
Abstract
Optimal power flow (OPF) is one of the most fundamental single/multi-objective, nonlinear, and non-convex optimization problems in modern power systems. Renewable energy sources are integrated into power systems to provide environmental sustainability and to reduce emissions and fuel costs. Therefore, some conventional thermal generators are being replaced with wind power sources. Although wind power is a widely used renewable energy source, it is intermittent in nature and wind speed is uncertain at any given time. For this reason, the Weibull probability density function is one of the important methods used in calculating available wind power. This paper presents an improved method based on the Lévy Coyote optimization algorithm (LCOA) for solving the OPF problem with stochastic wind power. In the proposed LCOA, Lévy Flights were added to the Coyote optimization algorithm to avoid local optima and to improve the ability to focus on optimal solutions. To show the effect of the novel contribution to the algorithm, the LCOA method was tested using the Congress on Evolutionary Computation-2005 benchmark test functions. Subsequently, the solution to the OPF problem with stochastic wind power was tested via the LCOA and other heuristic optimization algorithms in IEEE 30-bus, 57-bus, and 118-bus test systems. Eighteen different cases were executed including fuel cost, emissions, active power loss, voltage profile, and voltage stability, in single- and multi-objective optimization. The results showed that the LCOA was more effective than the other optimization methods at reaching an optimal solution to the OPF problem with stochastic wind power.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent years, due to technological and industrial developments, the worldwide demand for electrical power and load diversity has been increasing. It is extremely important that the power obtained from power systems is of high quality and is delivered to the user with high efficiency, but also at minimum cost and with reduced emissions and power losses. In the planning of modern electrical power systems, optimal power flow (OPF) is one of the fundamental optimization problems that has existed for many years and continues to be an important issue to the present day. The OPF is an important non-convex and nonlinear problem that aims to adjust the control variables to optimum values in order to minimize fuel cost and power losses by considering various equality and inequality constraints in a power system [1]. The main purpose of the this problem is to optimize a single- or multi-objective function such as fuel cost, piecewise quadratic cost function, fuel cost with valve-point effect, voltage profile improvement, emission reduction, and voltage stability enhancement while considering equality and inequality constraints [1, 2]. In the OPF problem, the tap ratio of the transformers, bus voltages, and active or reactive powers of the generators express the control variables, whereas state variables consist of generator reactive power outputs, the load bus voltage, and transmission line flows [3, 4]. In the solution of the OPF problem, the three-phase power system was assumed to be in a steady state. The voltage values and angles of the buses were calculated under this assumption. The obtained results were then used to calculate the active and reactive power flows and losses in the transmission lines and transformers [5].
Initially, various mathematical approaches such as the internal point [6], linear programming [7], Newton Raphson [8], and Lagrangian [9] methods were used to solve the OPF problem, but the solutions obtained by these methods were far from producing optimum values, especially for complex systems and difficult high-dimensional problems. These methods have some disadvantages such as converging to local optima and in terms of calculation time. Furthermore, due to their nonlinear characteristics, these methods cannot provide effective results for valve-point effect problems. For this reason, classical mathematical methods used to solve power system problems have been replaced today by heuristic methods. The heuristic methods used in solving problems can provide effective solutions faster and that are closer to optimum values than classical methods. Heuristic methods are often inspired by certain laws of nature and biological features or collective behaviors exhibited by living creatures.
Recently, various heuristic methods such as the genetic algorithm (GA) [10], gravitational search algorithm (GSA) [11], krill herd algorithm (KHA) [12], Particle Swarm Optimization (PSO) [13], Moth Swarm Algorithm (MSA) [14], Differential Evolution (DE) [15], grey wolf optimization with Pattern Search (GWO-PS) [16], firefly algorithm (FA) [17], and salp swarm optimizer (SSO) [18] have been used in the solution of the OPF problem. In 2002, Abido used the PSO to minimize test functions such as total cost, voltage stability, and voltage profile development in an IEEE 30-bus test system [13]. In 2003, the fuel cost was minimized by Roa Sepulveda in IEEE 6- and 30-bus systems using the Simulated Annealing (SA) algorithm [19]. In 2004, the fuel cost was minimized by Bouktir et al. in an IEEE 30-bus test system using the GA [20]. The PSO was applied by Dutta and Sinha for the solution of a multi-objective OPF problem in IEEE 30-, 57-, and 118-bus systems by considering voltage stability constraints [21]. In 2012, fuel cost, voltage profile and voltage stability development, voltage stability increase in case of constraints, piecewise quadratic fuel cost, and valve-point effective quadratic fuel cost functions were minimized using the GSA by Duman et al. in IEEE 30- and 57-bus test systems [1]. In 2015, test functions such as fuel cost, real power loss, and voltage deviation were minimized using the Chaotic Krill Swarm Algorithm (CKSA) by Mukherjee and Mukherjee in IEEE 57-bus and standard 26-bus test systems [22]. In 2016, the Glowworm Swarm Optimization (GSO) was used to minimize fuel cost and emissions in 75-bus and IEEE 30-bus test systems in India [23]. In 2017, fourteen different test functions such as total fuel cost, emissions, and active power loss were minimized in IEEE 30-, 57-, and 118-bus test systems using the Moth Swarm Algorithm (MSA) presented by Mohamed et al. [14].
Nowadays, the fossil fuels used for power generation in power systems have reached the stage of depletion. In addition, fossil fuels are responsible for the greenhouse effect caused by gas emissions such as COx, NOx, and SOx that lead to global warming problems. Accordingly, due to increasing environmental awareness and economic factors, a global majority have reached a consensus on the reduction of emissions and the use of renewable energy sources (RES). Wind power is a popular RES because it is sustainable, environmentally friendly, and economically beneficial. It has important advantages in terms of minimizing fuel costs and emissions. However, investment costs and noise pollution were not taken into consideration for this study. Today, researchers have included wind power in the solution of the OPF problem. In 2015, Panda and Tripathy solved the OPF problem by combining wind power generation units and fossil fuel power generation units in an IEEE 30-bus test system using the Modified Bacteria Foraging Algorithm (MBFA) [24]. In 2016, wind units were included in an IEEE 14-bus test system by Marley et al. and the OPF problem was solved using the quadratic programming technique [25]. Similarly, in another study presented in 2016, a real-time wind and solar power-incorporated OPF problem was solved by Reddy and Bijwe in an IEEE 30-bus test system [26]. Roy and Jadhav solved a wind power-integrated OPF problem using the Gbest-guided artificial bee colony (GGABC) algorithm in an IEEE 30-bus test system [27]. In 2019, an OPF problem with integrated wind and photovoltaic power was modeled by Duman et al. using differential evolutionary particle swarm optimization (DEPSO) in IEEE 30-, 57-, and 118-bus test systems [28]. Despite all this progress, the fact that the wind speed is uncertain in nature at any given time interval is an extremely serious problem. The Weibull Probability Distribution Function (PDF) in particular is frequently used for wind speed estimation in long-term distribution problems. In 2008, Hetzer et al. presented a novel model for the total cost of wind power and estimated the wind speed using the Weibull PDF [29]. In the OPF problem, the model created by Reddy included wind power, solar power, and an energy storage system. The Weibull PDF was used in the modeling because of the uncertainty of the wind power and solar power in nature. The presented GA method was tested in an IEEE 30-bus system [30]. Weibull and Lognormal PDFs were used by Biswas in an OPF problem integrated with RES because of the uncertainty of wind and solar power in nature [31].
