
Abstract
This paper proposes an enhanced version of grey wolf optimizer (EGWO) to solve the coordination problem of directional overcurrent relays (DOCRs). The EGWO is proposed to improve the convergence characteristics and computation time of the conventional grey wolf optimizer (GWO) by selecting a suitable balance between exploration and exploitation phases. This balance is achieved by exponential decreasing of the control parameter during the iterative process. The EGWO is explored in all search space during predetermined iterations, and then it fast converges to the best optimal solution by local exploitation around the optimal solutions. The proposed optimization technique is applied to solve the coordination problem of DOCRs. The main objective of optimal coordination of DOCRs is to minimize total operating time of all primary relays with sustaining the selectivity between relay pairs. The feasibility and performance of the proposed technique for solving the coordination problem of DOCRs are investigated using four different systems, compared with several well-known techniques. The obtained results prove the effectiveness and superiority of the proposed technique compared with these techniques. The proposed technique is able to find the optimal relay settings and minimize the total operating time of relays (with a reduction ratio about 19.3995% relative to the conventional GWO) without any miscoordination. In addition, DIgSILENT PowerFactory is used to validate the proposed technique.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The complexity of power system operation is increasing as the size of the power system is increasing rapidly. Protection relays play an important role in keeping the reliability of power system at a high level [1]. The main objective of a protective relay is to identify and isolate the faulted elements and keep the non-faulted elements in service or, at least, minimize damage in the system due to abnormal conditions [2]. DOCRs are generally applied in the protection of sub-transmission and distribution systems [3]. DOCRs calculate the direction of a fault by comparing the phase angles of currents, or the phase angle of a current with that of voltage to determine the direction of a fault [4]. DOCRs operate when the current magnitude exceeds a reference current (pickup current) and flows in front of relay [5]. If the fault is located behind the relay, then no action will be taken [6]. The operating time of DOCRs is based on pickup current (Ip) or plug setting (PS) and time dial setting (TDS). The right selection of these settings plays an important role in the optimal coordination of DOCRs [7]. The reliable coordination of DOCRs means that the primary relay should isolate the fault in its own zone quickly to limit the system outage to the smallest area. The backup relay should be operated after a specified time delay to clear the fault in case primary relay failed to operate [8]. Hence, the main objective of optimal coordination of DOCRs is to find suitable relay settings which minimizes the operating time of DOCRs. Different techniques have been proposed to solve the coordination problem of DOCRs. Firstly, the calculation of relay settings was done manually. This calculation was very time-consuming and inappropriate practically [9]. Then, the trial-and-error technique was initiated to find the optimal relay setting using computers [10]. This technique has a slow rate of convergence, and the obtained TDS values of relays using this approach are relatively high which increases the stress on electrical equipment and leads to reduce their life or even damage [8]. In the late 1980s, linear programming (LP) techniques, including two-phase simplex methods [11], simplex [12], Big-M methods [13], dual simplex [12], have been used to solve the coordination problem of DOCRs [14]. In this technique, the operating time of DOCRs is optimized by TDS in which Ip is assumed to be predetermined [15]. In contrast, LP is a fast and simple technique, which only helps in optimizing the TDS and does not yield an optimal solution [15]. Nonlinear programming (NLP) like sequential quadratic programming (SQP) [12] has been used to find the optimal coordination of DOCRs. In this technique, all the relay settings are optimized simultaneously [9]. However, NLP gives better results, is very complex and maybe gets stuck in local minima due to its dependency on the initial values of Ip and TDS [9, 10].
Recently, solving the coordination problem of DOCRs using artificial intelligence (AI) has received considerable attention [7]. Many techniques based on population have been proposed to deal with this problem such as firefly technique (FFA) [8], group search optimization (GSO) [16], cuckoo search technique (CSA), harmony search (HS) [9] and gravitational search-based technique (GS) [17], backtracking search technique (BSA) and enhanced BSA [18, 19] and electromagnetic field optimization (EFO) and modified electromagnetic field optimization (MEFO) [20]. The comprehensive study between different population-based techniques such as genetic technique (GA), particle swarm optimization (PSO) and differential evaluation (DE) for solving DOCRs coordination problem has been presented in [21]. Hybrid techniques, which utilize the features of nature-inspired and classical techniques, have been successfully proposed to solve the coordination problem of DOCRs such as cuckoo search technique (CSA)-FFA [22], GA-NLP [23], BBO-differential evaluation (DE) [24] and biogeography-based optimization (BBO)-LP [10], gravitational search technique (GSA)-SQP [25], evaporation rate water cycle technique [26] and modified water cycle technique (MWCA) [27].
The GWO technique is a recent population-based technique developed by Seyedali et al. [28]. The GWO begins with an initial population of candidate solution called search agents. The design variables are represented as the search agent. Each search agent is assessed according to the main objective function, and then it is classified as follows: the best candidate solution is alpha, the second candidate solution is beta, the third candidate solution is gamma and the rest of candidate solutions are omega. This cycle is repeated until convergence criteria are met.
In this paper, the EGWO technique is proposed and applied to determine the optimal coordination and minimize the operating time of DOCRs. However, the topic discussed and contribution of the work could be summarized as:
An effective optimization technique called enhanced grey wolf optimizer technique (EGWO) is proposed and applied for solving the optimal coordination problem of DOCRs;
EGWO technique is proposed to improve the performance of conventional GWO;
In the proposed technique, the conventional GWO technique performance is improved by selecting a suitable balance between exploration and exploitation phases. This is achieved by exponentially decreasing the control parameter during the iterative process;
The performance of the proposed technique is assessed using different standard test systems (eight-bus, nine-bus, 15-bus and 30-bus);
Using the proposed technique, remarkable minimization in total operating time of all primary relays subject to the sequential operation between relay pairs is achieved;
