
Abstract
Aim
To determine whether load directions for stumbling are similar to those for common activities and whether stumbling can be realistically simulated under laboratory conditions without endangering the patients.
Method
The magnitudes and directions of hip contact forces were measured during real and simulated stumbling and compared with those found during various other everyday activities. Measurements were obtained by use of hip implants with built-in load sensors and telemetry.
Results
Peak forces are approximately twice as high during real stumbling as during any other activity and may range higher than eight-times the body weight. Simulated stumbling leads to much lower contact forces, especially if this happens after a warning. Accidental stumbling in everyday situations should, therefore, be avoided, especially in patients with hip replacements or arthrosis.
Conclusions
The directions of peak hip contact forces relative to the femoral bone are nearly constant for any activity, including real stumbling. This observation supports the assumption that muscle and bone anatomy plus muscle function are optimized in order to minimize stresses in bone and muscles. Any impairment of such a mechanically balanced system will increase the musculoskeletal loads. Malposition of total hip implants or muscle deficits caused by the surgical approach must, therefore, be avoided or minimized.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The magnitudes and directions of contact forces acting at the hip joint influence the healing of femoral and pelvic fractures, the fixation stability of total hip implants and the risk of arthrosis. Fractures require a reduction to only partial load bearing during the first months of healing. It is the common opinion that patients with total hip replacement should avoid activities that cause very high hip contact forces and that the force directions are also important, since the torsional stability of implants may be critical [1, 2].
Early in vivo data on contact forces in the hip joint were obtained via instrumented implants [3, 4] in only a few patients and time points shortly after implantation. Improved electronics and a long-term research project then enabled the measurement of activity-dependent magnitudes and directions of hip contact forces over approximately 200 hours with nine instrumented total hip implants [5, 6, 7, 8] in seven patients for up to 9 years after surgery. Data were transmitted by telemetry and recorded together with video images of the patients. Force magnitudes and directions were fully evaluated for the influence of various activities such as slow jogging and stumbling [9], stair walking [1], and weight carrying [10], as well as for the effect of factors such as shoe and floor material [11]. Detailed data from four patients plus an average patient, recorded during the most common daily activities, were published [12], together with patient videos and complete gait analyses on a compact disc [13]. This database also contained muscle forces calculated during walking and stair climbing [14].
Two of the most interesting findings were: (A) the extremely high forces for ‘uncontrolled’ stumbling that exceeded by far those measured for any other activity [9] and (B) the nearly invariable directions of high contact forces relative to the femur recorded during all ‘controlled’ activities.
The aim of this study was to determine (A) whether load directions for stumbling are similar to those for common activities and (B) whether stumbling can be realistically simulated under laboratory conditions without endangering the patients. Thus, real stumbling, previously observed in two patients, was analyzed with regard to the force directions, and stumbling events were provoked in another patient by sudden destabilization of walking or standing.
Material and methods
Two types of total hip implants were equipped with built-in load sensors, multichannel telemetry and an external inductive power supply [6, 7]. Nine instrumented prostheses were implanted in seven patients. The three spatial components and resultant hip contact force were measured at a rate of 200 Hz, with an accuracy of 1 to 2%. Resultant forces and their directions relative to the femur could be monitored immediately on a PC or evaluated later in detail by use of videotapes with synchronously recorded patient images and telemetry data.
Stumbling was recorded by chance in two patients [12]: (A) patient EBL attempted to climb stairs quickly 4 months postoperatively (mpo) and stumbled when missing the first step but used the handrails and did not fall; (B) patient JB stumbled across a cable lying on the floor 18 mpo but kept balance by taking three quick steps forwards. Patient JB had generally higher contact force levels than EBL or any other patient. Their load levels were most probably increased by the slightly disturbed gait patterns resulting from muscular deficits. Neither of the real stumbling events led to an accident or fall. A similar situation may arise in many patients with total hip implants, especially during the first postoperative months when walking is still unsafe.
To investigate stumbling in more detail, we used three test setups in patient HSR (10 mpo), who had an instrumented implant at the right hip joint.
- A:
-
The patient stood with each leg on a separate 30×30-cm-wide plywood plate supported by loose blocks 5 cm high. One side of the right platform was suddenly pulled away by hand with a string. This experiment was performed in two ways: (1) with the patient aware that the support was being removed and (2) without warning. Assistants stood close to the patient to prevent him from falling.
- B:
-
The experiment with and without the patient’s visual control was repeated during the patient’s one-legged stance on one platform.
- C:
-
The patient walked on a treadmill at 3.5 km/h, and the treadmill was stopped rapidly without warning. He was protected against falling by a belt around his chest.
The implantation of instrumented hip endoprostheses was approved by the Ethics Committee of the Free University of Berlin. The procedure was explained to the patients before surgery. They gave their written consent to implantation, subsequent measurements and publication of their names and images.
