magnetostriction, electro-static or electro-magnetic mechanical conversion (Paradiso and Starner 2005). The choice of suitable physical principle of energy conversion is very important for an efficient harvesting of energy. Each principle of energy converter is suitable for different application and required output power. The using of energy harvesting principles was several times published, e.g. by authors Hadas et al. (2010). On the base of our requirements the electro-magnetic principle is used due to a relatively low vibration frequency and high power consumption of the WSU. These criterions handicap other mentioned principles of energy conversion.
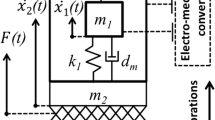
Energy of oscillation movement inside our resonance mechanism is harvested by electro-magnetic converter (Beeby et al. 2006). The operation of the resonance mechanism with a moving magnet, which is oscillated against a fixed coil, is used in our design. An equivalent circuit diagram and a symbolic representation of this device is schematically shown on a diagram in Fig. 1 and it operates correctly and efficiently only in a narrow resonance bandwidth. Therefore, the design of the vibration energy harvester is tuned up to the operation frequency Hadas et al. (2009).

Diagram of electro-magnetic vibration energy harvester
This mechanism is based on spring-less suspension of a moving mass m. The stiffness k is provided by repelled magnetic forces, it is shown in Fig. 2. This resonance mechanism is excited by ambient mechanical vibrations and it provides relative movement x of a magnetic circuit against a fixed coil (L, R c ). This movement induced voltage u i due to Faraday’s law.

Topological model of resonance mechanism with electro-magnetic converter
The harvested electrical power is dissipated from the mechanical system and it provides electro-magnetic damping effect, which is depicted as damper b e . Maximal electrical power is harvested when dissipated mechanical forces inside the harvester, depicted as damper b m , and electro-magnetic forces caused by damper b e are in equilibrium. Nevertheless the vibration energy harvester has to operate in resonance (Fiala and Drexler 2012).
The resonance mechanism of the vibration energy harvester is a key element of the energy harvesting application Hadas et al. (2009). Our developed design of the harvester is based on a unique spring-less resonance mechanism, which provides suitable quality factor for the energy harvesting application. The presented and used unique design of our harvester is used for several years and a topological model, which was published in previous paper Hadas et al. (2010), is shown in Fig. 2, where the moving mass is designed as a pendulum with the magnetic circuit on a pendulum end.
The relative movement of the magnetic circuit against the fixed self-bonded air coil is provided by a precise bearing surface in a joint. The stiffness of a springy element is provided by repelled forces between fixed permanent magnets and a movable permanent magnet on the pendulum. The stiffness characteristic of the resonance mechanism is tuned up to frequency of vibrations. This mechanism does not contain any mechanical spring and overall mechanical damping forces are caused by friction forces in the joint of the pendulum. A joint design, materials and geometry have to be adapted in the relation with the required quality factor and the nominal level of the ambient vibration. Due to low mechanical damping this vibration energy harvester can generate more energy than a harvester with mechanical spring inside a resonance mechanism Hadas et al. (2010). An indisputable advantage of this conception design is a maintenance free operation.
4 Model-based design of vibration energy harvester
Model-based design is a method of systems development associated with design of complex mechatronic systems. This method is used in many applications like motion control, industrial equipment, aerospace and automotive applications. This model-based design method was applied for development of the vibration energy harvester and a testing with commercial power management electronics was realized. The developed device is prepared for flight test as autonomous source of the WSU for aircraft application.
4.1 Used mechatronic approach for design of energy harvester
The main aim under our development process is an optimal design of a new energy harvesting device with required output parameters for powering of the WSU. The choice of the suitable energy harvesting method and harvester design is very important for efficient harvesting of energy Hadas et al. (2009). The maximal volume or weight of the energy harvester is usually another limiting factor of using this alternative source in aircraft applications. Therefore, the design of the vibration energy harvester has to be optimized to maximal efficiency and required power. An oversized harvester is inadmissible in aircraft applications, for that reason our mechatronic team used a modern model-based design method, which is well-known in mechatronics, to improve a development process of energy harvester systems (Hadas et al. 2012).
Here considered methodology describes the whole development process of our mechatronic system based on model. The design of this new vibration energy harvester can be described as a development process with frameworks of mechatronic approach. The used development process of the presented harvester is shown in Fig. 3.

