Abstract
Are animals usually hungry and busily looking for food, or do they often meet their energetic and other needs in the 24 h of a day? Focusing on carnivores, I provide evidence for the latter scenario. I develop a model that predicts the minimum food abundance at which a carnivore reaches satiation and is released from time constraints. Literature data from five invertebrate and vertebrate species suggest that food abundances experienced in the field often exceed this threshold. A comparison of energetic demands to kill rates also suggests that carnivores often reach satiation: for the 16 bird and mammal species analyzed, this frequency is 88% (average across species). Because pressure of time would likely lead to trade-offs in time allocation and thus to a nonsatiating food consumption, these results suggest that carnivores are often released from time constraints.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Animals acquire energy by foraging, i.e. searching for food and handling it, yet they spend surprisingly little time in this activity (Herbers 1981; Bunnell and Harestad 1990). Jeschke et al. (2002) offered a proximate explanation for this pattern. Their review of empirical data indicated that most animals need less time for handling, i.e. capturing and eating, one food item than for digesting it (see also van Gils and Piersma 2004; Karasov and McWilliams 2005). Since digestion is a passive process, it does not prevent animals from foraging. However, digestion influences gut fullness and thus feelings of hunger and satiation. In this way, digestion influences the motivation to forage. Under good environmental conditions, e.g. high food abundance, one can therefore expect that the digestion time of an animal limits its foraging time: a slow digestion leads to a full gut and thus to satiation, so the animal is not motivated or able to spend more time foraging. This is a proximate explanation for the limited foraging times that animals show.
From an evolutionary perspective, one may wonder why animals do not simply digest their meals faster. With his principle of stringency, Wilson (1975) offered an answer to this question (see also Jeschke and Tollrian 2005a): “Time-energy budgets evolve so as to fit to the times of greatest stringency,” such as periods of low food abundance (e.g. severe winters), large food requirements (e.g. rearing of offspring), or greatest alternative demands (e.g. reproductive activities). The principle relies on the assumption that the fittest animals are those whose traits fit to the times of greatest stringency, especially traits that determine their time budgets. One of these traits is digestion time which is, in turn, determined by gut capacity and retention time. If these traits have evolved so as to fit to the times of greatest stringency, they do not necessarily fit to other times. For example, gut capacity should be small during periods of low food abundance because a large gut is energetically demanding and cannot be filled as food is hard to find. During periods of high food abundance, however, food is easy to find and gut capacity should hence be larger. Similarly, gut capacity should be small during periods of low energetic requirements and large during periods of high energetic requirements. It would be optimal for animals to have a phenotypically highly flexible gut, but most guts cannot adjust to environmental conditions and energetic requirements as greatly and as rapidly as these conditions and requirements vary (see next paragraph). If the capacity of such a gut has, for example, evolved so as to fit to periods of low food abundance, it will be “too small” beyond these periods. Accordingly, animals will experience time constraints during but not beyond periods of low food abundance.
Although animal guts are flexible, sometimes extremely as in pythons (Starck and Beese 2001), this flexibility does not usually match the temporal variation in environmental conditions and energetic requirements. According to a review by Karasov and McWilliams (2005), migrating birds are able to double the size of their gut within a week. Red knots (Calidris canutus) can increase their gizzard’s size by about 0.2–0.5 g/day, so need about 8–20 days for an increase to 8 from 4 g (van Gils et al. 2005b). In spite of this high flexibility, red knots often face digestive constraints (van Gils and Piersma 2004; van Gils et al. 2005a, b). Coming back to the general case, many vertebrates can increase their gut’s size by 20–40% within days and by roughly 100% in the long term (Piersma and Drent 2003; Karasov and McWilliams 2005). Food abundances and energetic requirements, however, can show a much higher variation (NERC Centre for Population Biology, Imperial College 1999). As argued above, this imperfect match of dynamics in gut size and dynamics in food abundance and requirements should often lead to “laziness.”
There are other studies that consider the absence of time constraints, but traditional foraging theory assumes constant pressure of time (reviewed by Stephens and Krebs 1986; Jeschke and Tollrian 2005a; Whelan and Brown 2005; Jeschke et al. 2006), a view that is still shared by many ecologists today (Gerber et al. 2004; Catania and Remple 2005; Yamamuchi and Yamamura 2005). Overviews of these two opposing schools of thought, physiological ecology versus foraging theory, have been given by Whelan and Brown (2005) and Whelan and Schmidt (2006).
