Abstract
Grey wolves (Canis lupus), formerly extirpated in Finland, have recolonized a boreal forest environment that has been significantly altered by humans, becoming a patchwork of managed forests and clearcuts crisscrossed by roads, power lines, and railways. Little is known about how the wolves utilize this impacted ecosystem, especially during the pup-rearing summer months. We tracked two wolves instrumented with GPS collars transmitting at 30-min intervals during two summers in eastern Finland, visiting all locations in the field, identifying prey items and classifying movement behaviors. We analyzed preference and avoidance of habitat types, linear elements and habitat edges, and tested the generality of our results against lower resolution summer movements of 23 other collared wolves. Wolves tended to show a strong preference for transitional woodlands (mostly harvested clearcuts) and mixed forests over coniferous forests and to use forest roads and low use linear elements to facilitate movement. The high density of primary roads in one wolf’s territory led to more constrained use of the home territory compared to the wolf with fewer roads, suggesting avoidance of humans; however, there did not appear to be large differences on the hunting success or the success of pup rearing for the two packs. In total, 90 kills were identified, almost entirely moose (Alces alces) and reindeer (Rangifer tarandus sspp.) calves of which a large proportion were killed in transitional woodlands. Generally, wolves displayed a high level of adaptability, successfully exploiting direct and indirect human-derived modifications to the boreal forest environment.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Wolves (Canis lupus) are considered habitat generalists (Mech 1970; Fritts 2003) that once occupied a wide range in the northern hemisphere worldwide before extirpation from large portions of their global range (Mech 1970; Boitani 2003). In Finland, wolves were extirpated in the 1920s (Pullianen 1993) until influxes from Russian Karelia to northern and eastern Finland in the 1970s led to an established population which currently numbers around 200 individuals (Kojola et al. 2006). This population was, until recently, concentrated in the central eastern part of Finland near the Russian border (Kojola et al. 2006), but established packs are now also found in the western part of the country (Fig. 1).

Location of the study area in Finland. The polygons represent wolf summer home range territories based on minimum convex polygons (MCPs) of all locations in June and July. The two darker regions in the northeast are the territories of F06 and M08 (west–east, respectively)
Habitats that have been recolonized by wolves in Finland have been significantly altered by intensive forestry practices and human settlements (Löfman and Kouki 2003; Kojola et al. 2004, 2006; Kaartinen et al. 2005). Aside from altering the spatial configuration of the landscape, these modifications have impacted the relative distribution and density of prey species. The primary prey of wolves across Finland is moose (Alces alces) (Gade-Jørgensen and Stagegaard 2000; Kojola et al. 2004), an abundant browser that prefers young forests and indirectly benefits from forestry practices (Edenius et al. 2002). In eastern Finland, an important additional prey species is wild forest reindeer (Rangifer tarandus fennicus), which prefers older forests than moose, is classified as threatened, and may be limited by wolf predation (Kojola et al. 2004, 2009). Finally, wolves in the northernmost part of the range occasionally prey on free-ranging semi-domesticated reindeer (R. t. tarandus) (Bisi et al. 2007; Kojola et al. 2009). Within the reindeer husbandry territory, which is separated from southern Finland by an exclusion fence extending across the entire country, no established wolf packs exist (Kojola et al. 2006).
In addition to habitat modification, humans have impacted the landscape in the form of primary (paved) roads and forest (unpaved) roads. Primary roads can lead to direct human-caused mortality, and their avoidance by wolves has been well documented (Whittington et al. 2004, 2005; Kaartinen et al. 2005; Karlsson et al. 2007; Jędrzejewski et al. 2008). Wolf response to low-use or forest roads has been found to be variable: in some areas, wolves select for these features due to ease of travel across their territory (Fritts 2003), whereas in other places, wolves avoid any signs of human activity, including hiking trails (Whittington et al. 2005). Aside from potentially providing movement corridors, construction of forest roads and habitat fragmentation increases the amount of transitional habitats and early successional growth of deciduous plants preferred by ungulate browsers (Edenius et al. 2002). The effect of these modifications on the fine-scale movement behavior of wolves is unknown.
In general, territorial movement behavior of wolves is shaped by the need to search for and capture prey and to patrol and mark territories (Mech 1970). Most studies of movement and foraging behavior of wolves in boreal forests have been confined to winter months, when following tracks and identifying carcasses is facilitated by visibility and the ability to snow-track (Ciucci et al. 2003; Whittington et al. 2004, 2005; Bergman et al. 2006; Sand et al. 2006). In the summer months, the critical pup-rearing process occurs and wolf movements are further constrained by the need to return regularly to designated den sites (Mech and Boitani 2003). There have been, however, far fewer studies of summer movements in boreal environments. Notably, Sand et al. (2008) combined field telemetry and field visits in Sweden to determine that summer predation rates can be considerably higher than in the winter, further underlining the importance of the summer period.
In this study, we provide a detailed analysis of movements, habitat use and predation during the pup-rearing summer period using a combination of satellite telemetry, comprehensive field tracking and remotely sensed landscape data, with a focus on exploring the impact of human-modified habitat features on wolf behavior. We report on two wolves representing distinct packs from two similar territories in eastern Finland. One territory, however, is traversed by a large number of roads and partially overlaps with the reindeer husbandry area of northern Finland (and is consequently transected by a fence) whereas the second territory is largely free of high impact linear elements. We hypothesized that the movements of these wolves would be shaped in large part by the primary roads and the reindeer fence, and by differences in the availability of prey. We further hypothesized that habitat use and movement behavior may show distinct features during different movement phases (e.g., homing, searching for prey, killing), but did not have a prediction on the direction of these differences. Finally, we tested the generality of the results on the two wolves by analyzing data on 23 other wolves that were tracked remotely at a lower temporal resolution from areas throughout the Finnish wolf range.