Although existing heuristic algorithms are highly effective in solving optimization problems, new heuristic algorithms continue to be developed by researchers today. A heuristic algorithm should be effective in solving any problem in terms of two main features: exploration and exploitation. The exploration is the algorithm's ability to provide a wide variety of solutions and to change the best value in the search space for the obtained candidate solutions. On the other hand, when the exploitation takes place in the local search area, the algorithm's solution quality and convergence characteristic are improved [32]. The Coyote optimization algorithm (COA) is a new optimization algorithm that can be classified as evolutionary, heuristic, and swarm intelligence- and population-based. The COA was introduced by Pierezan and Coelho in 2018 [33]. The main inspiration of the COA was the behavior and adaptation of coyotes to their environment. In the study presented by the authors [33], the COA was found to be a successful solution that can be easily applied to the problem and can produce effective results. Moreover, in one study [34], the COA method was applied to the economic dispatch problem integrated with wind power. Although the results obtained in that study were effective, in order to enhance the performance of the COA and to obtain more effective solutions in complex power system problems, this algorithm as found in the literature needed further development. The Lévy Flight (LF) is one of the most important methods used in the improvement of heuristic algorithms. The LF is a random process based on α-stable distribution, where step lengths are expressed by heavy-tailed probability distribution. Using steps of different sizes provides the ability to move over large distances. The following are some examples of studies that have included the LF method in heuristic algorithms. Yang and Deb [35] used the LF to create a new cuckoo in the Cuckoo Search Algorithm (CSA). The LF method was used by Yang to develop the randomly generated value in the FA [36]. In other studies [37,38,39], the LF has been used in the Ant Colony Algorithm (ACA). In addition, the Lévy Flights Backtracking Search Algorithm (LFBSA) was presented by Zhang for parameter prediction in photovoltaic models [40].
In the study presented in this paper, wind units were integrated into conventional power systems consisting of classical thermal generators and the OPF problem including stochastic wind power was managed. The LCOA was developed using the LF method and implemented to solve the problem. The LCOA aimed to improve efficiency and find a feasible optimal solution for the OPF problem with stochastic wind power. The LF was added to the original COA to enhance optimum value and avoid local optima. The effect of the proposed LCOA was validated using the OPF problem, which contained several objective function conditions.
The outstanding features of the present study can be summarized as follows:
Specific features of the solved problem:
-
The single- and multi-objective optimization of the OPF problem involved thermal and wind power.
-
The Weibull PDF was applied in modeling stochastic wind power.
-
Equality and inequality constraints were considered in solving the OPF problem with stochastic wind power.
Novel contributions of this study:
-
The original COA method was developed by adding the LF to enhance optimum value and avoid local optima. Moreover, the exploration and exploitation features of the algorithm have been enhanced.
-
Although the solution time for the algorithm was extended because of the operator added to reach the optimum value, remarkably, this can be ignored in terms of reaching the best result.
-
The proposed LCOA method was tested with 25 different CEC-2005 benchmark test functions [41] and compared to other heuristic methods.
-
The OPF problem with stochastic wind power was solved using the COA and LCOA.
-
As a result of 30 restarts, problem solutions obtained with the LCOA and other methods were compared.
Accordingly, the rest of the article is organized in the following manner. The mathematical formulation of the OPF problem with stochastic wind power, along with the OPF formulation, the cost function of wind power, stochastic modeling of wind power, objective functions for 18 different cases, and constraints are included in Sect. 2. Section 3 explains in detail the LCOA method and its application in the OPF problem with stochastic wind power. Section 4 presents the results obtained for the CEC-2005 benchmark test functions using the LCOA and other methods, and the findings for 18 different objective functions in the OPF problem with stochastic wind power. The article ends with concluding remarks in Sect. 5.
2 Problem formulation
2.1 OPF formulation
In this paper, the OPF problem can be describe as finding the optimal solutions to minimize the objective function, which includes total cost-generating power from thermal and wind units, depending on equality and inequality constraints. The mathematical formulation of the OPF problem can be expressed as follows:
where, x vector consists of state variables and u vector consists of control variables, respectively. The objective function to be minimized is expressed as f(x, u), equality constraints are indicated as g (x, u), and h(x, u) refers to the inequality constraints, respectively. The vector \(x\) consists of the following state variables:
where \({P}_{TH{G}_{1}}\) corresponds to the active power of the generator in the slack bus and \({V}_{L}\) represents voltage magnitudes in the load bus; \({Q}_{THG}\) and \({Q}_{WS}\) are the reactive powers of the conventional thermal generators and wind units, respectively; \({S}_{l}\) refers to the transmission line load; NL, NTHG, and NTL are the numbers of load buses, thermal generators, and transmission lines, respectively.
Similarly, the vector \(u\) consists of the following control variables:
Control variables (\(u)\) consists of the generator’s active power \({P}_{THG}\) except for the slack generator (\({P}_{{THG}_{1}})\), the wind unit active power \({P}_{WS}\), the generator bus voltage \({V}_{G}\) (including wind and thermal generation systems), the reactive power of the shunt compensators \({Q}_{C}\), and transformer tap settings T. NG, NC, and NT are the numbers of voltage-controlled generator buses, shunt compensators, and tap regulating transformers, respectively.
2.1.1 Constraints of OPF problem
The constraints of the OPF problem are divided into equality and inequality constraints.
2.1.1.1 Equality constraints
g (x,u), which are expressed as equality constraints, can be defined in Eqs. (6) and (7) as follows:
where \({P}_{Gi}\) and \({Q}_{Gi}\) are the active and reactive powers of the \({i}{\rm th}\) generator; \({P}_{Di}\) and \({Q}_{Di}\) are the active and reactive demand powers of the \({i}{\rm th}\) bus; \({V}_{i}\) and \({V}_{j}\) are the voltages of the \({i}{\rm th}\) and \({j}{\rm th}\) bus, respectively; \({G}_{ij}\), \({B}_{ij}\), and \(({S}_{i}-{S}_{j})\) are the conductance, susceptance, and phase difference between the \({i}{\rm th}\) and the \({j}{\rm th}\) bus; NB is the total number of buses in the system.
2.1.1.2 Inequality constraints
In the system consisting of thermal and wind units, the minimum and maximum constraints of power outputs and voltage magnitudes are given in Eq. (8):
where \({P}_{{THG}_{i}}\) and \({Q}_{{THG}_{i}}\) are the active and reactive power output of the \({i}{\rm th}\) thermal generator, respectively; \({P}_{{WS}_{i}}\) and \({Q}_{{WS}_{i}}\) are the active and reactive power output of the \({i}{\rm th}\) wind system, respectively; \({V}_{{G}_{i}}\) represents the voltage magnitudes of the generator buses, and NW is the number of wind farms, respectively.
The load bus voltage and the transformers tap settings must be within the specified boundaries. In addition, transmission line loads and shunt VAR compensators are limited as follows. These constraints are given in Eq. (9).
where \({T}_{i,min}\) and \({T}_{i,max}\) refer to transformer minimum and maximum tap ratios and \({V}_{{L}_{{i}},min}\) and \({V}_{{L}_{i},max}\) are minimum and maximum voltage magnitude values. The lower and upper limits of the shunt VAR compensator are shown as \({Q}_{{c}_{i},min}\) and \({Q}_{{c}_{i},max}\), respectively, and \({S}_{li}\) and \({S}_{li,max}\) are the apparent power flow and its maximum value, respectively.
In this study, the fitness function in the OPF problem with wind power of can be generally expressed as follows:
where \({\lambda }_{{V}}\),\({\lambda }_{{P}}\),\({\lambda }_{{Q}}\),\({\lambda }_{{W}}\), and \({\lambda }_{{S}}\) are penalty factors. The constraint violations of the x state variables are shown in Eq. (11):
2.2 Wind power
2.2.1 Cost function of wind power
Although in nature, the wind speed is uncertain at any given time interval, it is possible to estimate wind speed using various methods. Because of this uncertainty, overestimation and underestimation of costs must be considered when calculating the cost of wind power in a system comprised of thermal generation units and wind units. Accordingly, wind power cost calculation is given in Eq. (12):
where \({P}_{W}{Cost}_{dir,j}\) is the direct cost of output wind power,\({{P}_{W}Cost}_{oe,j}\) and \({{P}_{W}Cost}_{ue,j}\) refer to the overestimation and underestimation costs of wind power, respectively. The \({{P}_{W}{Cost}}_{{dir},{j}}\) is expressed as in Eq. (13) [42]:
where \({q}_{j}\) is the direct wind power cost coefficient and \({w}_{j}\) is the power generated by the \({j}{\rm th}\) wind units. A method was developed that characterizes the effects of the overestimation and underestimation state [42, 43]. Accordingly, the \({{P}_{W}Cost}_{oe,j}\) is given in Eq. (14) [43]:
where \({C}_{rwj}\) and \({{E}({Y}}_{{oe},{j}})\) represent the overestimation cost coefficient and the expected value of the jth wind generator, respectively.
