
Abstract
In 2-choice tasks, responses are faster when stimulus location corresponds to response location, even when stimulus location is irrelevant. Dolk et al. (J Exp Psychol Hum Percept Perform 39:1248–1260, 2013a) found this stimulus–response correspondence effect with a single response location in a go–nogo task when an irrelevant Japanese waving cat was present. They argued that salient objects trigger spatial coding of the response relative to that object. We examined this claim using both behavioral and lateralized readiness potential (LRP) measures. In Experiment 1 participants determined the pitch of a left- or right-positioned tone, whereas in Experiment 2 they determined the color of a dot within a centrally located hand pointing left, right, or straight ahead. In both experiments, participants performed a go–nogo task with the right-index finger and a 2-choice task with both index fingers, with a left-positioned Japanese waving cat present or absent. For the go–nogo task, the cat induced a correspondence effect on response times (RT) to the tones (Experiment 1) but not the visual stimuli (Experiment 2). For the 2-choice task, a correspondence effect was evident in all conditions in both experiments. Cat’s presence/absence did not significantly modulate the effect for right and left responses, although there was a trend toward increased RT and LRP for right responses in Experiment 1. The results imply that a salient, irrelevant object could provide a reference frame for response coding when attention is available to process it, as is likely in an auditory task (Experiment 1) but not a visual task (Experiment 2).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
It is crucial to react promptly to objects if a person is to achieve her or his goals (e.g., turning off the correct stove burner to prevent overcooking a dish). Often, people’s behaviors are affected not only by relevant features of the object on which they intend to act but also by irrelevant features (e.g., the relative location of the burner and its switch). One classic example demonstrated in laboratory settings is when participants are to respond to the color of a visual circle (e.g., red vs. green) displayed to the left or right side of a screen or the pitch of an auditory tone (e.g., high vs. low) presented via a left or right speaker. Even though stimulus location is irrelevant, participants’ keypress responses are faster and/or more accurate when the stimulus location corresponds to the response location than when it does not, a finding known as the stimulus–response correspondence effect, or Simon effect (for reviews, see e.g., Lien & Proctor, 2002; Lu & Proctor, 1995; Proctor & Vu, 2006). The correspondence effect is considered to be a result of conflict between goal-driven response activation from the relevant feature and bottom-up activation from the irrelevant feature of the stimulus (i.e., the dual-process model; De Jong, Liang, & Lauber, 1994; Kornblum, Hasbroucq, & Osman, 1990).
Prior studies of the stimulus–response correspondence effect have typically involved a single participant performing a 2-choice task. The correspondence effect is usually negligible when participants perform a go–nogo task in which they respond to one of the two target features but withhold response to the other (e.g., press the right response button in response to red stimuli but not green stimuli). The absence of correspondence effect in the go–nogo task has been attributed to a lack of uncertainty in the spatial attribute of the go response (e.g., Hommel, 1996; Shiu & Kornblum, 1999). However, some studies have observed the correspondence effect in a special version of this task, called the joint go–nogo task, in which two participants each perform a go–nogo task on complementary target features (e.g., Sebanz, Knoblich, & Prinz, 2003, 2005; Sebanz, Knoblich, Prinz, & Wascher, 2006). Whereas some researchers have favored a social interpretation of the effect and hypothesized a tendency for people to co-represent other persons’ actions (i.e., the action co-representation account; see Knoblich & Sebanz, 2006; Sebanz & Knoblich, 2009, for reviews), others have argued that any salient, spatial event, irrespective of whether it appears in a social context, could elicit the correspondence effect inasmuch as it provides a response reference (i.e., the referential coding account; see Dolk et al., 2014, for a review). Below, we briefly discuss those two different views.
Action co-representation vs. referential coding
The effect of social context on action was first demonstrated by Sebanz et al. (2003). In their Experiment 1, participants responded to the color of a ring (red vs. green) on the index finger of a hand pointing left, right or straight ahead, shown on a computer screen. The pointing direction of the index finger was irrelevant to the task. Half of the participants performed a 2-choice task (e.g., the left key for red and the right key for green), whereas the other half performed the individual go–nogo task (e.g., the right key for green and no keypress for red) and the joint go–nogo task with a partner (one participant pressed only the left key for red and the other participant pressed only the right key for green). There was no significant correspondence effect in the individual go–nogo condition (3 ms), but there was in the joint go–nogo condition (11 ms), which was just as large as that in the 2-choice condition (9 ms). The finding of similar correspondence effects for the 2-choice and joint go–nogo tasks led Sebanz et al. to conclude that people automatically co-represent the other person’s actions (the action co-representation account) when performing the task jointly with a partner, rendering the task functionally equivalent to performing a 2-choice task (see also Knoblich & Sebanz, 2006).
Sebanz et al. (2006) provided event-related potential (ERP) evidence for this view. In that study, participants performed the individual and joint go–nogo tasks used by Sebanz et al. (2003). They observed a larger P3 component, an index of response inhibition (e.g., Bokura, Yamaguchi, & Kobayashi, 2001; Roberts, Rau, Lutzenberger, & Birbaumer, 1994), in the joint condition than the individual condition. These findings suggest that an action representation from the other person in the joint condition needed to be inhibited, which was not required when the participant performed the go–nogo task alone in the individual condition (see also Tsai, Kuo, Jing, Hung, & Tzeng, 2006).
Further evidence for co-representing other people’s actions in the joint go–nogo condition was provided by Holländer, Jung, and Prinz’s (2011) ERP study. They used a precuing paradigm, in which a red or green circle precue appeared in the screen center for 1000 ms, followed by a black circle in the center until response. Participants performed the go–nogo task alone (the single condition) or the joint go–nogo task with the anatomically congruent hand as the co-actor (e.g., the participant and the co-actor responded with their left hands; the joint congruent condition) or incongruent hand (e.g., the participant responded with their left hand and the co-actor responded with their right hand; the joint incongruent condition). The precue indicated whose turn it was to respond (go vs. nogo), whereas the black circle prompted participants to initiate the response. To examine whether one generates a representation of the co-actor’s response, Holländer et al. measured the precue-locked lateralized readiness potential (LRP), which has been assumed to reflect the relative activation of action planning and response selection (e.g., De Jong, Wierda, Mulder, & Mulder, 1988; Lien, Ruthruff, Hsieh, & Yu, 2007; Masaki, Wild-Wall, Sanglas, & Sommer, 2004; Miller, Coles, & Chakraborty, 1996). They found the LRP for go trials, not nogo trials, in the single condition, but found similar LRPs for go and nogo trials in both the joint congruent and incongruent conditions. These findings, consistent with Sebanz et al. (2006), suggest that response activation occurs when one anticipates another’s actions in the context of task sharing.
Whereas the action co-representation account speaks to the ability to integrate one’s own and others’ behaviors, the social attribute that drives this account has been challenged (Dittrich, Dolk, Rothe-Wulf, Klauer, & Prinz, 2013; Dittrich, Rothe, & Klauer, 2012; Dolk et al., 2011; Dolk, Hommel, Prinz, & Liepelt, 2013a; Guagnano, Rusconia, & Umiltá, 2010; Hommel, Colzato, & van den Wildenberg, 2009; Liepelt, 2014). Dolk et al. (2013a), for instance, demonstrated that a salient, nonsocial feature in the visual field is sufficient to elicit a correspondence effect even without a co-actor. In their study, participants performed an individual go–nogo task on non-semantic auditory sounds (i.e., Dutch color words “green” and “purple” compressed and played in reverse) presented by a left or right speaker. In Experiment 1, a Japanese waving cat was placed in a fixed position to the left of the participant’s response key for 50 % of the trials (the cat-present condition) and was removed for the remaining 50 % of the trials (the cat-absent condition). Results showed a 19-ms correspondence effect in the cat-present condition but a nonsignificant 7-ms effect in the cat-absent condition. Without the cat, the participant has no reason to code their response as ‘right’ and thus no significant correspondence effect occurs. With the cat, however, the participant presumably perceives her or his response as right with respect to the left-positioned cat. Similar results were observed with a salient, irrelevant clock and a metronome that produced sound to attract attention (Experiments 2–4) but not with a silent metronome (Experiment 5). Dolk et al. concluded that active participation of a co-actor is not necessary for the go–nogo correspondence effect to occur. Rather, any external event that is salient and provides a spatial reference frame relative to which the participant codes her or his own response as left or right is sufficient to elicit a correspondence effect (the referential coding account; see also Dittrich et al., 2012, 2013; Dolk, Liepelt, Prinz, & Fiehler, 2013b; Guagnano et al., 2010; Liepelt, 2014).
Although the referential coding account can explain the presence vs. absence of the correspondence effect in the go–nogo task, it rests on an assumption that the referential code is driven by attention being attracted by the salient object. There is evidence that attention plays a critical role in processing the irrelevant object, making object reference frames available to aid spatial coding (e.g., Nicoletti & Umiltá, 1989a, b; Stoffer, 1991; but see Hommel, 1993). Note that Dolk et al. (2013a) only reported experiments with auditory tasks. Thus, it remains to be determined whether their finding can be extended to visual tasks for which limited visual attentional capacity is available to process the irrelevant object. Indeed, Dolk et al. noted that the effect with a visual task is an open question:
More research is also needed to test whether the present findings, which were obtained with an auditory version of the cSE [Donders’ (1969) “type c” go–nogo Simon effect], can be extended to visual versions. On the one hand, there is no particular reason to believe that spatial action coding is different in auditory and visual tasks, so that manipulations of the implemented objects should yield equivalent findings. On the other hand, it is possible that using auditory stimuli has left more attentional capacity to process visual aspects of implemented events and/or primed participants to process the auditory aspects of those events, which would not be the case in visual Simon tasks. Moreover, the spatial coding of visual stimuli is easier and more prevalent than the spatial coding of auditory stimuli, which might suggest that visual tasks produce stronger effects than obtained in the present study (p. 1258).
A further issue of theoretical relevance is how one coordinates spatial codes generated from external, salient objects relative to one’s own response alternatives as commonly involved in the 2-choice task for the stimulus–response correspondence effect. According to the referential coding account, the co-actor in Sebanz et al.’s (2003) study would provide a reference frame for the spatial coding of the participant’s response in the joint go–nogo task, resulting in a correspondence effect. Note that, in Sebanz et al.’s study, the effect elicited by the reference frame of the co-actor in the joint go–nogo task was similar in size to the effect elicited by the reference frame of one’s alternative responses in the 2-choice task (11 vs. 9 ms, respectively). This result seems to imply that the spatial reference frame from the external object triggers similar response activation while selecting only one response in the go–nogo task as the reference frame involved in choosing between response alternatives in the 2-choice task.
Although the irrelevant cat in Dolk et al.’s (2013a) study affords the only source for coding the response location in the go–nogo task, this reference might provide an additional source for spatial coding in the 2-choice task. Previous studies have reported results suggesting that responses can be coded with respect to multiple frames of reference that contribute jointly to the overall correspondence effect (e.g., hemispace, relative position; Hommel, 1993; Lamberts, Tavernier, & D’Ydewalle, 1992), with the net effect of correspondence depending on the amount of attention allocated to response activations triggered by those spatial codes (e.g., Yamaguchi & Proctor, 2011, 2012). Thus, the spatial reference from external, salient objects in the go–nogo task could also provide spatial codes in the 2-choice task and modulate correspondence effects (see the next section for further discussion regarding the possibilities of combined effects).