The proposed technique is compared with other well-known optimization techniques;
The results obtained by the proposed technique are validated using benchmark DIgSILENT PowerFactory;
The obtained results prove the effectiveness and superiority of the proposed EGWO to solve the DOCRs coordination problem, compared with conventional GWO and other optimization techniques;
The proposed optimization technique can be used to effectively solve other optimization problems.
Remainder of this paper is organized as follows. Section 2 explains the problem formulation of DOCRs coordination. Section 3 illustrates the conventional GWO and proposed EGWO. Section 4 presents the main results of three different test systems obtained by the proposed EGWO, conventional GWO and other well-known optimization techniques. In addition, results validation using DIgSILENT PowerFactory is presented in the same section. Finally, the main conclusions and suggestions are provided in Sect. 5.
2 Problem statement
The main purpose of solving the coordination problem of DOCRs is to maintain the security and reliability of electric power system. This purpose can be achieved by finding the optimal relay settings which minimize the summation of operating times for all primary relays and at the same time keep the validation of the sequential operation between primary and backup relays [29]. The coordination problem of DOCRs can be stated as a constraint optimization problem, and the objective function (OF) of this problem can be written as follows:
where \( T_{i,n} \) is the operating time of primary relay, n is the number of relays; and Wi is the weight which represents fault probability in a line and is usually set to be equal to one [8].
The operating time of each protective relay can be expressed as follows:
where γ, β and α are constant values representing the characteristics of relay, If is the fault current (A), CT is the current transformer ratio for relay i, TDS is the time dial setting for relay i and Ip is the pickup current for relay i [20, 30]. In this paper, the inverse definite minimum time (IDMT) characteristic is used for fair comparison with the performance of other optimization techniques, where the constants γ, β and α are given as 1.0, 0.02 and 0.14, respectively, according to standard IEC 60225-3 [31]. The objective function in (1) should be achieved under two categories of constraints: relay characteristics constraints and coordination constraints.
2.1 Relay characteristics constraints
The limits of relay settings can be described as follows:
where \( I{\text{p}}_{\hbox{max} } \) and \( I{\text{p}}_{\hbox{min} } \) are the upper and lower pickup currents, respectively, and \( {\text{PS}}_{\hbox{max} } \) and \( {\text{PS}}_{\hbox{min} } \) are the upper and lower of PS, respectively. The range of \( I{\text{p}} \) and \( {\text{PS}} \) depends on the minimum fault current and the maximum load current to ensure that the relay is sensitive to the smallest fault current, and it will not mal-operate under normal load [23, 32]. \( {\text{TDS}}_{\hbox{max} } \) and \( {\text{TDS}}_{\hbox{min} } \) are the range settings of TDS, respectively, where the limits of TDS depend on the relay manufacturer [33].
2.2 Coordination constraint
Both primary and backup relays sense the fault simultaneously [23]. To ensure relays coordination, a certain time period is required between the operating times of relay pairs [9]. This means the backup relays must be initiated after time period known as the coordination time interval (CTI) in case the primary failed to operate [10]. The CTI depends on circuit breaker operating time, a relay error and safety margin and kind of relays [34]. The CTI can be described as follows:
where \( T_{\text{primary}} \) and \( T_{\text{backup}} \) are the operating times of primary and backup relays, respectively. The value of CTI varies from 0.20 to 0.50 s [35].
3 Proposed optimization technique
3.1 Conventional grey wolf optimizer
The GWO technique is inspired from the leadership hierarchy and hunting mechanism of grey wolves in nature [28, 36]. Alpha (α) and beta (β) are the first and second levels in the hierarchy, respectively. The third level in the group is called delta (δ). Omega (ω) is the lowest ranking in the hierarchy and represents the rest of candidate solutions [28].
3.1.1 GWO mathematical modelling
The mathematical models of social hierarchy, encircling and attacking prey can be explained as follows [28]:
Encircling prey: During the hunt, grey wolves encircle prey, which can be mathematically written as:
\( \overrightarrow {X} \) indicates the position vector of a grey wolf and \( \overrightarrow {{X_{P} }} \) is the position vector of the prey. \( \overrightarrow {D} \) is considered as a difference vector, \( k \) indicates the current iteration and \( \overrightarrow {A} \) and \( \overrightarrow {C} \) are coefficient vectors and are determined as follows:
where \( \overrightarrow {{r_{1} }} \) and \( \overrightarrow {{r_{2} }} \) are random numbers between [0, 1] and components of \( \overrightarrow {a} \) are linearly decreased from 2 to 0.
Hunting: Alpha, beta and delta have better knowledge about the position of prey. The other search agents and their positions are updated according to the position of three best search agents. The hunting mechanism can be mathematically described as:
Attacking prey: The grey wolves converge towards the prey to attack when \( \left| A \right| < 1. \)
Search for prey: The grey wolves diverge from each other to search for a fitter prey when \( \left| A \right| > 1. \)
3.2 Enhanced grey wolf optimizer
The exploration and exploitation are two conflicting phases, and both are important for a robust search cycle. They are fundamental concepts of any search technique. A proper balance between exploration and exploitation is the goal of all meta-heuristic techniques. This balance can guarantee to find the best global minima solution in the search space. The exploration has the ability to search into the solutions space, while exploitation aims to search locally around the promising solutions [37].
In conventional GWO technique, the exploration and exploitation are guaranteed by the adaptive values of parameter a [28]. The component of a is linearly decreased from 2 to 0 over the course of iterations [28].
In this paper, the control parameter is suggested to exponentially decrease instead of decreasing linear, which can be expressed as follows:
The parameter b is suggested to be used in the GWO technique instead of parameter a in order to achieve a suitable balance between the exploitation and exploration phases. This parameter is exponentially decreased during the iterative process in order to accelerate the convergence of GWO technique and reduce the total computation time.
As mentioned before, the parameter \( \overrightarrow {A} \) forces the technique to search for the candidate solutions when \( \left| A \right| > 1 \) and converge towards the prey when \( \left| A \right| < 1 \). In the proposed technique, the parameter \( \overrightarrow {A} \) can be calculated as follows:
Figure 1 shows the exponential change of parameter \( \overrightarrow {A} \) during the iterative process.

