
Abstract
Purpose
In running, body weight reduction is reported to result in decreased lower limb muscle activity with no change in the global activation pattern (Liebenberg et al. in J Sports Sci 29:207–214). Our study examined the acute effects on running mechanics and lower limb muscle activity of short-term unweighing and reloading conditions while running on a treadmill with a lower body positive pressure (LBPP) device.
Method
Eleven healthy males performed two randomized running series of 9 min at preferred speed. Each series included three successive running conditions of 3 min [at 100 % body weight (BW), 60 or 80 % BW, and 100 % BW]. Vertical ground reaction force and center of mass accelerations were analyzed together with surface EMG activity recorded from six major muscles of the left lower limb for the first and last 30 s of each running condition. Effort sensation and mean heart rate were also recorded.
Result
In both running series, the unloaded running pattern was characterized by a lower step frequency (due to increased flight time with no change in contact time), lower impact and active force peaks, and also by reduced loading rate and push-off impulse. Amplitude of muscle activity overall decreased, but pre-contact and braking phase extensor muscle activity did not change, whereas it was reduced during the subsequent push-off phase.
Conclusion
The combined neuro-mechanical changes suggest that LBPP technology provides runners with an efficient support during the stride. The after-effects recorded after reloading highlight the fact that 3 min of unweighing may be sufficient for updating the running pattern.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
At normal gravity, running is well known as a natural but complex form of ground locomotion. It is defined as a stretch-shortening cycle (SSC) type exercise, in which most of lower limb extensor muscles are preactivated prior to ground impact. As compared to pure concentric muscle actions, the recoil of the elastic energy from the pre-stretched muscle–tendon units during the braking phase improves the SSC push-off phase (Ishikawa and Komi 2008). At submaximal running speed, the impact loads are usually varying from two to four times body weight. Stretch reflexes are reported as one constitutive factor for appropriate leg stiffness regulation and transfer of elastic energy between braking and push-off phases (Cronin et al. 2011). The SSC pattern is considered as optimized when the EMG activity of lower limb extensors is elevated during the braking phase, but low during the push-off (Komi and Nicol 2008).
To assist people who cannot yet walk and run safely at full body weight after joint and muscle injury and/or surgery, unweighing treadmill devices among which lower body positive pressure (LBPP) technology have been recently used in rehabilitation to restore gait patterns. The LBPP technology is reported to attenuate the mechanical discomfort and blood flow issues previously reported with the use of harness while walking or running for a long period on a treadmill (Grabowski and Kram 2008). As compared to the harness device, the LBPP helps maintaining correct trunk posture and results in a kinematic gait pattern closer to the normal one (Donelan and Kram 2000; Grabowski 2010). However, in contrast to the hypo-gravity condition tested in parabolic flight experiments, the lower limb motion on unweighing treadmill devices is still ruled by earth gravity (De Witt et al. 2010). Although this may affect the synchronization between limb segments (Grabowski and Kram 2008; Taube et al. 2012), it is considered as limited in running where the swing movements are essentially driven by muscular forces (Gosseye and Heglund 2010).
Most of the LBPP studies have examined the influence of unweighing on walking kinetics and energetics, showing lower vertical force peaks and knee forces, as well as reduced metabolic power (Grabowski 2010; Patil et al. 2013). However, a comparison of walking and running results demonstrated that reduced gravity has different effects on the mechanics of each gait (Donelan and Kram 2000). When using the linear mass-spring model of the body and leg (McMahon and Cheng 1990), He et al. (1991) found that this model would account for many of the unweighing-induced changes during running. Good predictions were obtained for the decrease in peak force, but this model overpredicted the changes in contact time and underpredicted the changes in stride frequency. Although not performed on LBPP type treadmill, the study of Chang et al. (2000) is of particular interest as it revealed a rather limited influence of gravity on the contact time and proportional changes in both vertical and horizontal forces.
