
Abstract
Key message
The purposed spatially explicit and spatially non-explicit height to diameter ratio models can be useful to evaluate the stability of trees and stands for Norway spruce and European beech forests.
Abstract
Height to diameter ratio (HDR) is an individual tree index, also known as slenderness coefficient, and commonly used to evaluate stability of trees and stands. We developed both spatially explicit and spatially non-explicit HDR models for Norway spruce (Picea abies (L.) Karst.) and European beech (Fagus sylvatica L.) using a large dataset collected from fully stem-mapped permanent research plots in various parts of the Czech Republic. Various tree and stand characteristics were evaluated for their potential contributions to the the HDR models. In addition to diameter at breast height (DBH), other highly significant predictor variables identified are dominant height (HDOM) (site quality measure), dominant diameter (DDOM) and quadratic mean diameter (QMD) (spatially non-explicit competition measures), and Hegyi’s index (spatially explicit competition index, CI). A simple exponential decay function was chosen as a base function to include these predictor variables. Both spatially explicit and spatially non-explicit models described large parts of the HDR variations [R 2adj = 0.66 (Norway spruce), 0.72 (European beech)] without any systematic deviation of the residuals across the observed data range. Unlike for European beech, spatially explicit model for Norway spruce better described HDR variations than its spatially non-explicit counterpart. After DBH, HDOM provided the largest contribution to each model type, followed by DDOM and QMD or CI for both species. The HDR increased with increasing HDOM and CI, but it decreased with increasing DDOM and QMD, suggesting there were significantly large effects of site quality and stand density on HDR. Because of a little difference between the fit statistics and graphical displays of the two model types, spatially non-explicit model is recommended for prediction of HDR for both species as this model does not require spatially explicit CI, which is computationally much more complex than spatially non-explicit competition measures. The proposed HDR models may be applicable to assess stability of trees and stands, and to regulate stand densities.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The height to diameter ratio (HDR) is an individual tree index, known as slenderness coefficient and calculated with total height divided either by diameter at the breast height or diameter at the root collar of the tree (Opio et al. 2000). The HDR is a measure of stability of a tree or stand. In general, smaller value of HDR indicates lower position of center of gravity of tree with longer crown length, but have higher stability than the tree with larger HDR value. The HDR can be used as a reliable measure to evaluate tree’s stability against snow, icing, and wind (Nykänen et al. 1997; Jiao-jun et al. 2003). Many studies (Cremer et al. 1982; Valinger and Fridman 1997; Castedo-Dorado et al. 2009; Wallentin and Nilsson 2014) used HDR to characterize stability at tree or stand level. A high HDR has been associated with enhanced risk of uprooting by wind and breaking by snow and wind (Schütz et al. 2006; Urata et al. 2011; Valinger and Fridman 2011). The HDR is also used to assess mechanical properties of wood such as trees with smaller HDR usually have a higher maximum bending moment than trees with larger HDR, of similar heights (Moore 2000; Peltola et al. 2000; Peltola 2006). A large HDR indicates that a tree has grown in a dense stand under the influence of mutual support of its neighboring trees. Therefore, trees with a large HDR can be vulnerable because their stems have not been acclimatized to the conditions of high mechanical perturbation (Valinger and Fridman 1997; Bošeľa et al. 2014). In general, mechanical models assume tree as a unilaterally fixed beam to stand as such a system unilaterally cantilevered beam and evaluate the resilience of the system against wind, ice, and snow loads by physical methods (Peltola et al. 1999; Gardiner et al. 2000; Hlásný et al. 2011). Several studies (Valinger and Fridman 1997; O’Hara and Oliver 1999; Päätalo et al. 1999; Wonn and O’Hara 2001; Konôpka and Konôpka 2003; Mickovski et al. 2005; Kamimura and Shiraishi 2007; Schelhaas et al. 2007; Kamimura et al. 2008; Schindler et al. 2012; Mitchell 2013) have shown strong correlation between HDR and vulnerability of the trees and stands to snow and wind damages. The HDR can therefore be used to identify more vulnerable trees to snow, ice, and wind (Smith 1986; Mustard and Harper 1998). In addition to stability assessment, HDR can be also used as a competition measure to growth models (MacDonald et al. 1990; Morris and MacDonald 1991; Opio et al. 2000).
Changing tree and stand characteristics over the course of growth projection necessitates models to update estimates of the tree dimensions including HDR. Updating can be possible through either doing direct measurement for all trees on each sample plot or making indirect prediction with previously established models. Generally, separate HDR models are not applied to update HDR, but instead, individual tree height and diameter growth models or individual tree height-diameter models are applied. Since these models are often developed with different datasets, and model parameters are not estimated simultaneously, and therefore HDR derived from these models may be biased significantly (Hasenauer et al. 1998). Usefulness of these models is in fact determined by the credibility of the data used (Kamimura and Shiraishi 2007). Furthermore, a small bias associated with in those models may result in a substantially large bias in the derived HDR. Therefore, separate HDR models are needed for reliable prediction of HDR at the tree level, which is only possible with accurately measured dataset representing all characteristics such as site qualities, stand densities, size and age classes is used to develop HDR models.
Variation of HDR even for a single species within the same stand may be large due to inter-tree spacing. The most extreme HDR would reach for open-grown trees and for trees at a maximum stand density (Nykänen et al. 1997; Vospernik et al. 2010). The HDR also varies on the trees with top or lower canopy position of the stands. The HDR also varies with stand characteristics (stand age and stand density) and individual tree characteristics (height, tree root system, crown width, and crown depth) (Nykänen et al. 1997). Various site factors such as slope, altitude, exposition, soil type, soil moisture, and nutrients (Tilman 1988; Wiklund et al. 1995; Homeier et al. 2010; Martín-Alcón et al. 2010; Bošeľa et al. 2014) influence HDR. Site preparation, stocking, and provenance of tree species also influence HDR (Zimmerman and Brown 1971; Burton 1993; Mustard and Harper 1998). Location of stands such as stand on forest edge, stand in large gaps or unstable stand fragments also influence HDR (Lohmander and Helles 1987; Schelhaas et al. 2007; Mitchell 2013). The influence of stand density and competition on HDR is substantially high (Lohmander and Helles 1987; Slodičák 1995; Nykänen et al. 1997; Mäkinen et al. 2002; Slodicak and Novak 2006; Harrington et al. 2009; Vospernik et al. 2010; Mitchell 2013; Bošeľa et al. 2014). Inclusion of appropriate measures describing aforementioned characteristics, particularly stand density, competition, and site quality into the HDR models is thus necessary to increase the prediction accuracy of the models.
