
Abstract
We propose a stochastic disease model where vaccination is included and such that the immunity is permanent. The existence, uniqueness, and positivity of the solution and the stability of the disease-free equilibrium are studied.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The mathematical models, deterministic and stochastic, are wide used in order to describe the spread of a disease into a population.
Most models descend from the classical SIR model of Kermack e Meckendrick [10]. In the SIR model, the population is subdivided into three distinct classes: susceptible, infective, and removed denoted by S, I, and R respectively.
The fundamental parameter that governs the spread of the disease into a population is “the basic reproduction number” denoted by \({\mathfrak{R}}_0\). It is defined as “the average number of secondary case caused by an infectious individual in a totally susceptible population.” When \({\mathfrak{R}}_0\leq 1\) the disease dies out while, when \({\mathfrak{R}}_0>1\) the disease is endemic.
After the model of Kermack e Meckendrick, many its extensions and other models have been proposed and studied (see [3, 13]).
The introduction of a stochastic perturbation in these models is justified by observation that the real life is full of social and environmental random variations. The presence of a stochastic noise in a model modifies the behavior of solution of correspondent deterministic system and modifies the thresholds of the system for an epidemic to occur. In [14], the authors studied how the noise induce effects in a populations dynamics. In [5], the authors studied a dynamical model for epidemiological infection with a noise source with memory. In [6], the authors analyzed a model for epidemic dynamics by using a pulse noise model with memory. In [16], a stochastic SIR model has been studied and has been showed as the thresholds vary.
There is an increasing interest in the analysis and control of infectious disease. Attention has been give to vaccination and treatment policies. The study of vaccination related to disease transmission has been the subject of intense theoretical analysis (see [1, 2, 11, 15, 17]). In modeling the disease transmission in which a vaccination program is in effect, the main problem is that the vaccination is not complectly efficient. Vaccines may have low efficacy and be leaky (i.e., after a certain time, vaccinated individual may have only partial protection from infection); moreover, data support the fact that a vaccine usually wanes, thus providing only temporary protection. We consider a SIR-type disease when a vaccination program is in effect
precisely the population can be in one of four states: susceptible, infective, vaccinated, and removed denoted by S, I, V, and R respectively. In the model, we suppose that in the unit time, a fraction ϕ of the susceptible class is vaccinated. The vaccination may reduce but not completely eliminate susceptibility to infection, so in the model is included a factor ρ, 0 ≤ ρ ≤ 1, in the contact rate of vaccinated members with ρ = 0 meaning that the vaccine is perfectly effective and ρ = 1 meaning that the vaccine has no effect. We suppose also that the vaccination loses effect at a proportional rate θ and that the immunity is permanent so that a fraction λ of infective goes in the removed class. We assume that the birth occurs in the system with the same constant rate μ of death and that all newborns enter in susceptible class. Consequently, the total population is constant and the variables are normalized to N = 1, that is, S(t) + I(t) + V(t) + R(t) = 1 for all t ≥ 0. Of course \({\mu, \lambda, \phi, \theta, {\beta}\in \mathbb{R}_+}\).
In this paper, we examine the case when the vaccine does not lose its effectiveness (i.e., θ = 0). One can modify the basic model, based on this assumption in order to get the system
Denoted by \({\mathfrak{R}}_0=\frac{\beta}{\mu+\lambda}\) the basic reproduction number and by
the basic reproduction number in a population in which a proportion ϕ has been vaccinated. It is known that in the absence of the disease (I = 0) there is a unique disease-free equilibrium
that is globally asymptotically stable if \({\mathfrak{R}}_{\phi}<1\).
If \({\mathfrak{R}}_{\phi}>1\) for some parameters values, the model exhibits a backward bifurcation leading to the existence of multiple endemic equilibria and news subthreshold, which may be important when it comes to designing vaccination strategies (see [2, 4]).
The real world is not deterministic so it is important to examine the inclusion of stochastic effects into deterministic models. We introduce a stochastic perturbation in the system (2) and obtain the following system
where σ is a positive constant and W is a real Wiener process defined on a stochastic basis \((\Upomega, \mathcal{F}, (\mathcal{F}_t)_{t\geq 0}, \bf P)\).