Variation in parameter \( \left| A \right| \) over the course of iterations in the proposed EGWO
The proposed EGWO technique is carried out in the following steps:
- Step 1:
Generate initial population of the position candidate solutions and initialize the iteration counter k = 1;
- Step 2:
Initialize the control parameters (A, C and b);
- Step 3:
Classify the candidate solution as follows: the best candidate solution is Xα, the second candidate is Xβ and the third candidate solution is Xδ;
- Step 4:
Initialize the control parameters A, C and b using (11), (19) and (20), respectively;
- Step 5:
Update the position of current candidate solutions using (18);
- Step 6:
Update A, C and b;
- Step 7:
Evaluate the objective function value for candidate solutions;
- Step 8:
Update the candidate solution as follows: the best candidate solution is Xα, the second candidate is Xβ and the third candidate solution is Xδ;
- Step 9:
Update the iteration counter k = k+1
- Step 10:
Repeat the process from Step 5 to Step 9 till the convergence criteria are met (k ≥ maximum number of iterations);
- Step 11:
Print the optimal solution (Xα)
However, the overall solution process of proposed EGWO for solving the coordination problem of DOCRs is summarized in Fig. 2.

Solution process of DOCRs coordination problem using the proposed EGWO
4 Results and discussions
The proposed technique has been tested using four test systems and compared with the conventional GWO and other well-known optimization techniques (GA [21], MEFO [20], HS [9], GA-NLP [23], GS[17], PSO [21], GSA-SQP [25], BBO-LP [10], DE [21], CSA [34], BSA [18], EBSA [19], GSO [16], FFA [38], MWCA[26], EWCA[27]). The stopping criterion for each test case has been chosen as 500 iterations. The proposed technique has been carried out in MATLAB environment using a 2.3 GHz PC with 4 GB RAM under Windows 7 operating systems.
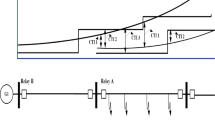
4.1 Case 1: eight-bus test case
The proposed EGWO is validated on the eight-bus system. This system consists of two generators, two transformers, seven lines and 14 relays, as shown in Fig. 3. The \( {\text{TDS}}_{\hbox{min} } \) and \( {\text{TDS}}_{\hbox{max} } \) limits are 0.05 and 1.1, respectively. The CTI is set to 0.3 s [19]. The details of this system such as the primary and backup relationship of relay pairs, fault currents and Ip ranges are given in [22].