The stand density measures or competition measures are computed either considering tree position (spatially explicit competition measures) or without tree position (spatially non-explicit competition measures). The forest stand can be understood as a collection of individual trees interacting in a spatial manner over the restricted distance (Mailly et al. 2003; Canham et al. 2004, 2006; Canham and Uriarte 2006; Purves et al. 2007; Pretzsch 2009; Thorpe et al. 2010). Quantification of the influences of competitive interaction among the individual trees of varying size, species, and spatial patterns within a stand can be useful in decision-making for effective forest management. Even though several studies were carried out to show relationship between HDR and vulnerability of the trees or stands, only a few (Vospernik et al. 2010; Bošeľa et al. 2014) have developed statistical models through integration of the measures that describe stand density, competition, and site quality, into them. However, none of the studies have considered the spatial position of the trees while computing measures that describe competitive interaction among the individual trees. This study, thus, aims to develop statistical HDR models through integration of spatially explicit competition measures into them. This study utilizes a large dataset acquired from fully stem-mapped permanent research plots located in the stands of Norway spruce (Picea abies (L.) Karst.) and European beech (Fagus sylvatica L.) in various parts of the Czech Republic. The proposed models may serve as empirically-based useful tools in assessing stability of the trees and stands. Since Norway spruce is generally considered to be much more susceptible to damage by winds than other conifer and broad-leaved species (Peltola et al. 2000; Albrecht et al. 2012), the HDR models of Norway spruce may be more useful than that of European beech.
Materials and methods
Study area
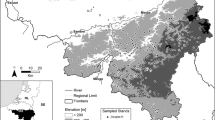
We used data from several Norway spruce and European beech stands where permanent research plots (PRPs) properly represent 18 Natural Forest Areas (NFA) in the Hercynian geo-morphological system (out of total 33 NFAs) (Fig. 1). The square-shaped PRPs (2500 m2) were established on the basis of canopy structure, natural regeneration, and stock of dead woods by following the Field-Map technology of the IFER-Monitoring and Mapping Solutions Ltd (Šmelko and Merganič 2008). The PRPs were established to include mainly “close-to-nature” or “natural” forests (because of unique structure and dynamics) in various stands and site conditions with varying degree of the effects of air pollution and soil acidification. The PRPs cover various regions of the country such as low and middle regions (Kokořínsko, Český kras, Křivoklátsko, and Třebechovice), high and mountain regions (Broumovsko, Krkonoše, Orlické hory, Jizerské hory, Šumava, and Jeseníky). The PRP network falls within the Protected Area System (National Park, Protected Landscape Area, Nature Reserve, Natural Monument) and covers a wide range of altitudes (240–1370 m), mean annual temperatures (4–9.5 °C), and mean annual precipitations (500–1550 mm). There is a large variation of mean growing season length (35–180 days). The mean growing season length is defined by the number of days in a year when the average daily temperature is ≥10 °C (Pokladníková et al. 2008). The most of the stands, especially European beech stands originated from natural regeneration, about 20 % Norway spruce and 2 % European beech stands originated from plantation. About 77 % of the stands were 20–50 years olds, and managed by spontaneous development with minimal harvests. This management system mainly involved sanitation interventions, e.g. extraction of trees affected by bark beetle (Ips typographus). Management of remaining parts of the forests focused mainly on the shelter wood systems with preferred natural regeneration. About 5 % Norway spruce dominated stands were planned for clear-cut management (after rotation period) on the edge of the protective zones (low degree of nature protection), where economic functions of the forests (private forests) prevailed. In-depth descriptions of these forests are also available in the literature (Vacek and Lepš 1996; Vacek et al. 2009, 2014, 2015). Data were collected as per the permission obtained from the authorities of the corresponding protected area offices.

Location of permanent research plots, PRPs [pure or Norway spruce dominated PRPs (black dots), pure or European beech dominated PRPs (dark gray triangles), light gray dots showing forest cover, and gray lines separating Natural Forest Areas, (NFAs)]
Measurements
Various tree and strand characteristics on the PRPs were measured between April 2007 and August 2015. Total heights and over-bark diameters at 1.3 m above ground (DBH) were precisely measured for all trees (individuals with DBH ≥4 cm) using Laser Vertex and caliper, respectively. The Laser Vertex (Haglöf Sweden 2011) is an instrument system-combo designed for efficient measurement of height, distance, and angle of inclination with combination of the ultrasound and laser light. The positions of all trees including smaller individuals (i.e., individuals with DBH <4 cm, but height ≥2) were recorded. All tree and stand characteristics were measured following the inventory protocols prepared by Forest Management Institute (FMI 2003). All data available to this study originated from the first measurement cycle of the PRPs.
Tree and stand characteristics
Total height to DBH ratio (HDR) is influenced by various tree and stand characteristics, and therefore we evaluated them depending on the availability in the data. These characteristics can be related to tree size, site quality, and stand density or competition (Hasenauer and Monserud 1996; Uzoh and Oliver 2008). The characteristics that describe tree size are DBH and total height, and height-DBH ratio, height to crown base, crown length, crown height, and crown ratio. However, to make the HDR models simpler, we included more easily accessible tree characteristics such as DBH and canopy classes. Site quality is described by mean height of the biggest trees on the stand (dominant height) or site index (dominant height at any reference age). The growth of dominant trees and site quality is strongly correlated, and therefore site quality is commonly assessed with site index (Monserud 1984; Raulier et al. 2003). When site index is not measured, dominant height can be used as its proxy variable to describe site quality (Temesgen et al. 2005; Crecente-Campo et al. 2010; Fu et al. 2013; Sharma et al. 2016). We also used dominant height in our HDR models as we lacked site index data. Depending on the numbers of height sample trees available, 10–20 biggest trees per PRP were chosen to calculate dominant height (HDOM) and dominant diameter (DDOM) following the methods suggested by Sharma et al. (2011, 2016). The mean height of all height sample trees per PRP (MEANHT), which also describes site quality, was also calculated. In addition to DDOM, other plot-centered competition measures (spatially non-explicit competition measures) such as number of stems per hectare (N), basal area per hectare (BA), arithmetic mean DBH (AMD) and quadratic mean DBH (QMD) per PRP were also calculated.