The Weibull PDF and Incomplete Gamma Function (IGF) were used to calculate the value of \({E(Y}_{oe,j}),\) and these equations are explained in Sect. 2.2.2. Accordingly, \({E(Y}_{oe,j})\) can be expressed as in Eq. (15):
and the underestimation cost is given in Eq. (16) [41]:
where \({C}_{pwj}\) and \({E(Y}_{ue,j})\) represent the underestimation cost coefficient and the expected value of the \({j}{\rm th}\) wind generator, respectively.
Similar to Eq. (15), the Weibull PDF and IGF equations described in Sect. 2.2.2 are also used when calculating \({E(Y}_{ue,j})\). Accordingly, \({E(Y}_{ue,j})\) is given in Eq. (17):
where \({c}_{j}\) and \({k}_{j}\) express the scaling and shape coefficients for the \({j}{\rm th}\) wind generation unit, respectively, Г(.) is the IGF and respectively, \({v}_{r},{v}_{in}, {v}_{out}\) indicate rated wind speed, cut-in wind speed, and cut-out wind speed; \({w}_{j}\) and \({w}_{r,j}\) represent the generated and rated power of the \({j}{\rm th}\) wind unit and \({v}_{1}\) is an intermediary parameter, as given in Eq. (18):
2.2.2 Stochastic modeling of wind power
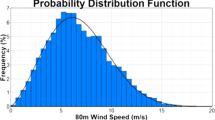
The most important problem in power systems integrated with wind power is the uncertainty of wind speed at any given time. For this reason, in this study, the Weibull PDF was used to estimate the wind speed and the IGF was used to characterize the wind speed. Accordingly, the Weibull PDF is given in Eq. (19):
where \(v\) represents the probability of wind speed and k and c represent the shape and scale coefficients, respectively [44]. The mean of the Weibull PDF is given in Eq. (20):
where Γ(x) represents the gamma function, which is given in Eq. (21):
A wind turbine can only start generating power when the wind speed reaches a certain level, referred to as the cut-in (\({v}_{in})\) speed. The wind turbine cannot generate power when the cut-in speed is below the wind speed level. The maximum power a turbine can reach at a given wind speed is called the rated power, and the maximum speed is the nominal speed (\({v}_{r}\)). If the wind speed exceeds certain values, the maximum speed at which wind turbines must be stopped to prevent damage to the turbine system is called the cut-out (\({v}_{out}\)) speed. Depending on the wind speed (\(v\)), the power output of a wind turbine is as expressed in Eq. (22):
The output power is zero when the wind speed (\(v\)) value is lower than the cut-in speed or greater than the cut-out speed. The wind turbine gives the rated power output \(({P}_{wr}\)) between the rated wind speed \(({v}_{r}\)) and the cut-out speed (\({v}_{out}\)). Probabilities are given for these discrete zones in Eqs. (23) and (24):
The probability calculation for the continuous region where the wind turbine power output is between the cut-in speed (\({v}_{in})\) and the rated wind speed (\({v}_{r}\)) is given in Eq. (25):
2.3 Objective functions of the OPF problem with stochastic wind power
2.3.1 Minimizing of thermal unit fuel and wind costs
Here, the total cost of thermal units and wind units is expressed as the objective function and its mathematical formulation is explained as follows:
where \({F}_{1}\) is the total cost, \({f}_{T}\) is the fuel cost of the thermal generators, \({f}_{w}\) is the cost of wind power, and \({a}_{i}\),\({b}_{i}\),\({c}_{i}\) are the cost coefficients of the \({i}{\rm th}\) generator; \({P}_{Gi}\) is the active power of the \({i}{\rm th}\) thermal generator and \({P}_{w}{Cost}_{dir,j}\),\({P}_{w}{Cost}_{oe,j}\), and \({P}_{w}{Cost}_{ue,j}\) are the direct cost, overestimation cost and underestimation cost of the \({j}{\rm th}\) wind power unit, respectively.
2.3.2 Minimizing of piecewise quadratic function and wind costs
In modern power systems, power generation can be obtained not only from a single source, but also from different types of sources such as oil, natural gas, and coal. Therefore, different types of fuel can be indicated as piecewise quadratic functions, as in Eq. (29):
where \({{a}}_{\text{ik}}\), \({{b}}_{\text{ik}}\), and \({{c}}_{\text{ik}}\) are the cost coefficients of the \({i}{\rm th}\) generator for k type of fuel. The objective function is given in Eq. (30):
2.3.3 Voltage stability enhancement in the power systems
In the event of a fault in the system, load variations such as an increase or decrease in power demand may cause instability in the voltage. By using the L-index (voltage stability index), a deviation or collapse from the steady state can be detected in the power system and necessary measures taken [45].
The level of voltage collapse of the \({j}{\rm th}\) bus can be defined using \({L}_{j}\) local indicators. The \({L}_{j}\), and \({F}_{ji}\) values are given in Eqs. (31) and (32), respectively [14]:
where NG and NL are the numbers of generator buses (PV) and load buses (PQ), respectively, and the \({Y}_{1}\) and \({Y}_{2}\) matrices in the formula are sub-matrices of the system YBUS matrix. In this case, the stability of the complete system is expressed as in Eq. (33):
2.3.4 Minimizing of power loss
The minimization of active power loss is expressed as in Eq. (34):
where \({G}_{m\left(ij\right)}\) is the conductance value of the \({m}{\rm th}\) line between buses i and j.
2.3.5 Minimizing of thermal unit fuel cost with valve-point effect and wind cost
Traditionally, the fuel cost function of each thermal unit is referred to as a quadratic function and the valve-point effect is not considered in the OPF problem. However, in reality, this causes errors in finding the best solution because cost function is non-convex and causes ripples in thermal generation units consisting of large steam turbines. Therefore, for a more realistic approach to solving the OPF problem, the valve-point effect was taken into account. However, the valve-point effect also leads to a significant increase in fuel costs.
The total fuel cost function with the valve-point effect is expressed in Eq. (35):
where \({\text{a}}_{\text{i}}\), \({\text{b}}_{\text{i}}\), \({\text{c}}_{\text{i}}\), \({\text{d}}_{\text{i}}\), and \({\text{e}}_{\text{i}}\) are the cost coefficients of the \({i}{\rm th}\) generator.
2.3.6 Minimizing of thermal unit fuel cost, wind cost, and emissions
Today, the fossil fuels used in power systems are responsible for the release of harmful gases such as COx, NOx, and SOx in the atmosphere. In addition to reducing costs, reducing emission pollution caused by harmful gases in the environment has become one of the main objectives of power systems problems. Various methods have been developed for the solution of multi-objective functions of power systems problems. In the multi-objective minimization process in this section, the objective function in Eq. (38) consists of the emission and fuel cost functions in Eqs. (36) and (37), respectively:
where \({F}_{6}\) is the objective function, \({f}_{T-W}\) is the total cost which consists of thermal units and wind units, \({f}_{E}\) is emission cost, and \({C}_{tax}\) is a weighting factor, which is considered as a balance between the objectives;\({\gamma }_{i}\),\({\beta }_{i}\),\({\alpha }_{i}\), \({\upzeta }_{{i}} , {\lambda }_{{i}}\) are the emission coefficients of the \({i}{\rm th}\) unit [14].