Materials and methods
Study area
The study focused on wolves primarily distributed across a band in the central part of Finland, with the greatest concentration in the east near the Russian border (Fig. 1). Throughout the study area, the habitat is coniferous boreal forest dominated by Scotch pine (Pinus sylvestris), Norway spruce (Picea abies) and birch (Betula pendula and B. pubescens). As a result of extensive logging, clear cuts and young successional mixed forests are common. The landscape is further dotted with lakes and peat bogs. About half of the bogs have been drained. Moose (Alces alces) and reindeer (Rangifer tarandus L.) are the two resident ungulate species in the study area (Kojola et al. 2004). Reindeer include the wild forest subspecies (R. t. fennicus) and the free-ranging semi-domesticated reindeer (R. t. tarandus). The distribution of wild forest reindeer is limited to the north by the area of semi-domesticated reindeer management, separated physically by a fence extending across Finland at roughly 65°N. North of this border, wolves have no legal protection and are commonly killed by local hunters (Kojola et al. 2006). The territories of the two field tracked wolves (denoted F06 and M08) were near the north-easternmost extent of the Finnish wolf range. M08’s territory partially overlaps with the semi-domesticated reindeer area.
Capture and handling
Wolves were captured and collared between 2002 and 2008 in March according to the methods described in Kojola et al. (2006). Individuals were captured using snowmobiles when the snow was soft and at least 80 cm deep. Snowmobiles were driven alongside wolves, which were looped using a neck-hold noose attached to a pole. The wolves were placed in a wooden box that had been strengthened with a metal grating around the outside and had doors at both ends. Wolves were kept in the box for at least 30 min before injecting them with a mixture of medetomin and ketamin with a dose ratio of 1:20 (Jalanka and Roeken 1990). The wolves were equipped with collars that contained global positioning system receivers (GPS Plus 2; Vectronic Aerospace, Berlin, Germany) and Very High Frequency (VHF) radio beacon transmitters (Televilt, Lindesberg, Sweden). Capture, handling, and anesthetizing of the wolves met the guidelines issued by the Animal Care and Use Committee at the University of Oulu and permits provided by the provincial government of Oulu (OLH-01951/Ym-23). Between 2002 and 2008, 47 wolves were captured and instrumented. The collars transmitted locations at intervals ranging from 0.5 to 8 h (2 wolves at 0.5 h, 1 at 3 h, 32 wolves at 4 h, 1 at 6 h, and 4 at 8 h). The two wolves that were tracked at 0.5-h intervals, a female in 2006 and a male in 2008 (referred to as F06 and M08), were further tracked intensively on the ground as described in the next section. While many of the tags operated over many months and some over years, we limited our analysis to the data collected in the months of June and July, corresponding to the period of intensive field tracking. Within this period, the lower resolution tags operated with variable reliability, between 6 and 42% of the locations were missing (mean 23%, SD 10%). The two intensively tracked wolves, whose collar interface was operated via Global System for Mobile Communications (GSM) using Short Message Service (SMS), provided much more reliable location fixes, with only 0.8 and 0.3%, respectively, of F06’s and M08’s positions missing.
Field data collection
The two wolves tracked at the highest resolution were also tracked intensively in the field. Their GPS positions were received and mapped using ArcMap (ESRI, Redlands, CA) and uploaded to handheld GPS receivers (Garmin eTREX) to enable finding wolf locations in the field. In order to avoid disturbance, a minimum 5-day time lag was maintained before the positions were surveyed, and positions identified at or near the den site were not visited at all. A minimum radius of 25 m around each location was surveyed with the help of trained tracking dogs, who were able to efficiently identify signs of wolf presence such as carcasses, caches, bedding sites, and scats. In 2006, the female wolf F06 was tracked from May 22 to July 20 (58 tracking days) and in 2008, the male wolf M08 was tracked from June 1 to July 31 (61 tracking days). The wolves represented breeding individuals of separate territories and thus distinct packs. Snow tracking in the subsequent early winter indicated that M08’s pack size was 9–11 wolves, with an estimated 8 pups reared, while F06’s pack consisted of 6 wolves with 4 pups.
Classifying locations and movement behaviors
Each GPS position from F06 and M08 was associated with one of five location classifications in the field: kill, at prey, at den, at rest, and movement. The first location at which a prey item was found in the field was classified as a kill site. At prey included subsequent wolf locations at killed prey or in the vicinity of carcasses. At den includes wolf locations at or near the den. At rest includes locations where resting and bedding sites were identified by matted undergrowth with identifiable wolf hairs and that consisted of multiple consecutive positions in the same location. All transitional positions between prey, den and resting sites were classified as movement.
Movement steps, defined as the vectors connecting consecutive movement locations, were further classified according to one of four movement behaviors, reflecting the assumed motivation of the wolves’ movement. A series of consecutive steps leading towards a kill, starting at a den site, bedding site or prey site were classified as hunting behavior; a consecutive series of movement steps preceding a return to the den were classified as homing. Movement steps preceding returns to previous kill sites and caches were classified as return to prey. Movement steps that did not fall into any of these classes were classified as unknown. The identification of movement behaviors was performed by an automated algorithm to minimize subjective interpretation of wolf behaviors. An example of the assignment of location classifications and movement behaviors for a single trip is given in Table 1, corresponding to the track illustrated in Fig. 2.