Note that Dolk et al. (2013a) did not include the 2-choice task condition, as in Sebanz et al.’s (2003) joint go–nogo study. Likewise, Sebanz et al. did not include the presence of the co-actor in the 2-choice task. Consequently, it remains unclear whether the presence of the irrelevant object would also provide a reference frame in the 2-choice task and, if so, how that reference frame would interact with that generated by one’s own response alternatives in the 2-choice task. The present study aimed to examine these frame-of-reference issues using a completely counterbalanced design that included the cat-present vs. absence conditions in the go–nogo task and the 2-choice task within the same experiment. We further addressed whether the presence of the irrelevant object modulates correspondence effects in the auditory task (Experiment 1) and the visual task (Experiment 2), the latter in which the visual attentional resource available to process the irrelevant object is limited compared to the former. Note that our main interest was whether the presence of the irrelevant object, in the absence of an actual co-actor, would induce the correspondence effect. Therefore, we did not include the joint go–nogo condition as in previous joint Simon effect studies (e.g., Sebanz et al., 2003).
Task-irrelevant vs. task-relevant spatial references
To distinguish between the two aforementioned reference frames, we refer to the reference frame generated by the irrelevant, external object (e.g., the cat in Dolk et al., 2013a) that is not associated with the current task as the task-irrelevant spatial reference and the reference frame generated by the task instructions (e.g., the left and right response keys in the 2-choice task) as the task-relevant spatial reference. In other words, the task-relevant spatial reference is driven by the task instructions and performer’s intentions, whereas the task-irrelevant spatial reference is not.
As discussed above, the absence of the correspondence effect in the go–nogo task has been attributed to the lack of alternative responses (i.e., no task-relevant spatial reference; e.g., Hommel, 1996; Shiu & Kornblum, 1999). Consider the case in which the irrelevant object (e.g., the waving cat) is presented to the left side of the go response, spatial attention allocated to the irrelevant object could have provided a reference frame for coding the go response as right. Thus, the emergence of the correspondence effect with the presence of the irrelevant, external object in the go–nogo task could be solely due to the task-irrelevant spatial reference.
In the 2-choice task, the task-irrelevant spatial reference could also interact with the task-relevant spatial reference generated from one’s own responses and task instructions, modulating the correspondence effect for each response. Nevertheless, the extent to which the task-irrelevant spatial reference influences the correspondence effect elicited by the task-relevant spatial reference depends on the match between spatial codes from both references and how much attention is devoted to potential responses (e.g., Ansorge & Wühr, 2004; Memelink & Hommel, 2013; Yamaguchi & Proctor, 2011, 2012). Accordingly, one could argue that the task-irrelevant reference may boost the correspondence effect in the 2-choice task when spatial codes from both references are the same compared to when they are opposite. For the case in which the irrelevant object (e.g., the waving cat) is presented to the left of the two alternative responses in the 2-choice task, this task-irrelevant reference produces a “right” code for the right response in addition to the “right” code resulting from reference to the left response (the task-relevant reference). The agreement in coding from both sources should increase the correspondence effect when the irrelevant object is present compared to when it is not. For the left response, the task-irrelevant reference produces a “right” code but the reference from one’s own right response (the task-relevant reference) indicates a “left” code. The conflicting codes should decrease the correspondence effect when the irrelevant object is present compared to when it is absent.
Thus, the correspondence effect would be expected to be larger for the right response in the 2-choice task than in the go–nogo task due to both the task-relevant and -irrelevant references contributing to spatial coding in the former case but only the task-irrelevant reference in the latter case. Also, when the object is present, the increase and decrease in correspondence effects from the right and left responses, respectively, could cancel out each other, resulting in no change in the correspondence effect compared to that observed in the object-absent condition. Another possibility is that the spatial codes generated by the task-relevant reference are weighted more heavily than the codes from the task-irrelevant reference, resulting in little impact of the latter on the correspondence effect for either response in the 2-choice task.
The present study
The present study was designed to evaluate the combined impact of task-irrelevant and task-relevant spatial references by including both an individual go–nogo task and a 2-choice task within the same experiment. Experiment 1 followed Dolk et al. (2013a) and used auditory tasks. We further examined whether the findings with auditory tasks in Experiment 1 can be generalized to visual tasks in Experiment 2, as implied by Dolk et al. Again, our study was not designed to test the social content of co-actor representation in the go–nogo task but rather to examine the effect of spatial reference generated by a salient, irrelevant object that does not resemble any actions or task sharing. Therefore, we used the Japanese waving cat as Dolk et al. in both the individual go–nogo task and the 2-choice task.
Using LRP as an index of response activation
To accomplish the goal of obtaining online measures in response activation, we supplemented behavioral measures [e.g., response times (RT)] with online electrophysiological measures (e.g., ERPs); note that the latter measures are possible even on nogo trials for which there is no overt response (e.g., Kopp, Mattler, Goertz, & Rist, 1996; Miller & Hackley, 1992). In particular, we used LRPs, as in Holländer et al. (2011), to assess the similarity in response activation for go–nogo task and 2-choice task.
We chose to measure LRPs instead of the P3 and/or N2 used in most of the joint go–nogo task studies (e.g., Kopp et al., 1996; Sebanz et al., 2006; Tsai et al., 2006) because our primary interest was the early processing of response coding and activation, as reflected in the LRP, rather than the late processing of conflict evaluation and inhibition indicated by the N2 and P3. Furthermore, the relation between N2/P3 and conflict/inhibition has been questioned (e.g., Dimoska, Johnstone, & Barry, 2006; Donkers & Van Boxtel, 2004; Smith, Johnstone, & Barry, 2007) as some studies have shown that N2 occurred even when no response inhibition was required (e.g., Smith, Smith, Provost, & Heathcote, 2010).
With respect to LRPs as an index of response activation in the go–nogo task, Tsai et al. (2006) compared the LRP (in addition to N2 and P3) in different social context conditions—individual, joint, and being observed (i.e., one person performed the task with another one serving as an observer). They had participants perform a color discrimination task for which a red or green dot appeared in one of the three horizontally arranged discs. Results showed that, during the time window 100–200 ms after the stimulus onset, the LRP was modulated by the social context for the corresponding trials (more negative in the joint condition than the other two conditions) but not the noncorresponding trials (note, however, that there was a trend for a larger positive LRP in the joint condition than in the other two conditions; see their Table 5). The correspondence effect observed in the LRP for the joint condition has been interpreted as a priming effect of cortical responses provoked by the co-actor’s action. Along with the correspondence effect on RT (15 ms in the joint condition; 3 ms in the other two conditions), these results led Tsai et al. to conclude that one’s action and others’ actions are coded through a common response representation framework. Thus, one could argue that others’ actions (the task-irrelevant spatial reference) triggered similar motor preparation/activation as one’s actions (the task-relevant spatial reference). However, we should note that LRPs are sensitive to lateralization of visual stimuli, as in the case of Tsai et al.’s design (the target dot could be in the left, right, or middle location). Consequently, Tsai et al.’s LRP data may have confounded correspondence and electrode lateralization (e.g., Praamstra, 2007; Valle-Inclán, 1996). This limitation highlights a need for a much cleaner design to examine the similarity in cortical activation provoked by the task-irrelevant and -relevant spatial references.
To avoid the possible confound between correspondence and electrode lateralization, as in Tsai et al.’s (2006), we presented the visual target in the center of the screen (Experiment 2). We should note that although the auditory target stimuli in Experiment 1 were presented by the left or right speaker, the lateralized sensory activity elicited by the auditory stimuli should have a limited contribution to motor-related LRPs (e.g., Wascher, Schatz, Kuder, & Verleger, 2001; see also Dittrich, Kellen, & Stahl, 2014, and Neumann, van der Heijden, & Allport, 1986, for further discussion). For instance, Wascher et al. (2001, Experiment 2) found an increased lateralized ERP over the primary auditory cortex (T7/T8) about 130 ms after stimulus onset, with LRPs over the motor cortex (C1/C2) occurring later (about 270 ms after stimulus onset). This decoupling of sensory and motor cortex was evident with auditory stimuli (their Experiment 2) but not visual stimuli (their Experiment 1).
We argue that if the irrelevant object (e.g., the waving cat) provides a spatial reference frame for coding one’s responses in the go–nogo task (i.e., the task-irrelevant reference), just as for the task-relevant reference frame in the 2-choice task, then LRPs elicited in the go–nogo task should be similar to those of the 2-choice task in the presence of the cat but not in its absence. We also expected the correspondence effects in the behavioral data (e.g., RT) to be modulated by the cat presence/absence. These predictions were tested with an auditory task in Experiment 1 and a visual task in Experiment 2.
Experiment 1
Experiment 1 used a modified version of Dolk et al.’s (2013a) design in which a salient object (a Japanese waving cat), when present, was situated to the left of the location(s) at which the participant was responding. In addition to the go–nogo task as in Dolk et al., we included a 2-choice task. Thus, participants performed a go–nogo task or a 2-choice task with the presence or absence of the salient, irrelevant object in different blocks (i.e., a within-subject design). Figure 1a shows the experimental setting for the four combinations of the task and object conditions. We used a high- vs. low-pitched tone, containing no semantic meaning, analogous to the compressed and reversed auditory Dutch color words “green” and “purple” that Dolk et al. used. The tone was presented via the left or right speaker, with speaker location being irrelevant. Participants made a left or right keypress response to the tone pitch in the 2-choice task but only a right keypress response to one of two pitches in the go–nogo task. The tone location, though irrelevant to the task, could correspond to the response location or not. We measured the correspondence effect (noncorresponding minus corresponding) between tone location and response location on both behavioral and ERP data.

Experimental design and stimuli used in Experiment 1. a The experimental setting for the 2-object condition (present vs. absent) × 2-task condition (go–nogo vs. 2-choice) design. These diagrams were adopted and modified from Dolk et al. (2013a, Figure 1). In the present study, participant’s viewing distance from the monitor (19 inch) was 55 ms. The center of the left and right speakers was 48 cm relative to the center of the screen and was 73 cm diagonally the participant’s midline. The distance between the left and right response keys in the response box was 9 cm (center-to-center), positioned 36 cm from the monitor. The Japanese waving cat was 15.5 cm in height, 9 cm in width, and 8 cm in depth, which was placed 50 cm from the right response key. b An example of event sequence in Experiment 1. c An example of left-pointing, right-pointing, and straight (neutral) of hand used in Experiment 2. The dot was colored green or red in the experiment (color figure online)
In the object-absent condition, we expected a correspondence effect for the 2-choice task but not the go–nogo task, as in previous studies (e.g., Sebanz et al., 2006). According to Dolk et al. (2013a), if the salient, irrelevant object provides a reference frame that allows participants to code their action as left vs. right (i.e., the task-irrelevant reference), just as one’s own action alternatives provide a reference frame for response coding in the 2-choice task (i.e., the task-relevant reference), then similar response activation for the go–nogo task in the object-present condition and the 2-choice task should be observed. If responses are also coded relative to the object in the 2-choice task, presence of the object should increase the correspondence effect for the right response (which would be right relative to both the alternative response and the object) compared to the left response (which would be left relative to the alternative response but right relative to the object).
Methods
Participants
Twenty-six undergraduate students from Oregon State University participated in exchange for extra course credit. Data from two participants were excluded from the final analyses due to excessive artifacts in the electroencephalographic (EEG) data for one participant and the failure of recording EEG data for another participant (see below). As a consequence, 13 participants started with the go–nogo task and then performed the 2-choice task, whereas the remaining 11 participants performed the tasks in the opposite order. The 24 participants (16 females) had a mean age of 21 years (range 18–32), and all were right handed and reported having normal or corrected-to-normal acuity.