In this paper, we want to prove the existence of the solution of (3) with suitable initial conditions and study the stability of the disease-free equilibrium.
2 Nonnegative solutions
In this section, we prove the existence of the solution of system (3).
We introduce the notation
To begin the analysis of the model, define the subset
to ensure that the model is well posed and thus biologically meaningful, we need to prove that the solution remains in \(\Upomega\).
We study (3) with the following initial conditions
Since the coefficients of the system (3) are locally Lipschitz, there is the following result of local existence of solutions.
Theorem 2.1
(Theorem 1.1, [5]) If (4) holds, then there exists τ > 0 and a unique solution (S(t), I(t), V(t), R(t)) to the system (3) on \(t\in [0,\tau[\) almost surely.
There is the following remark.
Remark 2.1
Let (S(t), I(t), V(t), R(t)) be the solution of the system (3) in [0,τ[; if S(s) > 0, I(s) > 0, V(s) > 0, R(s) > 0 for all 0 ≤ s ≤ τ a.s., then
for all 0 ≤ s ≤ τ a.s..
Proof
It is sufficient to observe that the total population is constant, that is, S(t) + I(t) + V(t) + R(t) = 1 for all 0 < t < τ almost surely, in fact summing the equations of the system (3), we obtain
Now, we consider a integer k 0 > 4 sufficiently large such that \((S(0), I(0), V(0), R(0))\in [\frac{1}{k_0},k_0]^4\). For each integer k > k 0, we define the stopping time
We shall show that the solution of (3) with initial condition (4) is nonnegative and global by using the idea exposed in [7].
Theorem 2.2
There exists a unique solution (S(t), I(t), V(t), R(t)) to the system (3) with initial condition (4) on t ≥ 0 and the solution will remain in \({\mathbb{R}^4_+}\) with probability 1, namely \({(S(t), I(t), V(t), R(t))\in \mathbb{R}^4_+}\) for all t ≥ 0 almost surely.
For the proof of the theorem, we need the following lemma.
Lemma 2.1
Let (S(t), I(t), V(t), R(t)) be the solution of the system (3) with initial condition (4), then
where τ k is the stopping time given by (5) and C(t) is the solution of the Cauchy problem
where B and \(B^{\prime}\) are constants defined by
Proof
We consider a C 2-function, \({\Upphi:\mathbb{R}^4_+\to \mathbb{R}_+}\) by
In virtue of stopping time defined in (5), \((S(\tau_k\wedge t), I(\tau_k\wedge t), V(\tau_k\wedge t), R(\tau_k\wedge t))\in[\frac{1}{k},k]^4\) and by using Ito formula, we have
where
In virtue of Remark 2.1, we can neglect the terms
and we estimate the terms of right-hand side of (9) by the following inequalities
and
substituting these relations into (9) and taking expectation, we obtain
where B and \(B^{\prime}\) are constants given by (7).
We set
then, we obtain
from which it follows that
where C(t) is the solution of Cauchy problem
and the lemma is proved. □
Proof of the Theorem 2.2
From the Theorem 2.1, there exists τ > 0 and the solution (S(t), I(t), V(t), R(t)) to the system (3) on \(t\in[0,\tau[; \) to show that this solution is global, we need to show that \(\tau=\infty\) a.s. Consider the stopping time defined in (5). Clearly, (τ k ) is an increasing sequence. Set \(\tau_\infty=\lim_{k\to\infty}\tau_k\), whence \(\tau_\infty<\tau, \) a.s. If we can show that \(\tau_\infty=\infty\) a.s. then \(\tau=\infty\) a.s. and consequently the solution \({(S(t), I(t), V(t),R(t))\in \mathbb{R}^4_+}\) for all t ≥ 0 a.s. For if this statement is false, then there are two constants T > 0 and \(\epsilon\in (0,1)\) such that
Consequently, there exists an integer k 1 ≥ k 0 such that
Set \(\Upomega_k=\{\omega\in \Upomega: \tau_k(\omega)\leq T\}\) for each k ≥ k 1, we have \(P(\Upomega_k)\geq \epsilon\). Note that for every \(\omega\in \Upomega_k\) there is some component of (S(τ k ), I(τ k ), V(τ k ), R(τ k )) equals a k or \(\frac{1}{k}\) and hence by (8)
From (6), we deduce that
where \(1_{\Upomega _k}\) is the indicator function of \(\Upomega _k\). Letting \(k\to \infty\) leads to the contradiction, so we must have \(\tau_\infty=\infty\) a.s. □
We observe that Theorem 2.2 and Remark 2.1 show that \(\Upomega\) is the invariant set of the solutions of the system (3).