The current study is based on Jeschke and Tollrian (2005a), who analyzed data from 19 herbivorous species and showed that these consumers usually reach satiation in the field, suggesting that they are often released from time constraints. However, an alternative explanation is possible: when herbivores have enough time to reach satiation, they do not necessarily have enough time to choose the most desirable diet. Because herbivores are usually confronted with a high variability in the quality of their food, they seldom have problems finding food of low quality, but they might have trouble finding food of high quality. These circumstances complicate the interpretation of Jeschke and Tollrian’s (2005a) results.
By focusing on carnivores, I reduce such problems in the current study, for the quality of their food is less variable (although variation still exists, e.g. van Gils et al. 2005a, b). I develop a model that predicts the food abundance at which a consumer reaches satiation and is released from time constraints. It also predicts how much time a consumer must spend foraging to reach satiation and how much “spare time” it has depending on food abundance. Although the model is not restricted to carnivores, it is most applicable to these consumers, for it considers only one type of food, in particular it does not consider different qualities of food. The model can be extended to different food types but is only used in its basic form here. I parameterize it with carnivore data from the literature and compare published kill rates of free-ranging carnivorous birds and mammals with their energetic demands. The results suggest that carnivores frequently reach satiation and are arguably often released from time constraints.
The model
The model relates time budgets of consumers to the abundance of their food. For simplicity, the model only considers the time a consumer is potentially able to forage, e.g. daylight hours for predators of diurnal prey or for visually foraging consumers. This time is called total time here. It can be divided into foraging time t f (given as a fraction of total time; hence 0 ≤ t f ≤ 1, dimensionless) and non-foraging time t nf (given as a fraction of total time; hence 0 ≤ t nf ≤ 1, dimensionless):
According to Holling (1966), a consumer’s consumption rate is reduced by the time the consumer spends nonforaging:
where y(t f; x) is consumption rate over longer periods of time (dimension in SI units: s−1), x is food abundance (dimension in SI units: m−2 for a two-dimensional system, e.g. a terrestrial system, and m−3 for a 3D system, e.g. an aquatic system), and y f(x) is consumption rate when t f = 1. Most previous studies that explicitly stated the relationship between food uptake and foraging time follow Eq. 2, i.e. they assumed a linear relationship (Real 1977; Owen-Smith and Novellie 1982; Abrams 1984, 1990; McNamara and Houston 1994); Schmitz et al. (1998) assumed a hyperbolic relationship. These models have thus assumed a strictly monotonously increasing relationship, i.e. a trade-off between foraging and nonforaging. They thereby neglected consumer satiation: a typical consumer finds food relatively fast when it is abundant, thus having a lot of “spare time” where foraging does not make sense due to satiation (see Introduction). It may use this spare time for nonforaging activities without reducing the amount of food assimilated.
I will show that consumer satiation lets the trade-off between foraging and nonforaging activities disappear if food abundance exceeds a certain threshold. As a basic model, I use the steady-state satiation equation (SSS equation; Jeschke et al. 2002):
where β is the encounter rate between a searching consumer and a single food item (dimension in SI units: m2 s−1 for a 2D system, and m3 s−1 for a 3D system); γ is the probability that the consumer detects encountered food (dimensionless); ε is efficiency of attack (dimensionless), i.e. the proportion of successful attacks; t att is attacking time per food item (s); t eat is eating time per food item (s); t g is gut retention time (s); and g is gut capacity (dimensionless), i.e. the number of food items the gut of a satiated animal holds. In the SSS equation, the asymptotic maximum consumption rate is
More details are given in Jeschke et al. (2002, 2006). Thus, at a very high (strictly speaking: infinite) food abundance, consumption rate is either determined by the consumer’s corrected handling time b (handling-limited consumer) or by its corrected digestion time c (digestion-limited consumer). Handling-limited consumers cannot become satiated and are therefore always time constrained. Most consumers seem to be digestion-limited, however (Jeschke et al. 2002).