Single-line diagram of eight-bus test system
The optimal values of \( {\text{Ip}} \) and TDS using EGWO and GWO are tabulated in Table 1. From this table, it can be noticed that the optimal solution obtained by EGWO is better than the solution obtained by GWO technique. The operating time of primary and backup relays and CTI value using EGWO are listed in Table 2 and represented graphically in Fig. 4. From Table 2 and Fig. 4, it can be observed that the primary relays operate first and after coordination time margin the backup relays operate in case primary relays failed to isolate the fault. From Tables 1 and 2, it can be observed that the proposed technique satisfies all the constraints of relay setting and coordination constraints associated with primary/backup relay pairs.

Operating times of primary–backup relay pair of eight-bus system
The convergence characteristics of EGWO and GWO techniques are shown in Fig. 5. From this figure, it can be observed that the EGWO technique is able to find the best optimal solution and gives better convergence compared with GWO technique. In addition, it can be noticed that the operating time of all primary relays obtained by EGWO is reduced to 16.64% which is less than that obtained by the conventional GWO. The required computational time of EGWO is 32.4 s after 400 iterations, while it is 42.07 s for GWO after 495 iterations.

Convergence characteristics of EGWO and GWO (eight-bus system)
The minimum operating time of DOCRs obtained by the EGWO and other well-known optimization techniques is given in Table 3. From this table, it can be observed that the proposed EGWO gives the least objective function which confirms its robustness for solving the coordination problem of DOCRs.
4.2 Case 2: nine-bus test system
In this case, the proposed technique is validated using the nine-bus test network [23]. Figure 6 shows the single-line diagram of this system. In this system, there are 12 lines (L1, L2, … , L12), 24 relays (R1, R2, … , R24) and 32 primary and backup relay pairs.