Results
Figure 1 shows real stumbling observed in patient EBL. The maximum resultant force was approximately 290% of body weight (BW) during normal walking (Fig. 1a, step 1) but rose to 720%BW during stumbling (step 3). The display of force vectors shows the force directions relative to the femur (Fig. 1b, c). The total range of force directions is very similar for walking and stumbling, and the directions of peak forces are nearly identical in both cases. The directions vary more for low than for high forces.

a Hip contact forces in patient EBL during stumbling. Force scale in percent of body weight (%BW). Step 1: walking on level ground. Steps 2–4: stumbling without falling. Step 5: normal step. Thick line resultant force, thin lines components in three different directions. Adapted from [9]. b, c Force vectors in three planes from measurements in part a. Left sagittal plane, right frontal plane, bottom horizontal plane perpendicular to the long axis of the femur. b Walking (step 1), scale +z = 300%BW. c Stumbling (step 3), scale +z = 800%BW
Though JB had generally higher force levels than EBL and all other patients, similar observations were made when JB stumbled. The contact force reached approximately 400%BW during walking (Fig. 2a, b, step 1). Stumbling led to a peak value of 870%BW (Fig. 2a, c, step 4). When the contact force dropped to 350%BW and 430%BW between steps 2, 3 and 4, the patient’s foot had no floor contact on the side that was being investigated. This patient showed a slightly greater difference in force directions between walking and stumbling than EBL. Maximum forces in the sagittal and transverse plane were directed approximately 10° further backwards during stumbling than during walking.

a Hip contact forces in patient JB during stumbling. Step 1: walking on level ground. Steps 2–4: stumbling without falling. Step 5: normal step. Adapted from [9]. b Force vectors during walking (step1), scale +z = 450%BW. c Force vectors during stumbling (step 4), scale +z = 900%BW
When patient HSR stood on both legs and suddenly had the right-hand support removed without warning, the right hip contact force rose from 100%BW to 340%BW. When the patient was warned that the support was being pulled away, the force reached only 200%BW. The patient’s standing on one leg while the support was suddenly removed without warning caused the contact force to rise from 260 to 395%BW (Fig. 3). When the patient was warned, the peak force reached only 340%BW. The stopping of the treadmill suddenly without warning led to maximum forces of 270–300%BW, compared to peak forces of 225%BW during normal walking (Fig. 4).

a Patient HSR standing on one leg. Contact force at right hip joint: 250%BW. Peak force while keeping balance after sudden removal of support without warning: 395%BW. b Force vectors during standing, scale +z = 300%BW. c Force vectors during stumbling, scale +z = 400%BW

a Patient HSR walking on a treadmill at 3.5 km/h with a peak contact force of 220%BW. Peak force while keeping balance after sudden stopping of the treadmill without warning (2.3 s in diagram): 300%BW. b Force vectors during the first normal step, scale +z = 250%BW. c Force vectors during stumbling, scale +z = 300%BW
EBL and JB really lost balance when stumbling and had to take some steps to keep from falling, whereas HSR never completely lost balance. He kept his upper body nearly upright during all tests, and no help was required from assistants to prevent him from falling.
Discussion
The aim of this study was to determine whether the directions of hip contact forces relative to the femur during ‘uncontrolled’ stumbling are similar to those during other activities and whether stumbling can be realistically simulated without endangering patients. The conclusions that can safely be drawn from the reported data are limited because real, sudden, stumbling was observed only twice, though the effects were similar in patients EBL and JB. The additional measurements under controlled conditions were taken in only one patient (HSR).
The upright position of HSR’s upper body during simulated stumbling, and the much lower force levels than in EBL or JB, suggest that the chosen test setups do not simulate stumbling in a realistic way. Nevertheless, some interesting data were obtained in these experiments.
The loss of safe floor contact or the stopping of the treadmill increased the hip contact forces, when compared to regular standing or walking. The loss of balance without warning in the one-legged stance caused the peak force to rise by approximately 52%. It was 240% higher during the two-legged stance and increased by up to 34% when the treadmill was halted. When the patient was aware of the impending lost of support, the force increase was lower than without warning. These observations support the assumption that extremely high contact forces act only if stumbling is absolutely unexpected. In this context it seems interesting that none of the patients had hip contact forces exceeding 200%BW during maximum isometric contractions of the joint in supine positions, typical values being 150%BW. Obviously, strong co-contractions are inhibited in this situation. The reflex mechanism triggered by sudden stumbling, however, obviously activates all muscles to their maximum extent to stabilize the joint by increasing resistance against moments due to higher friction in the joint and the stiff muscle mantle surrounding it. This would mean that the contact forces could even be more than eight to nine times the body weight in physically fit younger subjects.
The finding that directions vary only slightly for high forces but more markedly for low ones, as described here for stumbling, was also observed in all other patients during very different activities. The directions of peak forces were nearly invariable in individual patients during walking, knee bends, bending the upper body while standing, going upstairs, and lifting a straight leg in any lying position, to give some examples.