2.3.7 Minimizing of thermal unit fuel cost, wind cost, and power loss
Here, the main objective was to minimize the total fuel cost, wind power cost, and the active power losses, simultaneously. The multi-objective function consisting of fuel cost, wind cost, and power losses is given in Eq. (41):
where \({f}_{Ploss}\) is the total active power loss and \({\lambda }_{{p}}\) is the weighting factor.
2.3.8 Minimizing of thermal unit fuel cost, wind cost, and voltage deviation
The objective function here was to reduce the total cost and voltage deviations in the voltage values of the load buses. In the power system, the voltage profile is associated with reducing the voltage deviation. The multi-objective function, which consists of thermal unit fuel cost, wind cost, and voltage deviation, is given in Eq. (44):
where \({\lambda }_{{VD}}\) is the value of the weight factor.
2.3.9 Minimizing of thermal unit fuel cost, wind cost, and voltage stability
The main objective here was to reduce the total cost of thermal and wind units and the stability in the voltage values of the load buses. The multi-objective function, which consists of total cost and voltage stability, is given in Eq. (47):
where \({f}_{L}\) is the voltage stability indicator calculated using Eq. (33) and \({\lambda }_{{L}}\) is the value of the weight factor.
2.3.10 Minimizing of thermal unit fuel cost, valve-point effect, wind cost, and emissions
Here, the objective function consisted of minimizing the thermal fuel cost with the valve-point effect, wind cost, and the emission value with \({C}_{tax}\). This objective function is given in Eq. (50):
2.3.11 Minimizing of thermal unit fuel cost, wind cost, emissions, voltage deviation, and power loss
The main objective here was to minimize the total cost value, emission value, voltage deviation value, and power loss value simultaneously. This objective function is given in Eq. (55):
3 Levy Coyote optimization algorithm
3.1 Coyote optimization algorithm
The COA is a new optimization algorithm that was created by Pierazan and Coelho in 2018. The COA was inspired by the behavior of coyote species and is classified as an evolutionary, heuristic, swarm intelligence- and population-based algorithm [33].
Coyotes (Canis latrans) are a canine species living mostly in North America. These animals have sharp vision and a strong sense of smell. Coyotes form packs for more effective hunting in autumn and winter. In addition, coyotes can form family groups, and mainly in the spring, female coyotes can give birth to 3–12 pups [33]. In the COA, the ‘alpha’ represents the leader of the pack. When creating a coyote population, \({N}_{p}\) and \({N}_{c}\) indicate the numbers of packs and coyotes, respectively. Firstly, since the number of coyotes in each pack is the same, the population size is expressed as \({N}_{p}\)* \({N}_{c}\).
In the COA, decision variables consist of various factors such as snow depth, gender, social status, and temperature. The social condition for the \({c}{\rm th}\) coyote in the \({p}{\rm th}\) pack at the \({t}{\rm th}\) time is given in Eq. (56):
In the COA, any coyote in the entire population is a possible solution for the problem. First in COA, the global coyote population is initialized. The social conditions, in the beginning, are assigned at random for each coyote in the search space. Thus, the random values of the \({c}{\rm th}\) coyote in the \({p}{\rm th}\) pack for the \({j}{\rm th}\) dimension can be indicated as in Eq. (57) [33]:
where \({x}_{j}^{min}\) and \({x}_{j}^{max}\) are the maximum and minimum limits of the \({j}{\rm th}\) decision variable, and \({rnd}_{j}\) is a random value between ‘0′ and ‘1′ chosen by uniform probability.
In the COA, the social situation of the coyote that best adapts to the habitat is the fitness function and can be expressed as \({fit}_{c,}^{p,t}\in R\). The adaptation of the coyote, depending on the immediatesocial situation, is evaluated as in Eq. (58):
Coyotes sometimes leave their packs and they can be alone or move to another pack. Moving to another pack or leaving the pack occurs with Pe probability, as expressed in Eq. (59):
Thus, the diversification of the interactions among coyotes leads to the change of the global population. The alpha coyote that has the best fitness function in \({p}{\rm th}\) pack at time t is expressed as in Eq. (60) [33]:
The COA calculates the cultural tendency for each pack in the population, as the computation of the median social condition of coyotes. The cultural tendency calculation is given in Eq. (61) [33]:
where \({O}^{p,t}\) is the ranked social situation for coyotes in the \({p}{\rm th}\) pack at the \({t}{\rm th}\) time.
The second stage of the COA considers the death and birth of coyotes. The age of each coyote is computed by the COA and it is expressed as \({age}_{j}^{p,t}\in N\).
The birth of a coyote pup occurs using a uniform probability distribution, combined with the social conditions of two randomly selected parents and an environmental impact, as expressed in Eq. (62):
where \({r}_{c1}\) and \({r}_{c2}\) are random coyotes chosen from the \({p}{\rm th}\) pack, \({j}_{1}\) and \({j}_{2}\) are random dimensions, \({P}_{s}\) and \({P}_{a}\) are the scatter probability and association probability, respectively, \({R}_{j}\) is the random value inside of the decision variable for the \({j}{\rm th}\) dimension, and \({rnd}_{j}\) is a random value in the range of [0,1]. The \({P}_{s}\) and \({P}_{a}\) values in Eqs. (63) and (64) provide the cultural diversity in the pack.
where D is the dimension in the search space.
where \({P}_{a}\) provides the same impact for both parents.
In the COA, there is a death and birth situation for the static population size. Accordingly, the coyote pack that is less adaptable to the habitat compared to a new pup is expressed as ω, while the number of coyotes in this pack is indicated by ϕ. The birth and death situations are explained in Algorithm I as follows:

In the COA, there is an alpha effect ( \({\delta }_{1}\)) and a pack effect (\({\delta }_{2}\)) for the coyotes to demonstrate the cultural interaction within the packs. Random coyotes are selected using uniform probability distribution and \({\delta }_{1}\) and \({\delta }_{2}\) are expressed in Eqs. (65) and (66), respectively:
where \({cr}_{1}\) and \(c{r}_{2}\) are random coyotes of the pack.
Accordingly, using the alpha effect ( \({\delta }_{1}\)) and pack effect (\({\delta }_{2}\)), the new social condition of any coyote is updated using the following equation:
where \({r}_{1}\) and \({r}_{2}\) (randomly obtained values with uniform probability in the range of 0–1) are the weights of the alpha and pack effect, respectively.
The new social conditions are calculated as in Eq. (68):
In the COA, according to Eq. (69), the cognitive capacity of the coyote decides whether the social status of a given pup is better than that of an older one:
Finally, the social condition of the coyote that best adapts to the habitat is the best fitness value, and this value is a global solution. The pseudo-code of the COA is given in Algorithm II as follows [33]:

3.2 Lévy Coyote optimization algorithm
In the literature, the COA is shown as a novel and effective method. However, since it cannot avoid local points from time to time and in order to obtain more effective solutions to problems of wind power-integrated power systems, in the presented method, the Lévy Flight (LF) was used to improve the COA. The LF is a random process based on α-stable distribution, where step lengths are expressed by heavy-tailed probability distribution and provide the ability to move over large distances using steps of different sizes. There are two basic steps in generating random values using the LF. These are the selection of a random walk and the creation of a step by the selected Lévy distribution. In the LF, extremely long jumps can occur to avoid local optima [46]. Lévy distribution is a simple power-law formula and is expressed as in Eq. (70):
The small value of a allows the variable to make long jumps in the search field and prevents it from getting stuck in the local optima. With the large a value, it continues to obtain new values around the variable.