Single-line diagram of nine-bus test system
To coordinate the settings of all the 24 relays, there are 48 decision variables, i.e. TDS1 to TDS24 and Ip1 to Ip24. All buses of the network and DOCRs in Fig. 6 are numbered according to [23]. The initial ranges for \( {\text{TDS}}_{\hbox{min} } \) and \( {\text{TDS}}_{\hbox{max} } \) are 0.025 and 1.2, respectively. The \( I{\text{p}}_{\hbox{min} } \) and \( I{\text{p}}_{\hbox{max} } \) limits are given in [20]. The CT ratio for each relay is 500:1, and the CTI is set to 0.2 s as in [20]. Further details of this system such as primary and the backup relationship between relay pairs and fault currents are given in [23].
The optimal values of relay settings using EGWO and GWO are tabulated in Table 4. From this table, it can be noticed that the optimal solution obtained by EGWO is better than that obtained by GWO technique. The operating time of primary and backup relays and CTI value using EGWO are listed in Table 5 and represented graphically in Fig. 7. From Table 5 and Fig. 7, it can be observed that the primary relays operate first and after coordination time margin the backup relays operate in case primary relays failed to isolate the fault.

Operating time of primary–backup relay pairs for nine-bus system
From Tables 4 and 5, it can be observed that the proposed technique satisfies all the constraints of relay setting and coordination constraint associated with primary/backup relay pairs.
The convergence characteristics of EGWO and GWO techniques are shown in Fig. 8. From this figure, it can be observed that the EGWO technique succeeded in finding the global optimal solution and giving better convergence compared with GWO technique. In addition, it can be noticed that the operating time of all primary relays obtained by the EGWO is reduced to 32.088% less than that obtained by the conventional GWO. The required computational time for EGWO is 35 s after 250 iterations, while it is 68.8 s for GWO after 485 iterations.

Convergence characteristics of EGWO and GWO (nine-bus test system)
The minimum operating time of DOCRs obtained by the proposed technique and other well-known optimization techniques is given in Table 6. From this table, it can be observed that the proposed technique gives the least objective function which confirms its robustness for solving the coordination problem of DOCRs.
4.3 Case 3: 15-bus test system
The third test system considered in this section is 15-bus system [29]. The single-line diagram of this system is shown in Fig. 9. In this system, there are 21 lines (L1, L2, … , L21), 42 relays (R1, R2, … , R42) and 82 primary and backup relay pairs.

Single-line diagram of 15-bus test system
To coordinate the settings of all the 42 relays, there are 84 decision variables, i.e. TDS1 to TDS42 and Ip1 to Ip42. All buses of the network and DOCRs in Fig. 4 are numbered according to [20]. The \( {\text{TDS}}_{\hbox{min} } \) and \( {\text{TDS}}_{\hbox{max} } \) limits are 0.1 and 1.1, respectively. The CTI is set to 0.2 s as in [9, 20]. Further details of this system such as primary and the backup relationship between relay pairs and fault currents are given in [29].
The optimal values of relay settings obtained by EGWO and GWO are tabulated in Table 7. From this table, it can be noticed that the optimal solution obtained by EGWO is better than that obtained by GWO technique. The operating time of primary and backup relays and CTI value using EGWO are listed in Table 8 and represented graphically in Fig. 10. From Table 8 and Fig. 10, it can be observed that the primary relays operate first and after coordination time margin the backup relays operate in case primary relays failed to isolate the fault. From Tables 7 and 8, it can be observed that the proposed technique satisfies all the constraints of relay setting and coordination constraints associated with primary/backup relay pairs.

Operating time of primary–backup relay pairs for 15-bus system
The convergence characteristics of EGWO and GWO techniques are shown in Fig. 11. From this figure, it can be noticed that the EGWO technique succeeded in finding the global optimum solution and giving better convergence compared with GWO technique. In addition, it can be noticed that the operating time of all primary relays obtained by EGWO is reduced to 20.47% less than that obtained by the conventional GWO. The required computational time of EGWO is 260 s after 250 iterations, while it is 530 s for GWO after 485 iterations.

Convergence characteristics of EGWO and GWO (15-bus system)
The minimum operating time of DOCRs obtained by the proposed technique and other well-known optimization techniques is given in Table 9. From this table, it can be observed that the proposed technique gives the least objective function which confirms its robustness in solving the coordination problem of DOCRs.
4.4 Case 4: IEEE 30-bus test system
The last test system considered in this section is the IEEE 30-bus system [33]. The single-line diagram of IEEE 30-bus network is shown in Fig. 12. In this system, there are 20 lines (L1, L2, … , L20), 38 relays (R1, R2, … , R38) and 62 primary and backup relay pairs.