Unexpectedly, the effects of unweighing on muscle activity have not been much investigated. Although clear reductions in lower limb muscle activities have been reported (Liebenberg et al. 2011; Hunter et al. 2014), none of these studies examined the exact phase of the running pattern in which the EMG changes occurred. In the absence of change observed in the global activation patterns, it was then suggested that any unweighing condition (from 60 to 90 % BW) could be used to maintain a specific activation pattern (Liebenberg et al. 2011). Depending on the SSC task and condition, however, a variety of central and peripheral neural adjustments may be involved in the interaction between “feedforward” and “feedback” control mechanisms (Taube et al. 2012). At normal gravity, but under varied internal and external constraints, centrally programmed and reflex neural components have been repeatedly demonstrated to remain both flexible and efficient (Ferris et al. 1998; Komi and Nicol 2008; Taube et al. 2012; Taylor et al. 2008). In unweighing testing conditions, only two SSC studies detailed the changes in the lower limb muscle activities (Avela et al. 1994, 1996). Although the SSC task used by both of these studies consisted of a maximal drop jump that differs from the running task, EMG reductions were found to be restricted to the preactivation and braking phases. These observations give support to the need for more detailed and parallel analyses of the unweighing-induced changes in muscle activity and running mechanics.
Also, interestingly, the study of Avela et al. (1994) reported similar central and reflex neural changes when the drop jump task was performed at g − 20 and g + 20 %. This result was attributed to the unexpected aspect of the tested gravity condition. For the testing protocols used on LBBP treadmill, it is still unclear which of the unweighing vs. reloading running condition (once returned to normal body weight) would be the most unexpected condition for the subjects. This suggests that gait and EMG patterns should be studied before their stabilization, i.e., before the 4 to 5 min time delay that has usually been used by earlier treadmill running studies (Lavcanska et al. 2005; Divert et al. 2005).
The present study aimed to assess the acute adjustments of the running pattern to short-term unweighing and reloading, with special emphasis on the neural and ground reaction force changes while running at a given preferred speed. The first hypothesis was that the SSC function would be initially deteriorated in the unweighing condition. The second hypothesis was that the changes in lower limb muscle activity to both unweighing and reloading would be SSC phase dependent.
Materials and methods
Subjects
Nine healthy adults volunteered for this study. However, only seven bilateral rearfoot-strike runners (age 21.7 ± 3.6 years, height 172.5 ± 5.7 cm, mass 64.6 ± 7.5 kg) were selected, based on the reported differences in muscle activation between rear- and forefoot strikers (e.g., Shih et al. 2013). Each of them signed a consent agreement. The ethics committee of Aix-Marseille University approved this study and it conforms to the provisions of the Declaration of Helsinki.
Protocol
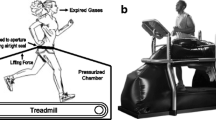
The subjects ran at their preferred speed (2.48 ± 0.17 m s−1) on an instrumented treadmill (M310 Anti-gravity Treadmill®, AlterG Inc., Fremont, CA), which allowed them to either run at 100 % body weight (100BW) or in unweighing conditions at 80 % body weight (80BW) and 60 % body weight (60BW) (Fig. 1). Similarly to the harness suspension systems, the AlterG device applies a consistent and substantial lifting force via a LBPP device that includes an airtight chamber applied distally to the subject’s iliac crest. This creates unweighing but at the waist, only, so that the limbs still experience earth gravity (Donelan and Kram 2000). Before the testing protocol, a calibration is performed while the subject is standing on the treadmill to adjust the chamber pressure. To allow the subjects to get used to these specific treadmill-running conditions, a 15 min familiarization run was performed at 100BW 1–2 days prior to the testing protocol. All subjects wore flexible neoprene shorts with a waist seal zipped to the chamber and the same flat-soled gymnastic shoes.

The LBPP device (a) and its schematic description (b). The LBPP device produces a vertical lifting force that varies to allow running at either normal body weight or in unweighing conditions
The testing protocol (Fig. 2) started with a 5 min warm-up period to determine the individual preferred running speed at 100BW and was followed by two running series of 9 min. Each running series included three successive conditions of 3 min, with the first and last conditions performed at 100BW, and the intermediate unweighing condition (UNW at either 60BW or 80BW). The order of the 60BW and 80BW series was randomized among runners. The unweighing and reloading transition phases in between running conditions were progressive as they lasted for 15 s. The runners were informed of the changes in running conditions. The two running series were separated by 4 min walking and 1 min running at preferred speed. For clarification, the initial and final 100BW running conditions will be referred as initial (INIT) and reloaded (RLD) conditions, respectively.