I now address the question: At which food abundance is a consumer released from time constraints? The question can also be formulated as: At which food abundance does nonforaging not reduce food uptake? Imagine a consumer that has to invest a given amount of time avoiding predators, lying in the shade, and reproducing. If this time spent nonforaging reduces food uptake, the consumer is time-constrained, otherwise not. Digestive pauses can alternatively be used for nonforaging activities without reducing food uptake (see Introduction). I therefore call these pauses spare time t sp (given as a fraction of total time; hence 0 ≤ t sp ≤ 1, dimensionless). Total spare time can be calculated as
Asymptotical maximum spare time for a digestion-limited consumer is
Spare time is graphically represented in Fig. 1; it is negative at low food abundances (i.e. nonforaging reduces food uptake here) and positive at high food abundances. The threshold food abundance x 0, where spare time t sp becomes positive, is
In Fig. 1, the consumer needs to spend 10% of its time nonforaging. Food abundance x determines whether this nonforaging reduces food uptake: below the threshold food abundance x 0, nonforaging fully reduces food uptake according to Eq. 2; between x 0 and x*(t nf), the consumer has some spare time to invest in nonforaging, so food uptake is only partly reduced; finally, if food abundance exceeds x*(t nf), spare time exceeds necessary nonforaging time and food uptake is consequently not reduced at all.

Consumer spare time t sp(x) as a function of food abundance x; t sp becomes positive at x 0 = 1/[a (c − b)]. In the example, the consumer invests 10% (t nf = 0.10) of its time nonforaging. For x ≤ x 0, this nonforaging fully reduces food uptake; for x 0 < x < x*(t nf), food uptake is partly reduced; and for x ≥ x*(t nf), there is no reduction in food uptake at all. Model inputs: a = 2, b = 0.02, c = 0.03
Let us now ask: When does additional foraging increase food uptake? We can address this question on the basis of our previous considerations. If x ≤ x 0, food uptake increases in proportion to foraging time t f according to Eq. 2; if x > x 0, food uptake increases in proportion to t f until it reaches its maximum where nonforaging time equals spare time, i.e. \( {t_{\text{nf}}} = t_{\text{sp}} \Leftrightarrow {t_{\text{f}}} = 1-{t_{\text{sp}}}\). These considerations can mathematically be summarized as
for t sp(x) see Eq. 5. Equation 2a is a corrected version of Eq. 2 and is depicted in Fig. 2 (cf. Weiner 2000). The consumption rate at the threshold food abundance y(t f; x 0) can now also be easily calculated. After inserting x 0 into Eq. 2a and simplifying, we get

Consumption rate y(t f; x) as a function of foraging time t f, given for different food abundances x (Eq. 2a). Up to the threshold density x 0 [= 1/(a(c − b)), Eq. 7; here: x 0 = 50], y is proportional to t f, and Eq. 2a equals Eq. 2. Above x 0, y is still proportional to t f if t f < 1 − t sp(x) [for spare time t sp(x), see Eq. 5]. In case of x > x 0 and t f ≥ 1 − t sp(x), y cannot be further increased by investing more time in foraging, so it remains constant. Model inputs: a = 2, b = 0.02, c = 0.03
Model parameterizations
Methods
I parameterized the model with data from the literature in order to estimate values for the threshold prey density x 0, i.e. the density at which a predator is beginning to become satiated and released from time constraints. I then compared the estimates for x 0 with prey densities measured in the field. To calculate x 0, values are needed for the parameters success rate a, handling time b, and digestion time c (see Eq. 7). If available, I used measurements of subparameters that could be directly transferred to values of a, b, and c. If the values for a and/or c could not be calculated in this way, I estimated them by fitting a functional response equation with a nonlinear regression model to the functional response of the focal predator. (The functional response of a predator is the number of prey items it consumes per time period as a function of prey density). This is only possible if the functional response is of type II (Holling 1959; Jeschke et al. 2004). For estimating c, I only used long-term responses because only these include predator satiation effects. Handling times b were only estimated on the basis of direct measurements of subparameters, not by using functional responses, for it is usually impossible to extract reliable estimates of b from functional response curves (Fox and Murdoch 1978; Abrams 1990; Caldow and Furness 2001; Jeschke et al. 2002; Jeschke and Tollrian 2005b). I analyzed all species for which I had the necessary data available except for wading birds where data for several species were available. To prevent a taxonomic bias, I included only one arbitrarily chosen wader in my analysis.
Results
The results of the model parameterizations suggest that natural prey densities can be sufficiently high to allow predator satiation and release from time constraints (Table 1). The frequency of such densities experienced by predators is currently unclear, however, due to lacking data.