Tree-centered competition indices
Using coordinates of the trees (DBH ≥4 cm) and other smaller individuals (height ≥2 m and DBH <4 cm), we computed tree-centered competition measures. We considered all recorded species (1–20 species per PRP) as a single species to compute tree-centered competition index, disregarding species-specific competition effect. To reduce model’s complexity and avoid non-convergence problem potentially caused due to many species-specific parameters, we did not compute species-specific competition index (CI). We used two formulae to compute CI, also known as spatially explicit CI (or distance dependent CI). These indices [Eq. 1 (Hegyi 1974) and Eq. 2 (Martin and Ek 1984)] are based on the principle that larger and closer competitors contribute higher competitive stress to the subject trees.
where CI = competition index, DBH = diameter of tree, DIST = distance between subject tree and competitor, n = number of competitors for a given subject tree s, λ = edge expansion factor, s = index for subject trees, and c = index for competitors.
The crown dimensions-based CI (e.g., distance weighed by ratios of crown cross-sectional areas or crown volumes of subject trees and competitors) may better describe competitive interaction among the individual trees (Biging and Dobbertin 1992, 1995; Pretzsch 2009). However, measurements of the crown dimensions for a number of trees including species of the interest in our data were missing, while measurements of DBH and height for all individuals were available. Therefore, we chose only DBH-based CI to describe competitive interaction among the trees. We set a maximum distance around a given subject tree (search radius, SR) within which all potential competitors must be included. We applied twelve SR (4 horizontal angle-based and 8 vertical angle-based or vertical cone-based SR), which have also been evaluated by Biging and Dobbertin (1992) and Sharma et al. (2016), to include potential competitors around the subject trees. The definitions of SR along with their formulations are presented in Table 1.
The computation of CIs using two formulae (Eqs. 1, 2) with application of 12 search radii resulted in 24 CI alternatives. Our preliminary analyses involved the examination and comparison of the contributions of all 24 CIs to the description of HDR variations in the HDR models using fit statistics. The CI providing the largest contribution to the HDR models was then selected for further analyses. For each species, Hegyi’s index (CI1) computed with SR1 showed the best fitting of the models to the data. To reduce errors in the CI due to off-plot competitors, we applied edge expansion factor (Eqs. 1, 2) computed using the method suggested by Martin et al. (1977) and Goreaud and Pélissier (1999). The edge expansion factor may only work precisely well when stand conditions (in terms of tree size, species composition, and stem distribution pattern) are similar on both inside and outside the sample plot (Martin et al. 1977; Radtke and Burkhart 1998). Since the entire part of each PRP falls within a stand, these assumptions are more likely to hold. Summary statistics of all tree and stand characteristics including two best performing CI alternatives, one each from two CI formulae are presented in Table 2. The definition of pure species stands considered the inclusion of all individuals other than species of the interest (Norway spruce or European beech) if they had DBH <4 cm. Only 11 trees with extremely small HDR (i.e., <0.1) and 21 trees with extremely large HDR (i.e., >1.9 and up to 14), which seemed illogical relative to other tree characteristics (i.e., crown width and height to live crown base), were excluded by assuming that they were only caused by faulty recording or measurement. However, such exclusion was applied only after all stand density measures or competition measures were computed. A complete dataset used in modeling HDR is shown in Fig. 2.

Scattered plots of HDR against DBH for three different canopy classes [cc canopy class, 1: height >66 % height of tallest tree, 2: 33 % height of tallest tree < height < 66 % height of tallest tree, and 3: height <33 % height of tallest tree per sample plot]
Model development
Based on the patterns of the scattered plots of HDR against DBH (Fig. 2), an exponential decay function, hereafter termed as a base function (Eq. 3), was used to fit the data.
where HDR ij and DBH ij are height-diameter ratio and diameter at breast height of tree j (j = 1,…, m) on PRP i (i = 1,…, n), respectively, b 3 = 0.5, b 1 and b 2 are parameters to be estimated, ε ij is an error term, and m and n are numbers of trees and PRPs, respectively.
Since DBH is most strongly correlated with HDR, it was used as a main predictor variable in the HDR models. Since other tree and stand characteristics largely influence HDR, they were also included as additional predictor variables into the HDR models by applying two-stage approach (Ferguson and Leech 1978; Staudhammer and LeMay 2000). Because of biological logics, this approach has frequently been used to include appropriate predictor variables to develop forest models (Mehtatalo 2005; Adame et al. 2008; Sharma and Breidenbach 2015; Sharma et al. 2016). In the first stage, we fitted a base function (Eq. 3) to the data for each PRP separately and matrix-scattered plots of PRP-specific parameter estimates against each variable and its transformations (inverse, square, root) and interaction with other variables were examined. In the second stage, variables showing strong correlation with b 1 or b 2, were identified. For both species, HDOM, DDOM, and QMD showed strong relationship only with b 1. Thus, we redefined b 1 as a function of HDOM, DDOM, and QMD to expand the base function. Variations of the HDR within and across three canopies (Fig. 2) were also modeled using dummy variable approach, in which parameter b 2 was redefined as a function of dummy variable representing canopy classes (CCs). Since inventory crew did not differentiate trees by canopy class (i.e., suppressed, intermediate, dominant), we formed CCs on each PRP by assuming CC1: height >66 % height of tallest tree; CC2: 33 % height of tallest tree < height < 66 % height of tallest tree; and CC3: height <33 % height of tallest tree. The measurement of heights of all living trees on each PRP allowed us to make this classification.
where x 1 = HDOM i ; x 2 = DDOM i ; x 3 = QMD i or CI ij ; z i = CC k (when CC belongs to k then z k = 1, 0 otherwise); HDOM i , DDOM i and QMD i are dominant height (m), dominant diameter (cm), and quadratic mean diameter (cm), respectively, for PRP i; CI ij is spatially explicit competition index for tree j on PRP i; b 3 = 0.5; k = 1, 2, 3; α1–α4, φ1–φ3 = parameters to be estimated; all other symbols and abbreviations are the same as defined in Eqs. 1–3 or elsewhere in the text.