Testing protocol showing the 30 s sample periods analyzed at the beginning (BEG) and at the end (END) of the three running conditions per series. Series 80BW and series 60BW refer to the running series performed at either 80 or 60 % body weight, respectively. Each series included three conditions referred as initial (INIT), unweighing (UNW), and reloaded (RLD). The first 30 s (BEG) values of the INIT condition were used as a reference (ref) for statistical analyses
Measurements
The air pressure variation inside the LBPP chamber was measured using pressure gauge (MPXV5010DP, Freescale®, Inc., Austin, TX) to assess indirectly the partial body support provided by the AlterG® technology. The electrical signal of the differential pressure (P atmospheric − P chamber) and the instantaneous treadmill velocity were recorded in parallel with the vertical ground reaction force (Fz) obtained from four dynamical load cells (XA-shear beam load cell, Sentran®, Ontario, CA) located under the frame of the AlterG® treadmill. Heel and toe-off events were detected using piezoelectric contactors (EPZ, Elektrotechnik Karl-Heinz Mauz GmbH, Nellingen, GE) fixed under the fore and rear parts of the shoe sole. These variables were continuously recorded during the whole test sessions. A tri-axial accelerometer (±6 g, Trigno, Delsys®, Inc., Natick, MA) placed on the sacrum level was used to record indirectly the 3D accelerations of the center of mass (CoM) at 148.1 Hz with surface electromyography (EMG) of the soleus (SOL), gastrocnemius medialis and lateralis (GaM, GaL), tibialis anterior (TA) and vastus medialis and lateralis (VM, VL) of the left lower limb that was recorded at 2 kHz (Trigno, Delsys®, Inc., Natick, MA) with common mode rejection rate >80 dB, bandwidth = 20–450 Hz ± 10 % and 1000 V/V gain. Positioning of the active surface electrodes was carried out according to the SENIAM recommendation (Hermens et al. 2000). A trigger was used to synchronize the EMG and accelerometer data recorded by Delsys® software (EMGwork®, Delsys®, Inc., Natick, MA). The kinetic data were sampled by an A/D board (NI_USB 6212 BNC, National Instrument®, Inc., Austin, TX). All signals were monitored and recorded at 1 kHz using a Virtual Instrument developed in Labview (v.8.5, National Instruments®, Inc., Austin, TX). Additional recordings included heart rate (Polar RS 400, Polar electro®, Inc. Lake Success, NY) and rate of perceived exertion (RPE) expressed on a 6–20 vertical scale (Borg 1970).
Data analysis
To examine the time course of the neuro-mechanical adjustments, the kinetic, kinematic, and EMG data analyses were carried out during 30 s at the beginning (BEG) and at the end (END) of each 3-min running condition. Each of these six sample periods per running series included on average 75 ± 11 successive left and right steps.
Figure 3 shows an individual example of the mean Fz, vertical displacement of CoM and Soleus EMG data analysis. The Fz analysis included: initial impact peak force (IPF), minimal force after IPF (MF), tolerance to impact [(IPF − MF) × 100/IPF], loading rate from 0.2 to 0.8 IPF, and active peak force (APF) during contact. Braking and push-off phases along the vertical axis were identified by double integration of the vertical CoM acceleration, using a 1–12 Hz two-way band-pass second-order Butterworth damped filter. These data enabled us to calculate the braking and push-off phase durations and impulses. The duty factor was expressed as the fraction of the left foot contact/stride duration. Vertical stiffness (k vert) was calculated as follows:
with k vert in kN m−1, APF in kN and ∆H s in m, defined by the vertical displacement of the CoM during contact. Flight and contact times were used to calculate step and stride frequencies. The obtained EMG signals were band-pass filtered (20–400 Hz), rectified and low-pass filtered using a 75 Hz critically damped filter (Morio et al. 2012). Both integrated and averaged muscle activities were then calculated for the total contact period, as well as for five specific phases: preactivation, expected stretch reflex (M1) and intermediate (0–M1), braking and push-off phases (Regueme et al. 2005). The preactivation phase was defined as the 100 ms preceding ground contact (Komi et al. 1987). M1 phase was averaged over 30 ms: from 30 to 60 ms after ground impact for the vasti muscles and from 40 to 70 ms for the SOL, GaM, and GaL (Regueme et al. 2005). The EMG/force ratio was calculated for the braking and push-off phases.