Development process of vibration energy harvester
The first development cycle of developed harvester started with basic linear analyses of energy harvesting methods and the electro-magnetic principle of electro-mechanical conversion was used. On the base of these analyses the principle and design of our resonance mechanism was used for this task. The first step of the development process included initial dynamic analyses of the vibration energy harvester, which is based on the simple linear model which is shown in Fig. 1. The simple requirements of harvested power is applied and validated. On the base of this validation this model shows that our concept of the vibration energy harvester is applicable for efficient energy harvesting.
There are several additional development steps and cycles which improve the models and products of the vibration energy harvester development process on the base of output requirements. These development steps are described in this paper and thereafter a developed sample of the vibration energy harvester was tested; excited by vibration of a lab shaker and excited by mechanical vibration of a flexible structure with a commercial power management.
The development process based on the presented mechatronic approach can continue to improve the harvester design. On the base of flight tests harvester parameters can be redesigned for efficient energy harvesting in aircraft applications. This upcoming process can used our verified model-based design and the validated harvester parameters will be redesigned very quickly for efficient energy harvesting and powering of the used WSU. Nevertheless there is space for the optimal design of the whole wireless application (harvester + sensor). This complex mechatronic system can be developed together and certainly the more efficient application will be developed.
4.2 Simulink model
The Simulink is basic and useful mechatronic environment which can be used for a support of the model-based design of our vibration energy harvester (Hadas et al. 2007). The resonance mechanism is modeled as the second order differential equation which is excited by acceleration of ambient mechanical vibrations. This model was several times presented Hadas et al. (2010) and it corresponds with Fig. 1. The resonance frequency is tuned up by magnetic stiffness and this model has to be analyzed by a finite element model of repelled magnets. The resonance behavior is affected by quality factor of the harvester mechanism. The electrical model is based on Faraday’s and Kirchhoff’s circuit laws and these models are integrated in Simulink model, Fig. 4. The harvesting of electrical power provides feedbacks to the mechanical model as electro-mechanical dissipation of energy and it is presented in the paper by Hadas et al. (2010).

Simulink model of vibration energy harvester
This model respects the fact that maximal electrical power is harvested when dissipated mechanical forces inside the harvester and electro-magnetic forces are in equilibrium. Harvested power depends on a level and frequency of mechanical vibrations Hadas et al. (2010). However, harvested output power significantly depends on an electrical load which represents the power management circuit with the energy storage element and an electrical load.
This described model, which is shown in Fig. 4, can be analyzed as the simple linear model for initial harvesting analyses. There are several independent parameters of the vibration energy harvester design and this model can be used for optimization studies with the aim of maximal harvested power with minimal volume and harvester weight Hadas et al. (2009).
The individual Simulink sub-models and its parameters are validated and verified during development process and improved during individual goes through development cycles of the V-model. Finally this presented model can credible simulate behavior of the harvester during exciting of a real vibration model, which can be measured on the real vibrating mechanical structure Hadas et al. (2010).
Therefore, the model-based design of the energy harvesters is very useful in development process of these devices. Harvested power can be calculated in time domain before manufacturing of the harvester. Harvested energy can be validated and the using of the appropriate WSU with or without a backup battery can be decided. On the other hand the result of this analysis can make a decision whether a using of the energy harvesting application is not realistic or reasonable.
4.3 Optimization study of harvester model
The aim of an optimization study in our energy harvesting application is proposal of harvester parameters which guarantee prescribed requirements (output power, voltage, etc.) during excitation by the model of ambient mechanical vibrations. This study can be realized with the harvester model, Fig. 3 and an appropriate optimization method has to be used.
The harvester model for the optimization study has several dozen parameters, which represents geometry of the harvester design, weight and volume, parameters of permanent magnets, coil parameters, electronics and other vibration energy harvester parameters. The using of traditional optimization methods with several parameters is very difficult. However, the optimization tool based on artificial intelligence can be useful for this complex study.
An optimization tool “self-organizing migrating algorithm”, shortly SOMA, was employed during our development process (Hadas et al. 2011). This optimization tool SOMA can be used for global optimization of the most of the harvester parameters. The optimized parameters have to be limited in adequate range, which is in accordance with reality. The parameters of vibration conditions and required parameters put on this energy harvesting device are inputs to the SOMA. The requirements can include maximal volume, weight, minimal output voltage, etc. These requirements are solved as a fitness function during simulations of the harvester model. The value of the fitness function is calculated from the model, Fig. 3. The model with non-linear stiffness, which correspond with repelled magnets models, was used. This model provides realistic response of the resonance mechanism and any notional harvested power is not solved during the optimize analysis.
The tool SOMA and its using in energy harvesting applications were published in the paper by Hadas et al. (2012). The using of this tool for the optimization study of the energy harvester was performed. Technical requirements and the harvester model were used for the solving of optimal parameters and the calculated parameters are used for a validation under our mechatronic development cycle, Fig. 3.
4.4 CAD redesign of optimized parameters
A vector of optimized harvester parameters can be used for an automatic generation of a CAD model of the optimized vibration energy harvester in CAD environment. This approach of the automatically generated CAD model can provide the ideal harvester model. However, this CAD model has to be validated and redesigned with respect to engineering approach and permanent magnets have to be designed in accordance with an offer of the market.
The modified CAD model of the vibration energy harvester, which has assumption of the most nearby optimal behavior, was created and it is used for these additional analyses in model-based design process. This CAD model of harvester operating parts with descriptions of functional parts is shown in Fig. 5.