Kill rates
Methods
Another approach to estimate how often carnivores are satiated or released from time constraints is to compare their field kill rates with their energetic demands. For this approach, the following data are needed: FR, a functional response of the carnivore measured in the field; DIET, the relationship between the relative frequency of the prey species in the diet of the predator (related to biomass) and prey density; M, the average body mass of a prey individual; and FMR, the average field metabolic rate of a carnivore individual. I used these data as follows:
-
1.
Each data point of the field functional response (FR) gave the number of prey individuals killed per carnivore in a certain time period. I used this number together with DIET and M in order to calculate the kill rate (KR) in grams of prey per carnivore per day.
-
2.
To calculate the demand in grams of prey per carnivore per day, I first estimated energetic demand E demand (cf. Willmer et al. 2000) as
$$ E_{{{\text{demand}}}} = {\text{(FMR}} + E_{{\text{p}}} {\text{)}}/{\text{AE}} = {\text{FMR}}\,{\text{(1}} + {\text{PE)}}/{\text{AE}} = {\text{1}}{\text{.18 FMR}}\,{\text{(1}} + {\text{PE),}} $$(9)where E p is energy invested in production (growth or reproduction), PE (=E p/FMR) is production efficiency (dimensionless; see Humphreys 1979 for quantitative values), and AE is assimilation efficiency, which is about 0.85 for carnivores on average (Willmer et al. 2000). I then divided E demand (kJ/day) by 7 in order to calculate DEMAND (g/day) (the energy content of animals is according to Peters 1983 on average about 7 kJ/g-wet mass). The complete formula for DEMAND is thus
$$ {\text{DEMAND in g}}/{\text{day}} = 0.169\,{\text{FMR in kJ}}/{\text{day }}({\text{1}} + {\text{PE}}){\text{.}} $$(10)In order to account for estimation errors, values for DEMAND are reported as ranges, calculated as estimated mean values ±10%.
-
3.
Finally, I compared KR with DEMAND.
In applying this method, one has to be aware of tautology. For example, studies on birds of prey often report field functional responses that were not actually measured but calculated from the birds’ diets by assuming that the kill rates equaled the birds’ demands (Korpimäki and Norrdahl 1991; Nielsen 1999; Salamolard et al. 2000). Similarly, some studies used doubly labeled water to estimate an animal’s demand and used this value, in turn, to estimate its kill rate (e.g. Feltham and Davies 1996). Kill rates obtained in either of these ways were not used here.
Results
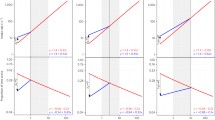
I found the needed data for this analysis only for birds and mammals. For these two groups, I analyzed a representative sample of 16 species (electronic supplementary material; Fig. 3). Kill rates usually met or exceeded energetic demands in these species. For example, in only 1 (3%) out of the 38 reported cases did environmental conditions not allow wolves (Canis lupus) to meet their demands. This was, however, not always the case; in two out of two cases, conditions did not allow Arctic skuas (Stercorarius parasiticus) to meet their demands. Taking all species together, environmental conditions did not allow demands to be met in 12 ± 6.3% of the cases (mean ± SE, N = 16). Of the 88% where demands were met, kill rates were within the range of estimated demands (±10%) in 27 ± 9.5% of the cases and exceeded demands by more than 10% in 61 ± 11.0% of the cases.

Kill rates of free-ranging carnivorous birds and mammals compared to their demands. The latter are given as ranges, calculated as estimated mean values ±10%, in order to account for estimation errors. Underlying data are given in the electronic supplementary material
Discussion
The results of the model parameterizations and the analysis of kill rates suggest that carnivores, especially birds and mammals, frequently reach satiation in the field. The results are in line with Huey et al. (2001) and Arrington et al. (2002) who showed that the average percentage of lizards and fish with empty stomachs is rather low (13 and 16%, respectively). According to Jeschke and Tollrian (2005a), herbivores also frequently reach satiation in the field. From this perspective, it is understandable why so many data points of field functional responses lie on the satiation plateau, and why field consumption rates are usually less strongly related to food abundance than lab-consumption rates (reviewed by Jeschke et al. 2004; Goss-Custard et al. 2006). In the words of Van Orsdol (1986): “The amount of food consumed by lions does not appear to correlate with prey density. The Southern Circuit in Ishasha occupied an area of high prey density, yet had a level of food intake only slightly higher than the Mweya pride. This is because prey in Ishasha are ‘superabundant’; an increase in prey density would have little or no effect on food intake.” (p. 387)
The results also arguably suggest that carnivores, at least birds and mammals, are released from time constraints on many days of their life because such constraints would likely lead to trade-offs in time allocation and thus to a nonsatiating food consumption. These results can be evolutionarily explained by Wilson’s (1975) principle of stringency, as outlined in the Introduction. A shortcoming of this principle is that it ignores energy-conserving mechanisms such as fat reserves: it ignores the fact that during periods of low stringency (high food abundance or low requirements), animals can accumulate fat reserves or store food that can be used during periods of high stringency (low food abundance or high requirements). It would be valuable to extend the theory in this direction, e.g. by way of dynamic programming models.