The model did not converge when b 3 was tried to be estimated along with all other parameters through optimization procedure. We compared sum of squared errors (SSE) resulted from several alternative formulations and values of b 3 (0.1–3 by 0.1 increment) and found that only formulation presented in Eq. 4 (with b 3 = 0.5) provided the smallest SSE. The models developed with CI is termed as spatially explicit models, and spatially non-explicit models, otherwise. We also fitted mixed effects version of Eq. 4 through inclusion of PRP-level variations as random effects. But mixed effects models did not converge because of complexity caused by several predictor variables involved.
Model estimation and evaluation
We estimated parameters of the models (Eqs. 3, 4) with nonlinear least square regression using PROC MODEL in SAS (SAS Institute Inc. 2008), applying Marquardt’s method. The fitted models were evaluated using root mean square error (RMSE) and adjusted coefficient of determination (R 2adj ) (Montgomery et al. 2001). Further evaluations were made with examination on the graphs of residuals plotted against each predictor variable (Table 2) and behaviors of the simulated HDR curves overlaid on the observed data. The effects of each predictor variable on HDR were also examined graphically. Unless otherwise specified, we used 1 % level of significance (α = 1 %) in all analyses.
The model validation provides the credibility and confidence about the estimated models (Soares et al. 1995; Vanclay and Skovsgaard 1997) and it is often carried out by splitting data: one dataset for fitting model and another for validation. This process is commonly known as cross validation (Vanclay 1994; Montgomery et al. 2001), but we did not perform this. Validation by splitting data does not provide more information in addition to the respective fit statistics obtained directly from the model fitted to the entire dataset (Kozak and Kozak 2003; Yang et al. 2004). Validating model with independent data collected from differing sampling methods or measurement occasions can be the best alternative (Vanclay 1994; Sharma et al. 2011; Sharma and Breidenbach 2015). The re-measurement data from the same PRPs in the future can be used for validation and recalibration of the presented HDR models.
Results
We developed HDR models using both spatially explicit and spatially non-explicit competition measures. We selected only those tree and stand characteristics, which displayed significantly large contributions to the HDR models. Among various potential predictor variables evaluated (Table 2), we identified most contributing ones: PRP-level dominant height (HDOM), dominant diameter (DDOM), quadratic mean diameter (QMD), and Hegyi’s competition index (CI1). Both spatially explicit and non-explicit models described large parts of the HDR variations (R 2adj = 0.65–0.72) (Table 3). Except parameter estimate of QMD (p = 0.0401) for Norway spruce, other parameter estimates of both model types were highly significant (p < 0.0001). The signs of parameter estimates were biologically plausible. Spatially explicit model for Norway spruce described relatively larger part of the HDR variations than its spatially non-explicit counterpart. However, spatially non-explicit model for European beech described larger part of the HDR variations. Except for those of x 3 (Eq. 4, where x 3 = QMD or CI1), difference of corresponding parameter estimates of other predictor variables of each model was too small. This indicated that HDOM, DDOM, and canopy height classes had similar effects on HDR of each model type. The models for Norway spruce appeared slightly poorer than the models for European beech.
We examined residual graphs of each model plotted against each of the predictor variables (Table 2). But for brevity, we have presented only important residual graphs here (Fig. 3). There was no serious deviation of the residuals across the observed ranged of each predictor variable and estimated HDR. There was no heteroskedasticity problem in the residuals either. No substantial difference was also observed on the graphs of the residuals produced with both model types for each species. Except for DBH classes of 10 and 20 cm for European beech and DBH class of 10 cm for Norway spruce, graphs displayed no serious residual trends across the observed DBH range. This indicated that the chosen base model (Eq. 3) and its extended form (Eq. 4) with selected predictor variables, and assumed canopy height classes were adequate enough to describe HDR variations for each species.

Residuals produced with spatially non-explicit HDR models (Eq. 4). The length of the box represents the interquartile range (IQR), length of the whisker represents class minimum and maximum values in IQR, small boxes represent observations lying beyond 1.5 times IQR (outlier observations lying far away from the median), and horizontal line and plus signs in the box represent median and mean values, respectively
We simulated the effects of the chosen predictor variables related to tree size (tree canopy class), site quality (HDOM), and stand density or competition (DDOM, QMD, CI) on HDR (Figs. 4, 5, 6). When the mean values of other predictor variables on the observed data by canopy height class were held constant, the effect of site quality (HDOM) on each model emerged as the largest one, followed by the effect of stand density or competition (DDOM, QMD or CI). The HDR significantly increased with increasing site quality (increased HDOM) and competitive interaction among the individual trees (decreased QMD and DDOM, or increased CI). However, the magnitudes of the effects of those characteristics on HDR for each canopy classes largely differed. Spatially non-explicit models displayed very small effects of QMD on HDR for each canopy class of Norway spruce, but large effect for European beech. However, unlike on Norway spruce, the effect of QMD of European beech emerged as significantly larger than that of CI. After DBH, three predictor variables: HDOM, DDOM and CI for Norway spruce and four: HDOM, DDOM, QMD, and CI for European beech displayed substantially large contributions to the HDR models.

HDR variations due to the effects of various stand characteristics as displayed by spatially non-explicit HDR model (Eq. 4) for different canopy height classes of Norway spruce [canopy class 1 (left column), canopy class 2 (middle column), and canopy class 3 (right column). Canopy classes are defined in Fig. 2 and Eq. 4]

HDR variations due to the effects of various stand characteristics as displayed by spatially non-explicit HDR model (Eq. 4) for different canopy height classes of European beech [canopy class 1 (left column), canopy class 2 (middle column), and canopy class 3 (right column). Canopy classes are defined in Fig. 2 and Eq. 4]
Discussion
Data used in this study have large variations (Table 2; Fig. 2), covering both pure and mixed species stands located on the low to high mountain regions of the Czech Republic (Fig. 1). Modeling data also covers wide stand densities, growth conditions, and management regimes (from clear cut to leaving spontaneous development). Since HDR is strongly correlated with DBH, this can be used as a single predictor variable in the allometric HDR model. However, DBH alone may not be adequate enough to develop more accurate HDR models, because allometric relationship between HDR and DBH largely varies with other tree and stand characteristics such as canopy classes, site qualities, and stand densities or competitive situations of the trees within a stand (Fig. 4, 5, 6). Therefore, this study involved the inclusion of appropriate measures describing those characteristics into the HDR models. Those characteristics, which significantly improved the model fits and consequently increased model’s scope of application to a greater extent, are dominant height (HDOM), dominant diameter (DDOM), quadratic mean diameter (QMD), and Hegyi’s competition index (CI1).