Plot of single trip for grey wolf (Canis lupus) M08, corresponding to Table 1. The colored polygons represent the habitat types, the lines the linear elements (primary roads, forest roads, and rivers), and GPS locations are denoted by triangles. The trip (bold striped line) was taken in a clockwise direction beginning at the den (diamond), moving westward to the killing of a moose calf (asterisk), northeastward to the killing of reindeer calf (circle with cross), and returning home. Hunting behaviors are downward pointed triangles, homing behaviors as upward pointed triangles
Landscape data
Landscape data consisted of two components: habitat type data and linear element data. Habitat types were based on the European-wide CORINE Land Cover 2000 (CLC2000) satellite image database, which has been rendered into vector format with minimum mapping unit of 25 ha by the Finnish Environmental Institute (Büttner et al. 2004). The following six land classes (LC) covered over 99.9% of the home range areas of F06 and M08: freshwater bodies (mostly natural lakes and ponds, LC 5.1.2), cultivated land (LC 2.4.3), bogs (LC 4.1.2), open woodlands (logging areas, thickets and transitional shrubs, maximum tree height 5 m and crown coverage 10–30%, LC 3.2.4), mixed forests (crown coverage of both deciduous and coniferous trees <70%, LC 3.1.3), and coniferous forests (fir tree dominance with >75% of crown coverage, LC 3.1.2). The three forest classes accounted for >80% of the land cover within the territories of all the wolves included in the analysis, defined as the total 100% minimum convex polygon (MCP) of the data (Ciucci et al. 1997).
Linear elements were digitized from a database provided by the National Land Survey of Finland (Maanmittauslaitos) and from the Finnish Transport Agency (Digiroad 2010). The following eight types were included: primary roads (two or more lanes, minimum width 5 m), forest roads (gravel roads, no more than 5 m width), power lines, rivers, reindeer fence, and edges between habitat types. We included only three types of edges: forest edges (referring to borders between open woodland and coniferous or mixed forests), bog edges (borders between bogs and any type of forest) and lake edges (borders between lakes and any type of forest).
The underlying habitat type and distance to the nearest linear element of each type was recorded for each location using ArcGIS 9.2 (ESRI) and analyzed using the maptools and splancs package in the R programming language (R Development Core Team 2009).
Construction of randomized null hypotheses
We constructed two different null hypotheses to test whether the locations and movement steps reflected non-random selection of habitats based on availability in the landscape. A null set (n = 100,000) of locations (denoted by RI) was drawn from the MCP of all the wolves’ positions, excluding lakes and ponds. A second null set (denoted by RII) was generated by creating a sample of potential movement locations around the observed locations. These potential locations were obtained by computing the distance and turning angle for 30 randomly selected movement steps, and adding those steps to the preceding location (Fig. 3). Statistical comparisons with RII are more conservative than comparisons with RI, since RII reflects the conditions at locations where the wolf could have moved rather than drawing from the entire MCP. The RII comparison thereby accounts for spatial autocorrelation in the habitat structure at the scale of the wolves’ typical half-hour movement step. RI was obtained for both the high and low resolution wolf datasets, while RII was only obtained for the high resolution wolves F06 and M08.

Schematic of the RII null set (filled squares) used to compare habitat preferences with the observed wolf position Z 2 (dark bullets). Thirty randomly drawn steps from F06’s movement data are illustrated
Statistical analyses for the detailed data on the two wolves
We used the observed locations and the randomized null datasets to test a set of null hypotheses in order to identify significant preference or avoidance of any specific habitat feature (landscape type or linear element) compared to a test null set. Significance tests were performed following a sequential hierarchy from the most general to the most specific null test set. Thus, for each habitat type and linear element use, we compared the following sets of observation versus null sets: movement versus RI, movement versus RII, homing versus movement, hunting versus movement, and kill sites versus hunting.
Tests for differences in habitat use within a behavioral category were performed using multinomial randomization tests. Observed numbers of locations within each habitat type were compared to 10,000 samples randomized from a multinomial distribution with probabilities (P i ) and total sample size (n) corresponding to the relevant null set (see below). The p values were obtained as the fraction of the 10,000 sets in which the null set was more extreme than the observation.
Locations were classified as being “at linear element” if the nearest point to a linear element segment was within 45 m of the location, a threshold chosen as it corresponds to the reported median error of GPS location qualities in boreal forests (Rempel et al. 1995). Significance of preference or avoidance of a linear element was determined using the G test log-likelihood ratio, which is somewhat more robust to estimates of low probabilities and zero counts than chi-squared tests (Sokal and Rohlf 1994), to compare the probability of being at a linear element in the respective observation and null set. For both habitat and linear element tests, we considered significantly higher use of an element to reflect preference, and significantly lower use to indicate avoidance. Results are reported at three levels: trend (p < 0.10), significant (p < 0.05) and highly significant (p < 0.001).
We separately compared the distribution of distances to primary roads in the movement locations to those of the RI locations to test whether the wolves avoided the primary roads also from a larger distance. We performed non-parametric comparisons of distances using Wilcoxon non-parameteric rank-sum tests.