A possible objection to the “laziness” hypothesis is that animals reaching satiation on a given day might not be able to satisfy all of their other needs: perhaps they have enough time to fill their gut, but not to find a mate. This objection could be valid sometimes in those cases where satiation is just reached, but not when kill rate exceeds demand. Another argument against “laziness” is that animals always have to avoid their predators, so they can never be released from time constraints. This claim is valid under the condition that foraging always comes with the risk of predation. Specifically, predators must be permanently present (i.e. so close that an encounter is possible) or the animal cannot assess predator presence. Not all animals have predators, however, and those that do are not permanently in their proximity. As Sih et al. (2000) pointed out: “In spite of its near ubiquity in nature, until recently no theory has focused explicitly on the effects of temporal variation in risk on prey behavior” (but see Brown et al. 1999; Lima and Bednekoff 1999; Brown and Kotler 2004). Many, if not most, animals can also assess the presence of their predators (Caro 2005), but the accuracy of these assessments certainly varies among species. Animal behavior is often affected by predators even in their absence (Brown et al. 1999; Brown and Kotler 2004), although such “fear” does not necessarily lead to time constraints. Living in a group increases the probability of detecting predators, for many eyes see more, and reduces the amount of time that is spent being vigilant (Pulliam 1973; Bertram 1978; Elgar 1989; Beauchamp 2003; Fortin et al. 2004). Finally, looking out for predators does not necessarily distract from foraging, as, for example, chewing and being vigilant are not mutually exclusive (Fortin et al. 2004). Although more research is needed before we know how often predator avoidance leads to time constraints, it is clear that time constraints are not inevitable. Many carnivores seem to be released from them on numerous days of their life.
References
Abrams PA (1984) Foraging time optimization and interactions in food webs. Am Nat 124:80–96
Abrams PA (1990) The effects of adaptive behavior on the type-2 functional response. Ecology 71:877–885
Arrington DA, Winemiller KO, Loftus WF, Akin S (2002) How often do fishes “run on empty”? Ecology 83:2145–2151
Beauchamp G (2003) Group-size effects on vigilance: a search for mechanisms. Behav Processess 63:111–121. DOI 10.1016/s0376–6357(03)00002–0
Bertram BCR (1978) Living in groups: predators and prey. In: Krebs JR, Davies NB (eds) Behavioural ecology: an evolutionary approach. Blackwell, Oxford, pp 64–96
Brown JS, Kotler BP (2004) Hazardous duty pay and the foraging cost of predation. Ecol Lett 7:999–1014. DOI 10.1111/j.1461-0248.2004.00661.x
Brown JS, Laundré JW, Gurung M (1999) The ecology of fear: optimal foraging, game theory, and trophic interactions. J Mammal 80:385-399
Bunnell FL, Harestad AS (1990) Activity budgets and body weight in mammals: how sloppy can mammals be? Curr Mammal 2:245–305
Caldow RWG, Furness RW (2001) Does Holling’s disc equation explain the functional response of a kleptoparasite? J Anim Ecol 70:650–662. DOI 10.1046/j.1365-2656.2001.00523.x
Caro T (2005) Antipredator defenses in birds and mammals. University of Chicago Press, Chicago
Catania KC, Remple FE (2005) Asymptotic prey profitability drives star-nosed moles to the foraging speed limit. Nature 433:519-522. DOI 10.1038/nature03250
Davies J (1985) Evidence for a diurnal horizontal migration in Daphnia hyalina lacustris Sars. Hydrobiologia 120:103–105
DeBlois EM, Leggett WC (1991) Functional response and potential impact of invertebrate predators on benthic fish eggs: analysis of the Calliopius laeviusculus-capelin (Mallotus villosus) predator-prey system. Mar Ecol Prog Ser 69:205–216