The models describe large parts of the HDR variations (Table 3) without any serious residual trend across the observed data range (Fig. 3). A slight under-estimation for DBH class of 10 cm for both species and over-estimation for DBH class of 20 cm for European beech was caused by the presence of highly influential outlier observations in such DBH classes. A considerable part of the HDR variations still remains to be described, and this might be due to a wider variation of the HDR in some DBH classes. A wider variation and unevenness distribution patterns of the HDR of Norway spruce (Fig. 2) might have resulted in poorer models than that for European beech. Accuracy of the HDR models may be increased through inclusion of additional predictor variables, but this leads to the over-parameterization, which results in biased parameter estimates (Montgomery et al. 2001). To make HDR models less costly and more applicable, some characteristics such as stand age, crown width and crown depth, which may be significantly correlated to HDR, but relatively costlier to measure, were not included to our models. Also, forest managers want more accurate and parsimonious models for effective management (Vanclay 1994).
For both species, HDOM emerged as the most contributing variable to each model (Figs. 4, 5). As expected, HDOM included as a proxy of site index into the HDR model worked adequately well. The site index, which is estimated using either dominant height growth models (Monserud 1984; Sharma et al. 2011) or site index prediction models (Seynave et al. 2005; Sharma et al. 2012) are commonly used to assess site quality. However, in a condition when these models are not available, HDOM can be included into the forest models (Soares and Tomé 2001; Temesgen et al. 2005; Crecente-Campo et al. 2010; Fu et al. 2013; Sharma et al. 2016). Only a few studies (e.g. Bošeľa et al. 2014) have included site index as a predictor variable into the HDR models. However, to the authors’ knowledge, none of the HDR models have been developed so far by including HDOM. As displayed by our models, HDR increases with increasing site index, because there can be much more growth resources (light, soil moisture and nutrients) availability on the better sites than on poorer sites (Bošeľa et al. 2014). For a given stand density or competitive interaction, the effect of site quality on HDR emerged the highest for each canopy class, but largely varies with canopy classes (Figs. 4, 5).
The HDR is significantly affected by competitive interaction among the trees within a stand. For a given site quality, HDR increases with increasing competition as depicted by decreased DDOM and QMD (Figs. 4, 5) or increased CI (Fig. 6). With increasing competition, DDOM or QMD decreases because of crowding of the trees that results in taller heights and smaller crowns, but thinner boles. In attempt to get higher canopy position for light, sub-ordinate trees have less diameter growth for a given unit of height growth as compared to the trees already grown to the top canopy position (Cremer et al. 1982; Nykänen et al. 1997; Mäkinen et al. 2002). However, the trees with dominant or co-dominant canopy positions are able to allocate more resources to diameter growth relative to height growth, and therefore have smaller HDR and are more stable as compared to sub-ordinate trees (Wonn and O’Hara 2001). The trees with extremely large HDR can only grow in a dense stand under the influence of mutual support of its neighboring trees (Nykänen et al. 1997; Valinger and Fridman 1997; Vospernik et al. 2010; Valinger and Fridman 2011; Bošeľa et al. 2014).
The competition measures (e.g. CI) for Norway spruce computed by using the information of spatial arrangement of the trees is expected to better describe competitive interaction than the competition measures (e.g., QMD) computed without spatial information. This is the reason that spatially explicit model relatively better fitted to the data of Norway spruce (Table 3) and exhibited more pronounced effects on HDR than spatially non-explicit model (Figs. 4, 6). However, this was not a case for European beech, in which spatially non-explicit competition measure (e.g., QMD) exhibited more pronounced effect on HDR than spatially explicit competition measure (Table 3; Figs. 5, 6). This may be due to less heterogeneous stand conditions of European beech as compared to that of Norway spruce. The competition of more complex and heterogeneous stands may be better described by spatially explicit measures than its spatially non-explicit counterparts (Lorimer 1983; Martin and Ek 1984; Biging and Dobbertin 1992, 1995; Corral-Rivas et al. 2005; Pretzsch 2009). The competition indices perform differently according to species, forest types, and forest conditions as competition varies with stand density, tree size, site quality, climate condition, and stand structure (Pretzsch and Biber 2010; Contreras et al. 2011). There may also be a species-specific effect on the competition (Pretzsch et al. 2002; Canham et al. 2004; Richards et al. 2008; Thorpe et al. 2010; von Oheimb et al. 2011). However, we did not consider this effect while computing CI to make our HDR model (Eq. 4) simpler.
This study utilized a large dataset with a number of tree and stand characteristics and therefore allowed us to evaluate the interactive influence of the many factors affecting HDR. The measurements of additional factors (e.g. slope, exposition, soil property, altitude, and species provenance), which may also significantly affect HDR (Zimmerman and Brown 1971; Tilman 1988; Burton 1993; Wiklund et al. 1995; Nykänen et al. 1997; Mustard and Harper 1998; Homeier et al. 2010; Martín-Alcón et al. 2010; Bošeľa et al. 2014), were not available to this study. The HDR models developed with time series data would be more reliable tools than those developed with one-time measurement data, which do not include history of stand management. Therefore, further works involving validation and recalibration of our models with re-measurement data will be useful to increase the reliability and confidence of the models.
For the stand conditions more or less similar to the basis of this study, our HDR models may be applied to the stands of Norway spruce and European beech in other European countries. The HDR is largely influenced by the numbers of factors (Figs. 4–6), which may also vary with forest stands across the European countries. It would be worthwhile that the major influential factors such as site quality, stand density, and competitive situations among the individual trees must be examined thoroughly and compared against those of the forests in the Czech Republic, before applying the HDR models in other countries. Some important stand characteristics such as site indices and stand density indices of species of the interest may be used for comparison of the forests across various European countries.
Conclusions and management implications
Using data from fully stem-mapped permanent research plot, we developed both spatially explicit and spatially non-explicit individual tree HDR models for two important tree species (Norway spruce and European beech) in the Czech Republic. Each model described a large part of the HDR variations without any serious residual deviation across the observed data range. For each species, there is a very small and insignificant difference between the fit statistics and residual graphs produced by both model types, suggesting that they have similar prediction behaviors. Because of simplicity, the spatially non-explicit model, which requires only sample plot-centered competition measures (quadratic mean diameter and mean diameter of dominant trees), is recommended to apply for both species.