In the algorithm presented by Mantegna [47], random samples with the same behavior as Lévy Flight \({{L}}_{{i}}\) are produced, simulating α-stable distribution. This can be defined as in Eq. (71):
where the \({step}\) is the scaling size, ⊕ represents the entrywise multiplications, \(u=N(0,{\sigma }_{u}^{2})\) and \(y=N(0,{\sigma }_{y}^{2})\) are two normal stochastic distributions, with \({\sigma }_{u}\) and \({\sigma }_{y}\) expressed as follows:
As a result, by using the LF, the diversity in the population is increased by the short- or long-distance jumps of the variables, and a stronger global discovery is provided in the search area [48]. In the proposed LCOA, the aim was to improve the algorithm by using LF. The improvement was carried out at the stage of forming a new coyote pup from randomly selected parents. In Eq. (62), parents are randomly selected for the birth of a new pup. The randomly generated parents’ values were multiplied by the LF to create a new pup with better cultural diversity. The social conditions of the new pup were calculated according to the probabilities of Ps and Pa. This determined whether or not the pup would survive. The equation for the new pup obtained using the LF is as follows in Eq. (73):
A flow chart showing the improvement process for the LCOA and the probability of survival for a new pup is given in Fig. 1.

LCOA improvement process flow chart
4 Test results
In this section, firstly, an ablation study was performed to verify the effectiveness of the LF operator. Then, the experimental results of the proposed algorithm were presented on 25 different benchmark test cases in CEC-2005 [41]. Finally, the OPF problem with stochastic wind power was solved using the COA and LCOA.
4.1 Ablation study
The ablation study is an effective analysis method that aims to answer more localized parameter importance questions [49]. In [50], the authors demonstrated that a few parameter changes between two parameter configurations provide performance improvement in the algorithm. In [51], the authors performed an ablation study in the Differential Evolution Ridesharing Algorithm (DERA) method with four reduced versions of the proposed method to demonstrate the importance of each operator. In [52, 53], an ablation study was presented to show the effect of the operators used in the proposed algorithms.
In this study, the original COA method [33] was developed by adding the LF operator to enhance optimum value and avoid local optima. In order to understand the development part of the proposed algorithms and to show this part's contribution, we performed an ablation study in this study case. In the ablation study, to verify the effectiveness of the LF operator, the case in which the LF operator had included in the study (LCOA) and the case where the LF operator had removed (COA) has been compared using 25 different benchmark test cases in CEC-2005 [41]. In the proposed LCOA and COA method, the values were determined as Np = 20 and Nc = 5, i.e., the population size was 100. The maximum iteration number was chosen as 5000. For the LCOA and COA, the average error (AVR) and standard deviation (SD) values obtained by 30 restarts of the CEC-2005 30-dimensional test functions are given in Table 1.
From all the results presented in Table 1, compared with the COA, the LCOA provided better results for 20 benchmark test functions (F1, F2, F3, F4, F5, F6, F8, F9, F10, F11, F12, F13, F14, F15, F16, F17, F18, F19, F22, and F24) and there are 5 values where the two methods present same results (F7, F20, F21, F23, F25). Accordingly, it can be said that the addition of the LF operator given in better results compared to the case in which the LF operator was removed.
4.2 Case study A: results from CEC-2005 benchmark test functions
In this study case, first, the LCOA was tested in 30 dimensions for 25 different cases in the CEC-2005 test functions [41]. In the proposed LCOA method, the values were determined as Np = 20 and Nc = 5, i.e., the population size was 100. The maximum iteration number was chosen as 5000. The results were compared with other effective methods in the literature including the Coyote optimization algorithm (COA), particle swarm optimization (PSO), artificial bee colony (ABC), symbiotic organisms search (SOS), grey wolf optimization (GWO), bat-inspired algorithm (BA), and firefly algorithm (FA) [33].
For each algorithm, the average error (AVR) and standard deviation (SD) values obtained by 30 restarts of the CEC-2005 30-dimensional test functions are given in Table 2. The 25 different benchmark test functions were divided into four categories: unimodal (F1–F5), shifted and rotated basic multimodal (F6–F12), expanded multimodal (F13–F14), and hybrid composition functions (F15–F25) [41]. As can be seen from Table 2, in the first group, the unimodal functions (F1–F5), LCOA, and SOS, presented the best results among all the algorithms. Moreover, the COA provided better results compared to the PSO, ABC, GWO, BA, and FA. For the second group (F6–F12), the LCOA had the best performance among all the algorithms, followed by the ABC method, which yielded better results compared to the other algorithms except for the LCOA. In group 3, although the other algorithms were in close proximity to each other for the expanded multimodal functions (F13–F14), the LCOA was the method that provided the best results for both benchmark test functions. Group 4 consists of a very complex structure because hybrid composition functions (F15–F25) have multiple local optima similar to those of real-world optimization problems. As shown in Table 2, the LCOA presented the best results for group 4, followed by the COA, which also provides better results compared to the other algorithms except for the LCOA.
Of all the results presented in Table 2, the LCOA provided best results for 14 benchmark test functions (F3, F5, F7, F10, F12, F13, F14, F15, F16, F17, F19, F22, F23, and F25). One important criterion for the algorithm’s success is to give the best results for 14 test functions, but this alone is not enough. The proposed LCOA method yielded the second-best values for eight benchmark test functions (F2, F4, F6, F8, F9, F1, F20, and F21) and gives the third-best for three benchmark test functions (F1, F11, and F24).
To express the success of the algorithms more accurately and in order to choose the most successful among the algorithms, the Formula 1 Scoring System was used for 25 different CEC-2005 30-dimensional benchmark test functions, and the ranking was established accordingly. The Formula 1 Scoring System [54] for the CEC-2005 test functions is given in Table 3. If the two algorithms presented the same value, both were evaluated by giving equal points. The Formula 1 scores for the proposed methods are given in Table 4. In addition, the general total score and ranking values according to the proposed methods are given in Table 5.
Table 4 clearly shows that the most effective algorithm was the LCOA, according to the Formula 1 total score for the 25 different CEC-2005 30-dimensional benchmark test function simulation results for the 30-restart run.
4.3 Case study B: results from test systems OPF problem with wind power
In this study case, IEEE 30-, 57-, and 118-bus test systems were used to solve the problem of the wind power-integrated OPF. Eighteen different cases considered as objective functions were analyzed for each test system as stated in Table 6.
The number of iterations for each algorithm was determined as 5000, and to validate the effect of the algorithms, they were run 30 times for each case. The resulting optimal control variables are given in various tables in this section. The characteristic features of the IEEE 30-, 57-, and 118-bus test systems were taken from literature studies [55, 56]. The parameters of the test systems are given in Table 7.
-
IEEE 30-bus test system
The LCOA was tested using the IEEE 30-bus system given in Fig. 2. In the test system, a wind farm consisting of 25 and 20 wind turbines was added to the generators instead of the 5th and 11th buses, respectively. The Weibull parameters and all other wind power parameters used to determine the stochastic wind power are given in Table 8 [44].

Modified IEEE 30-bus test system integrated with wind power
The direct cost coefficients q5 and q11 were chosen as 1.60 and 1.75 for the W5 and W11 wind power units, respectively. The reserve cost and penalty cost coefficients were, respectively, Crw5 and Crw11 = 3 and Cpw5 and Cpw11 = 1.5. The parameters used in the wind power cost calculation, data of the buses, and transmission lines were taken from the literature [44]. The active and reactive power demands of the IEEE 30-bus test system integrated with wind power were 283.4 MW and 126.2 MVAR, and the optimal solutions obtained by the LCOA for 11 different objective functions are presented in more detail in Table 9.