Elgar MA (1989) Predator vigilance and group size in mammals and birds: a critical review of the empirical evidence. Biol Rev 64:13–33
Feltham MJ, Davies JM (1996) The daily food requirements of fish-eating birds: getting the sums right. In: Greenstreet SPR, Tasker ML (eds) Aquatic predators and their prey. Fishing News Books, Oxford, pp 53–57
Fortin D, Boyce MS, Merrill EH (2004) Multi-tasking by mammalian herbivores: overlapping processes during foraging. Ecology 85:2312–2322
Fox LR, Murdoch WW (1978) Effects of feeding history on short-term and long-term functional responses in Notonecta hoffmanni. J Anim Ecol 47:945–959
Gerber LR, Reichman OJ, Roughgarden J (2004) Food hoarding: future value in optimal foraging decisions. Ecol Model 175:77–85. DOI 10.1016/j.ecolmodel.2003.10.022
Goss-Custard JD, West AD, Yates MG, Caldow RWG, Stillman RA, Bardsley L, Castilla J, Castro M, Dierschke V, Durell SEA le V dit, Eichhorn G, Ens BJ, Exo K-M, Udayangani-Fernando PU, Ferns PN, Hockey PAR, Gill JA, Johnstone I, Kalejta-Summers B, Masero JA, Moreiro F, Nagarajan RV, Owens IPF, Pacheco C, Perez-Hurtado A, Rogers D, Scheiffarth G, Sitters H, Sutherland WJ, Triplet P, Worrall DH, Zharikov Y, Zwartz L, Pettifor RA (2006) Intake rates and the functional response in shorebirds (Charadriiformes) eating macro-invertebrates. Biol Rev 81:501–529. DOI 10.1017/s1464793106007093
Herbers J (1981) Time resources and laziness in animals. Oecologia 49:252–262
Hohberg K (2003) Soil nematode fauna of afforested mine sites: genera distribution, trophic structure and functional guilds. Appl Soil Ecol 22:113–126. DOI 10.1016/s0929–1393(02)00135-x
Holling CS (1959) The components of predation as revealed by a study of small-mammal predation of the European pine sawfly. Can Entomol 91:293–320
Holling CS (1966) The functional response of invertebrate predators to prey density. Mem Entomol Soc Can 48:1–86
Huey RB, Pianka ER, Vitt LJ (2001) How often do lizards “run on empty”? Ecology 82:1–7
Humphreys WF (1979) Production and respiration in animal populations. J Anim Ecol 48:427–453
Jeschke JM, Tollrian R (2005a) Predicting herbivore feeding times. Ethology 111:187–206. DOI10.1111/j.1439-0310.2004.01052.x
Jeschke JM, Tollrian R (2005b) Effects of predator confusion on functional responses. Oikos 111:547–555. DOI 10.1111/j.1600-0706.2005.14118.x
Jeschke JM, Kopp M, Tollrian R (2002) Predator functional responses: discriminating between handling and digesting prey. Ecol Monogr 72:95–112
Jeschke JM, Kopp M, Tollrian R (2004) Consumer-food systems: why type I functional responses are exclusive to filter feeders. Biol Rev 79:337–349. DOI 10.1017/s1464793103006286
Jeschke JM, Kopp M, Tollrian R (2006) Time and energy constraints: reply to Nolet & Klaassen (2005). Oikos 114:553–554. DOI 10.1111/j.2006.0030-1299.14975.x
Karasov WH, McWilliams SR (2005) Digestive constraints in mammalian and avian ecology. In: Starck JM, Wang T (eds) Physiological and ecological adaptations to feeding in vertebrates. Science Publishers, Enfield, pp 87–112
Korpimäki E, Norrdahl K (1991) Numerical and functional responses of kestrels, short-eared owls, and long-eared owls to vole densities. Ecology 72:814–826
Kvam OV, Kleiven OT (1995) Diel horizontal migration and swarm formation in Daphnia in response to Chaoborus. Hydrobiologia 307:177–184. DOI 10.1007/bf00032010
Lima SL, Bednekoff PA (1999) Temporal variation in danger drives antipredator behavior: the predation risk allocation hypothesis. Am Nat 153:649-659
Malone BJ, McQueen DJ (1983) Horizontal patchiness in zooplankton populations in two Ontario kettle lakes. Hydrobiologia 99:101–124
McNamara JM, Houston AI (1994) The effect of a change in foraging options on intake rate and predation rate. Am Nat 144:978–1000
NERC Centre for Population Biology, Imperial College (1999) The global population dynamics database.http://www.sw.ic.ac.uk/cpb/cpb/gpdd.html