Apparatus, stimuli, and procedure
Stimuli, displayed on a 19-inch monitor, were viewed from a distance of about 55 cm. A high-pitched tone (500 Hz) or low-pitched tone (200 Hz) was presented for 300 ms through the left or right speaker, positioned 48 cm to the respective side of the monitor (41.11°, center-to-center) and 73 cm diagonally to the participant’s midline. The distance between the left and right response keys in the response box was 9 cm (center-to-center), and it was positioned 36 cm from the monitor. In the object-present condition, the Japanese waving cat (15.5 cm in height, 9 cm in width, and 8 cm in depth) was placed 50 cm from the right response key, as in Dolk et al.’s (2013a) study. The cat kept waving with the left arm during the experiment. In the object-absent condition, everything was identical except that the Japanese waving cat was removed from the room.
Figure 1b illustrates an example of the event sequence. Each trial started with a fixation cross in the center for 1200 to 1400 ms (determined randomly) and was followed by an auditory tone that was presented for 300 ms via one of the speakers. The fixation cross remained on the screen until participants made a response or when a 2000-ms deadline was reached. The participants’ task was to indicate whether the tone was high or low pitch by pressing the left response-box button with the left-index finger or the right button with the right-index finger in the 2-choice task. The mapping between tone pitch and response key (stimulus–response mapping) was counterbalanced across participants. In the go–nogo task, they were told to press the rightmost button with the right-index finger for one tone pitch and withhold their response for the other. As a result, the response hand and response location were always compatible. Therefore, we used the term “response location” rather than “response hand” to simplify our descriptions below. Visual feedback, “Correct” or “Incorrect”, was presented in the center of the screen for 300 ms. The next trial then began with the fixation cross.
Each participant completed two sessions, one for each of the two task conditions (go–nogo task or 2-choice task), with session order varied between participants. Within each session, participants performed one practice block of 18 trials, followed by 3 experimental blocks of 88 trials each for the object-present condition and 3 experimental blocks of 88 trials each for the object-absent condition (a total of 528 experimental trials for each session) with the order of the two object conditions being randomly determined. The response location corresponded with the tone location for half of the trials but not for the other half. Participants were instructed to respond to the tone as quickly and accurately as possible. They completed these two sessions within a single visit and were given breaks between blocks and between sessions.
EEG recording
The EEG activity was recorded from F3, Fz, F4, C3, Cz, C4, P3, Pz, P4, P7, P8, PO7, PO8, O1, and O2. These sites and the right mastoid were recorded in relation to a reference electrode at the left mastoid. The ERP waveforms were then re-referenced offline to the average of the left and right mastoids. The horizontal electrooculogram (HEOG) was recorded bipolarly from electrodes at the outer canthi of both eyes, and the vertical electrooculogram (VEOG) was recorded from electrodes above and below the midpoint of the left eye. Electrode impedance was kept below 5 kΩ. EEG, HEOG, and VEOG were amplified using Synamps2 (Neuroscan) with a gain of 2000 and a bandpass of 0.1–40 Hz. The amplified signals were digitized at 500 Hz.
Trials with artifacts were identified in two steps. First, trials with artifacts were rejected automatically using a threshold of ±75 µV for a 1000 ms epoch beginning 200 ms before stimulus onset and ending 800 ms after stimulus onset. Second, each of these candidate artifact trials was then inspected manually. One of the original 26 participants was eliminated because of artifact rejection on more than 25 % of trials. Another participant’s EEG data failed to be recorded. Thus, only 24 participants’ data were included in the final analyses.
Results
We excluded trials from the final analyses of behavioral data [RT and proportion of error (PE)] and ERP data if RT was less than 100 ms for the 2-choice task, which eliminated 0.01 % trials. Rejection of trials with EEG artifacts led to the elimination of 3 % of trials, with no more than 21 % rejected for any individual participant. Trials were also excluded from the RT and ERP analyses if the response was incorrect (note that the trials were considered as incorrect if participants failed to respond within the 2000-ms deadline). An alpha level of 0.05 was used to ascertain statistical significance. Reported confidence intervals were based on a 95 % confidence interval, shown as the mean ± the confidence interval half-width.
Behavioral data analyses
An analysis of variance (ANOVA) on both RT and PE, excluding the nogo trials, was conducted including the between-subject variable of task order (go–nogo task first and 2-choice task second vs. 2-choice task first and go–nogo task second), and within-subject variables of task type (go–nogo task vs. 2-choice task), object condition (present vs. absent), and response-location/tone-location correspondence (corresponding vs. noncorresponding). We report only the effects that are critical for our study. The complete summary of the ANOVA is given in Appendix 1.Footnote 1 Tables 1 and 2 show the mean RT and PE, respectively, for each of these conditions. Figure 2 shows the mean RT averaged across the two task orders.

Mean response times as a function of object condition (present vs. absent) and response location and tone location correspondence (corresponding vs. noncorresponding) averaged across the two task order groups for the go–nogo task and the 2-choice task in Experiment 1. Error bars represent the standard error of the mean
Response time
The main effect of correspondence and its interaction with task type were significant (see Appendix 1 for detailed statistical results). The overall correspondence effect was 21 ms, with the effect being larger for the 2-choice task (35 ± 8 ms) than the go–nogo task (6 ± 7 ms). The interaction between correspondence and object condition was also significant; the correspondence effect was larger for the object-present condition (25 ± 8 ms) than for the object-absent condition (16 ± 6 ms).
The larger correspondence effect for the object-present condition than the object-absent condition was observed regardless of the task type (go–nogo task vs. 2-choice task), F < 1.0. For the go–nogo task, the correspondence effect was 13 ± 10 ms and −1 ± 9 ms for the object-present and object-absent conditions, respectively. We conducted further t tests on the correspondence effect for each object condition in the go–nogo task, averaged across the two task order groups. Results showed the effect to be significant for the object-present condition, t(23) = 2.56, p = 0.0176, but not the object-absent condition, |t| < 1.0. In addition, a t test on the difference of the correspondence effect between the object-present and -absent conditions was significant, t(23) = 2.24, p = 0.0353. For the 2-choice task, the correspondence effect was 38 ± 10 ms and 33 ± 8 ms for the object-present and object-absent conditions, respectively. Further t tests on the correspondence effect for each object condition showed that the effect for the 2-choice task was significant for both conditions, ts(23) ≥ 7.93, ps < 0.0001. Unlike the go–nogo trials, however, a t test on the difference between the correspondence effect for the object-present and -absent conditions was not significant for the 2-choice task, t(23) = 1.32, p = 0.20.
To further examine how the correspondence effect in the 2-choice task was influenced by both the task-relevant and -irrelevant spatial references, we conducted additional analysis of the correspondence effect in the 2-choice task as a function of response (left vs. right) and object condition (cat present vs. cat absent), averaged across the two task order groups. Although the interaction between response and object condition was not statistically significant, F(1, 23) = 3.05, p = 0.09, η 2 p = 0.12, the increase in the correspondence effect from the cat-absent condition to the cat-present condition was numerically larger for the right response (from 35 ± 11 ms to 47 ± 11 ms) than the left response (from 30 ± 11 ms to 29 ± 12 ms). Further one-tailed t test analyses revealed that the increase in the correspondence effect from the cat-absent condition to the cat-present condition was significant for the right response (13 ± 13 ms), t(23) = 2.02, p = 0.0276, but not for the left response (−1 ± 11 ms), |t| < 1.0.
Percentage error
For the PE data, the main effects of correspondence and task type were significant, Fs(1, 22) ≥ 30.12, ps < 0.0001, η 2 p s ≥ 0.58. The overall correspondence effect was 0.017. The PE was smaller for the go–nogo task (0.003) than the 2-choice task (0.034). The interaction between correspondence and task type was also significant, F(1, 22) = 37.22, p < 0.0001, η 2 p = 0.63, with the correspondence effect being smaller for the go–nogo task (−0.001) than the 2-choice task (0.036).
As for RT, we further examined how the correspondence effect in the 2-choice task was influenced by both the task-relevant and -irrelevant spatial references. A follow-up ANOVA on the correspondence PE data for the 2-choice task was conducted as a function of response (left vs. right) and object condition (cat present vs. cat absent). Results showed that the interaction between response and object condition was not significant, F < 1.0. The correspondence effects for the right response were 0.028 ± 0.016 and 0.047 ± 0.021 for the cat-absent and cat-present conditions, respectively, and for the left response were 0.024 ± 0.015 and 0.039 ± 0.016. No other effects were significant.
ERP data analyses
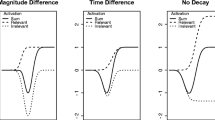
The LRPs were measured by calculating the difference waveforms between the C3 and C4 electrode sites using the following equation: LRP = (Left Hand [C4 − C3] + Right Hand [C3 − C4])/2. The average LRP amplitudes were analyzed over the four consecutive 100-ms time windows from 0 to 400 ms after stimulus onset, and were adjusted relative to the mean amplitude during a 200-ms baseline period prior to stimulus onset. Figure 3 shows the scalp distribution of brain potentials over the four consecutive 100-ms time windows from 0 to 400 ms after stimulus onset for the object-present vs. absence condition in the go–nogo task and the 2-choice task.

The scalp distribution of event-related potentials for every 100-ms interval during the time window 0–400 ms after stimulus onset a function of object condition (present vs. absent) for the go–nogo task and the 2-choice task in Experiment 1
The LRP data, including the nogo trials, were analyzed as a function of task order (go–nogo task first and 2-choice task second vs. 2-choice task first and go–nogo task second), task type (go–nogo task vs. 2-choice task), object condition (cat present vs. cat absent), and correspondence between response location and tone location (corresponding vs. noncorresponding). Figure 4 shows the LRPs for each of these conditions averaged across the task order. The negative polarity indicates the preparation of a correct response hand, whereas the positive polarity indicates the preparation of an incorrect response hand. Our primary interest was whether the LRP was modulated by the correspondence between response location and tone location for the go–nogo and 2-choice tasks when the object was present vs. when the object was absent. Figure 4 shows that LRPs for corresponding and noncorresponding trials diverged during the time window 100–200 ms after stimulus onset.Footnote 2 Therefore, we reported only these effects for this particular time window below. The complete summary of the ANOVA is given in Appendix 2.

Grand average LRP waveforms as a function of object condition (present vs. absent) and response location and tone location correspondence (corresponding vs. noncorresponding) for the go–nogo task and the 2-choice task in Experiment 1. Negative is plotted upward and time zero represents stimulus onset
For the time window 100–200 ms, an overall correspondence effect of 0.413 μV (noncorresponding LRP minus corresponding LRP) was observed, F(1, 22) = 7.74, p < 0.05, η 2 p = 0.26. The four-way interaction between correspondence, task order, task type, and object conditions was also significant, F(1, 22) = 4.17, p = 0.05, η 2 p = 0.16. For the group who performed the go–nogo task first followed by the 2-choice task, the correspondence effect in the object-present condition was similar to the effect in the object-absent condition for the go–nogo task (0.044 vs. 0.234 μV, respectively), |t| < 1.0, but was larger, albeit nonsignificantly, for the 2-choice task (0.701 μV for object present vs. 0.189 μV for object absent), t(23) = 1.42, p = 0.1815. The pattern was opposite for the group who performed the 2-choice task first followed by the go–nogo task; the effect was smaller, albeit nonsignificantly, in the object-present condition than the object-absent condition for the 2-choice task (0.339 vs. 0.830 μV, respectively), t(23) = −1.57, p = 0.1467, but was similar between the two conditions for the go–nogo task (0.569 μV for object present vs. 0.490 μV for object absent), t < 1.0. Further data analyses excluding the nogo trials (analogous to the behavioral data analyses) showed only a significant correspondence effect (0.455 μV) during the time window 100–200 ms, F(1, 22) = 8.09, p < 0.01, η 2 p = 0.27. No other effects were found to be significant.