In Case 1, the total cost consisted of thermal fuel cost and wind cost. Since this was a single-objective minimization problem, the fitness function value was equal to the total cost. Accordingly, as seen in Table 10, the total cost from the tested LCOA was 792.2239 $/h. Table 10 also presents the simulation results from the other methods, including the COA, MSA, GA, and PSO. According to the results in Table 10, the LCOA yielded the minimum cost for Case 1. The proposed LCOA result was, respectively, 0.0013 $/h cheaper than the COA, 0.1858 $/h cheaper than the MSA, 0.1534 $/h cheaper than the GA, and 1.4553 $/h cheaper than the PSO. Although the difference between the compared methods was seen as fractional, the difference in minimum costs increases with the size of the system. Moreover, as can be seen from Table 10, according to the best and average values, the standard deviation obtained was low. This demonstrated that the LCOA had reached an optimum value or near to it in the run. In Case 2, the piecewise cost function was minimized, and since the optimization problem was for a single-objective, the total cost was equal to the fitness function value. As can be seen in Table 10, the result from Case 2 using the LCOA method was 630.9465 $/h. The LCOA had the minimum value compared to the results from the COA, PSO, MSA, and GA methods. In Case 3, the main objective was only to minimize the voltage stability inductor. Therefore, the fitness function was equal to the L-index value. When the L-index is near to ‘0,’ the load bus voltage is stable, whereas when it is near to ‘1,’ the power system could be in a collapsing stage. According to Table 10, the LCOA had an L-index value of 0.136350, indicating that the load bus voltage was in the stable range and that it was the best method compared to the other algorithms. In Case 4, the main objective was only to minimize the active power loss. Power systems consist of many transmission lines that cause high active power loss. For this reason, minimization of active power loss is very important for large-scale systems. According to the simulation results in Table 10, the LCOA had the minimum active power loss values, with 1.8894 MW. In Case 5, a single-objective function was optimized and the main objective was to minimize total cost considering the valve-point effect and wind power cost. In real-life power system optimization problems, the cost function is non-convex and causes ripples in the large steam turbine thermal generation units. Therefore, the valve-point effect was taken into consideration. According to the simulation results for Case 5 in Table 10, the cost obtained by the LCOA was 807.2618 $/h. This was the best value compared to the results from the other algorithms. Furthermore, compared to Case 1, it is clear that the valve-point effect caused a significant increase in cost. In Case 6, the test study was a multi-objective optimization problem where the total cost and emissions of the system consisting of wind power units and thermal units were minimized simultaneously. In this case, the multi-objective functions were converted into single-objective functions using the weight factors (Ctax) in Eq. (38) and the Ctax value was taken as 20. As can be seen from Table 9, the obtained total cost and emission values using the LCOA were 792.2523 $/h and 0.2331 t/h, respectively. The fitness function value obtained using the LCOA was 796.9160. Today, in real-life optimization problems, emissions are expected to be at minimum values and the total cost value not to be high. In this regard, the fitness value obtained in Case 6 was remarkable. According to Table 9, when Case 6 and Case 1 are compared, it can be seen that a slight decrease in the amount of emissions caused a slight increase in the total cost. Accordingly, it is important to balance the cost and emission. The results in Table 10 show that the LCOA was the best method for Case 6. For Case 7, the main objective in the system consisting of thermal units and wind units was to minimize the total cost and active power loss simultaneously. In this multi-objective case study, the total cost and active power loss values obtained using the LCOA were 792.2523 $/h and 6.4920 MW, respectively. In Eq. (41), the \({\lambda }_{{p}}\) is the weighting factor, and this was chosen as \({\lambda }_{{p}}\)= 40. When the fitness function values in Eq. (41) and Table 9 are examined, it can be seen that the LCOA yielded the best solution with the fitness value of 953.4626. According to the simulation results in Table 10 for Case 7, the LCOA was the best method compared to the results from the other algorithms. For Case 8, the main objective was to minimize total cost and voltage deviation simultaneously. For this multi-objective optimization problem, the \({\lambda }_{{VD}}\) weighting factor value in Eq. (44) was considered to be = \({\lambda }_{{VD}}\)100. The total cost value and voltage deviation value were 794.3648 $/h and 0.1305 p.u, respectively. Here, according to Table 9, compared to all other cases, the minimum voltage stability value was obtained depending on the objective function. For example, compared to Case 1, there was a significant increase in total cost value. According to Eq. (44) and Table 10, the fitness value presented by the LCOA value of 807.4238 was the minimum fitness value compared to the results from the other methods. In Case 9, the main objective was to minimize total cost and voltage stability simultaneously. The \({\lambda }_{{L}}\) weight factor in Eq. (47) was used to convert the multi-objective function to a single-objective function and was chosen as \({\lambda }_{{L}}\)=100. The total cost value and L-index voltage stability value were 792.2424 $/h and 0.1371, respectively. Table 10 shows that the LCOA had the best fitness function result for this optimization problem, with 805.9569, compared to the COA, MSA, GA, and PSO methods. For Case 10, the total cost consisted of the wind and thermal fuel costs with the valve-point effect and emissions minimized simultaneously. The value of Ctax, which is expressed in Eq. (50), was chosen as 20. Respectively, the total cost and emission values were 807.2638 $/h and 0.2135 t/h. Compared to Case 10 and Case 1, the emissions were reduced and the valve point effect was considered in the system. For this reason, there was a significant increase in the total cost. In this multi-objective case study, according to Eq. (50) and Table 10, the fitness function result with the LCOA was 811.5348, which was the best value compared to the other methods. In Case 11, the objective function consisted of minimizing the total cost, emissions, active power loss, and voltage deviation simultaneously. As can be seen in Table 9, using the LCOA, these results were, respectively, 830.1017 $/h, 0.1570 t/h, 3.2674 MW, and 0.3364 p.u. In addition, the values of \({\lambda }_{{E}}\), Ctax, \({\lambda }_{{VD}}\), and \({\lambda }_{{p}}\), as expressed in Eq. (55), were chosen as 19, 20, 21, and 22, respectively. According to Eq. (55) and Table 10, the best fitness function value was calculated as 968.7263 using the LCOA. Accordingly, the LCOA also provided the best result in a comprehensive multi-objective problem for Case 11, in which various objective functions were simultaneously optimized.
-
IEEE 57-bus test system
The LCOA was tested using the IEEE 57-bus system given in Fig. 3. In the test system, wind farms consisting of 50 and 40 wind turbines were added to the generators instead of the 6th and 9th buses, respectively.

Modified IEEE 57-bus test system integrated with wind power
The wind power parameters for this test system are given in Table 11. The direct cost coefficients q6 and q9 were chosen as 1.60 and 1.75 for the W6 and W9 wind power units, respectively, and the reserve cost and penalty cost coefficients were Crw6 and Crw9 = 3 and Cpw6 and Cpw9 = 1.5, respectively [44].
The generator cost coefficients are given in Table 12 [57]. Data on buses and transmission lines are given in detail in the literature [57]. The active and reactive power demands of the IEEE 57-bus test system integrated with wind power were 1250.8 MW and 336.4 MVAR. The optimal solutions obtained by the LCOA for five different objective functions are presented in more detail in Table 13.
In Case 12, the objective function was to minimize the total cost, consisting of the basic thermal fuel cost and wind cost. In this single-objective case, the total cost value obtained by LCOA was 31,595.742$/h. According to the results in Table 14, the LCOA presented slightly better result than the COA in solving the problem, and when compared with the other algorithms, the difference in total cost was further increased in the IEEE 57-bus system, which is a larger power system compared to the IEEE 30-bus system. The result from the proposed LCOA was, respectively, 0.356 $/h cheaper than the COA, 48.511 $/h cheaper than the MSA, 41.797 $/h cheaper than the GA, and 1804.584 $/h cheaper than the PSO. In Case 13, the multi-objective function consisted of minimizing the basic fuel cost, integrated wind power cost, and voltage deviation simultaneously. In this case, the \({\lambda }_{{VD}}\) value in Eq. (44) was considered to be 100. According to Table 13, compared to Case12, consisting of a single-objective function, Case13 had a lower voltage deviation. However, accordingly, the total cost and fitness value increased. As can be seen in Table 16, the LCOA had the best result with a fitness value of 31,701.249 compared to the other algorithms. For Case 14, in the test system comprised of wind power units and thermal units, the objective function was to minimize total cost and voltage stability simultaneously. The \({\lambda }_{\mathbf{L}}\) value in Eq. (47) was considered to be 100. The obtained total cost and L-index voltage stability results were 31,595,956 $/h and 0.2797, respectively. The L-index value revealed that the load bus voltage was stable. According to Table 16, the result from the LCOA was 31,624.057, which was the minimum fitness value compared to the results from the other methods. For Case 15, the objective function was to minimize total cost and emissions simultaneously in the test system consisting of wind power and thermal units. The emission coefficients in Eq. (37) are given in Table 14 [57], and the Ctax value in Eq. (38) was considered as 20. In this multi-objective study case, the total cost and emission values were 31,594,246 $/h and 1.1265 (t/h), respectively. According to the results in Table 15, the minimum emission value for the IEEE 57-bus system was obtained in Case 15. According to Table 16, the best fitness value was 31,618.568 using the LCOA, and this value was, respectively, 0.279 lower than the COA, 31.81 lower than the MSA, 50.076 lower than the GA, and 1473.642 lower than the PSO, i.e., for Case 15, the LCOA was the best method compared to the COA, MSA, GA, and PSO.