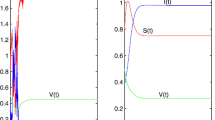
It is well known that the presence of a noise source can modify the behavior of deterministic evolution of the system. For this reason, we use numerical simulations based on the Euler-Maruyama scheme and Matlab software and refer to [9] for comparing the behavior of stochastic solution of (3) with that one of deterministic solution of (2). If we choose the parameters values such that \({\mathfrak{R}}_{\phi}<1\) (see Figs. 1, 2) with different values of σ, the numerical simulations show that the stochastic solution (see the continuous line) as that deterministic one (see the straight line) goes to the disease-free equilibrium. If we choose the parameters values such that \({\mathfrak{R}}_{\phi}>1\) we can observe different situations. The random fluctuations can eradicate the infectious disease (see Fig. 3) or the stochastic solution can fluctuate around the deterministic endemic equilibrium (see Fig. 4).

Number of susceptible, infective and vaccinates in a deterministic and stochastic SIVR model. S(0) = 0.8, I(0) = 0.1, V(0) = 0.05, λ = 0.05, μ = 0.005, ϕ = 0.2, ρ = 0.1, β = 0.4, σ = 1.62 and \({\mathfrak{R}}_{\phi}=0.8869<1\)

Number of susceptible, infective and vaccinates in a deterministic and stochastic SIVR model. S(0) = 0.8, I(0) = 0.1, V(0) = 0.05, λ = 0.05, μ = 0.005, ϕ = 0.2, ρ = 0.1, β = 0.4, σ = 1.02 and \({\mathfrak{R}}_{\phi}=0.8869<1\)

Number of susceptible, infective and vaccinates in a deterministic and stochastic SIVR model. S(0) = 0.8, I(0) = 0.1, V(0) = 0.05, λ = 0.1, μ = 0.2, ϕ = 0.2, ρ = 0.1, β = 0.8, σ = 1.22 and \({\mathfrak{R}}_{\phi}=1.4667>1\)

Computer simulations of mathematical model where S(0) = 0.8, I(0) = 0.1, V(0) = 0.05, λ = 0.1, μ = 0.2, ϕ = 0.2, ρ = 0.1, β = 0.8, σ = 0.2 and \({\mathfrak{R}}_{\phi}=1.4667>1\)
3 Stability of disease-free equilibrium
In this section, we prove the stability of the disease-free equilibrium in order to provide the threshold condition for disease control or eradication. Here recall the definition of stability of equilibrium states of a stochastic differential equation as introduced in [12]. Consider the following n-dimensional stochastic equations system
where f(t, x) is a function in \({\mathbb{R}^n}\) defined in \({ [t_0, +\infty[\times \mathbb{R}^n, }\) and g(t, x) is a n × m matrix, f, g are locally Lipschitz functions in x and W(t) is an m-dimensional Wiener process. If \({x_0\in \mathbb{R}^n}\), denote by x(t;t 0,x 0) the solution of (10) with initial condition x(t 0) = x 0.
Definition 3.1
The stochastic process x(t;t 0,x 0) = x 0 is a stationary solution of the stochastic system (10) if
If x 0 = 0, the stationary solution is called a trivial solution.
Definition 3.2
The trivial solution of system (10) is said to be p-th moment exponentially stable if there are two positive constants C and \(\tilde{C}\) such that
for all \({x_0\in \mathbb{R}^n}\). When p = 2, it is usually said to be exponentially stable in mean square.