CAD model for FEM analyses of vibration energy harvester
The CAD model can be used for finite element methods, shortly FEM, analysis and it provides useful tools in development process of the vibration energy harvester and consecutively the efficient energy harvesting device can be developed (Serre et al. 2008; Ralib et al. 2012; Salim et al. 2012). Ansys Maxwell environment was chosen for magnetic analyses and the results are presented for our developed vibration energy harvester. There are analyses of magnetic stiffness of the spring-less resonance mechanism, analysis of magnetic field through the coil and an induced voltage simulation is presented.
4.5 FEM model of magnetic stiffness in Ansys Maxwell
The optimization study does not calculate parameters of permanent magnets which provide magnetic stiffness. The CAD model provides the moving mass model and the design and parameters of spring-less stiffness has to be determined on the base of operating resonance frequency. The ratio between magnetic stiffness and the moving mass of the final CAD model has to correspond with operation frequency 28.75 Hz. The stiffness ratio corresponds with magnetic forces of stiffness permanent magnets. Required stiffness 11.0 N/rad are calculated in accordance with operation frequency 28.75 Hz and the mass model. Magnetic stiffness is designed using magnetic analysis in FEM environment.
Magnetic repelled forces depend on dimension, geometry and materials of used rare earth magnets. Dimensions and material of stiffness magnets are chosen and the geometry is analyzed on the base of the magnetic study of the FEM model of moving parts. It provides a simple optimization study and during several steps of FEM analyses and final dimensions, material and geometry is solved. The final position and dimension of stiffness magnets is shown in Fig. 5 and the stiffness characteristic is shown in Fig. 6. It provides linear stiffness of the moving pendulum in range ±0.04 radians and it is in accordance with the required value. The moving close to construction limits provides non-linear stiffness and its influence was presented in the paper by Hadas et al. (2010). Due to nonlinear stiffness of the spring-less mechanism the operating bandwidth can be significantly extended.

FEM characteristic of stiffness model of vibration energy harvester
4.6 FEM model of magnetic flux in Ansys Maxwell
Magnetic flux in the FEM model was analyzed. An accuracy of the FEM model depends on an appropriate mesh of the air and harvester parts. Results of this magnetic flux density analyses in the coil area are used as a precise input of the mechatronic model in Simulink, which simulates induced voltage due to Faraday’s Law. The detail of magnetic flux density through the coil area is shown in Fig. 7. A spread of magnetic flux density through coil during moving of the pendulum with the magnetic circuit affects amplitude and shape of induced voltage. This graph of magnetic flux density vs. moved angle is shown in Fig. 8. The harvester construction limit of the moving pendulum is ±5° and the moving of the magnetic circuit is shown in range of typical operation ±4°.