Single-line diagram of IEEE 30-bus test system
To coordinate the settings of all the 38 relays, there are 76 decision variables, i.e. TDS1 to TDS38 and Ip1 to Ip38. All buses of the network and DOCRs in Fig. 10 are numbered according to [33]. The initial ranges for \( {\text{TDS}}_{ \hbox{min} } \) and \( {\text{TDS}}_{ \hbox{max} } \) are 0.1 and 1.1, respectively. The PSmin and PSmax limits are 1.5 and 6, respectively, the CT ratio for each relay is 1000:5, and the CTI is set to 0.3 s. Further details of this system such as primary and the backup relationship between relay pairs and fault currents are given in [25].
The optimal values of relay settings obtained by EGWO and GWO are tabulated in Table 10. From this table, it can be noticed that the optimum solution obtained by EGWO is better than that obtained by GWO technique. The operating time of primary and backup relays and CTI value using EGWO are listed in Table 11 and represented graphically in Fig. 13.

Operating time of primary–backup relay pairs for IEEE 30-bus system
From Table 11 and Fig. 13, it can be observed that the primary relays operate first and after coordination time margin the backup relays operate in case primary relays failed to isolate the fault. From Table 10 and Table 11, it can be observed that the proposed technique satisfies all the constraints of relay setting and coordination constraints associated with primary/backup relay pairs.
The convergence characteristics of EGWO and GWO techniques are shown in Fig. 14. From this figure, it can be observed that the EGWO technique succeeded in finding the global optimal solution and giving better convergence compared with GWO technique. In addition, it can be noticed that the operating time of all primary relays obtained by EGWO is reduced to 8.4% less than that obtained by the conventional GWO. The required computational time of EGWO is 180 s after 250 iterations, while it is 370 s for GWO after 480 iterations.

Convergence characteristics of EGWO and GWO (IEEE 30-bus system)
The minimum operating time of DOCRs obtained by the proposed technique and other well-known optimization techniques is given in Table 12. From this table, it can be observed that the proposed technique gives the least objective function which confirms its robustness in solving the coordination problem of DOCRs.
4.5 Verification of EGWO using DIgSILENT PowerFactory
DIgSILENT PowerFactory is used to validate the optimal relay settings [39]. Three-phase faults are applied in the different locations along transmission (L20) in 15-bus test system. Three-phase fault occurs near relay no. 39. The operating time of primary and backup relays is shown in Fig. 15. From this figure, it can be observed that the primary relay (relay no. 39) firstly operates and the backup relay (relay no. 37) operates after sufficient time margin (0.2 s), which indicate the correct sequential operation between primary and backup relays.

Operating time of relays 39 and 37 (15-bus system)
Three-phase fault occurs near relay no. 40. The operating time of primary and backup relays is shown in Fig. 16. From this figure, it can be observed that the primary relay (relay no. 40) firstly operates and the backup relay (relay no. 41) operates after sufficient time margin (0.2 s), which indicates the correct sequential operation between primary and backup relays.

Operating time of relays 40 and 41(15-bus system)
Three-phase fault currents are applied in the middle of transmission line (line no. 20) in 15-bus test system. From Figs. 17 and 18, it can be observed that the operating times of primary relays (relay no. 39 and relay no. 40) are 0.42 s and 0.46 s, respectively, and those of backup relays (relay no. 41 and no. 37) are 0.7 s and 93 s, respectively. In addition, it can be observed that there is sufficient time margin (> 0.2 s) between relay pairs.