Movement steps within each behavior were characterized by the distribution of velocities and cosines of turning angles. Positions were converted to velocities by dividing the displacement between two consecutive observations by the time interval between the observations. Only those steps with strictly 30-min intervals were used for the movement analysis to avoid bias from analyzing steps with irregular intervals. The mean cosine of turning angle \( \left\langle {\cos (\theta )} \right\rangle \) was used to measure the linear persistence of the tracks; this quantity ranges from 0, when turning angles are distributed completely randomly, to 1, when the movement is perfectly linear. We used Wilcoxon rank-sum tests tests to compare homing and hunting behaviors for both estimated mean velocities and cosines of turning angles. All analyses were performed using the R programming language (R Development Core Team 2009).
We note that, while we used a randomization approach in the analyses, an alternative would have been to estimate a set of resource selection functions (RSFs) by logistic regression or use other related approaches (e.g., Boyce and McDonald 1999; Hebblewhite et al. 2005; Fortin et al. 2005). The reason we chose the randomization approach is that it fitted naturally to the hierarchical nature of our question setting (e.g., all movements used as an observation set in the analysis where RII is the null set, whereas all movements are used as the null set in the analysis where hunting movements are the observation set). In particular, the use of randomization null sets avoids the problem of dependence among the data points when comparisons are done locally (e.g., all movements compared to RII).
Statistical analyses for the lower resolution data
From the lower resolution data on 47 wolves with no field tracking data, we selected those wolves (n = 23, 15 males and 8 females) that had at least 150 locations available between June 1 and July 31 and that displayed distinct summer home-ranging behavior, identified as the 100% minimum convex polygon (MCP) being at most 5,000 km2.
Approximately 60% of all locations for the two field-tracked wolves were den locations, bedding locations and revisited prey caches. Based on this information, we filtered the low resolution data to remove clusters, with the assumption that the bulk of the remaining points would correspond to movement positions. The filtering method consisted of calculating a kernelized utilization distribution (Gaussian kernel, bandwidth 1.5 km; Silverman 1986) of all points for each individual, removing the single location closest to the peak of the distribution, and repeating this procedure iteratively until 60% of the points were removed. This filtering procedure was validated using the data on F06 and M08 thinned to 2-h intervals, for which 95% of the non-movement locations were removed during the filtering.
Habitat preference and linear element use for the filtered low resolution data were assessed against RI null sets for each wolf. We conducted an analysis of preference and avoidance of four major landscape categories (three forest types and bogs) and presence within 45 m of a forest road and 200 m of a primary road. We tested for statistical significance at two levels: (1) separately for each wolf using randomization tests similar to those used for F06 and M08, and (2) for the aggregate of wolves using a binomial test, with the null hypothesis that the probability of preference or avoidance for any given wolf are equal. For the aggregate tests, 15 or more wolves showing either preference or avoidance was considered significant (p = 0.047), regardless of the significance level for individual wolves.
Results
Habitat preferences during movement
Both wolves were habitat generalists in the sense that no habitat type was completely excluded, though statistically significant differences to the null sets were found in many cases (Table 2). Both F06 and M08 preferred open woodland habitat, comprising 35 and 44% of their movement locations, respectively. This preference was highly significant for M08 compared both to generally available (RI) and locally available (RII) habitat, and only marginally significant for F06 (Table 2). M08 showed a general avoidance of coniferous forest and of bogs. However, F06 strongly avoided mixed forests and preferred bogs (both significant only for RI). While hunting, however, wolves showed a weak preference for bogs, and a significant avoidance when homing. Both wolves avoided mixed forests while hunting compared to their overall movement patterns. Open woodlands were even more preferred while homing, while bogs were avoided (Table 2).
Both wolves used forest roads, rivers, railways, and power lines more than expected by random, with M08 having significant preferences for all of these elements, both against RI and RII, and F06 showing significant preference for forest roads and railways. Preference for following forest roads was especially strong, with >10% of movement locations on forest roads, roughly twice more often than expected in either randomization (Table 2). M08’s use of forest roads was most pronounced while homing, while F06 showed marginal avoidance of forest roads while homing, but a significantly preference for using both while homing and while hunting.
Movements occurred significantly more frequently than expected at bog edges for both wolves. F06 further showed a significant preference for forest edges, while M08 avoided lake edges. However, M08 showed a strong preference for forest edges while hunting, while F06 showed a strong preference for bog edges.
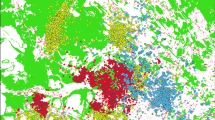
M08’s territory was marked by a greater amount of primary roads than F06’s (Fig. 4): the median distances to the nearest road (RI) were 1.33 km [interquartile range (IQR) 0.61–2.43] for M08 and 2.34 km (IQR 1.09–4.25) for F06. No location in M08’s range was more than 5.6 km away from a road, while the maximum possible distance for F06 was 9.3 km. Movement locations of both wolves were significantly further away from primary roads than the RI null set, with median distances of 1.86 km (IQR 0.91–2.89) and 3.45 km (IQR 1.94–5.37), respectively (M08: Wilcox test U = 4.49 × 105, n = 878, p < 0.001; F06: U = 3.19 × 105, n = 724, p < 0.001). Both wolves’ dens were located 2.5 and 5.6 km away from the nearest road for M08 and F06, respectively, well above the 75% quartile.