Detail of magnetic flux density in x direction at place of coil area cross-section

Average magnetic flux in coil area vs. position of magnetic circuit
4.7 Final mechatronic model
The simulation modeling of the designed electro-magnetic vibration energy harvester provides very important steps in the process of the model-based design of the used harvester. FEM models of this mechatronic device in Ansys Maxwell environment provides the useful tool for improving of energy harvesting models and the more efficient harvester can be developed.
There is several development cycles of the model-based design described above, which leads to the final CAD model of the developed vibration energy harvester. The developed harvester has the self-bonded air coil with 650 turns and inner resistance of the coil model is 80 Ω. The coil is wounded by a copper wire with diameter 0.28 mm. The maximal induced voltage of this model is 16 V and expected maximal output power is around 90 mW. The sensitivity of this harvester to excited vibrations has to be tested and verified on the base of a quality factor testing.
The last step in the model-based design process is the design of a harvester frame for assembling of operating parts and it is designed with respects to the harvester operation, assembling and fixing of the harvester. The final CAD model and dimension of the frame are shown in Fig. 9. The fixed parts of the harvester and the plastic frame will be glued. The developed vibration energy harvester has weight 285 g.

Final CAD model and dimensions of vibration energy harvester
4.8 Rapid prototyping and assembly of harvester
The design of this harvester is based on a rapid prototyping technology for manufacturing of the plastic frame (Hadas et al. 2008). This technology is very useful for developing of new mechatronic systems and it is absolutely in accordance with idea of mechatronic approach due to very fast manufacturing on the base of the CAD model. Plastic parts of the frame are assembled with aluminum parts and permanent magnets to the correct position and glued together. The moving mass is placed as the pendulum between stiffness magnets and the pendulum is placed in a revolving joint. The pendulum joint is provided by friction bearings in aluminum part of the frame. The magnetic circuit is assembled on the end of pendulum. The copper coil with wounded 600 turns and inner resistance 76 Ω is placed inside the magnetic circuit with permanent magnets and glued to the plastic frame. The assembled device without cover is shown in Fig. 10.

Test sample of vibration energy harvester
5 Verification of harvester model
5.1 Verification of resonance mechanism
Resonance frequency is fundamental for correct operation of the vibration energy harvester. Resonance frequency is determined by stiffness and mass ratio. The model of magnetic stiffness was solved by the Ansys Maxwell model, Fig. 6, and real magnetic stiffness had difference in the assembled device and frequency of harvester response was 26.3 Hz. It can be caused by a non-accurate model of magnetic materials and the magnetic stiffness model was verified for future correct solution.
The magnets were tuned up to the correct position for required operation frequency. The operating frequency was observed on the base of the measured voltage response. The measured voltage response of the final tuned up harvester is shown in Fig. 11 and frequency of the measured response is 28.8 Hz.

Measured response of vibration energy harvester—frequency 28.8 Hz
5.2 Verification of quality factor
Harvested power depends on a level and frequency of excited vibration and moving mass. Harvested power is affected by dissipation of mechanical energy during excited oscillation. Dissipating of mechanical energy inside the resonance mechanism is usually presents as mechanical quality factor. A model of quality factor has to be verified on the base of real measurements of the assembled harvester. During development process quality factor of the resonance mechanism was estimated from the resonance mechanism with similar size and operating frequency Hadas et al. (2010). The presented design of the resonance mechanism can operate with the quality factor in range 50–300. Quality factor of our resonance mechanism is affected by used materials and it has to be verified for the next development cycle and the validation of the present model.
Quality factor can be estimated from mechanical response of the vibration energy harvester. It means that the harvester is excited by a mechanical shock or an initial displacement of the moving pendulum and the voltage response is observed. Quality factor of our resonance mechanism is non-linear due to friction forces and its value is varied. For our model-based design is used only the linear model which respects average oscillation of the moving mass and it very well describes the model of the energy harvesting device Hadas, Singule and Ondrusek (2010).
The value of quality factor depends on several parameters; used materials of friction bearings, magnitude of axial and radial magnetic forces which affects friction in the joint etc. This problematic is very complex nevertheless verified quality factor from the harvester response is suitable for energy harvesting model. There are two responses shown in Fig. 12, the first response has time around 4 s and the second response has time around 8 s. The first response was measured immediately after assembling of the harvester mechanism and the second, longer, was measured after several hours of the testing of the vibration energy harvester under resonance exciting in our lab. The influence of friction forces after assembling is evident and it affects the resonance amplitude and consecutively harvested power. After more than 2 h of operation in resonance operation a change of a time response was not observed. The quality factor, which corresponds with 8 s response, is in range 150–200. This value is depended on oscillation amplitude and the average linear quality factor with value 175 was used for modeling of the harvester mechanism in the Simulink model.