In Case 16, the main objective was to minimize the total cost, consisting of thermal fuel cost with valve-point effect and wind cost. In this single-objective case study, the generator cost coefficients with the valve-point effect expressed in Eq. (42) are included in Table 15 [57]. The valve-point effect is important for real-life optimization problems. Compared with the quadratic basic total cost in Table 13, the valve point effect led to a significant increase in the fitness value. Table 16 shows that the result of the proposed LCOA was 31,639.926, which was the best result for Case 16 compared to those of the other methods.
The fitness values using the LCOA compared with those of the other methods are given in Table 15 for all cases of the IEEE 57-bus test system. The table shows that the LCOA presented the best results compared with the COA, MSA, GA, and PSO for all cases in the IEEE 57-bus test system.
-
IEEE 118-bus test system
The LCOA was tested using the IEEE 118-bus system. In the test system, wind farms consisting of 50, 40, 40, 50, 50, and 40 wind turbines were added to the generators instead of the 15th, 32th, 49th, 55th, 104th, and 112th buses, respectively.
The wind power parameters for this test system are given in Table 17 [57]. The direct cost coefficients q15, q55, and q104 were chosen as 1.60, and q32, q49, and q112 were chosen as 1.75, respectively. The reserve and penalty cost coefficients were Crwj = 3 and Cpwj = 1.5for all wind power generation units, respectively.
The generator cost coefficients are given in Table 18 [57]. Data on the buses and transmission lines are given in detail in the literature [57].
The demands for active and reactive power in the modified IEEE 118-bus system that included wind units were 4242 MW and 1439 MVAR, respectively. In addition, optimal solutions obtained by the LCOA for the two different objective functions of the modified IEEE 118-bus test system are given in Table 19.
Case 17 considered the single-objective OPF problem consisting of thermal fuel cost and wind cost. In this case, the LCOA, COA, MSA, GA, and PSO methods aimed to minimize the total cost value. The result obtained from the LCOA was 109,612.33 $/h, i.e., according to Table 20, the LCOA was, respectively, 53.89 $/h cheaper than the COA, 3238.42 $/h cheaper than the MSA, 7362.83 $/h cheaper than the GA, and 54,102.50 $/h cheaper than the PSO. Therefore, the LCOA was seen as the best method for Case 17. In addition, compared to the basic total cost values obtained from the IEEE 30-bus and IEEE 57-bus systems, the fitness value differences among the methods applied to the problem were more remarkable in the a large-scale power system IEEE 118 bus. In Case 18, the main objective was to minimize the active power loss. The result from the LCOA was 17.4556 MW. For Case 18, the LCOA was the best algorithm for minimum power loss values compared to the other algorithms. In addition, Table 20 presents the fitness values using the LCOA compared to those of the other methods for the IEEE 118-bus test system. The LCOA was seen to present the best results for both cases in the IEEE 118-bus test system compared with those of the COA, MSA, GA, and PSO methods.
5 Conclusions
In modern power systems, the OPF problem has existed for many years and continues to be one of the most fundamental problems today. This study managed the OPF problem in power systems using stochastic wind power, and the proposed problem was tested on modified IEEE 30-, 57-, and 118-bus test systems with wind power units, using different test cases and considering various constraints. In the mathematical modeling of the problem, since the wind speed was uncertain for any given time interval, the Weibull PDF was used to estimate the wind speed. In addition, overestimation and underestimation costs of wind speed were calculated and included in the objective function with reserve and penalty costs. In the solution of the problem, the COA, which is an evolutionary, heuristic, and swarm intelligence-based method, was further developed using the LF method. By adding the LF operator, the exploration and exploitation feature of the algorithm were enhanced. Furthermore, hitting local optima was avoided and the optimum value was increased. Although the solution time for the algorithm was extended because of the operator added to reach the optimum value, remarkably, this can be ignored in terms of reaching the best result. The improvement was found to be successful when the obtained LCOA was implemented using the CEC-2005 test functions. In the next stage, the LCOA method was applied successfully to the OPF problem with stochastic wind power for 18 different cases. To validate the effect of the LCOA method, the LCOA results were compared with those of the COA, MSA, PSO, and GA methods. Accordingly, it was clearly seen that the LCOA provided more effective results for the OPF problem with stochastic wind power. In the future, based on these effective results, the LCOA method can be used to solve the OPF and various problems in larger power systems using different combined renewable energy sources.
References
Duman S, Güvenç U, Sönmez Y, Yörükeren N (2012) Optimal power flow using gravitational search algorithm. Energy Convers Manag 59:86–95
Sönmez Y, Güvenc U, Duman S, Yörükeren N (2012) Optimal power flow incorporating FACTS devices using gravitational search algorithm. In: 2012 international symposium on innovations in intelligent systems and applications (INISTA), pp 1–5, IEEE
He S, Wen JY, Prempain E, Wu QH, Fitch J, Mann S (2004) An improved particle swarm optimization for optimal power flow. In: International conference on power system technology (POWERCON), Singapore, pp 1633–1637
Abido MA (2002a) Optimal power flow using tabu search algorithm. Electr Power Compon Syst 30(5):469–483
Glover JD, Sarma MS (2002) Power system analysis and design, 3rd edn. Brooks/Cole, New York, pp 275–276
Yan X, Quintana VH (1999) Improving an interior-point-based off by dynamic adjustments of step sizes and tolerances. IEEE Trans Power Syst 14(2):709–716
Olofsson M, Andersson G, Söder L (1995) Linear programming based optimal power flow using second order sensitivities. IEEE Trans Power Syst 10(3):1691–1697
Sun DI, Ashley B, Brewer B, Hughes A (1984) Optimal power flow by newton approach. IEEE Trans Power Appar Syst 3(10):2864–2880
Santos A, Deckmann S, Soares S (1988) A dual augmented Lagrangian approach for optimal power flow. IEEE Trans Power Syst 3(3):1020–1025
Osman MS, Abo-Sinna MA, Mousa AA (2004) A solution to the optimal power flow using genetic algorithm. Appl Math Comput 155(2):391–405
A. Bhattacharya and P.K. Roy “Solution of multi-objective optimal power flow using gravitational search algorithm,” IET Generation, Transmission, Distribution vol.6, no.8, pp.751–763,2012
Roy PK, Paul C (2015) Optimal power flow using krill herd algorithm. Int Trans Electr Energy Syst 25(8):1397–1419
Abido MA (2002b) Optimal power flow using particle swarm optimization. Int J Electr Power Energy Syst 24(7):563–571
Mohamed A-AA, Mohamed YS, El-Gaafary AAM, Hemeida AM (2017) Optimal power flow using moth swarm algorithm. Electr Power Syst Res 142:190–206
El Ela AAA, Abido MA, Spea SR (2010) Optimal power flow using differential evolution algorithm. Electr Power Syst Res 80(7):878–885