As in the behavioral data analyses, we conducted further analyses on the 2-choice task as a function of response (left vs. right), as well as object condition (cat present vs. cat absent). The interaction between response and object condition was not statistically significant for all time windows, Fs < 1.0. During the time windows 100–400 ms, however, there was a trend for a larger increase in the correspondence effect for the cat-present condition relative to the cat-absent condition for the right response than the left response. The increase was 0.116 μV for the right response and −0.011 μV for the left response during the time window 100–200 ms, 0.427 vs. 0.286 μV, respectively, during the time window 200–300 ms, and 0.483 vs. 0.309 μV during the time window 300–400 ms. These LRP data suggest that the presence of the cat modulated the coding slightly more for the right response than the left response in the 2-choice task.
Discussion
Experiment 1 used behavioral and LRP measures to examine whether the presence of the salient, irrelevant object provides a spatial reference frame for coding responses, as suggested by Dolk et al. (2013a). Critically, for the go–nogo task, the correspondence effect was negligible and nonsignificant when the cat was absent (−1 ± 9 ms) but was evident when the cat was present (13 ± 10 ms), replicating Dolk et al.’s finding. Although the LRP data showed a slightly larger correspondence effect in the cat-present condition than the cat-absent condition when the go–nogo task was performed second, it was not significant. These findings suggest that the presence of the salient, irrelevant object could modulate the correspondence effect in the go–nogo task to some degree.
For the 2-choice task, the behavioral data revealed a correspondence effect on RT when the Japanese waving cat was absent (33 ± 8 ms), replicating traditional studies on stimulus–response correspondence effects using an auditory task (e.g., Proctor & Shao, 2010: Simon, 1990; Simon & Rudell, 1967). As in the go–nogo task, the presence of the cat elicited a numerically larger correspondence effect for the 2-choice task (38 ± 10 ms), albeit not significantly (p = 0.20), suggesting that the irrelevant cat may have provided a spatial reference for this task as well (see below), in addition to the task-relevant one generated by the performer’s own response alternatives for coding the left vs. right responses.
As discussed in the Introduction regarding coding from both task-irrelevant and task-relevant references in the 2-choice task, the increase in the correspondence effect due to the cat should be restricted mainly to the right response, for which the “right” code from the task-irrelevant reference reinforces the “right” code from the task-relevant reference. The left response should not show an increased correspondence effect, and possibly a decrease, because the task-irrelevant “right” code does not reinforce the task-relevant “left” code and may even produce conflict. The correspondence effect did indeed increase from the cat-absent condition to the cat-present condition for the right response (the increase was 13 ± 13 ms) but not the left response (the increase was −1 ± 11 ms). The LRP also showed a trend of an increased correspondence effect in the cat-present condition relative to the cat-absent condition for the right response. These results suggest that the task-irrelevant object could provide spatial coding but generates weaker response activation than does the task-relevant reference (see below and “General discussion” for detailed discussion). Furthermore, the contribution of task-irrelevant reference codes to the left and right responses in the 2-choice task could have canceled each other out, as demonstrated by the overall correspondence effect on RT for the 2-choice task being unaffected by the cat-present condition.
The present findings are consistent with the referential coding account and suggest that responses may be coded relative to the location of the salient irrelevant object, in this case, the Japanese waving cat. For the go–nogo task, this task-irrelevant reference frame provided the sole basis for coding the response as “right”. For the 2-choice task, the task-irrelevant frame produced a “right” code for the right response in addition to the “right” code for the right response resulting from the task-relevant reference frame (i.e., reference to the left response), yielding a larger correspondence effect for that response with the cat present than with it absent. Nevertheless, the spatial reference frame provided by the irrelevant, salient cat may not be equivalent in weighting in the response activation compared to the task-relevant spatial reference generated by individual’s own response alternatives and task instructions. The correspondence effect in the cat-present condition for the go–nogo task (13 ± 10 ms) and the increase in correspondence effect for the right response in the 2-choice task (13 ± 13 ms) were smaller than the size of the effect observed in the 2-choice, cat-absent condition (33 ± 8 ms). These results suggest that the task-relevant reference generated by the task instructions is weighted more heavily than the task-irrelevant reference generated by the irrelevant object (see Memelink & Hommel, 2013; Yamaguchi & Proctor, 2012, for discussions of intentional weighting). This difference in weighting likely is due to the need to discriminate between the potentially executable responses in the 2-choice task (e.g., Ansorge & Wühr, 2004; Reeve & Proctor, 1988).
Experiment 2
In Experiment 1, the correspondence effect was observed in the auditory go–nogo task when the cat was present. As implied by Dolk et al. (2013a), equivalent findings should be observed with visual go–nogo tasks (see above). Nevertheless, they also argued that the spatial coding for visual stimuli is more dominant than the spatial coding of auditory stimuli, which might lead to a larger effect for the visual than auditory go–nogo tasks. At the same time, they also pointed out the possibility that the use of the visual task comparing to the auditory task might leave little attentional capacity to process the salient object, resulting in a smaller, or even absence of, correspondence effect elicited by the cat in the visual go–nogo tasks.
To evaluate these possibilities, we used a visual task in Experiment 2. Although we could present the visual target to left or right side of the screen, just as the tone was presented to the left or right speaker in Experiment 1, LRPs are sensitive to lateralization of visual stimuli and, therefore, confound correspondence and electrode lateralization (e.g., when the stimulus is presented laterally but not centrally). That is, any horizontally lateralized visual objects would elicit asymmetric brain potentials between electrodes located in the two hemispheres, which would be difficult to distinguish from LRPs (e.g., Praamstra, 2007). As discussed above, this confound was unlikely to occur with auditory stimuli because the lateralized sensory activity triggered by auditory stimuli has found to arise before motor-related LRPs (e.g., Wascher et al., 2001).
To avoid the possible contribution of lateralized sensory activity to LRPs with visual stimuli, we adopted Sebanz et al.’s (2003) design where a hand was presented centrally on the screen. However, instead of using a colored ring as in Sebanz et al.’s study, we presented a colored dot in the center of a hand for which the index finger pointing to the left, right, or straight (see Fig. 1c for examples). This design was analogous to Holländer et al. (2011) study and allowed us to ensure that the colored dot was presented centrally without conveying any lateralized information. Participants made a left or right keypress response to the dot color (red or green) in the 2-choice task but only a right keypress response to a pre-specified color in the go–nogo task. The hand-pointing direction, though irrelevant to the task, could correspond to the response location or not. Thus, we measured the correspondence effect between hand-pointing direction and response location on both behavioral and ERP data.
Methods
Participants
There were 26 new participants, from the same participant pool as in Experiment 1. One participant’s data were excluded because of EEG artifact rejection rate of more than 25 % of trials and one participants’ EEG data failed to be recorded. Therefore, data from 24 participants (16 females), mean age of 20 years (range 18–29), were included in the final data analyses. Thirteen participants started with the go–nogo task and then the 2-choice task, whereas the remaining 11 started with the 2-choice task and then the go–nogo task. They were all right handed. All reported having normal vision and hearing. They also demonstrated normal vision using the Ishihara Test for color deficiency.
Apparatus, stimuli, and procedure
The equipment and procedure were the same as in Experiment 1, with the exceptions being noted. Instead of the auditory tone task, we used a visual color discrimination task where a color dot appeared inside a pointing hand. The left-/right-pointing hand was 8.28° (width) × 5.71° (length) and the hand pointing straight was 3.64° (width) × 5.71° (length). The entire hand was centrally located on the screen. The dot, centrally located inside the pointing hand, was 1.67° in diameter and was red [RGB 255, 50, 10; CIE (Yxy) 23.56, 0.62, 0.34] or green [RGB 0, 158, 0; CIE (Yxy) 24.45, 0.30, 0.60]. The participants’ task was to indicate whether the dot color was red or green by pressing one of the two keys in the 2-choice task and respond to only one pre-specified color in the go–nogo task. The hand/dot stimuli were on the screen until participants made a response or when a 2000-ms deadline was reached. Feedback (a tone for an incorrect response or the fixation display for a correct response) was presented for 100 ms.
Within each session, participants performed one practice block of 18 trials, followed by 3 experimental blocks of 90 trials each for the object-present condition and 3 experimental blocks of 90 trials each for the object-absent condition (a total of 540 experimental trials for each session) with the order of the two object conditions being randomly determined. For 1/3 of the trials, the response location was corresponding with the hand-pointing direction. For the other 1/3, they were noncorresponding. For the remaining 1/3 of the trials, the hand-pointing direction was neutral (i.e., straight).
Results
The data analysis was similar to that of Experiment 1. Application of the pre-determined RT cutoff (<100 ms) eliminated no trials (note that the 2000 ms response deadline was also used in Experiment 2 as in Experiment 1). Rejection of trials with EEG artifacts led to the further elimination of 5 % of trials, but not more than 25 % for any participant.
Behavioral data analyses
As in Experiment 1, the behavioral data excluding the nogo trials were analyzed as a function of task order (go–nogo task first and 2-choice task second vs. 2-choice task first and go–nogo task second), within-subject variables of task type (go–nogo task vs. 2-choice task), object condition (present vs. absent), and response-location/hand-pointing direction correspondence (neutral, corresponding, vs. noncorresponding). Whenever appropriate, p values were adjusted using the Greenhouse–Geisser epsilon correction for nonsphericity. As in Experiment 1, we report only the effects that are critical for our study. The complete summary of the ANOVA is given in Appendix 3. Tables 3 and 4 show the mean RT and PE, respectively, for each of these conditions. Figure 5 shows the mean RT averaged across the two task orders.

Mean response times as a function of object condition (present vs. absent) and response location and hand-pointing-direction correspondence (neutral, corresponding, vs. noncorresponding) averaged across the two task order groups for the go–nogo task and the 2-choice task in Experiment 2. Error bars represent the standard error of the mean
Response time
Mean RT was 35 ms shorter for the go–nogo task (372 ms) than the 2-choice task (407 ms), F(1, 22) = 8.98, p < 0.01, η 2 p = 0.29. The main effect of correspondence was significant, F(2, 44) = 4.38, p < 0.05, η 2 p = 0.17; mean RT was shorter for the neutral and corresponding trials (387 and 389 ms, respectively) than the noncorresponding trials (393 ms). The interaction between correspondence and task type was significant, F(2, 44) = 4.90, p < 0.05, η 2 p = 0.18. The difference in RT between the noncorresponding trials and other trials was more pronounced for the 2-choice task (406, 403, and 417 ms for neutral, corresponding, and noncorresponding, respectively) than the go–nogo trials (368, 376, and 373 ms, respectively).