GPS positions (dots) and tracks (thin gray lines) of F06 and M08, including paved roads (thick lines) and the reindeer fence (thick dashed gray line). Locations classified as being at the roads (within 45 m) are denoted with the large shaded circles
Prey composition and kill sites
Prey composition differed between the two wolves (Table 3). We identified 40 animals killed by F06 and 50 animals killed by M08, leading to average kill rates of 0.67 and 0.83 animals per pack per day, respectively. Of F06’s 40 kills, 25 were wild forest reindeer calves (62.5%), 13 (32.5%) were moose calves and 1 was an adult moose. M08’s diet was more diverse, including moose (16 adults and 12 calves), semi-domesticated reindeer (2 adults and 13 calves), wild forest reindeer (2 adults and 1 calf) and 4 hares (Lepus timidus). Based on estimates of edible biomass for adult and calf reindeer and moose and consumption rates (Sand et al. 2008; Kojola, unpublished data), the estimated total amount of meat consumed was 930 kg for F06’s pack and 3,294 kg for M08’s pack, leading to estimated consumption rates of 3.20 and 4.98 kg animal−1 day−1, respectively.
There were few statistically significant differences between hunting movements and killing behavior. F06 prefered bogs while hunting, using them 17% of the time, but only 7.5% of kill sites were located in bogs (Table 2). On the other hand, a significantly higher proportion of F06’s kills (45%) occurred at forest edges than hunting movements (33%), which were, hierarchically, more frequent than all movements (30%), locally available habitat (28%) and all available habitat (26.6%). F06 also killed somewhat more frequently on lake edges. M08 used rivers during hunting 27% of the time, but only 14% of kill sites were found near rivers. For both wolves, kill sites occurred less frequently at forest roads (only 5 out of 90 kills) than hunting movements, but these differences were not statistically significant.
Movement parameters
The median estimated movement speed was ca. 1.7 km h−1, with no difference between the two wolves (ANOVA p = 0.84). The maximal movement speed that was measured for at least 2 h was 6.25 km h−1. F06’s mean velocity was twice as high while homing than while hunting (t test p < 0.001), whereas no differences were detected for M08 (Table 4). The homing movements for F06 were much more directed than hunting movements (p < 0.001), while there were no significant differences between the net clustering of M08’s turning angles between homing or hunting movements (p = 0.975) (Table 4).
Time budgets
Time budgets, defined as proportion of time spent per behavioral state, differed between the wolves. F06 spent more time at the den site than M08 (50.5 and 41.5%, respectively, chi-squared test p < 0.001), while M08 spent twice as much time resting away from the den site than F06 (18 and 9.6% respectively, p < 0.001). Time spent at prey did not vary between the wolves. The duration of time spent hunting was higher for F06 than M08 (12 and 6.5% respectively, p < 0.001), while F06 spent somewhat less time homing (10.6% compared to 8.7%, respectively, p = 0.02).
Testing the generality of results with lower resolution data
After filtering, home range datasets for each of the lower resolution wolves included a mean of 100.5 (SD 17.8, n = 23) data points. All wolves avoided the coniferous forest habitat compared to RI (Table 5), for 14 of these individual preference was statistically significant. In total, 23% of the habitat area for all the wolf territories was comprised of coniferous forest, whereas only 14.5% of the wolf locations were located in this habitat type. Twenty of the 23 wolves preferred mixed forests (p < 0.001); 7 of these showed significant individual preference compared to RI. Eighteen of the wolves preferred the open woodlands (p < 0.05) with 8 showing statistically significant individual preference.
There were a few discrepancies between the coarse and detailed analyses of F06 and M08 (Tables 2, 5). For example, F06’s positions showed a slight preference for coniferous forests compared to RI in the detailed analysis, whereas the automatically filtered position data showed a slight avoidance.
We tested for avoidance of primary roads by comparing the probability of a location and RI being within 200 m of a primary road (Table 5). For all but one of the wolves, the median distance from roads was greater than for RI (binomial p < 0.001); 12 or these were individually significant. The wolf that preferred the primary roads had nearly twice as many locations within 200 m than RI. This wolf resided in the extreme southwestern territory (Fig. 1).
Preferences for forest road use during movement were tested by comparing the probability of a location being within 45 m of a forest road with RI. Fifteen of the 23 wolves displayed greater preference for forest roads than in RI (p < 0.05). Six of these 15 wolves showed an individually significant preference, and only 1 wolf was significantly less likely to be on a forest road compared to RI.
An analysis of the preference and avoidance patterns with respect to latitude, longitude and sex revealed no significant effects.
Discussion
The success of wolves in fragmented and human-impacted environments worldwide can be attributed to their adaptability and use of a wide variety of habitats (Mech 1970; Ciucci et al. 2003). The wolves in this study could all be considered habitat generalists in that all available habitats were used to some extent. Nonetheless, at the scale of the summer territory and the even finer scale of local movements, patterns of preference and avoidance were clearly detectable among the closely tracked wolves, and many of these patterns were shared among all the collared wolves. In all cases, these patterns of habitat use were consistent with the high level of adaptability and the efficient use of territory that is commonly attributed to wolves.