The upper graph shows an individual example of the vertical force (Fz) (solid line) and vertical CoM displacement (ΔH) (dashed line) during the preactivation, contact phase (composed of braking and push-off phases) and flight phase. IPF initial peak force, MF minimal force after IPF, loading rate calculated from 0.2 to 0.8 IPF, APF active peak force during contact, and ΔH B vertical displacement of the center of mass during the braking phase. The lower graph shows the corresponding rectified and filtered EMG activity (in arbitrary units-a.u.) from the soleus muscle. The shaded M1 area is expected to include the stretch reflex EMG response
Statistical analysis
The two running series were analyzed separately. To allow inter-condition comparisons for a given running series, the first 30 s (BEG) values of the initial (INIT) condition were used as a reference (‘ref’ in Fig. 2). Due to the non-normal distribution of some of the measured variables (tested by Kolmogorov–Smirnov and Lilliefors tests), non-parametric statistical testing was performed. Wilcoxon tests were used to verify whether the kinetic and kinematic variables differed between left and right lower limbs (LEG effect). The same statistical test was used to examine the ADJUSTMENT effect (ADJ) within a given running condition by comparing the BEG with the END sample period. In both cases, the statistical threshold was set at 0.05.
The weighing effect was tested using non-parametric analyses of variance for repeated measures (Friedman test, p = 0.05). Because of significant effects of only acute unweighing (UNW vs. INIT) and reloading (RLD vs. UNW) resulting in the after-effect (RLD vs. INIT), repeated Wilcoxon tests were performed to analyze these effects with a Bonferroni type correction factor (p ≤ 0.05/3 = 0.016).
Results
Neither LEG (left vs. right) nor ADJ (BEG vs. END) had any significant effect on the running kinematics and kinetics. Therefore, we concentrated our analysis on the left limb data during the last 30 s (END) of each running condition. Data are expressed as median and interquartile range in the text and figures.
Unweighing changes (from INIT to UNW)
Unweighing resulted in significant temporal changes (Fig. 4). Flight time increased at both 60BW [+65 % (+42 to +145), p < 0.001] and 80BW [+23 % (+14 to +42), p < 0.016]. The contact time did not change, leading to a significant decrease in step frequency in both 60BW and 80BW conditions [−14 % (−18 to −13) and −8 % (−9 to −4), respectively, p < 0.01]. Duty factor, defined as the fraction of the left foot contact/stride duration, decreased at both 60BW [−20 % (−30 to −14), p < 0.016] and 80BW [−9 % (−13 to −5), p < 0.01]. Braking phase duration was reduced only at 60BW [−9 % (−12 to −6), p < 0.01], whereas push-off phase duration did not change.

Relative unweighing-induced changes (Δ% ref) in temporal characteristics of the left step at 60BW (light bars) and at 80BW (dark bars). For each variable the individual changes are represented by the median, interquartile range, and extreme values. *p < 0.016, **p < 0.01 and ***p < 0.001 when statistically different from the initial condition values at 100BW
Unweighing also resulted in significant kinetic and kinematic changes (Fig. 5). In both unweighing conditions, reductions were observed in IPF [60BW: −11 % (−23 to −8), p < 0.016 and 80BW: −16 % (−26 to −9), p < 0.01] and in loading rate [60BW: −19 % (−31 to −13), p < 0.05 and 80BW: −18 % (−35 to −5), p < 0.01], with no change in tolerance to impact. Significant reductions were observed in APF [60BW: −25 % (−30 to −22), p < 0.01 and 80BW: −17 % (−23 to −8), p < 0.016] and in vertical displacement of CoM during the braking phase (ΔH B) [−33 % (−38 to −22), p < 0.016] at 60BW and 80BW: [−19 % (−21 to −16), p < 0.016] leading to increased vertical stiffness, but at 60BW only [+7 % (+2 to +17), p < 0.016]. Braking impulse was reduced at 60BW [−18 % (−37 to −13), p < 0.016] only, whereas push-off impulse decreased at both 60BW [−22 % (−57 to −10), p < 0.01] and 80BW [−8 % (−26 to 0), p < 0.016].