The critical question in our study is whether the presence of the salient, irrelevant cat modulates the correspondence effect (noncorresponding–corresponding) for both the go–nogo task and the 2-choice task. Therefore, we conducted further analyses on the correspondence effect as a function of object condition and task type, averaged across the two task order groups. Similar to Experiment 1, the analyses revealed that the correspondence effect was larger for the 2-choice task (10 ± 5 ms) than the go–nogo task (−2 ± 5 ms), F(1, 23) = 8.63, p < 0.01, η 2 p = 0.27. Different from Experiment 1, however, the correspondence effect was not modulated by the object condition, F < 1.0. In addition, the three-way interaction between correspondence, object condition, and task type was not significant, F < 1.0. For the go–nogo trials, the correspondence effect was −1 ± 7 ms and −3 ± 8 ms for the object-present and object-absent conditions, respectively. Further t test analyses revealed that not only these effects were negligible, |ts| < 1.0, but also the difference in the effect between these two object conditions was not significant, t < 1.0. Like Experiment 1, the correspondence effect in the 2-choice task remained unaffected by the cat condition: 12 ± 8 ms and 8 ± 6 ms for the object-present and object-absent conditions, respectively. Further t test analyses showed that the correspondence effect was significant for both object conditions, ts(23) ≥ 2.54, ps < 0.05, but the difference between them was not, t < 1.0. No other effects were significant.
As in Experiment 1, we conducted further analysis of the correspondence effect as a function of response (left vs. right) and object condition (cat present vs. cat absent) for the 2-choice task, averaged across the two task order groups. The overall correspondence effect for the 2-choice task was similar for the cat-present condition (12 ± 8 ms) and the cat-absent condition (8 ± 6 ms), F < 1.0, consistent with the prior analysis. The interaction between response and object condition was not statistically significant, F < 1.0. The correspondence effects for the right response were 10 ± 8 ms and 17 ± 11 ms for the cat-absent and cat-present conditions, respectively, and for the left response were 6 ± 11 ms and 6 ± 10 ms.
Percentage error
PE was 0.038 smaller for the go–nogo task (0.001) than the 2-choice task (0.038), F(1, 22) = 35.19, p < 0.0001, η 2 p = 0.62. PE was smaller for the corresponding trials (0.017) than the neutral and noncorresponding trials (0.020 and 0.024, respectively), F(2, 44) = 3.72, p < 0.05, η 2 p = 0.14. A follow-up ANOVA on the PE data for the 2-choice task, as a function of response (left vs. right) and object condition (cat present vs. cat absent), showed no significant effect, Fs < 1.0. The correspondence effects on PE for the right response were −0.004 and −0.001 for the cat-absent and cat-present conditions, respectively, and for the left response were −0.011 and 0.004. No other effects were significant.
ERP data analyses
The LRP data including the nogo trials were analyzed as a function of task order, task type (go–nogo task vs. 2-choice task), object condition (cat present vs. cat absent), and correspondence between response location and hand-pointing direction (neutral, corresponding, vs. noncorresponding) over the four consecutive 100-ms time windows from 0 to 400 ms after stimulus onset. Again, our primary interest was whether the LRP was modulated by the correspondence between response location and hand-pointing direction for the go–nogo and 2-choice tasks when the object was present vs. when the object was absent. As in Experiment 1, we reported only these effects during the time window 100–200 ms after stimulus onset below. The complete summary of the ANOVA is given in Appendix 4. Figure 6 shows the LRPs for each of these conditions averaged across the task order.

Grand average LRP waveforms as a function of object condition (present vs. absent) and response location and hand-pointing-direction correspondence (neutral, corresponding, vs. noncorresponding) for the go–nogo task and the 2-choice task in Experiment 2. Negative is plotted upward and time zero represents stimulus onset
The LRP for the corresponding, noncorresponding, and neutral trials started to diverge during the time window 100–200 ms after stimulus onset, F(2, 44) = 20.14, p < 0.0001, η 2 p = 0.48. This pattern did not vary as a function of task type and/or object condition for this time window, Fs(2, 44) ≤ 1.64, ps ≥ 0.21, η 2 p s ≤ 0.07. Nevertheless, the four-way interaction between task order, task type, object condition, and correspondence was significant during the time window 100–200 ms, F(2, 44) = 4.15, p < 0.05, η 2 p = 0.16. For the group who performed the go–nogo task first followed by the 2-choice task, the correspondence effect for the cat-present condition was similar to the cat-absent condition in the go–nogo task (−0.357 vs. −0.302 μV, respectively), |t| < 1.0, but was larger in the 2-choice task (−0.496 vs. 0.229 μV), t(23) = −3.11, p = 0.0091. The pattern was opposite for the group who performed the 2-choice task first followed by the go–nogo task; the effect was slightly smaller in the cat-present condition than the cat-absent condition for the 2-choice task (−0.802 vs. −1.368 μV, respectively), t(23) = 2.07, p = 0.0656, but was slightly larger for the go–nogo task (−1.234 vs. −0.709 μV), t(23) = −2.06, p = 0.0669. Additional data analyses excluding the nogo trials (analogous to the behavioral data analyses) showed similar results for the time window 100–200 ms; correspondence did not interact with object condition and/or task type, Fs(2, 44) ≤ 1.21, ps ≥ 0.31, η 2 p s ≤ 0.05.
As in Experiment 1, we conducted further analyses on the 2-choice task as a function of response (left vs. right) and object condition (cat present vs. cat absent), averaged across the two task order groups. The interaction between response and object condition was not statistically significant for the time windows 100–400 ms, Fs(1, 23) ≤ 2.34, ps ≥ 0.14, η 2 p s ≤ 0.09. Different from Experiment 1, there was little evidence of an increase in the correspondence effect for the cat-present condition relative to the cat-absent condition for the right response than the left response for all time windows. The increase was 0.311 μV for the right response and −0.338 μV for the left response during the time window 0–100 ms, 0.193 vs. −0.461 μV, respectively, during the time window 100–200 ms, 0.279 vs. −0.175 μV, respectively, during the time window 200–300 ms, and 0.400 vs. 0.061 μV during the time window 300–400 ms. These LRP data are consistent with the behavioral data, revealing little evidence for the presence of the cat to enhance the coding for the right response than the left response in the 2-choice visual task.
Discussion
Experiment 2 examined whether the modulation of the correspondence effect by the irrelevant cat in the auditory go–nogo task observed in Experiment 1 can be extended to a visual go–nogo task. As in Sebanz et al.’s (2006) study, we used visual stimuli, where participants responded to a colored dot in the center of a centrally located finger-pointing hand. The behavioral data revealed no correspondence effect for the go–nogo task (−2 ± 5 ms). More importantly, the presence of the Japanese waving cat did not elicit a correspondence effect (−1 ± 7 ms for cat present vs. −3 ± 8 ms for cat absent; |ts| < 1.0). Our results for the cat-absent condition in the go–nogo task replicated Sebanz et al.’s finding in the individual go–nogo condition showing, in addition to shorter RT for the neutral trials than the other two types of trials, a negligible correspondence effect (−3 ms in the present experiment and 3 ms in Sebanz et al.). Contrary to the go–nogo task, there was a correspondence effect for the 2-choice task (overall 10 ± 5 ms on RT), which was similar to the 9-ms effect observed in Sebanz et al.’s study (see their Fig. 2). Most important, the effect was not modulated by the presence or absence of the Japanese waving cat (12 ± 8 vs. 8 ± 6 ms, respectively). The increase in the correspondence effect of RT with the presence of the cat was small for the right response (increase 7 ± 11 ms) and was negligible for the left response (increase 0 ± 12 ms) in the 2-choice visual task.
Consistent with the behavioral data, the LRP data for the go–nogo task revealed little evidence for the enhancement of the correspondence effect when the cat was present. There was marginal evidence for the enhancement when the go–nogo task was performed after the 2-choice task (p = 0.0669), which could be due to a residual carry-over effect of spatial coding from performing the 2-choice task (i.e., task-relevant spatial references). For the 2-choice task, the increase in the correspondence effect for the right response than the left response was not apparent in both LRP and RT, either. Thus, there was no evidence that the irrelevant cat, despite being salient, provided a reference frame for response coding when participants performed a visual task, presumably where attention was allocated to the visual target in the center of the screen.
General discussion
The present study examined whether the spatial reference frame generated by the salient, irrelevant object (the task-irrelevant reference) in the go–nogo task influenced performance similar to the task-relevant reference frame generated by one’s own response alternatives in the 2-choice task. In addition, we investigated how these two sources of spatial coding jointly influenced performance in the 2-choice task. According to the referential coding account, any salient, irrelevant object that attracted attention, irrespective of its social attributes, would provide a reference frame for response coding in the go–nogo task. Dolk et al. (2013a) have provided evidence for the referential coding view using a salient, irrelevant object (such as the Japanese waving cat), but their findings do not speak to the issues investigated in the present study since they did not include a 2-choice task condition or study the influence of the object with visual stimuli.
Main findings
We, therefore, included both go–nogo and 2-choice tasks within the same experiment. To provide more direct, converging evidence, we used moment-to-moment ERP measures to complement behavioral measures. The correspondence effect on RT and LRPs, an index of response activation, was measured with the presence or absence of the Japanese waving cat. Experiment 1 used an auditory tone task, where the tone was presented to the left or right speaker. We found the correspondence effect on both RT and LRP to be modulated by the cat condition in the go–nogo task. When the cat was absent, the correspondence effect on RT was absent in the go–nogo task (−1 ± 9 ms). Note our effect was smaller than that observed by Dolk et al. (2013a, nonsignificant 7 ms in Experiment 1). When the cat was present, however, an effect of 13 ± 10 ms was observed. This effect was similar in size to that obtained in Dolk et al.’s study (19 ms), in which they used compressed and reversed spoken Dutch color words instead of auditory tones as in our Experiment 1.
Consistent with the behavioral data, the correspondence effect on LRPs in Experiment 1 was also modulated by the cat condition, with the impact being slightly stronger during the time window 100–200 ms after stimulus onset. Thus, even a salient, nonsocial object can elicit a correspondence effect in the go–nogo task, indicating that action co-representation from a partner (e.g., Knoblich & Sebanz, 2006; Sebanz et al., 2003) is not necessary. Unlike the go–nogo trials, however, the correspondence effect for the 2-choice task was not affected significantly overall by the presence or absence of the cat (38 ± 10 ms for the former and 33 ± 8 ms for the latter). As discussed in Introduction, the spatial reference codes generated by the irrelevant object could boost the spatial code for one response but counter the code for the alternative response, resulting in net zero impact on the overall correspondence effect. The results showed evidence consistent with this possibility: the right response showed a mean 13 ± 13 ms larger correspondence effect when the cat was present than when it was absent, and with the LRP showing a similar trend.
This pattern of results is generally consistent with that obtained by Xiong and Proctor (2015) for an auditory go–nogo Simon task in which participants held a steering wheel with both hands. The thumbs were placed on response buttons throughout the study but only one response was used for the designated tone pitch in separate trial blocks. This arrangement showed an overall Simon effect of 11.5 ms relative to the wheel-based reference frame. The overall Simon effect did not differ significantly in size when a salient, dynamic visual display (intended to mimic an automobile’s infotainment system) was located to the left or right side of the wheel, but the Simon effect was smaller for the response nearer the display than for the one farther away, implicating coding relative to the salient visual display as well as the wheel.