The most important large-scale human modification of boreal habitat is the fragmentation of contiguous forests into a patchwork of clear cuts, transitional woodlands and mature stands. Almost all the wolves in this study showed a preference for the open woodland habitat and avoidance of coniferous forests. Furthermore, a large proportion of the hunting movements and kill sites of the tracked wolves were located at the edge of an open woodland habitat, indicating that the high fragmentation of the boreal forest is, at least locally, selected for by the wolves for hunting. While this might be explained in part by facility of movement across more open landscapes, it is also a likely reflection of prey preferences and habitat use. In particular, moose browse preferentially in regenerating clear cuts and in open, homogeneous stands, and their optimal habitat and carrying capacity has increased dramatically (Edenius et al. 2002).
The fact that there were, in general, few differences between hunting behaviors and the kill sites provides some weak evidence that the hunting habitat preferences primarily reflect locations of prey occurrence rather that areas where prey are more vulnerable. However, resolving the extent to which forest edges and open woodlands are associated with higher densities or higher vulnerabilities of ungulate prey remains an open question that requires more detailed study of prey habitat preferences.
In comparable European forests which have not been as modified as those in Finland (e.g., the Białowieża Primeval Forest in Poland) researchers have not reported any preferences for particular types of forest habitat (Jędrzejewska and Jędrzejewski 1998; Jędrzejewski et al. 2004). This may be explained by the larger diversity of prey items, including red deer (Cervus elaphus), roe deer (Capreolus capreolus), wild boar (Sus scrofa), European bison carcasses (Bison bonasus) and some livestock for wolves in Białowieża (Jedrzejewski et al. 2002). A greater variety of prey would result in an even more generalist habitat use than in the more fragmented boreal forests with a limited selection of ungulate prey as in our study.
A further direct human derived landscape impact is the introduction of linear elements, including more highly trafficked primary roads and associated settlements, an intensive network of less frequently used secondary roads constructed primarily for forestry operations, more sparse railways and power lines, and barriers such as the reindeer fence. Avoidance of primary roads was a response shared by nearly all the wolves in our study and was similar to that reported in other areas (Fritts 2003; Ciucci et al. 2003; Whittington et al. 2004, 2005; Kaartinen et al. 2005; Jędrzejewski et al. 2008). Primary roads represent possible risk of human-caused mortality and an indication of settlements or farms. This strong avoidance is vividly demonstrated by F06’s nearly uniform use of the space within her territory, with the exception of a wide swath of avoidance of the three terminal east–west oriented roads on the western end of the territory. Primary roads were followed very rarely, and there are a limited number of specific preferred crossing points. In contrast, both wolves occasionally followed the railway lines and power lines, which are minimally used by humans, when moving through their territories.
Most of the studies citing avoidance of roads do not distinguish between road types (though see Eriksen et al. 2009). It is important to note that many of the wolves in Finland displayed a preference for forest roads, including a highly significant preference for both field-tracked wolves. Forest roads are ubiquitous in most Finnish landscapes and offer open corridors with minimal traffic disturbance and physical obstacles. There were, in contrast, very few kills at anthropogenic linear elements, suggesting that they are specifically used as movement corridors, rather than attractors for prey.
While the broad patterns of habitat use were consistent between many of the wolves in our study, there were considerable differences in movement patterns, activity budgets and prey selection for the two field-tracked wolves, despite the similarity and proximity of their territories. F06’s summer home range was virtually free of primary roads, railways, and power lines. The den was situated as far as possible from any of these larger linear elements, allowing F06 to forage freely in any direction from the den, in contrast to M08 whose territory was transected by a network of large roads and the reindeer fence. While average velocities were consistent with speeds reported elsewhere for wolves (Musiani et al. 1998), homing movements were much more rapid and directed for F06 than any movements for M08, whose use of space was largely shaped by the network of primary roads as well as the tendency to traverse the reindeer fence and primary roads at specific locations. Other observations of habitat use differences are consistent with the assertion that F06’s habitat was less impacted than M08’s. For example, F06 was much more likely to use rivers while hunting and homing and had a weaker preference for forest roads. Though there did appear to be a significant impact of primary roads on the freedom of movement of M08, the pack was very successful, obtaining a higher daily edible biomass per wolf and successfully rearing eight pups. The diet of M08 was also importantly supplemented by semi-domesticated reindeer, a possibly more naïve and susceptible prey than the moose and wild forest reindeer. Thus, whatever the disadvantages of a habitat with a higher density of primary roads and the reindeer fence, these were readily compensated for by the advantages: a forest road network to facilitate movement, a high density of moose, and the availability of semi-domesticated reindeer.
A confounding factor in any comparison of the two wolves is that one wolf was a male from a larger pack and the other one a female from a smaller pack. Other studies have found significant differences in sex-specific movement rates. In Poland, breeding females in June–August moved on average 19–20 km day−1 compared to 27.6 km day−1 for males (Jędrzejewski et al. 2001), and it has been suggested that females spend significantly more time in their dens because other wolves in the pack provide food (Theuerkauf et al. 2003). In contrast, we did not note a dramatic difference between the time the male and the female spent hunting or away from the den: F06 spent a comparable amount of time hunting and moving through the territory and was present at a comparable number of kill sites as M08. This might be explained by the fact that F06’s pack was smaller, and the hunting responsibility was necessarily shared by more members of the pack. Alternatively, the larger and more limited selection of prey species in Finland may necessarily require greater participation from all pack members, regardless of pack size. Clearly, our sample size did not allow us to tease apart these hypotheses, nor did our methodology of summer tracking allow us to determine the extent to which individual wolves represented movements of the entire pack. However, we note that no difference between sexes with respect to any habitat preferences emerged from our analysis of wolves from across Finland.