By understanding the degree to which tree or stand of the trees is more susceptible to snow-, icing-, and wind-related damages, forest managers may better design treatments based on the range of HDR for silvicultural practices that help improve static stability of the trees and stands. Since HDR is used as reliable measure of tree or stand stability, the proposed HDR models may serve as useful tools to evaluate stand stability of Norway spruce and European beech. From this perspective, these models may also serve for assessing quality and efficiency of thinning, because thinning significantly affects HDR, both of mean stem, and even upper tree layer. The models will be useful to identify potentially more susceptible trees to damages due to snow and wind, and thus help remove those trees prior to damage. The HDR models can be used as sub-models in forest simulators, which are fundamental tools in management decision-making. The HDR models can be used in risk modeling, which includes all potential risk factors, e.g., climatic factors, and such models can be applied for assessment of overall risk of stability of the stands and forests. The HDR can be used as a measure of competitive interaction among individual trees within a stand, and therefore included into various forest models including individual tree growth models. The HDR models may also be used as benchmark models to compare HDR derived from other models such as height and diameter growth models, and height-diameter models.
Author contribution statement
Ram Sharma: performed data analysis, modelling, and manuscript writing; Zdeněk Vacek: contributed to data description and reviewed manuscript. Stanislav Vacek: provided data and reviewed manuscript.
References
Adame P, del Rio M, Canellas I (2008) A mixed nonlinear height-diameter model for pyrenean oak (Quercus pyrenaica Willd.). For Ecol Manage 256:88–98
Albrecht A, Hanewinkel M, Bauhus J, Kohnle U (2012) How does silviculture affect storm damage in forests of south-western Germany? Results from empirical modeling based on long-term observations. Eur J For Res 131:229–247
Biging GS, Dobbertin M (1992) Comparison of distance-dependent competition measures for height and basal area growth of individual conifer trees. For Sci 38:695–720
Biging GS, Dobbertin M (1995) Evaluation of competition indices in individual tree-growth models. For Sci 41:360–377
Bošeľa M, Konôpka B, Šebeň V, Vladovič J, Tobin B (2014) Modelling height to diameter ratio–an opportunity to increase Norway spruce stand stability in the Western Carpathians. Lesnicky Casopis For J 60:71–80
Burton PJ (1993) Some limitations inherent to static indices of plant competition. Can J For Res 23:2141–2152
Canham CD, Uriarte M (2006) Analysis of neighborhood dynamics of forest ecosystems using likelihood methods and modeling. Ecol Appl 16:62–73
Canham CD, LePage PT, Coates KD (2004) A neighborhood analysis of canopy tree competition: effects of shading versus crowding. Can J For Res 34:778–787
Canham CD, Papaik MJ, Uriarte M, McWilliams WH, Jenkins JC, Twery MJ (2006) Neighborhood analyses of canopy tree competition along environmental gradients in new England forests. Ecol Appl 16:540–554
Castedo-Dorado F, Crecente-Campo F, Ãlvarez-Ãlvarez P, Barrio-Anta M (2009) Development of a stand density management diagram for radiata pine stands including assessment of stand stability. Forestry 82:1–16
Contreras MA, Affleck D, Chung W (2011) Evaluating tree competition indices as predictors of basal area increment in western Montana forests. For Ecol Manage 262:1939–1949
Corral-Rivas JJ, Gonzalez JGA, Aguirre O, Hernandez F (2005) The effect of competition on individual tree basal area growth in mature stands of Pinus cooperi Blanco in Durango (Mexico). Eur J For Res 124:133–142
Crecente-Campo F, Tomé M, Soares P, Dieguez-Aranda U (2010) A generalized nonlinear mixed-effects height-diameter model for Eucalyptus globulus L. in northwestern Spain. For Ecol Manage 259:943–952
Cremer KW, Borough CJ, McKinnell FH, Carter PR (1982) Effects of stocking and thinning on wind damage in plantation. NZJ For Sci 12:244–268
Ferguson IS, Leech JW (1978) Generalized least squares estimation of yield functions. For Sci 24:27–42
FMI (2003). Inventarizace lesů, metodika venkovního sběru dat [Forest inventory, field data collection methodology]. Brandýs nad Labem 136 p
Fu L, Sun H, Sharma RP, Lei Y, Zhang H, Tang S (2013) Nonlinear mixed-effects crown width models for individual trees of Chinese fir (Cunninghamia lanceolata) in south-central China. For Ecol Manage 302:210–220
Gardiner B, Peltola H, Kellomäki S (2000) Comparison of two models for predicting the critical wind speeds required to damage coniferous trees. Ecol Modell 129:1–23
Goreaud F, Pélissier R (1999) On explicit formulae of edge effect correction for Ripley’s K-function. J Veg Sci 10:433–438
Harrington TB, Harrington CA, DeBell DS (2009) Effects of planting spacing and site quality on 25-year growth and mortality relationships of Douglas-fir (Pseudotsuga menziesii var. menziesii). For Ecol Manage 258:18–25
Hasenauer H, Monserud RA (1996) A crown ratio model for Austrian forests. For Ecol Manage 84:49–60
Hasenauer H, Monserud RA, Gregoire TG (1998) Using simultaneous regression techniques with individual-tree growth models. For Sci 44:87–95
Hegyi F (1974) A simulation model for managing jack-pine stands. In: Fries J (ed.), Growth models for tree and stand simulation. Royal College of Forestry, Stockholm, Research Note 30, p 74–90
Hlásný T, Křístek Š, Holuša J, Trombik J, Urbaňcová N (2011) Snow disturbances in secondary Norway spruce forests in central Europe: regression modeling and its implications for forest management. For Ecol Manage 262:2151–2161
Homeier J, Breckle S-W, Günter S, Rollenbeck RT, Leuschner C (2010) Tree diversity, forest structure and productivity along altitudinal and topographical gradients in a species-rich Ecuadorian montane rain forest. Biotropica 42:140–148
Jiao-jun Z, Feng-qin L, Yutaka G, Matsuzaki T, Yamamoto M (2003) Effects of thinning on wind damage in Pinus thunbergii plantation. J For Res 14:1–8