Response of vibration energy harvester for initial displacement
6 Tests and measurement of vibration energy harvester
Maximal electrical power is harvested when dissipated mechanical power inside the harvester mechanism and overall electrical power are in equilibrium. The main problem is nonlinear behavior of electronics (rectifier, power management electronic, etc.) as well non-linear quality factor.
Therefore, the vibration energy harvester with a pure resistance load and a rectifier with a resistance load were tested and results are compared. The equivalent circuit diagrams of measurements are shown in Fig. 13. The vibration energy harvester was excited by sinusoidal mechanical vibrations with resonance frequency 28.8 Hz. The varied amplitude of excited vibrations was used during this shaker test.

Equivalent circuit diagram of used tests: a pure resistance load, b rectifier with resistance load
A voltage–ampere characteristic for the measurement with the pure resistance load and the characteristic of harvesting affected by rectifier are shown in Fig. 14. There are shown two levels of excited vibrations, with the amplitude of acceleration 0.2 and 0.3 G. The influence of harvested power by the rectifier is evident. It is caused by non-linear behavior of the rectifier it has positive effect to harvesting of energy.

Voltage–ampere characteristic of tested harvester
The same measurements are shown in Fig. 15 and this graph represents an influence of the resistance load to output power. The influence of harvested power by the rectifier is evident too. The rectifier allows higher oscillating movement inside the harvester mechanism due to non-linear current flow during oscillation and the important knowledge is showed that the rectifier shifts optimal resistance load against the measurement with the pure resistance load. The very important note in this case is that the inner resistance of the used air coil is 76 Ω. The shown optimal power point corresponds with knowledge that maximal power is harvested when both electrical and mechanical damping are equal.

Optimal output power point
The optimal power point is shifted with the acceleration amplitude of excited vibration. It is shown in Fig. 15 but for lower vibration amplitude (0.2 and 0.3 G) it is not significant. A dependence of output power vs. vibration amplitude is shown in Fig. 16. There is only the pure resistance load was connected. This graph is shown for the optimal power point in each vibration level of acceleration. Excited mechanical vibrations over amplitude 0.4 G shift optimal power point around the resistance load 500 Ω due to operation close to the construction limit.

Output power vs. vibrations amplitude; optimal resistance load
Other dependence of output power vs. vibration amplitude, which is shown in the voltage–ampere characteristic in Fig. 17, provides information about output power for the constant resistance load 1,400 Ω. In comparison with the previous Fig. 16 is evident that for efficient energy harvesting the power management electronics has to shift with the optimal power point on the base of level of excited vibrations.

Output power and voltage–ampere characteristic vs. vibrations amplitude for resistance load 1,400 Ω
7 Test of harvester with power management
Our developed vibration energy harvester was tested with commercial power management circuit. The power management electronics MAX17710 was used and it provides a complete system for charging and protecting micropower-storage cells such as THINERGY cell. This electronics can be used to manage poorly regulated sources such as our harvester with output levels ranging from 1 μW to 100 mW. An internal regulator protects the cell from overcharging. The schematically depicted testing assembly is shown in Fig. 18 and picture of this assembly is shown in Fig. 19.

Energy harvesting application of WSU with commercial power management

Picture of vibration energy harvester with power management
This vibration energy harvester was tested with real vibrations on a flexible lab beam and vibrations were excited by a DC motor with a non-balancing rotor. Frequency of mechanical vibrations was controlled by CD motor voltage and an operation of the whole energy harvesting application was observed. This test was used without any connected wireless sensor and only the influence of the battery charging was tested. It was compared with voltage–ampere characteristic measured with the resistance load. The comparison of both measurements is shown in Fig. 20.