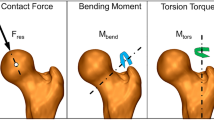
From Wolff’s law of bone remodelling [15] and many observations on fracture healing, joint implant fixation and osteoporosis, it is known that bone adapts to mechanical loading on both a microscopic and anatomic scale. The always limited range of force directions relative to the femur makes sense in that context. Forces directed more parallel to the long axis of the femur in the frontal plane would decrease the load-transmitting cartilage area, thus increasing adjacent bone stresses and pressure in the joint. Furthermore, the lever arm of the contact force would increase relative to these locations and lead to higher bending of the femoral neck and proximal shaft. More horizontal force directions, on the other hand, would increase bending of the distal femur.
In most patients and for most activities, the angle of high contact forces acting in the transverse plane was similar to the normal anteversion angle of approximately 15°. This keeps bending and stresses in the femoral neck at a low level in natural bone. In the case of a hip implant, loading in the anteversion plane minimizes the critical torsion around the implant stem and, thus, the risk of implant loosening. Surgeons are therefore advised to choose the anteversion angle of total hip implants carefully and to attempt a reconstruction of individual pre-operative values. The bone and muscle anatomy can thus best be balanced with the muscle functions.
Our findings regarding the nearly invariable directions of high contact forces at the hip joint support the assumption that bone morphology, muscle orientations and muscle functions form a mechanically well-balanced system in healthy subjects. This balance minimizes the loads acting in muscles and bones. If genetic predisposition is discounted, this system is determined and regulated by bone remodelling and, probably, by optimized muscle innervation. Any impairment of such a mechanically optimized system due to muscle dysfunctions, surgical interventions, or malpositioned fractures or joint implants will increase the loads acting in the adjacent muscles and bones.
Conclusions
Unexpected, severe stumbling leads to extremely high contact forces in the hip joint. A slight loss of balance causes lower joint loads, especially if there is some forewarning. Safe walking is therefore essential. This is particularly true for patients with uncemented hip implants during the first few postoperative months of bone ingrowth into porous implant surfaces and also for patients with hip arthrosis.
Interventions and impairments in the musculoskeletal system of a patient who walks normally can increase the loads in bone, muscles and implants. Load-increasing factors include muscular deficits caused by the surgical approach, changes in joint geometry relating to hip implants, or malposition of healing fractures. Higher loads acting on the bone or implant will then increase the risk of implant loosening or fracture non-union.
References
Bergmann G, Graichen F, Rohlmann A (1995) Is staircase walking a risk for the fixation of hip implants? J Biomech 28:535–553
Heller M, Bergmann G, Deuretzbacher G, Claes L, Haas NP, Duda GN (2001) Influence of femoral anteversion on proximal femoral loading: measurement and simulation in four patients. Clin Biomech 16:644–649
Rydell NW (1966) Forces acting in the femoral head-prosthesis. Acta Orthop Scand 7 [Suppl 88]
Davy DT, Kotzar GM, Brown RH, Heiple KGSR, Goldberg VM, Heiple KG Jr, Berilla J, Burstein AH (1988) Telemetric force measurements across the hip after total arthroplasty. J Bone Joint Surg 70-A:45–50
Bergmann G, Graichen F, Siraky J, Jendrzynski H, Rohlmann A (1988) Multichannel strain gauge telemetry for orthopaedic implants. J Biomech 21:169–176
Graichen F, Bergmann G, Rohlmann A (1999) Hip endoprosthesis for in vivo measurement of joint force and temperature. J Biomech 32:1113–1117
Graichen F, Bergmann G (1991) Four-channel telemetry system for in vivo measurement of hip joint forces. J Biomed Engineering 13:370–374
Bergmann G, Graichen F, Rohlmann A (1998) Loads acting at the hip joint. In: Sedel L, Cabanela ME (eds) Hip surgery—new materials and developments. Dunitz, London, pp 1–8
Bergmann G, Graichen F, Rohlmann A (1993) Hip joint forces during walking and running, measured in two patients. J Biomech 26:969–990
Bergmann G, Graichen F, Rohlmann A (1997) Hip joint forces during load carrying. Clin Orthop 335:190–201
Bergmann G, Kniggendorf H, Graichen F, Rohlmann A (1995) Influence of shoes and heel strike on the loading of hip implants. J Biomech 28:817–827
Bergmann G, Graichen F, Rohlmann A (2001) Hip contact forces and gait patterns from routine activities. J Biomech 34:859–871
Bergmann G (ed) (2001) HIP98—Loading of the hip joint. Free University of Berlin. Compact disc, ISBN 3980784800
Heller M, Bergmann G, Deuretzbacher G, Dürselen L, Pohl M, Claes L, Duda GN (2001) Musculo-skeletal loading conditions during walking and stair climbing. J Biomech 34:883–893
Wolff J (1892) Das Gesetz der Transformation der Knochen. Hirschwald, Berlin
Acknowledgements
This study was supported by the German Research Foundation (BE 804-11).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Bergmann, G., Graichen, F. & Rohlmann, A. Hip joint contact forces during stumbling. Langenbecks Arch Surg 389, 53–59 (2004). https://doi.org/10.1007/s00423-003-0434-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00423-003-0434-y