Kamimura K, Shiraishi N (2007) A review of strategies for wind damage assessment in Japanese forests. J For Res 12:162–176
Kamimura K, Gardiner B, Kato A, Hiroshima T, Shiraishi N (2008) Developing a decision support approach to reduce wind damage risk–a case study on sugi (Cryptomeria japonica (L.f.) D. Don) forests in Japan. Forestry 81:429–445
Konôpka B, Konôpka J (2003) Static stability of forest stands in the seventh altitudinal vegetation zone in Slovakia. J For Sci 49:474–481
Kozak A, Kozak R (2003) Does cross validation provide additional information in the evaluation of regression models? Can J For Res 33:976–987
Lohmander P, Helles F (1987) Windthrow probability as a function of stand characteristics and shelter. Scand J For Res 2:227–238
Lorimer CG (1983) Test of age-independent competition indices for individual trees in natural hardwood stands. For Ecol Manage 6:343–360
MacDonald B, Morris DM, Marshall PL (1990) Assessing components of competition indices for young boreal plantations. Can J For Res 20:1060–1068
Mailly D, Turbis S, Pothier D (2003) Predicting basal area increment in a spatially explicit, individual tree model: a test of competition measures with black spruce. Can J For Res 33:435–443
Mäkinen H, Nöjd P, Isomäki A (2002) Radial, height and volume increment variation in Picea abies (L.) Karst. Stands with varying thinning intensities. Scand J For Res 17:304–316
Martin GL, Ek AR (1984) A comparison of competition measures and growth models for predicting plantation red pine diameter and height growth. For Sci 30:731–743
Martin GL, Ek AR, Monserud RA (1977) Control of plot edge bias in forest stand growth simulation models. Can J For Res 7:100–105
Martín-Alcón S, González-Olabarría JR, Coll L (2010) Wind and snow damage in the Pyrenees pine forests: effect of stand attributes and location. Silva Fenn 44:399–410
Mehtatalo L (2005) Height-diameter models for Scots pine and birch in Finland. Silva Fenn 39:55–66
Mickovski SB, Stokes A, Beek LPH (2005) A decision support tool for wind throw hazard assessment and prevention. For Ecol Manage 216:64–76
Mitchell SJ (2013) Wind as a natural disturbance agent in forests: a synthesis. Forestry 86:147–157
Monserud RA (1984) Height growth and site index curves for inland Douglas-fir based on stem analysis data and forest habitat type. For Sci 30:943–965
Montgomery DC, Peck EA, Vining GG (2001) Introduction to linear regression analysis. Wiley, New York, pp 641
Moore JR (2000) Differences in maximum resistive bending moments of Pinus radiata trees grown on a range of soil types. For Ecol Manage 135:63–71
Morris DM, MacDonald GB (1991) Development of a competition index for young conifer plantations established on boreal mixed wood sites. For Chron 67:403–410
Mustard J, Harper G (1998) A summary of the available information on height to diameter ratio. BC Ministry of Forests, Victoria, p 120
Nykänen ML, Peltola H, Quine C, Kellomäki S, Broadgate M (1997) Factors affecting snow damage of trees with particular reference to European conditions. Silva Fenn 31:193–213
O’Hara KL, Oliver CD (1999) A decision system for assessing stand differentiation potential and prioritizing pre-commercial thinning treatments. West J Appl For 14:7–13
Opio C, Jacob N, Coopersmith D (2000) Height to diameter ratio as a competition index for young conifer plantations in northern British Columbia, Canada. For Ecol Manage 137:245–252
Päätalo M-L, Peltola H, Kellomäki S (1999) Modelling the risk of snow damage to forests under short-term snow loading. For Ecol Manage 116:51–70
Peltola HM (2006) Mechanical stability of trees under static loads. Am J Bot 93:1501–1511
Peltola H, Kellomäki S, Väisänen H, Ikonen VP (1999) A mechanistic model for assessing the risk of wind and snow damage to single trees and stands of Scots pine, Norway spruce, and birch. Can J For Res 29:647–661
Peltola H, Kellomäki S, Hassinen A, Granander M (2000) Mechanical stability of Scots pine, Norway spruce and birch: an analysis of tree-pulling experiments in Finland. For Ecol Manage 135:143–153
Pokladníková H, Rožnovský J, Mužíková B (2008) Vybrané argoklimatické charakteristiky České republiky na základě klimatických dat v gridu 10 km (Choosing argo-climatic characteristics of the Czech Republic on the basis of climatic data from (10 × 10) km grids. In: Litschmann T (ed) Rožnovský, J. Bioklimatologické aspekty hodnocení procesů v krajině, Mikulov, pp 30–38
Pretzsch H (2009) Forest dynamics, growth and yield: from measurement to model. Springer Verlag, Berlin, p 664
Pretzsch H, Biber P (2010) Size-symmetric versus size-asymmetric competition and growth partitioning among trees in forest stands along an ecological gradient in central Europe. Can J For Res 40:370–384
Pretzsch H, Biber P, Dursky J (2002) The single tree-based stand simulator SILVA: construction, application and evaluation. For Ecol Manage 162:3–21
Purves DW, Lichstein JW, Pacala SW (2007) Crown plasticity and competition for canopy space: a new spatially implicit model parameterized for 250 North American tree species. PLoS One 2:e870
Radtke PJ, Burkhart HE (1998) A comparison of methods for edge-bias compensation. Can J For Res 28:942–945
Raulier F, Lambert M-C, Pothier D, Ung C-H (2003) Impact of dominant tree dynamics on site index curves. For Ecol Manage 184:65–78
Richards M, McDonald AJS, Aitkenhead MJ (2008) Optimization of competition indices using simulated annealing and artificial neural networks. Ecol Modell 214:375–384
SAS Institute Inc (2008) SAS/ETS1 9.1.3 User’s Guide. SAS Institute Inc., Cary
Schelhaas MJ, Kramer K, Peltola H, van der Werf DC, Wijdeven SMJ (2007) Introducing tree interactions in wind damage simulation. Ecol Modell 207:197–209
Schindler D, Jr Bauhus, Mayer H (2012) Wind effects on trees. Eur J For Res 131:159–163
Schütz J-P, Götz M, Schmid W, Mandallaz D (2006) Vulnerability of spruce (Picea abies) and beech (Fagus sylvatica) forest stands to storms and consequences for silviculture. Eur J For Res 125:291–302
Seynave I, Gegout JC, Herve JC, Dhote JF, Drapier J, Bruno E, Dume G (2005) Picea abies site index prediction by environmental factors and understory vegetation: a two-scale approach based on survey databases. Can J For Res 35:1669–1678