Operating time of relays 39 and 37 (15-bus system)

Operating time of relays 40 and 41(15-bus system)
5 Conclusion
In this paper, an efficient optimization technique (EGWO) has been proposed and applied to solve the optimal coordination problem of DOCRs. Using the EGWO, the search space and the computation time of the conventional GWO have been reduced by adjusting the parameter which controls the explorative and exploitative phases. The performance of EGWO has been validated and compared with well-established competitive optimization techniques based on four different systems (eight-bus, nine-bus, 15-bus and IEEE 30-bus). The reported results show that the proposed EGWO is able to find the optimal relay setting, maintain the selectivity between relay pairs and converge to the global minimum faster than the conventional GWO. The EGWO technique succeeded in reducing the total operating time of DOCRs (about 19.3995%) to be less than the conventional GWO technique for all test systems. In addition, it noticed that the obtained results using EGWO are better than those obtained by the other optimization techniques. Finally, the results using the EGWO technique have been verified using DIgSILENT PowerFactory. In future, the changes in network topology and the effect of distributed generation on the coordination of DOCRs can be considered. In addition, the proposed optimization technique can be extended to other applications including optimal power flow and optimal allocation of compensation devices to achieve multi-objective functions.
References
Bottura FB, Bernardes WM, Oleskovicz M, Asada EN (2017) Setting directional overcurrent protection parameters using hybrid GA optimizer. Electr Power Syst Res 143:400–408
Costa MH, Saldanha RR, Ravetti MG, Carrano EG (2017) Robust coordination of directional overcurrent relays using a matheuristic algorithm. IET Gener Transm Distrib 11:464–474
Ezzeddine M, Kaczmarek R, Iftikhar M (2011) Coordination of directional overcurrent relays using a novel method to select their settings. IET Gener Transm Distrib 5:743–750
Phadke AG, Thorp JS (2009) Computer relaying for power systems. Wiley, New York
Al-Roomi AR, El-Hawary ME (2017) Optimal coordination of directional overcurrent relays using hybrid BBO-LP technique with the best extracted time-current characteristic curve. In: IEEE 30th Canadian conference electrical and computer engineering, pp 1–6
Shih MY, Enríquez AC, Hsiao T-Y, Treviño LMT (2017) Enhanced differential evolution technique for coordination of directional overcurrent relays. Electr Power Syst Res 143:365–375
Singh M, Panigrahi B, Abhyankar A (2013) Optimal coordination of directional over-current relays using teaching learning-based optimization (TLBO) technique. Int J Electr Power Energy Syst 50:33–41
Tjahjono A, Anggriawan DO, Faizin AK, Priyadi A, Pujiantara M, Taufik T et al (2017) Adaptive modified firefly technique for optimal coordination of overcurrent relays. IET 11:2575–2585
Rajput VN, Pandya KS (2017) Coordination of directional overcurrent relays in the interconnected power systems using effective tuning of harmony search technique. Sustain Comput Inf Syst 15:1–15
Albasri FA, Alroomi AR, Talaq JH (2015) Optimal coordination of directional overcurrent relays using biogeography-based optimization techniques. IEEE Trans Power Deliv 30:1810–1820
Urdaneta AJ et al (1996) Coordination of directional overcurrent relay timing using linear programming. IEEE Trans Power Deliv 11(1):122–129
Birla D, Maheshwari RP, Gupta H (2006) A new nonlinear directional overcurrent relay coordination technique, and banes and boons of near-end faults-based approach. IEEE Trans Power Deliv 21:1176–1182
Bedekar PP, Bhide SR, Kale VS (2009) Optimum time coordination of overcurrent relays in distribution system using Big-M (penalty) method. WSEAS Trans Power Syst 4:341–350
Urdaneta AJ, Nadira R, Jimenez LP (1988) Optimal coordination of directional overcurrent relays in interconnected power systems. IEEE Trans Power Deliv 3:903–911
Abdelaziz AY, Talaat H, Nosseir A, Hajjar AA (2002) An adaptive protection scheme for optimal coordination of overcurrent relays. Electr Power Syst Res 61:1–9
Alipour M, Teimourzadeh S, Seyedi H (2015) Improved group search optimization technique for coordination of directional overcurrent relays. Swarm Evolut Comput 23:40–49