Experiment 2 further examined whether the finding of Experiment 1 can be extended to a visual task using a modified visual task of Sebanz et al. (2003). Participants determined the color of a dot within a pointing hand, where the pointing direction was irrelevant to the task. Unlike Experiment 1, we found that the correspondence effect on RT was not modulated by the cat condition. For the 2-choice task, the correspondence effect on RT was 12 ± 8 ms for the cat-present condition and was 8 ± 6 ms for the cat-absent condition. For the go–nogo task, the effect was −1 ± 7 ms and −3 ± 8 ms for the cat-present and -absent conditions, respectively. Although the LRP data showed a trend of correspondence effect being modulated by the cat condition for the go–nogo task during the time window 100–200 ms when the go–nogo task was performed second, it only approached being significant. Overall, the modulation of irrelevant object on the correspondence effect for the go–nogo task seems to be stronger with the auditory stimuli (Experiment 1) than the visual stimuli (Experiment 2).
Thus, of the options that Dolk et al. (2013a) proposed for possible results with visual stimuli, those findings suggest that allocating attention to the centrally presented visual target may have reduced the chance of spatial reference being generated from the salient, irrelevant object located in the peripheral field. Regardless, the salient object, if attended, has the ability to provide a reference frame for coding one’s response, rather than this process occurring automatically (e.g., Dittrich et al., 2012; Nicoletti & Umiltá, 1989a, b).
Influence of task order on correspondence effects
In the present study, participants either performed the go–nogo task blocks first followed by the 2-choice task blocks, or vice versa. Ansorge and Wühr (2004; Experiment 4) found a correspondence effect for the go–nogo trial block when the block was performed after the 2-choice block but not before. In their Experiment 5, they further demonstrated that the correspondence effect for the go–nogo trial was present when participants initiated each trial with a response that was spatially opposite to the go response (e.g., the left key to start the trial when the go response was the right key) but not when the same go response key was used to initiate the trial (e.g., the right key to start the trial when the go response was also the right key). Ansorge and Wühr argued that the observed correspondence effect in the go–nogo block was primarily due to a need to discriminate between left and right responses.
According to this response discrimination account, one would expect the correspondence effect to be observed in the go–nogo block in our study when it was performed after the 2-choice block. In contrast to this prediction, the correspondence effect on RT for the go–nogo trials was not modulated by the task order in both Experiments 1 and 2. The overall effect for the go–nogo trials was similar when they were performed first and second in both experiments, |ts| < 1.0 (Experiment 1: 6 ms on the go–nogo trials for both orders; Experiment 2: −2 and −3 ms, respectively). The behavioral data in Experiment 1 further revealed that the correspondence effect observed with the cat-present condition but not with the cat-absent condition in the go–nogo trials was not varied as a function of task order, F < 1.0 (see Table 1).
Those behavioral data are inconsistent with Ansorge and Wühr’s (2004) response discrimination account and suggest that frequent response discriminations in the 2-choice task blocks (a total of 528 trials in each of the present experiments comparing to 100 trials in Ansorge and Wühr) are not sufficient to induce the correspondence effect in the subsequent go–nogo trials. Nevertheless, our LRP data showed a trend of the task order effect. In Experiment 1, a larger correspondence effect on LRP for the go–nogo task was observed when the go–nogo block was performed second than when it was performed first, but only during the time window 0–200 ms after stimulus onset (0–100 ms time window: 0.089 vs. 0.050 μV, respectively; 100–200 ms time window: 0.530 vs. 0.139 μV, respectively). Furthermore, the correspondence effect was slightly larger in the cat-present condition than the cat-absent condition (0.569 vs. 0.490 μV, respectively) when the go–nogo block was performed second but was smaller when the go–nogo block was performed first (0.044 vs. 0.234 μV, respectively). No such pattern was observed in Experiment 2. These results seem to suggest that residual spatial response representation from the 2-choice task onto the go–nogo task affects the early stage of response activation and decay over time (see also Hommel, 1996). Thus, although response discrimination may influence the correspondence effect for the go–nogo task, our results suggest that this effect is primarily driven by a spatial reference bias generated by the salient object, as suggested by the reference coding view.
Correspondence effects with different stimulus modalities
Another notable finding of the present study is that the overall correspondence effect in the 2-choice task was larger with auditory stimuli in Experiment 1 (35 ms) than with visual stimuli in Experiment 2 (10 ms). The larger correspondence effect in Experiment 1 than in Experiment 2 is consistent with existing literature showing larger Simon effects with auditory stimuli than visual stimuli (e.g., Wascher et al., 2001). For instance, Wascher et al. had participants respond to the identity of the letter (A or B) that was presented to the left or right of the fixation cross in Experiment 1 and to the tone pitch (high vs. low) that was presented to the left or right speaker in Experiment 2. They found that a larger correspondence effect with the auditory tones (~46 ms) than with the visual letters (~25 ms). Wascher et al. concluded that the response activation produced by the irrelevant location of auditory stimuli is stronger than the irrelevant location of visual stimuli.
We should further note that the visual stimuli (i.e., a hand) in our Experiment 2 were always presented in the center of the screen. The irrelevant spatial information (left vs. right) was conveyed by the finger-pointing direction, not the hand location. In contrast, the irrelevant spatial information for the auditory tone in Experiment 1 was conveyed by the tone location (the left or right speaker). Thus, it is possible that response activation from the irrelevant object location is stronger than the activation from the irrelevant pointing direction. As suggested by Lu and Proctor (2001), the correspondence effect depends on the relative strength of relevant vs. irrelevant stimulus information in relation to the response location.
Referential coding
Both behavioral and ERP data in Experiment 1 converge to the conclusion that spatial reference to one’s response can be generated from salient, irrelevant objects. Nevertheless, the effect of spatial reference coding can only be achieved when attention is allocated to the object to some degree as can be accomplished in the auditory task of Experiment 1 but less so in the visual task of Experiment 2. However, the main questions we asked are (1) whether this task-irrelevant reference frame was weighted similarly to the task-relevant reference frame generated by one’s own alternative responses in the 2-choice task, and (2) how this task-irrelevant reference interacted with the task-relevant reference in the 2-choice task and subsequently affected one’s performance. According to Dolk et al. (2014), the referential coding account assumes that response conflict is the result of concurrent action representation rather than the source of activation. Thus, the action representation triggered by an external object should be similar to the action representation triggered by one’s own possible actions.
Since the correspondence effect on RT in the go–nogo, cat-present condition was evident only in the present Experiment 1, we, therefore, compared this condition to the 2-choice, cat-absent condition in Experiment 1. Note that the task-irrelevant reference frame is the sole contributor to the spatial coding in the former case whereas the task-relevant reference frame is the only contributor in the latter case. The t tests revealed that the correspondence effect on RT, averaged across the two task order groups, was significantly larger in the 2-choice, cat-absent condition (33 ± 8 ms) than the go–nogo, cat-present condition (13 ± 10 ms), t(23) = −3.91, p < 0.001. The effect remained to be significantly larger even including only the right response in the 2-choice, cat-absent condition (35 ± 11 ms), t(23) = −3.62, p < 0.01.
These results suggest that spatial coding generated by the task-relevant reference receives a stronger weighting in the response activation than spatial coding generated by the task-irrelevant reference. Further evidence for this conclusion is from the modulation of the object condition in the correspondence effect for the 2-choice task observed in Experiment 1. The task-irrelevant reference frame (i.e., the waving cat) was found to boost the spatial coding generated from the task-relevant reference more for the right response than the left response. The increase in the correspondence effect for the right response (13 ± 13 ms), although equivalent to the effect observed in the go–nogo, cat-present condition (13 ± 12 ms), was smaller than the size of the correspondence effect generated solely by the task-relevant-reference frame (33 ± 8 ms).
As suggested by previous studies, the impact of reference coding on action depends on the similarity in integrated events from perception and action planning (e.g., Hommel, 2004, 2009; Hommel, Müsseler, Aschersleben, & Prinz, 2001). The more similar action events are (e.g., the left and right responses vs. the left object and the right response), the more likely they are to produce similar effects in reference coding (e.g., Dolk et al., 2013a, 2014). As found in Sebanz et al. (2003), the correspondence effect on RT was similar in the 2-choice task (9 ms) and the joint go–nogo task with co-actor (11 ms) where both left and right responses were produced. Nevertheless, some researchers have also argued that the correspondence effect is contingent on attentional demands on those integrated events (e.g., Ansorge & Wühr, 2004; Hommel et al., 2001; Yamaguchi & Proctor, 2011). For instance, Hommel et al. (2001) proposed that stimulus features and their intended responses are represented in a common coding scheme, which is held in working memory. Accordingly, the task-relevant reference generated by the alternative responses that are associated with stimulus features (e.g., the left key for high tone vs. the right key for low tone) can arise and activate soon after stimulus onset since attention is prioritized to those associations. In the case with an external, irrelevant object containing no task-related features (i.e., the cat in the present study), it provides reference codes only when the task allows attention to process the irrelevant object. Thus, the task-relevant reference was more salient in attentional demands than the task-irrelevant reference, generating a much large correspondence effect (e.g., Ansorge & Wühr, 2004; Hommel et al., 2001; Yamaguchi & Proctor, 2011).
Go–nogo task vs. 2-choice task
In addition to the differences in reference coding, the conventional view assumes a response-selection stage for 2-choice tasks but not go–nogo tasks (e.g., Donders, 1969). This view nevertheless has been challenged by several researchers, arguing that the go–nogo task also requires response selection and decision making (choosing between respond and not-respond options; see Gomez, Ratcliff, & Perea, 2007; Ulrich, Mattes, & Miller, 1999). Note that even if decision making is required for the go–nogo task, the lack of uncertainty in the go-response location does not require that response to be coded spatially. As a consequence, one would not expect to observe any correspondence effect without the salient, irrelevant object in the go–nogo task, as shown in previous studies (e.g., Hommel, 1996; Shiu & Kornblum, 1999).
The present study provides some insights regarding the differences between go–nogo and 2-choice tasks. Since we focused on differences in processing stages between these two tasks themselves without contaminating any influences from irrelevant objects, we compared these two tasks when the cat was absent. The results in Experiment 1 revealed no differences in overall RT between the go–nogo task (466 ms) and 2-choice task (462 ms) in the cat-absent condition, t < 1.0, consistent with the view that response selection is involved in the go–nogo task as the 2-choice ask. Nevertheless, RT was significantly shorter for the go–nogo task (377 ms) than the 2-choice task (404 ms) in Experiment 2, t(23) = 2.09, p = 0.0481. Furthermore, both experiments revealed higher error rates for the 2-choice task (0.037 vs. 0.039 for Experiments 1 and 2, respectively) than the go–nogo task (0.004 vs. 0.001), |ts(23)| ≥ 5.33, ps < 0.0001. These results suggest that the cognitive demand for response selection/decision making is equal or even lesser for the go–nogo task than the 2-choice task, minimizing the response confusion and errors.
Conclusion
Overall, the present study expands the literature suggesting that a salient, irrelevant object can serve as a spatial reference frame relative to which people code their actions as left vs. right. Nevertheless, the presence of the correspondence effect in the go–nogo task is primarily driven by the orienting of attention to the salient, irrelevant object, which subsequently provides a spatial reference for one’s own action. When visuo-spatial attention was available and enabled processing of the salient, irrelevant object, as in the auditory task of Experiment 1, a correspondence effect on both RT and LRP was observed. With the reduced availability of visuo-spatial attention for the salient, irrelevant object, as in the visual task of Experiment 2, less of an effect was observed. We further argue that the correspondence effect also depends on similarity in action events generated from various sources of activation, which is contingent on attentional demands. Referential coding has different weightings of response activation between task-relevant and task-irrelevant references, with the former being stronger than the latter.