Energy harvesting test with resistance load and with power management MAX17710
The operation of the developed vibration energy harvester with the commercial power management circuit causes higher output power than operation of this device with the optimal resistance load due to non-linear behavior or the used power management electronics. It corresponds with lab results shown in Fig. 15.
The test was repeated and performed with the discharged battery and the charging time was measured. This energy harvesting application can charge up used discharged battery, Fig. 19, approximately during half hour. The excited mechanical vibrations of the flexible lab beam were on 30 % of full performance of the harvester operation during this test.
8 Conclusions
The aim of this paper was summarized the mechatronic approach which was used for the development of the presented vibration energy harvester. The development process of this mechatronic task is based on the model-based design. This modern methodology is very useful for developing of new vibration energy harvesters and it can be used in other energy harvesting application, e.g. thermo-electrical generators (Ancik et al. 2013). It is useful for a development of practically all devices with multidisciplinary orientation.
The next step in our project will be using of this methodology for development of the whole system of energy harvester with the wireless sensor. It promises reducing of WSU power consumption with respect to operation with energy harvester. Therefore, the WSU developed under project ESPOSA can operate effectively as an autonomous unit with the vibration energy harvester.
This methodology can save time and total costs during development process of such vibration energy harvester and WSU. On the base of customer’s requirements our model-based design of the vibration energy harvester can be used, optimized and redesigned not only for future aircraft applications. The test of power management shows potential of this application not only for wireless sensors.
References
Ancik Z, Vlach R, Janak L, Kopecek P, Hadas Z (2013) Modeling, simulation and experimental testing of the MEMS thermoelectric generators in wide range of operational conditions. In: Proceedings of SPIE Smart Sensors, Actuators, and MEMS VI 8763: 87631M 1–10. doi:10.1117/12.2017134
Beeby SP, Tudor MJ, White NM (2006) Energy harvesting vibration sources for microsystems applications. Meas Sci Technol 17(12):175–195
Benasciutti D, Moro L, Zelenika S, Brusa E (2010) Vibration energy scavenging via piezoelectric bimorphs of optimized shapes. Microsyst Technol 16(5):657–668. doi:10.1007/s00542-009-1000-5
Chen YJ, Pan CT, Liu ZH (2013) Analysis of an in-plane micro-generator with various microcoil shapes. Microsyst Technol 19(1):43–52. doi:10.1007/s00542-012-1635-5
Dow ABA, Schneider M, Koo D, Al-Rubaye HA, Bittner A, Schmid U, Kherani N (2012) Modeling the performance of a micromachined piezoelectric energy harvester. Microsyst Technol 18(7–8):1035–1043. doi:10.1007/s00542-012-1436-x
Fiala P, Drexler P (2012) Power supply sources based on resonant energy harvesting. Microsyst Technol 18(7–8):1181–1192. doi:10.1007/s00542-012-1474-4
Grepl R, Lee B (2009) Model based controller design for automotive electronic throttle. Recent advances in mechatronics 2008–2009, Springer, Berlin, pp 209–214. doi:10.1007/978-3-642-05022-0_36
Hadas Z, Kurfurst J, Ondrusek C, Singule V (2012a) Artificial intelligence based optimization for vibration energy harvesting applications. Microsyst Technol 18(7–8):1003–1014. doi:10.1007/s00542-012-1432-1
Hadas Z, Ondrusek C, Kurfurst J (2009) Optimization of vibration power generator parameters using self-organizing migrating algorithm. Recent advances in mechatronics 2008–2009, Springer, Berlin, pp 245–250. doi:10.1007/978-3-642-05022-0_42
Hadas Z, Ondrusek C, Kurfurst J, Singule V (2011) Vibration energy harvester optimization using artificial intelligence. In: Proceedings of SPIE—The International Society for Optical Engineering 8066:8066111. doi:10.1117/12.886383