The prey composition of the two wolves was also contrasted, with the kills found on M08’s track more variable in terms of the prey species. Notably, M08 was the only wolf in this study where the territory overlapped partially with the semi-domesticated reindeer husbandry zone, explaining the presence of semi-domesticated reindeer in the diet, and far fewer wild forest reindeer than for F06. The difference in wild forest reindeer predation might be a result of an active preference for potentially more naïve semi-domesticated reindeer or a reflection of differences in the relative prey densities. M08 also consumed a larger number of adult animals of all species while F06’s prey consisted almost entirely of calves. The winter concentration of moose in M08’s territory, especially the portion within the reindeer husbandry area, has been reported to be among the highest in the region (Siira et al. 2009). The estimated biomass consumed by M08’s pack was three times larger than F06’s pack. Again, both the quantity and age composition of the prey can be explained in part by differences in pack size, with M08’s larger pack size making the capture of larger prey feasible. The estimated consumption of meat for both packs (3–5 kg individual−1 day−1) falls within norms reported elsewhere (Głowaciński and Profus 1997; Peterson and Ciucci 2003). The rates reported here are also consistent with the summer predation rates reported by Sand et al. (2008) in Sweden and Norway, who also observed a high proportion of juvenile ungulates in the diets of smaller packs, and a higher proportion of moose and adult animals consumed by larger packs.
It is worth noting that the habitat preferences of the two wolves did not reflect the observed differences in prey composition. Kill sites for both subspecies of reindeer and moose were distributed similarly between forest, open woodland, bogs, and habitat edges. This suggests that it is would be difficult to use only telemetry and remotely sensed data to infer prey composition of wolves in boreal habitats.
Our study confirms that wolves are highly adaptable generalist predators that use their available landscape efficiently in order to capture prey, avoid humans and maintain territory (Peterson and Ciucci 2003). In Finnish boreal forests, wolves have adapted behaviorally to successfully exploit an environment humans have modified in ways which are both beneficial (high moose densities, increased areas of open woodland, linear corridors to facilitate movement) and detrimental (primary roads, settlements, and other barriers) to wolves. These observations lay the groundwork for exploring ecological questions and management concerns related to the effect of wolf presence on the ungulate and forest communities, whether by direct predation pressure or behaviorally mediated trophic cascades (Fortin et al. 2005).
References
Bergman E, Garrott R, Creel S, Borkowski J, Jaffe R, Watson F (2006) Assessment of prey vulnerability through analysis of wolf movements and kill sites. Ecol Appl 16:273–284
Bisi J, Kurki S, Svensberg M, Liukkonen T (2007) Human dimensions of wolf (Canis lupus) conflicts in Finland. Eur J Wildl Res 53:304–314
Boitani L (2003) Wolf conservation and recovery. In: Mech LD, Boitani L (eds) Wolves: behaviour, ecology and conservation. University of Chigaco Press, Chicago, pp 317–340
Boyce M, McDonald L (1999) Relating populations to habitats using resource selection functions. Trends Ecol Evol 14:268–272
Büttner G, Feranec J, Jaffrain G, Mari L, Maucha G, Soukup T (2004) The CORINE land cover 2000 project. EARSeL eProc 3:331–346
Ciucci P, Boitani L, Francisci F, Andreoli G (1997) Home range, activity and movements of a wolf pack in central Italy. J Zool 243:803–819
Ciucci P, Masi M, Boitani L (2003) Winter habitat and travel route selection by wolves in the northern Apennines, Italy. Ecography 26:223–235
Edenius L, Bergman M, Ericsson G, Danell K (2002) The role of moose as a disturbance factor in managed boreal forests. Silva Fenn 36:57–67
Eriksen A, Wabakken P, Zimmermann B, Andreassen H, Arnemo J, Gundersen H, Milner J, Liberg O, Linnell J, Pedersen H, Sand H, Solberg E, Storass T (2009) Encounter frequencies between GPS-collared wolves (Canis lupus) and moose (Alces alces) in a Scandinavian wolf territory. Ecol Res 24:547–557
Fortin D, Beyer H, Boyce M, Smith D, Duchesne T, Mao J (2005) Wolves influence elk movements: behavior shapes a trophic cascade in Yellowstone National Park. Ecology 86:1320–1330
Fritts SH (2003) Wolves and humans. In: Mech LD, Boitani L (eds) Wolves: behaviour, ecology and conservation. University of Chigaco Press, Chicago, pp 279–316
Gade-Jørgensen I, Stagegaard R (2000) Diet composition of wolves Canis lupus in east-central Finland. Acta Theriol 45:537–547
Głowaciński Z, Profus P (1997) Potential impact of wolves Canis lupus on prey populations in eastern Poland. Biol Conserv 80:99–106
Hebblewhite M, Merrill E, McDonald T (2005) Spatial decomposition of predation risk using resource selection functions: an example in a wolf–elk predator–prey system. Oikos 111:101–111