Mahdad B, Srairi K (2015) Blackout risk prevention in a smart grid based flexible optimal strategy using Grey Wolf-pattern search algorithms. Energy Convers Manag 98:411–429
Manoranjitham GE, Shunmugalatha A (2015) Application of firefly algorithm on optimal power flow control incorporating simplified impedance UPFC model. Int J Electr Power Energy Syst 71:358–363
El-Fergany A, Hasanien HM (2019) Salp swarm optimizer to solve optimal power flow comprising voltage stability analysis. Neural Comput Appl. https://doi.org/10.1007/s00521-019-04029-8.Inpress
Roa-Sepulveda CA, Pavez-Lazo BJ (2003) A solution to the optimal power flow using simulated annealing. Int J Electr Power Energy Syst 25(1):47–57
Bouktir T, Slimani L, Belkacemi M (2004) A genetic algorithm for solving the optimal power flow problem. Leonardo J Sci 4(4):44–58
Dutta P, Sinha AK (2006) Voltage stability constrained multi-objective optimal powerflow using particle swarm optimization. In: First international conference on industrial and information systems (ICIISs), Sri Lanka, pp 161–166
Mukherjee A, Mukherjee V (2015) Solution of optimal power flow using chaotic krill herd algorithm. Chaos Solitons Fract 78:10–21
Reddy SS, Rathnam CS (2016) Optimal power flow using glowworm swarm optimization. Int J Electr Power Energy Syst 80:128–139
Panda A, Tripathy M (2015) Security constrained optimal power flow solution of wind-thermal generation system using modified bacteria foraging algorithm. Energy 93:816–827
Marley JF, Vrakopoulou M, Hiskens IA (2016) An AC-QP optimal power flow algorithm considering wind forecast uncertainty. In: Innovative smart grid technologies-Asia (ISGT-Asia), Melbourne, Australia, pp 317–323
Reddy SS, Bijwe PR (2016) Day-ahead and real time optimal power flow considering renewable energy resources. Int J Electr Power Energy Syst 82:400–408
Roy R, Jadhav HT (2015) Optimal power flow solution of power system incorporating stochastic wind power using Gbest guided artificial bee colony algorithm. Int J Electr Power Energy Syst 64:562–578
Duman S (2019) Optimal power flow of power systems with controllable wind-photovoltaic energy systems via differential evolutionary particle swarm optimization. Int Trans Electr Energy Syst. https://doi.org/10.1002/2050-7038.12270
Hetzer J, Yu DC, Bhattarai K (2008) An economic dispatch model ıncorporating wind power. IEEE Trans Energy Convers 23(2):603–611
Reddy SS (2017) Optimal power flow with renewable energy resources including storage. Electr Eng 99(2):685–695
Biswas PP, Suganthan PN, Amaratunga GAJ (2017) Optimal power flow solutions incorporating stochastic wind and solar power. Energy Convers Manag 148:1194–1207
Duman S (2018) A modified moth swarm algorithm based on an arithmetic crossover for constrained optimization and optimal power flow problems. IEEE Access 6:45394–45416
Pierazan J, Coelho LDS (2018) Coyote optimization algorithm: a new metaheuristic for global optimization problems. In: IEEE congress on evolutionary computation (CEC), pp 1–8
Güvenc U, Kaymaz E (2019) Economic dispatch integrated wind power using Coyote optimization algorithm. In: Proceedings of the 2019 7th international Istanbul smart grids and cities congress and fair (ICSG), Istanbul, Turkey, pp 179–183, 25–26 April 2019
Yang X, Deb S (2013) Multi-objective cuckoo search for design optimization. Comput Oper Res 40:1616–1624
Yang XS (2010) Firefly algorithm, Levy flights and global optimization. Research and development in intelligent systems XXVI. Springer, London, pp 209–218
Candela R, Cottone G, Scimemi GF, Sanseverino ER (2009) Lévy flights for ant colony optimization in continuous domains. In: Mathematical theory and computational practice fifth conference on computability in Europe, Heidelberg, Germany, pp 79–88
Candela R, Cottone G, Scimemi GF, Sanseverino ER (2010) Composite laminates buckling optimization through Lévy based ant colony optimization. In: 23rd international conference on industrial engineering and other applications of applied intelligent systems, Cordoba, Spain, pp 288–297
Cottone G, Pirrotta A, Scimemi GF, Sanseverino ER (2010) Damage identification by Lévy ant colony optimization. In: Straub D (ed) Reliability and optimization of structural system. Taylor & Francis, London, pp 37–44
Zhang Y, Jin Z, Zhao X, Yang Q (2020) Backtracking search algorithm with Lévy flight for estimating parameters of photovoltaic models. Energy Convers Manag 208:112615
Suganthan PN, Hansen N, Liang JJ, Deb K, Chen Y-P, Auger A, Tiwari S (2005) Problem definitions and evaluation criteria for the CEC 2005 special session on real-parameter optimization, May 2005
Morshed MJ, Asgharpour A (2014) A hybrid imperialist competitive-sequential quadratic programming (HIC-SQP) algorithm for solving economic load dispatch with incorporating stochastic wind power: a comparative study on heuristic optimization techniques. Energy Convers Manag (Elsevier) 84:30–40
Liu X, Xu W (2010) Minimum emission dispatch constrained by stochastic wind power availability and cost. IEEE Trans Power Syst 25(3):1705–1713
Güvenç U, Duman S, Kaymaz E (2018) Economic dispatch of power system including wind power using salp swarm algorithm. Presented at 7th international conference on advanced technologies (ICAT'18), Antalya, Turkey
Kessel P, Glavitsch H (1986) Estimating the voltage stability of a power system. IEEE Trans Power Deliv 1(3):346–354
Barthelemy P, Bertolotti J, Wiersma DS (2008) A Lévy flight for light. Nature 453:495–498
Mantegna RN, Stanley HE (1994) Stochastic process with ultraslow convergence to a Gaussian: the truncated Lévy flight. Phys Rev Lett 73(22):2946
Yu JT, Kim CH, Wadood A, Khurshiad T, Rhee S (2019) Self-adaptive multi-population JAYA algorithm with Lévy flights for solving economic load dispatch problems. IEEE Access 7:21372–21384
Biedenkapp A, Lindauer MT, Eggensperger K, Hutter F, Fawcett C, Hoos HH (2017) Efficient parameter importance analysis via ablation with surrogates. In: AAAI, pp 773–779
Fawcett C, Hoos H (2016) Analysing differences between algorithm configurations through ablation. Journal of Heuristics 22(4):431–458
Zhang X, Zhang X (2020) Aset-based differential evolution algorithm for QoS-oriented and cost-effective ride sharing. Appl Soft Comput J 96:1–11
Zheng W, Gou C, Yan L, Wang F-Y (2019) Differential-evolution based generative adversarial networks for edge detection. In: CVPR workshops
Li L, Wei Z, Hao J-K, He K (2020) Probability learning based tabu search for the budgeted maximum coverage problem. arXiv:2007.05971 [cs.AI]
2019 Formula One World Championship Scoring System. https://en.wikipedia.org/wiki/2019_Formula_One_World_Championship#Scoring_system
Alsac O, Stott B (1974) Optimal load flow with steady-state security. IEEE Trans Power Appar Syst 93(3):745–751
Zimmerman RD, Murillo-Sánchez CE, Thomas RJ (2018) Matpower. https://www.pserc.cornell.edu/matpower/. Accessed 31 Oct 2018
Hınıslıoğlu Y (2018) Kaotik güve sürüsü algoritması kullanarak rüzgar gücü entegreli optimal güç akışı. M.Sc. thesis, Department of Electrics & Electronics and Computer Engineering, Duzce University, Duzce, Türkiye
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kaymaz, E., Duman, S. & Guvenc, U. Optimal power flow solution with stochastic wind power using the Lévy coyote optimization algorithm. Neural Comput & Applic 33, 6775–6804 (2021). https://doi.org/10.1007/s00521-020-05455-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-020-05455-9