Nielsen OK (1999) Gyrfalcon predation on ptarmigan: numerical and functional responses. J Anim Ecol 68:1034–1050. DOI 10.1046/j.1365-2656.1999.00351.x
Owen-Smith N, Novellie P (1982) What should a clever ungulate eat? Am Nat 119:151–178
Peters RH (1983) The ecological implications of body size. Cambridge University Press, Cambridge
Piersma T, Drent J (2003) Phenotypic flexibility and the evolution of organismal design. Trends Ecol Evol 18:228–233. DOI 10.1016/s0169-5347(03)00036-3
Pulliam HR (1973) On the advantages of flocking. J Theor Biol 38:419–422
Real LA (1977) The kinetics of functional response. Am Nat 111:289–300
Salamolard M, Butet A, Leroux A, Bretagnolle V (2000) Responses of an avian predator to variations in prey density at a temperate latitude. Ecology 81:2428–2441
Schmitz OJ, Cohon JL, Rothley KD, Beckerman AP (1998) Reconciling variability and optimal behaviour using multiple criteria in optimization models. Evol Ecol 12:73–94. DOI 10.1023/a:1006559007590
Sih A, Ziemba R, Harding KC (2000) New insights on how temporal variation in predation risk shapes prey behavior. Trends Ecol Evol 15:3–4. DOI 10.1016/s0169-5347(99)01766-8
Starck JM, Beese K (2001) Structural flexibility of the intestine of Burmese python in response to feeding. J Exp Biol 204:325–335
Stephens DW, Krebs JR (1986) Foraging theory. Princeton University Press, Princeton
van Gils JA, Piersma T (2004) Digestively constrained predators evade the cost of interference competition. J Anim Ecol 73:386–398. DOI 10.1111/j.0021-8790.2004.00812.x
van Gils JA, de Rooij SR, van Belle J, van der Meer J, Dekinga A, Piersma T, Drent R (2005a) Digestive bottleneck affects foraging decisions in red knots Calidris canutus. I. Prey choice. J Anim Ecol 74:105–119. DOI 10.1111/j.1365-2656.2004.00903.x
van Gils JA, Dekinga A, Spaans B, Vahl WK, Piersma T (2005b) Digestive bottleneck affects foraging decisions in red knots Calidris canutus. II. Patch choice and length of working day. J Anim Ecol 74:120–130. DOI 10.1111/j.1365-2656.2004.00904.x
Van Orsdol KG (1986) Feeding behaviour and food intake of lions in Rwenzori National Park, Uganda. In: Miller SD, Everitt DD (eds) Cats of the world: biology, conservation and management. National Wildlife Federation, Washington, pp 377–388
Weiner J (2000) Activity patterns and metabolism. In: Halle S, Stenseth NC (eds) Activity patterns in small mammals. Springer, Berlin, pp 49–65
Whelan CJ, Brown JS (2005) Optimal foraging and gut constraints: reconciling two schools of thought. Oikos 110:481–496. DOI 10.1111/j.0030-1299.2005.13387.x
Whelan CJ, Schmidt KA (2006) Food acquisition, processing, and digestion. In: Stephens D, Brown JS, Ydenberg R (eds) Foraging. University of Chicago Press, Chicago (in press)
Willmer P, Stone G, Johnston I (2000) Environmental physiology of animals. Blackwell, Oxford
Wilson EO (1975) Sociobiology: the new synthesis. Harvard University Press, Cambridge
Yamauchi A, Yamamura N (2005) Effects of defense evolution and diet choice on population dynamics in a one-predator-two-prey system. Ecology 86:2513–2524
Acknowledgements
I thank Carlos Martínez del Rio for discussions about foraging theory and physiological ecology. Richard Caldow is acknowledged for providing me with raw data and for comments on the manuscript. Further helpful comments came from Chris Carbone, Michael Kopp, John McNamara, Wolf Mooij, Richard Ostfeld, David Stephens, Jan van Gils, Martin Wikelski, and an anonymous reviewer.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Wolf Mooij.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article
Cite this article
Jeschke, J.M. When carnivores are “full and lazy”. Oecologia 152, 357–364 (2007). https://doi.org/10.1007/s00442-006-0654-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00442-006-0654-2