Jalanka HH, Roeken BO (1990) The use of medetomine, medetomine–ketamine combinations, and atipamezole in nondomestic mammals: a review. J Zoo Wildl Med 21:259–282
Jędrzejewska B, Jędrzejewski W (1998) Predation in vertebrate communities: the Białowieża primeval forest as a case study. Springer, Berlin
Jędrzejewski W, Schmidt K, Theuerkauf J, Jędrzejewska B, Okarma H (2001) Daily movements and territory use by radio-collared wolves (Canis lupus) in Białowieża Primeval forest in Poland. Can J Zool 79:1993–2004
Jędrzejewski W, Schmidt K, Theuerkauf J, Jędrzejewska B, Selva N, Zub K, Szymura L (2002) Kill rates and predation by wolves on ungulate populations in Białowieża Primeval forest (Poland). Ecology 83:1341–1356
Jędrzejewski W, Niedziałkowska M, Nowak S, Jędrzejewska B (2004) Habitat variables associated with wolf (Canis lupus) distribution and abundance in northern Poland. Divers Distrib 10:225–233
Jędrzejewski W, Jędrzejewska B, Zawadzka B, Borowik T, Nowak S, Mysłajek RW (2008) Habitat suitability model for Polish wolves based on long-term national census. Anim Conserv 11:377–390
Kaartinen S, Kojola I, Colpaert A (2005) Finnish wolves avoid roads and settlements. Ann Zool Fenn 42:523–532
Karlsson J, Brøseth H, Sand H, Andrén H (2007) Predicting occurrence of wolf territories in Scandinavia. J Zool 272:276–283
Kojola I, Aspi J, Hakala A, Heikkinen S, Ilmoni C, Ronkainen S (2006) Dispersal in an expanding wolf population in Finland. J Mamm 87:281–286
Kojola I, Huitu O, Toppinen K, Heikura K, Heikkinen S, Ronkainen S (2004) Predation on European wild forest reindeer (Rangifer tarandus) by wolves (Canis lupus) in Finland. J Zool 263:229–235
Kojola I, Tuomivaara J, Heikkinen S, Heikura K, Kilpeläinen K, Paasivaara A, Ruusila V (2009) European wild forest reindeer and wolves: endangered prey and predators. Ann Zool Fenn 46:416–422
Löfman S, Kouki J (2003) Scale and dynamics of a transforming forest landscape. For Ecol Manag 175:247–252
Mech LD (1970) The Wolf: the ecology and behavior of an endangered species. University of Minnesota Press, Minneapolis
Mech LD, Boitani L (2003) Wolf social ecology. In: Mech LD, Boitani L (eds) Wolves: behaviour ecology and conservation. University of Chicago Press, Chicago, pp 1–34
Musiani M, Okarma H, Jędrzejewski W (1998) Speed and actual distances travelled by radiocollared wolves in Białowieza Primeval forest (Poland). Acta Theriol 43:409–416
Peterson RO, Ciucci P (2003) The wolf as a carnivore. In: Mech LD, Boitani L (eds) Wolves: behaviour ecology and conservation. University of Chicago Press, Chicago, pp 104–130
Pullianen E (1993) The wolf in Finland. In: Promberger C, Schröder E (eds) Wolves in Europe: status and perspectives. Munich Wildlife Society, Germany, pp 14–20
R Development Core Team (2009) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna. ISBN: 3-900051-07-0
Rempel R, Rodgers AR, Abraham KF (1995) Performance of a GPS animal location system under boreal forest canopy. J Wildl Manag 59:543–551
Sand H, Wikenros C, Wabakken P, Liberg O (2006) Effects of hunting group size snow depth and age on the success of wolves hunting moose. Anim Behav 72:781–789
Sand H, Wabakken P, Zimmerman B, Johansson Ö, Pederson H, Liberg O (2008) Summer kill rates and predation pattern in a wolf–moose system: can we rely on winter estimates? Oecologia 156:53–64
Siira A, Keränen J, Heikkinen S (2009) The winter ranges of deer animals in Kainuu 1982–2008. Technical report, Riista-ja kalatalous–Selvityksia (Finnish Game and Fisheries Research Institute, in Finnish with English abstract)
Silverman BW (1986) Density estimation for statistics and data analysis. Chapman and Hall, London
Sokal RR, Rohlf FJ (1994) Biometry: the principles and practice of statistics in biological research, 3rd edn. Freeman, New York
Theuerkauf J, Jędrzejewski W, Schmidt K, Okarma H, Ruczyński I, Śnieżko S, Gula R (2003) Daily patterns and duration of wolf activity in the Białowieża forest, Poland. J Mamm 84:243–253
Whittington J, St Clair CC, Mercer G (2004) Path tortuosity and the permeability of roads and trails to wolf movement. Ecol Soc 9:4–19
Whittington J, St Clair CC, Mercer G (2005) Spatial responses of wolves to roads and trails in mountain valleys. Ecol Appl 51:543–553
Acknowledgments
The authors would like to thank A. Hakala, M. Kaakko, L. Kartano, S. Kauppinen, S. Kokko, L. Korhonen, K. Moisio, R. Ovaskainen, S. Ronkainen, M. Suominen, M. Tikkunen and M. Valtonen for invaluable assistance in the field, including capture and ground tracking. H. Kujala, K. Laidre, J. Lehtomäki and E. Meyke helped with GIS data processing. K. Laidre, B. Van Moorter and an anonymous reviewer provided helpful comments on the manuscript. This study was supported by the European Research Council (ERC Starting Grant no. 205905 to O.O.) and the Academy of Finland (Grant no. 124242 to O.O.).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Jörg Ganzhorn.
Rights and permissions
About this article
Cite this article
Gurarie, E., Suutarinen, J., Kojola, I. et al. Summer movements, predation and habitat use of wolves in human modified boreal forests. Oecologia 165, 891–903 (2011). https://doi.org/10.1007/s00442-010-1883-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00442-010-1883-y