Notes
One reviewer raised a concern regarding the twice more “response” trials for the 2-choice task than the go–nogo trials in the data analyses. To address this concern, we conducted another analysis on RT for each experiment comparing the first half of the 2-choice task trials to the go–nogo task trials. Results were similar to the main analyses including all of the 2-choice task trials in both Experiments 1 and 2. In both experiments, the critical 3-way interaction between correspondence, task type, and object condition was not significant, Fs < 1.0. Furthermore, the correspondence effect in the 2-choice task remained unaffected by the cat condition, ts(23) ≤ 1.43, ps ≥ 0.17.
LRPs strongly depend on RTs and are determined mainly on the fast response trials (e.g., Meyer, Osman, Irwin, & Yantis, 1988). Because of the variability of RT between the auditory task in Experiment 1 and the visual task in Experiment 2, different time windows could have been used to assess LRPs. Nevertheless, we focused on the time window 100–200 ms in both experiments where the LRPs for corresponding and noncorresponding trials started to diverge. The complete summaries of LRP analyses for the consecutive 100-ms time windows from 0–400 ms after stimulus onset are reported in Appendix 2 (Experiment 1) and Appendix 4 (Experiment 2).
References
Ansorge, U., & Wühr, P. (2004). A response-discrimination account of the Simon effect. Journal of Experimental Psychology: Human Perception and Performance, 30, 365–377.
Bokura, H., Yamaguchi, S., & Kobayashi, S. (2001). Electrophysiological correlates for response inhibition in a Go/NoGo task. Clinical Neurophysiology, 112, 2224–2232.
De Jong, R., Liang, C.-C., & Lauber, E. (1994). Conditional and unconditional automaticity: a dual-process model of effects of spatial stimulus–response correspondence. Journal of Experimental Psychology: Human Perception and Performance, 20, 731–750.
De Jong, R., Wierda, M., Mulder, G., & Mulder, L. J. M. (1988). The use of partial information in response processing: a psychophysiological investigation. Journal of Experimental Psychology: Human Perception and Performance, 14, 682–692.
Dimoska, A., Johnstone, S. J., & Barry, R. J. (2006). The auditory-evoked N2 and P3 components in the stop-signal task: indices of inhibition, response-conflict or error-detection? Brain and Cognition, 62, 98–112.
Dittrich, K., Dolk, T., Rothe-Wulf, A., Klauer, K. C., & Prinz, W. (2013). Keys and seats: spatial response coding underlying the joint spatial compatibility effect. Attention, Perception, & Psychophysics, 75, 1725–1736.
Dittrich, K., Kellen, D., & Stahl, C. (2014). Analyzing distributional properties of interference effects across modalities: changes and challenges. Psychological Research, 78, 387–399.
Dittrich, K., Rothe, A., & Klauer, K. C. (2012). Increased spatial salience in the social Simon task: a response-coding account of spatial compatibility effects. Attention, Perception, & Psychophysics, 74, 911–929.
Dolk, T., Hommel, B., Colzato, L. S., Schütz-Bosbach, S., Prinz, W., & Liepelt, R. (2011). How “social” is the social Simon effect? Frontier in Psychology, 2, 84.
Dolk, T., Hommel, B., Colzato, L. S., Schütz-Bosbach, S., Prinz, W., & Liepelt, R. (2014). The joint Simon effect: a review and theoretical integration. Frontier in Psychology, 5, 974.
Dolk, T., Hommel, B., Prinz, W., & Liepelt, R. (2013a). The (not so) social Simon effect: a referential coding account. Journal of Experimental Psychology: Human Perception and Performance, 39, 1248–1260.
Dolk, T., Liepelt, R., Prinz, W., & Fiehler, K. (2013b). Visual experience determines the use of external reference frames in joint action control. PLoS ONE, 8(3), e59008.
Donders, F. C. (1969). On the speed of mental processes. Acta Psychologica, 30, 412–431.
Donkers, F. C. L., & Van Boxtel, G. J. M. (2004). The N2 in go/no-go tasks reflects conflict monitoring not response inhibition. Brain and Cognition, 56, 165–176.
Gomez, P., Ratcliff, R., & Perea, M. (2007). A model of the go/no-go task. Journal of Experimental Psychology: General, 136, 389–413.
Guagnano, D., Rusconia, E., & Umiltá, C. A. (2010). Sharing a task or sharing space? On the effect of the confederate in action coding in a detection task. Cognition, 114, 348–355.
Holländer, A., Jung, C., & Prinz, W. (2011). Covert motor activity on NoGo trials in a task sharing paradigm: evidence from the lateralized readiness potential. Experimental Brain Research, 211, 345–356.
Hommel, B. (1993). Inverting the Simon effect by intention. Psychological Research, 55, 270–279.
Hommel, B. (1996). S-R compatibility effects without response uncertainty. Quarterly Journal of Experimental Psychology, 49A, 546–571.
Hommel, B. (2004). Event files: feature binding in and across perception and action. Trends in Cognitive Science, 8, 494–500.
Hommel, B. (2009). Action control according to TEC (Theory of event coding). Psychological Research, 73, 512–526.
Hommel, B., Colzato, L. S., & van den Wildenberg, W. P. M. (2009). How social are task representations. Psychological Science, 20, 794–798.
Hommel, B., Müsseler, J., Aschersleben, G., & Prinz, W. (2001). The theory of event coding (TEC): a framework for perception and action planning. Behavioral and Brain Sciences, 24, 849–878.
Knoblich, G., & Sebanz, N. (2006). The social nature of perception and action. Current Directions in Psychological Science, 15, 99–104.
Kopp, B., Mattler, U., Goertz, R., & Rist, F. (1996). N2, P3 and the lateralised readiness potential in a nogo task involving selective response priming. Electroencephalography and Clinical Neurophysiology, 99, 19–27.
Kornblum, S., Hasbroucq, T., & Osman, A. (1990). Dimensional overlap: cognitive basis for stimulus–response compatibility—a model and taxonomy. Psychological Review, 97, 253–270.
Lamberts, K., Tavernier, G., & D’Ydewalle, G. (1992). Effects of multiple reference points in spatial stimulus–response compatibility. Acta Psychologica, 79, 115–130.
Lien, M.-C., & Proctor, R. W. (2002). Stimulus–response compatibility and psychological refractory period effects: implications for response selection. Psychonomic Bulletin & Review, 9, 212–238.
Lien, M.-C., Ruthruff, E., Hsieh, S.-L., & Yu, Y.-T. (2007). Parallel central processing between tasks: evidence from lateralized readiness potential. Psychonomic Bulletin & Review, 14, 133–141.
Liepelt, R. (2014). Interacting hands: the role of attention for the joint Simon effect. Frontiers in Psychology, 5, 1462.
Lu, C.-H., & Proctor, R. W. (1995). The influence of irrelevant location information on performance: a review of the Simon and spatial Stroop effects. Psychonomic Bulletin & Review, 2, 174–207.
Lu, C.-H., & Proctor, R. W. (2001). Influence of irrelevant information on human performance: effects of S-R association strength and relative timing. Quarterly Journal of Experimental Psychology, 54A, 95–136.
Masaki, H., Wild-Wall, N., Sanglas, J., & Sommer, W. (2004). The functional locus of the lateralized readiness potential. Psychophysiology, 41, 220–230.
Memelink, J., & Hommel, B. (2013). Intentional weighting: a basic principle in cognitive control. Psychological Research, 77, 249–259.
Meyer, O. W., Osman, A. M., Irwin, O. E., & Yantis, S. (1988). Modern mental chronometry. Biological Psychology, 26, 3–67.
Miller, J., Coles, M. G. H., & Chakraborty, S. (1996). Dissociation between behavioral and psychophysiological measures of response preparation. Acta Psychologica, 94, 189–208.
Miller, J., & Hackley, S. A. (1992). Electrophysiological evidence for temporal overlap among contingent mental processes. Journal of Experimental Psychology: General, 121, 195–209.
Neumann, O., van der Heijden, A. H. C., & Allport, D. A. (1986). Visual selective attention: introductory remarks. Psychological Research, 48, 185–188.
Nicoletti, R., & Umiltá, C. (1989a). Splitting visual space with attention. Journal of Experimental Psychology: Human Perception and Performance, 15, 164–169.
Nicoletti, R., & Umiltá, C. (1989b). Attention shifts produce spatial stimulus codes. Psychological Research, 56, 144–150.
Praamstra, P. (2007). Do’s and don’ts with lateralized event-related brain potentials. Journal of Experimental Psychology: Human Perception and Performance, 33, 497–502.
Proctor, R. W., & Shao, C. (2010). Does the contribution of stimulus-hand correspondence to the auditory Simon effect increase with practice? Experimental Brain Research, 204, 131–137.
Proctor, R. W., & Vu, K.-P. L. (2006). Stimulus–response compatibility principles: Data, theory, and application. Boca Raton: CRC Press.
Reeve, T. G., & Proctor, R. W. (1988). Determinants of two-choice reaction-time patterns for same-hand and different-hand finger pairings. Journal of Motor Behavior, 20, 317–340.
Roberts, L. E., Rau, H., Lutzenberger, W., & Birbaumer, N. (1994). Mapping P300 waves onto inhibition: Go/No-Go discrimination. Electroencephalography and Clinical Neurophysiology, 92, 44–55.
Sebanz, N., & Knoblich, G. (2009). Prediction in joint action: what, when, and where. Topics in Cognitive Science, 1, 353–367.
Sebanz, N., Knoblich, G., & Prinz, W. (2003). Representing others’ actions: just like one’s own? Cognition, 88, B11–B21.
Sebanz, N., Knoblich, G., & Prinz, W. (2005). How to share a task: co-representing stimulus–response mapping. Journal of Experimental Psychology: Human Perception and Performance, 31, 1234–1246.
Sebanz, N., Knoblich, G., Prinz, W., & Wascher, E. (2006). Twin peaks: an ERP study of action planning and control in coacting individuals. Journal of Cognitive Neuroscience, 18, 859–870.
Shiu, L.-P., & Kornblum, S. (1999). Stimulus–response compatibility effects in go–no-go tasks: a dimensional overlap account. Perception and Psychophysics, 61, 1613–1623.
Simon, J. R. (1990). The effects of an irrelevant directional cue on human information processing. In R. W. Proctor & T. G. Reeve (Eds.), Stimulus–response compatibility: An integrated perspective (pp. 31–86). Amsterdam: North-Holland.
Simon, J. R., & Rudell, A. P. (1967). Auditory S-R compatibility: the effect of an irrelevant cue on information processing. Journal of Applied Psychology, 51, 300–304.
Smith, J. L., Johnstone, S. J., & Barry, R. J. (2007). Response priming in the Go/NoGo task: the N2 reflects neither inhibition nor conflict. Clinical Neurophysiology, 118, 343–355.
Smith, J. L., Smith, E. A., Provost, A. L., & Healthcote, A. (2010). Sequence effects support the conflict theory of N2 and P3 in the Go/Nogo task. International Journal of Psychophysiology, 75, 217–218.
Stoffer, T. H. (1991). Attentional zooming and spatial S-R compatibility. Psychological Research, 53, 127–135.