Now, we want to prove our main result
Theorem 3.1
If the conditions \({\mathfrak{R}}_0+\frac{\sigma^2(1+\rho)}{2}<\frac{1}{1+\rho}\) holds, then the disease-free equilibrium is exponentially stable in mean square for system (3).
Proof
Consider the second equation of (3), the Ito formula gives us
by using Theorem 2.2, we have
Set
then, from (11), we have
by using the comparison theorem of stochastic equation, we obtain
The Ito formula apply to the last equation of (3) gives us
by using the Holder inequalities, we can observe that
substituting this relation into (13) and taking the expectation, we obtain
by using (12), we have
then we obtain
the last integral is
so, we have
where
Consider the first equation of (3) near the disease-free equilibrium
the Ito formula gives us
neglected the term \(-2\beta(S-\frac{\mu}{\mu+\phi})^2I\), we have
We can estimate the following term
hence
taking into account (14), we obtain
hence
where
Consider the third equation of (3) near the disease-free equilibrium
the Ito formula gives us
neglected the term \(-2\rho\beta(V-\frac{\phi}{\mu+\phi})^2I\) and estimated the following terms
and
we have
taking into account (12) and (14), we obtain
hence
where
Hence, denoting by \(x(t)=(S(t)-\frac{\mu}{\mu+\phi},I(t), V(t)-\frac{\phi}{\mu+\phi}, R(t))\), by using (12), (14), (15), and (16), we obtain
for some constants \(C, \tilde{C}\), hence the disease-free equilibrium is exponentially stable in mean square. □
References
Arino J, McCluskey CC, Van Den Driessche P (2003) Global results for an epidemic model with vaccination that exhibits backward bifurcation. SIAM J Appl Math 64:260–276
Arino J, Cooke KL, Van Den Driessche P, Velasco Hernándenz J (2004) An epidemiology model that includes a leaky vaccine with a general waning function. Discrete Contin Dyn Syst B 4(2):479–495
Boni MF, Gog JR, Andreasen V, Felman MW (2006) Epidemic dynamics and antigenic evolution in a single season of influentia. Proc Biol Sci 273:1307–1316
Brauer F (2004) Backward bifurcations in a simple vaccination models. J Math Anal Appl 298:418–431
Chichigina O, Valenti D, Spagnolo B (2005) A simple noise model with memory for biological system. Fluctuation Noise Lett 5 2:243–250
Chichigina O, Dubkov AA, Valenti D, Spagnolo B (2011) Stability in a system subject to noise wih regulated periodicity. Phis Rev E 84:021134
Dalal N, Greenhalgh D, Mao X (2007) A stochastic model of AIDS and condom use. J Math Anal Appl 325:36–53
Friedman A (1975) Stochastic differential equations and applications. Academic Press, Massachusetts
Higham DJ (2001) An algorithmic introduction to numerica simulation of stochastic differential equation. SIAM Rev Educ Sect
Kermack W, McKendrick A (1927) A contribution to the mathematical theory of epidemics. Proc R Soc Lond A 115:700–721
Kribs-Zaleta CM, Velasco-Hernández JX (2000) A simple vaccination model with multiple endemic states. Math Biosci 164:183–201
Mao X (1997) Stochastic differential equations and applications. Ellis Horwood, Chichester
Perfeito L, Fernandes L, Mota C, Felman MW (2006) Epidemic dynamics and antigenic evolution in a single season of influentia. Sci Agric 273:1307–1316
Spagnolo B, Valenti D, Fiasconaro A (2004) Noise in ecosystem: a short review. Math Biosci Eng 1:185–211
Sun C, Yang W (2010) Global results for an SIRS model with vaccination and isolation. Nonlinear Anal: Real World Appl 11:4223–4237
Tornatore E, Buccellato SM, Vetro P (2005) Stability of a stochastic SIR system. Phys A 354:111–126
Tornatore E, Buccellato SM, Vetro P (2006) On a stochastic disease model with vaccination. Rend Circ Matem Palermo Serie II, Tomo LV, pp 223–240
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Tornatore, E., Vetro, P. & Buccellato, S.M. SIVR epidemic model with stochastic perturbation. Neural Comput & Applic 24, 309–315 (2014). https://doi.org/10.1007/s00521-012-1225-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-012-1225-6