
Abstract
Background
Techniques of mixed reality can successfully be used in preoperative planning of laparoscopic and robotic procedures and to guide surgical dissection and enhance its accuracy.
Methods
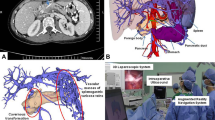
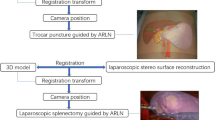
A computer-generated three-dimensional (3D) model of the vascular anatomy of the spleen was obtained from the computed tomography (CT) dataset of a patient with a 3-cm splenic artery aneurysm. Using an environmental infrared localizer and a stereoscopic helmet, the surgeon can see the patient’s anatomy in transparency (augmented or mixed reality). This arrangement simplifies correct positioning of trocars and locates surgical dissection directly on top of the aneurysm. In this way the surgeon limits unnecessary dissection, leaving intact the blood supply from the short gastric vessels and other collaterals. Based on preoperative planning, we were able to anticipate that the vascular exclusion of the aneurysm would result in partial splenic ischemia. To re-establish the flow to the spleen, end-to-end robotic anastomosis of the splenic artery with the Da Vinci surgical system was then performed. Finally, the aneurysm was fenestrated to exclude arterial refilling.
Results
The postoperative course was uneventful. A control CT scan 4 weeks after surgery showed a well-perfused and homogeneous splenic parenchyma. The final 3D model showed the fenestrated calcified aneurysm and patency of the re-anastomosed splenic artery.
Conclusions
The described technique of robotic vascular exclusion of a splenic artery aneurysm, followed by re-anastomosis of the vessel, clearly demonstrates how this technology can reduce the invasiveness of the procedure, obviating an otherwise necessary splenectomy. Also, the use of intraoperative mixed-reality technology proved very useful in this case and is expected to play an increasing role in the operating room of the future.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Disclosures
Drs. Andrea Pietrabissa, Luca Morelli, Mauro Ferrari, Andrea Peri, Vincenzo Ferrari, Andrea Moglia, Luigi Pugliese, Fabio Guarracino, and Franco Mosca have no conflicts of interest or financial ties to disclose.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 1 (MPG 215906 kb)
Rights and permissions
About this article
Cite this article
Pietrabissa, A., Morelli, L., Ferrari, M. et al. Mixed reality for robotic treatment of a splenic artery aneurysm. Surg Endosc 24, 1204 (2010). https://doi.org/10.1007/s00464-009-0703-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-009-0703-0