Hadas Z, Ondrusek C, Singule V (2009) Increasing sensitivity of vibration energy harvester. In: Proceedings of SPIE Europe Microtechnologies for the New Millennium 7362(1):516–522. doi:10.1117/12.820919
Hadas Z, Ondrusek C, Singule V (2010a) Power sensitivity of vibration energy harvester. Microsyst Technol 16(5):691–702. doi:10.1007/s00542-010-1046-4
Hadas Z, Singule V (2010) New subject “Energy Harvesting” for education of mechatronics. In: Proceedings of 13th International Symposium on Mechatronics MECHATRONIKA 2010, 5521192:16–17
Hadas Z, Singule V (2011) Energy harvesting—opportunity for future remote applications. In: Proceedings of 17th International Conference on Engineering Mechanics, Svratka, Czech Republic, 167–170
Hadas Z, Singule V, Ondrusek C (2009c) Optimal design of vibration power generator for low frequency. Solid State Phenom 147–149:426–431. doi:10.4028/www.scientific.net/SSP.147-149.426
Hadas Z, Singule V, Ondrusek C (2010b) Verification of vibration power generator model for prediction of harvested power. Solid State Phenom 164:291–296. doi:10.4028/www.scientific.net/SSP.164.291
Hadas Z, Singule V, Ondrusek C, Kluge M (2007) Simulation of vibration power generator. Recent Adv Mechatron. doi:10.1007/978-3-540-73956-2_69
Hadas Z, Singule V, Vechet S, Ondrusek C (2010c) Development of energy harvesting sources for remote applications as mechatronic systems. In: 14th International Power Electronics and Motion Control Conference (EPE/PEMC 2010), 13–19. doi:10.1109/EPEPEMC.2010.5606867
Hadas Z, Vetiska V, Ancik Z, Ondrusek C, Singule V (2013) Development of energy harvester system for avionics. In: Proceedings of SPIE Smart Sensors, Actuators, and MEMS VI 8763:87631F 1–8. doi:10.1117/12.2017126
Hadas Z, Vetiska V, Singule V, Andrs O, Kovar J, Vetiska J (2012b) Energy harvesting from mechanical shocks using a sensitive vibration energy harvester. Int J Adv Rob Syst 9(225):1–7. doi:10.5772/53948
Hadas Z, Zouhar J, Singule V, Ondrusek C (2008) Design of energy harvesting generator base on rapid prototyping parts. In: IEEE 13th Power Electronics and Motion Control Conference Poznan, 1665–1669. doi:10.1109/EPEPEMC.2008.4635506
Julin Blystad L-C, Halvorsen E (2011) A piezoelectric energy harvester with a mechanical end stop on one side. Microsyst Technol 17(4):505–511. doi:10.1007/s00542-010-1163-0
Md Ralib AA, Nordin AN, Salleh H, Othman R (2012) Fabrication of aluminium doped zinc oxide piezoelectric thin film on a silicon substrate for piezoelectric MEMS energy harvesters. Microsyst Technol 18(11):1761–1769. doi:10.1007/s00542-012-1550-9
Paradiso JA, Starner T (2005) Energy scavenging for mobile and wireless electronic. IEEE Pervasive Comput 4(1):18–27
Salim MD, Salleh H, Salim DSM (2012) Simulation and experimental investigation of a wide band PZ MEMS harvester at low frequencies. Microsyst Technol 18(6):753–763. doi:10.1007/s00542-012-1453-9
Serre C et al (2008) Design and implementation of mechanical resonators for optimized inertial electromagnetic microgenerators. Microsyst Technol 14(4–5):653–658. doi:10.1007/s00542-007-0494-y
Acknowledgments
This work has been funded by the European Commission within the FP7 project “Efficient Systems and Propulsion for Small Aircraft | ESPOSA”, Grant Agreement No. ACP1-GA-2011-284859-ESPOSA. And additional support by European Regional Development Fund in the framework of the research project NETME Centre under the Operational Programme Research and Development for Innovation. Reg. Nr. CZ.1.05/2.1.00/01.0002, id code: ED0002/01/01, project name: NETME Centre—New Technologies for Mechanical Engineering.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Hadas, Z., Vetiska, V., Huzlik, R. et al. Model-based design and test of vibration energy harvester for aircraft application. Microsyst Technol 20, 831–843 (2014). https://doi.org/10.1007/s00542-013-2062-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-013-2062-y