Sharma RP, Breidenbach J (2015) Modeling height-diameter relationships for Norway spruce, Scots pine, and downy birch using Norwegian national forest inventory data. For Sci Tech 11:44–53
Sharma RP, Brunner A, Eid T, Øyen B-H (2011) Modelling dominant height growth from national forest inventory individual tree data with short time series and large age errors. For Ecol Manage 262:2162–2175
Sharma RP, Brunner A, Eid T (2012) Site index prediction from site and climate variables for Norway spruce and Scots pine in Norway. Scand J For Res 27:619–636
Sharma RP, Vacek Z, Vacek S (2016) Individual tree crown width models for Norway spruce and European beech in Czech Republic. For Ecol Manage 366:208–220
Slodičák M (1995) Thinning regime in stands of Norway spruce subjected to snow and wind damage. In: Coutts MP, Grace J (eds) Wind and trees. Cambridge University, Cambridge, pp 436–447
Slodicak M, Novak J (2006) Silvicultural measures to increase the mechanical stability of pure secondary Norway spruce stands before conversion. For Ecol Manage 224:252–257
Šmelko ŠS, Merganič J (2008) Some methodological aspects of the national forest inventory and monitoring in Slovakia. J For Sci 54:476–483
Smith JHG (1986) Projections of stand yields and values to age 100 for Douglas-fir western red cedar, and western hemlock and implications for management from the UBC forest spacing trials. Faculty of Forestry, University of British Columbia, Vancouver, p 16
Soares P, Tomé M (2001) A tree crown ratio prediction equation for eucalypt plantations. Ann For Sci 58:193–202
Soares P, Tomé M, Skovsgaard JP, Vanclay JK (1995) Evaluating a growth model for forest management using continuous forest inventory data. For Ecol Manage 71:251–265
Staudhammer C, LeMay V (2000) Height prediction equations using diameter and stand density measures. For Chron 76:303–309
Sweden Haglöf (2011) Vertex Laser VL402 user’s manual. Långsele, Sweden, pp 41
Temesgen H, LeMay V, Mitchell SJ (2005) Tree crown ratio models for multi-species and multi-layered stands of southeastern British Columbia. For Chron 81:133–141
Thorpe HC, Astrup R, Trowbridge A, Coates KD (2010) Competition and tree crowns: a neighborhood analysis of three boreal tree species. For Ecol Manage 259:1586–1596
Tilman D (1988) Plant strategies and the dynamics and the structure of plant communities. Princeton University, Princeton, pp 360
Urata T, Shibuya M, Koizumi A, Torita H, Cha J (2011) Both stem and crown mass affect tree resistance to uprooting. J For Res 17:65–71
Uzoh FCC, Oliver WW (2008) Individual tree diameter increment model for managed even-aged stands of ponderosa pine throughout the western United States using a multilevel linear mixed effects model. For Ecol Manage 256:438–445
Vacek S, Lepš J (1996) Spatial dynamics of forest decline: the role of neighboring trees. J Veg Sci 7:789–798
Vacek S, Hejcman M, Semelová V, Remeš J, Podrázský V (2009) Effect of soil chemical properties on growth, foliation and nutrition of Norway spruce stand affected by yellowing in the Bohemian Forest Mts., Czech Republic. Eur J For Res 128:367–375
Vacek Z, Vacek S, Bílek L, Král J, Remeš J, Bulušek D, Králíček I (2014) Ungulate impact on natural regeneration in spruce-beech-fir stands in Černý důl nature reserve in the Orlické Hory mountains, case study from central Sudetes. Forests 5:2929–2946
Vacek Z, Vacek S, Podrázský V, Bílek L, Štefančík I, Moser WK, Bulušek D, Král J, Remeš J, Králíček I (2015) Effect of tree layer and microsite on the variability of natural regeneration in autochthonous beech forests. Polish J Ecol 63:233–246
Valinger E, Fridman J (1997) Modelling probability of snow and wind damage in Scots pine stands using tree characteristics. For Ecol Manage 97:215–222
Valinger E, Fridman J (2011) Factors affecting the probability of wind throw at stand level as a result of Gudrun winter storm in southern Sweden. For Ecol Manage 262:398–403
Vanclay JK (1994) Modelling forest growth and yield. Applications to mixed tropical forests. CAB International, Oxon, p 312
Vanclay JK, Skovsgaard JP (1997) Evaluating forest growth models. Ecol Modell 98:1–12
von Oheimb G, Lang AC, Bruelheide H, Forrester DI, Wäsche I, Yu M, Härdtle W (2011) Individual-tree radial growth in a subtropical broad-leaved forest: the role of local neighborhood competition. For Ecol Manage 261:499–507
Vospernik S, Monserud RA, Sterba H (2010) Do individual-tree growth models correctly represent height:diameter ratios of Norway spruce and Scots pine? For Ecol Manage 260:1735–1753
Wallentin C, Nilsson U (2014) Storm and snow damage in a Norway spruce thinning experiment in southern Sweden. Forestry 87:229–238
Wiklund K, Konôpka B, Nilsson LO (1995) Stem form and growth in Picea abies (L.) karst, in response to water and mineral nutrient availability. Scand J For Res 10:326–332
Wonn HT, O’Hara KL (2001) Height: diameter ratios and stability relationships for four northern rocky mountain tree species. West J Appl For 16:87–94
Yang YQ, Monserud RA, Huang SM (2004) An evaluation of diagnostic tests and their roles in validating forest biometric models. Can J For Res 34:619–629
Zimmerman MH, Brown CL (1971) Trees: structure and function. Springer, New York, pp 336
Acknowledgments
This study was Supported by the projects Optimization of Agriculture Land Afforestation in Relation to Increase of Landscape Retention Potential (Project No. QJ1320122) and Internal Grant Agency (IGA No. B08/15), Faculty of Forestry and Wood Sciences, Czech University of Life Sciences Prague. We thank two anonymous reviewers for their constructive comments and suggestions that helped improve the manuscript.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no conflict of interest.
Additional information
Communicated by T. Roetzer.
Rights and permissions
About this article

Cite this article
Sharma, R.P., Vacek, Z. & Vacek, S. Modeling individual tree height to diameter ratio for Norway spruce and European beech in Czech Republic. Trees 30, 1969–1982 (2016). https://doi.org/10.1007/s00468-016-1425-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00468-016-1425-2