Chawla A, Bhalja BR, Panigrahi BK, Singh M (2018) Gravitational search based technique for optimal coordination of directional overcurrent relays using user defined characteristic. Electr Power Compon Syst 46:43–55
El-Hana Bouchekara HR, Zellagui M, Abido MA (2016) Coordination of directional overcurrent relays using the backtracking search technique. J Electr Syst 12(2):387–405
Othman AM, Abdelaziz AY (2016) Enhanced backtracking search technique for optimal coordination of directional over-current relays including distributed generation. Electr Power Compon Syst 44:278–290
Bouchekara H, Zellagui M, Abido MA (2017) Optimal coordination of directional overcurrent relays using a modified electromagnetic field optimization technique. Appl Soft Comput 54:267–283
Alam MN, Das B, Pant V (2015) A comparative study of metaheuristic optimization approaches for directional overcurrent relays coordination. Electr Power Syst Res 128:39–52
Rajput V, Pandya K, Joshi K (2015) Optimal coordination of directional overcurrent relays using hybrid CSA-FFA method. In: 12th International conference electrical engineering/electronics, computer, telecommunications and information technology, pp 1–6
Bedekar PP, Bhide SR (2011) Optimum coordination of directional overcurrent relays using the hybrid GA-NLP approach. IEEE Trans Power Deliv 26:109–119
Al-Roomi AR, El-Hawary ME (2016) Optimal coordination of directional overcurrent relays using hybrid BBO/DE technique and considering double primary relays strategy. In: Electrical power and energy conference (EPEC), IEEE, pp 1–7
Radosavljević J, Jevtić M (2016) Hybrid GSA-SQP technique for optimal coordination of directional overcurrent relays. IET Gener Transm Distrib 10:1928–1937
Korashy A, Kamel S, Youssef A-R, Jurado F (2019) Modified water cycle technique for optimal direction overcurrent relays coordination. Appl Soft Comput 74:10–25
Korashy A, Kamel S, Youssef A-R, Jurado F (2018) Evaporation rate water cycle technique for optimal coordination of direction overcurrent relays. In: 2018 Twentieth International Middle East Power Systems Conference (MEPCON), pp 643–648
Mirjalili S, Mirjalili SM, Lewis A (2014) Grey wolf optimizer. Adv Eng Softw 69:46–61
Amraee T (2012) Coordination of directional overcurrent relays using seeker technique. IEEE Trans Power Deliv 27:1415–1422
El-Fergany AA, Hasanien HM (2017) Optimized settings of directional overcurrent relays in meshed power networks using stochastic fractal search technique. In: International transactions on electrical energy systems, vol 27
IEC. Std (1989) Electrical relays-part 3: single input energizing quantity measuring relays with dependent or independent time 60255-3
Singh M, Panigrahi BK, Abhyankar AR, Das S (2014) Optimal coordination of directional over-current relays using informative differential evolution technique. J Comput Sci 5:269–276
Mohammadi R, Abyaneh HA, Rudsari HM (2011) S. H. Fathi, and H. Rastegar, “Overcurrent relays coordination considering the priority of constraints. IEEE Trans Power Deliv 26:1927–1938
Darji G, Patel M, Rajput V, Pandya K (2015) A tuned cuckoo search technique for optimal coordination of directional overcurrent relays. In: 2015 International conference power and advanced control engineering (ICPACE), pp 162–167
Damchi Y, Dolatabadi M, Mashhadi HR, Sadeh J (2018) MILP approach for optimal coordination of directional overcurrent relays in interconnected power systems. Electr Power Syst Res 158:267–274
Kishor A, Singh PK (2016) Empirical study of grey wolf optimizer. In: Proceedings of fifth international conference on soft computing for problem solving, pp 1037–1049
Črepinšek M, Liu S-H, Mernik M (2013) Exploration and exploitation in evolutionary techniques: a survey. ACM Comput Surv (CSUR) 45:35
Gokhale SS, Kale VS (2018) On the significance of the plug setting in optimal time coordination of directional overcurrent relays. In: International transactions on electrical energy systems, pp 1–15
Schmieg M (1985) DIgsilent power factory V14. [online]. http://www.digsilent.de. Accessed May 2019
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kamel, S., Korashy, A., Youssef, AR. et al. Development and application of an efficient optimizer for optimal coordination of directional overcurrent relays. Neural Comput & Applic 32, 8561–8583 (2020). https://doi.org/10.1007/s00521-019-04361-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-019-04361-z