Tsai, C.-C., Kuo, W.-J., Jing, J.-T., Hung, D. L., & Tzeng, O. J.-L. (2006). A common coding framework in self-other interaction: evidence from joint action task. Experimental Brain Research, 175, 353–362.
Ulrich, R., Mattes, S., & Miller, J. O. (1999). Doners’s assumption of pure insertion: an evaluation on the basis of response dynamics. Acta Psychologica, 102, 43–75.
Valle-Inclán, F. (1996). The locus of interference in the Simon effect: an ERP study. Biological Psycholology, 43, 147–162.
Wascher, E., Schatz, U., Kuder, T., & Verleger, R. (2001). Validity and boundary conditions of automatic response activation in the Simon task. Journal of Experimental Psychology: Human Perception and Performance, 27, 731–751.
Xiong, A., & Proctor, R. W. (2015). Referential coding of steering-wheel button presses in a simulated driving cockpit. Journal of Experimental Psychology: Applied (in press).
Yamaguchi, M., & Proctor, R. W. (2011). The Simon task with multi-component responses: two loci of response-effect compatibility. Psychological Research, 75, 214–226.
Yamaguchi, M., & Proctor, R. W. (2012). Multidimensional vector model of stimulus–response compatibility. Psychological Review, 119, 272–303.
Acknowledgments
We thank Wilfried Kunde, Eric Ruthruff, and two anonymous reviewers for comments on earlier versions of the manuscript. We also thank Andrew Morgan for technical support.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
A summary table for ANOVAs on the mean response time (RT) and proportion of error (PE) as a function of task order (go–nogo task first and 2-choice task second vs. 2-choice task first and go–nogo task second), task type (go–nogo task vs. 2-choice task), object condition (present vs. absent), and correspondence between response location and tone location (corresponding vs. noncorresponding) in Experiment 1
Effect | df | RT | PE | ||||
|---|---|---|---|---|---|---|---|
F | p | η 2 p | F | p | η 2 p | ||
Ord | 1,22 | <1.0 | – | – | <1.0 | – | – |
Task | 1,22 | <1.0 | – | – | 35.41 | <0.0001 | 0.62 |
Obj | 1,22 | <1.0 | – | – | <1.0 | – | – |
Corr | 1,22 | 45.20 | <0.0001 | 0.67 | 30.12 | <0.0001 | 0.58 |
Ord × Task | 1,22 | <1.0 | – | – | <1.0 | – | – |
Ord × Obj | 1,22 | 4.05 | 0.06 | 0.16 | <1.0 | – | – |
Ord × Corr | 1,22 | <1.0 | – | – | <1.0 | – | – |
Task × Obj | 1,22 | <1.0 | – | – | <1.0 | – | – |
Task × Corr | 1,22 | 48.82 | <0.0001 | 0.69 | 37.22 | <0.0001 | 0.63 |
Obj × Corr | 1,22 | 5.85 | <0.05 | 0.21 | 1.08 | 0.31 | 0.05 |
Ord × Task × Obj | 1,22 | 3.13 | 0.09 | 0.12 | <1.0 | – | – |
Ord × Task × Corr | 1,22 | <1.0 | – | – | <1.0 | – | – |
Ord × Obj × Corr | 1,22 | 1.0 | 0.33 | 0.04 | 1.03 | 0.32 | 0.04 |
Task × Obj × Corr | 1,22 | <1.0 | – | – | 3.15 | 0.09 | 0.13 |
Ord × Task × Obj × Corr | 1,22 | <1.0 | – | – | <1.0 | – | – |
Appendix 2
A summary table for ANOVAs on the average LRP as a function of task order (go–nogo task first and 2-choice task second vs. 2-choice task first and go–nogo task second), task type (go–nogo task vs. 2-choice task), object condition (present vs. absent), and correspondence between response location and tone location (corresponding vs. noncorresponding) for the four consecutive 100-ms time windows from 0 to 400 ms after stimulus onset in Experiment 1
Effect | df | 0–100 ms | 100–200 ms | 200–300 ms | 300–400 ms | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
F | p | η 2 p | F | p | η 2 p | F | p | η 2 p | F | p | η 2 p | ||
Ord | 1,22 | 1.08 | 0.31 | 0.05 | <1.0 | – | – | 3.40 | 0.08 | 0.13 | 4.25 | 0.05 | 0.16 |
Task | 1,22 | <1.0 | – | – | <1.0 | – | – | 4.81 | <0.05 | 0.18 | <1.0 | – | – |
Obj | 1,22 | <1.0 | – | – | 2.15 | 0.16 | 0.09 | 3.16 | 0.09 | 0.50 | 3.55 | 0.07 | 0.14 |
Corr | 1,22 | <1.0 | – | – | 7.74 | <0.05 | 0.26 | 16.05 | <0.001 | 0.42 | 46.77 | <0.0001 | 0.68 |
Ord × Task | 1,22 | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – | 1.18 | 0.29 | 0.05 |
Ord × Obj | 1,22 | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – |
Ord × Corr | 1,22 | 2.44 | 0.13 | 0.10 | <1.0 | – | – | 2.16 | 0.16 | 0.09 | <1.0 | – | – |
Task × Obj | 1,22 | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – |
Task × Corr | 1,22 | 3.46 | 0.08 | 0.14 | 1.37 | 0.25 | 0.06 | 2.01 | 0.17 | 0.08 | 2.33 | 0.14 | 0.10 |
Obj × Corr | 1,22 | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – |
Ord × Task × Obj | 1,22 | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – |
Ord × Task × Corr | 1,22 | 1.10 | 0.31 | 0.05 | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – |
Ord × Obj × Corr | 1,22 | <1.0 | – | – | 1.30 | 0.27 | 0.06 | <1.0 | – | – | <1.0 | – | – |
Task × Obj × Corr | 1,22 | <1.0 | – | – | <1.0 | – | – | 2.41 | 0.13 | 0.10 | 1.53 | 0.23 | 0.07 |
Ord × Task × Obj × Corr | 1,22 | <1.0 | – | – | 4.17 | 0.05 | 0.16 | 2.56 | 0.12 | 0.10 | 2.35 | 0.14 | 0.10 |
Appendix 3
A summary table for ANOVAs on the mean response time (RT) and proportion of error (PE) as a function of task order (go–nogo task first and 2-choice task second vs. 2-choice task first and go–nogo task second), task type (go–nogo task vs. 2-choice task), object condition (present vs. absent), and correspondence between response location and hand-pointing direction (neutral, corresponding, vs. noncorresponding) in Experiment 2
Effect | df | RT | PE | ||||
|---|---|---|---|---|---|---|---|
F | p | η 2 p | F | p | η 2 p | ||
Ord | 1,22 | <1.0 | – | – | <1.0 | – | – |
Task | 1,22 | 8.98 | <0.01 | 0.29 | 35.19 | <0.0001 | 0.62 |
Obj | 1,22 | <1.0 | – | – | <1.0 | – | – |
Corr | 2,44 | 4.38 | <0.05 | 0.17 | 3.72 | <0.05 | 0.14 |
Ord × Task | 1,22 | <1.0 | – | – | <1.0 | – | – |
Ord × Obj | 1,22 | <1.0 | – | – | 2.80 | 0.11 | 0.11 |
Ord × Corr | 2,44 | <1.0 | – | – | 1.75 | 0.19 | 0.07 |
Task × Obj | 1,22 | 1.34 | 0.26 | 0.06 | <1.0 | – | – |
Task × Corr | 2,44 | 1.90 | <0.05 | 0.18 | 2.02 | 0.15 | 0.08 |
Obj × Corr | 2,44 | <1.0 | – | – | 1.32 | 0.27 | 0.06 |
Ord × Task × Obj | 1,22 | <1.0 | – | – | 1.83 | 0.19 | 0.08 |
Ord × Task × Corr | 2,44 | <1.0 | – | – | <1.0 | – | – |
Ord × Obj × Corr | 2,44 | 1.19 | 0.31 | 0.05 | <1.0 | – | – |
Task × Obj × Corr | 2,44 | 1.49 | 0.24 | 0.06 | 1.54 | 0.23 | 0.07 |
Ord × Task × Obj × Corr | 2,44 | <1.0 | – | – | <1.0 | – | – |
Appendix 4
A summary table for ANOVAs on the average LRP as a function of task order (go–nogo task first and 2-choice task second vs. 2-choice task first and go–nogo task second), task type (go–nogo task vs. 2-choice task), object condition (present vs. absent), and correspondence between response location and hand-pointing direction (neutral, corresponding, vs. noncorresponding) for the four consecutive 100-ms time windows from 0 to 400 ms after stimulus onset in Experiment 2
Effect | df | 0–100 ms | 100–200 ms | 200–300 ms | 300–400 ms | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
F | p | η 2 p | F | p | η 2 p | F | p | η 2 p | F | p | η 2 p | ||
Ord | 1,22 | 1.70 | 0.21 | 0.07 | 4.45 | <0.05 | 0.17 | <1.0 | – | – | <1.0 | – | – |
Task | 1,22 | <1.0 | – | – | <1.0 | – | – | 4.69 | <0.05 | 0.18 | <1.0 | – | – |
Obj | 1,22 | <1.0 | – | – | <1.0 | – | – | 1.35 | 0.26 | 0.06 | <1.0 | – | – |
Corr | 2,44 | 2.02 | 0.15 | 0.08 | 20.14 | <0.0001 | 0.48 | 1.40 | 0.26 | 0.06 | <1.0 | – | – |
Ord × Task | 1,22 | <1.0 | – | – | 2.77 | 0.11 | 0.11 | 4.37 | <0.05 | 0.17 | <1.0 | – | – |
Ord × Obj | 1,22 | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – |
Ord × Corr | 2,44 | 2.03 | 0.15 | 0.08 | 8.06 | <0.001 | 0.27 | <1.0 | – | – | 1.01 | 0.37 | 0.04 |
Task × Obj | 1,22 | <1.0 | – | – | 3.05 | 0.09 | 0.12 | <1.0 | – | – | <1.0 | – | – |
Task × Corr | 2,44 | <1.0 | – | – | 1.64 | 0.21 | 0.07 | 7.58 | <0.01 | 0.26 | <1.0 | – | – |
Obj × Corr | 2,44 | <1.0 | – | – | 1.64 | 0.21 | 0.07 | <1.0 | – | – | <1.0 | – | – |
Ord × Task × Obj | 1,22 | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – | 2.21 | 0.15 | 0.09 |
Ord × Task × Corr | 2,44 | <1.0 | – | – | 1.28 | 0.29 | 0.06 | <1.0 | – | – | <1.0 | – | – |
Ord × Obj × Corr | 2,44 | <1.0 | – | – | 2.67 | 0.09 | 0.11 | 3.10 | 0.06 | 0.12 | 1.41 | 0.25 | 0.06 |
Task × Obj × Corr | 2,44 | <1.0 | – | – | <1.0 | – | – | <1.0 | – | – | 4.20 | <0.05 | 0.16 |
Ord × Task × Obj × Corr | 2,44 | 3.47 | <0.05 | 0.14 | 4.15 | <0.05 | 0.16 | 1.0 | 0.38 | 0.04 | 1.38 | 0.26 | 0.06 |
Rights and permissions
About this article

Cite this article
Lien, MC., Pedersen, L. & Proctor, R.W. Stimulus–response correspondence in go–nogo and choice tasks: Are reactions altered by the presence of an irrelevant salient object?. Psychological Research 80, 912–934 (2016). https://doi.org/10.1007/s00426-015-0699-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00426-015-0699-0