Relative unweighing-induced changes (Δ% ref) in the kinetic characteristics of the contact phase (LR loading rate, IPF and APF impact and active peak forces, ΔH B vertical displacement of the center of mass during the braking phase, K vert vertical stiffness) at 60BW (light bars) and at 80BW (dark bars). For each variable the individual changes are represented by the median, interquartile range, and extreme values. *p < 0.016 and **p < 0.01 when statistically different from the initial condition values at 100BW
Regarding the EMG data analysis (Fig. 6), the preactivation phase showed only a reduced TA activity at 60BW [−20 % (−49 to −1), p < 0.016]. The analyses of the subsequent braking and push-off phases revealed a large inter-individual variability at 60BW. The braking phase was characterized by reduced SOL and GaM activities, but only at 80BW [−10 % (−15 to −9) and −10 % (−16 to +1), respectively, p < 0.016]. The push-off phase presented an overall decrease in SOL [−20 % (−36 to −11)], GaM [−11 % (−33 to −5)], and GaL [−13 % (−41 to −6)] muscle activities at 80BW (p < 0.016), and a decrease in SOL at 60BW [−32 % (−46 to −24), p < 0.016]. The stretch reflex M1 analysis revealed reduced EMG responses in both VM and VL muscles at 60BW [−25 % (−50 to −13) and −35 % (−51 to −14), p < 0.016], and in VM at 80BW [−7 % (−35 to −4), p < 0.016]. EMG/force ratios were not significantly affected by unweighing, except for GaM that presented an increased ratio during the braking phase at 60BW [+6 % (−19 to +23) p < 0.016].

Relative unweighing-induced changes (Δ% ref) in the mean EMG activity of the recorded lower limb muscles (SOL soleus, GaM and GaL gastrocnemii medialis and lateralis) at 60BW (light bars) and at 80BW (dark bars). For each variable the individual changes are represented by the median, interquartile range, and extreme values. *p < 0.016 when statistically different from the initial condition values at 100BW
Mean heart rate was significantly lower at both 60BW [−10 % (−16 to −4) p < 0.016] and 80BW [−6 % (−8 to −1), p < 0.016]. Rate of perceived exertion presented a large inter-individual variability and was not significantly modified.
Reloading changes (from UNW to RLD) and after-effects at 100BW
In both running series, reloading was generally associated with significant opposite changes to those induced by unweighing. Most of the kinetic, kinematic, and EMG parameters, as well as heart rate and RPE, regained their initial values within 3 min after reloading.
Concerning the after-effects, the RLD run of the 60BW running series was characterized by an increased flight time [+11 % (+7 to +24)] as compared with the INIT run, as well as by a lower step frequency [−5 % (−8 to −3)] and a decreased duty factor [−3 % (−4 to 0)] (p <0.016). During the braking phase, GAL muscle activity and its stretch reflex M1 response were higher [+9 % (0 to +16) and +16 % (+16 to +17), respectively, p < 0.016] and GAM EMG/force ratio was increased [+12 % (−1 to +19), p < 0.016]. Mean heart rate was increased by 6 % [+4 to +8] (p < 0.016) and RPE by 25 % [+7 to +29] (p < 0.016).
In the RLD run of the 80BW running series, both IPF and loading rate decreased [−6 % (−29 to −3) and −7 % (−16 to +6), respectively, (p < 0.016)]. During the braking phase, GAM muscle activity was higher [+3 % (+2 to +15), p < 0.016]. Mean heart rate was increased by 4 % [+3 to +10] (p < 0.016) and RPE by 17 % [+9 to +42] (p < 0.016).
Discussion
The main purpose of the study was to examine the acute influence of short-term unweighing and reloading on the kinematic, kinetic, and EMG adjustments of the running pattern. Special emphasis was put on the identification of the exact phase(s) of the SSC in which such potential changes could occur. The main results showed that the expected decrease in step frequency was due to a longer flight time with no change in contact time. The passive impact peak decreased less than the active peak, but it occurred with a reduced vertical loading rate. One of the major findings was that the muscle activity of major lower limb extensor muscles did not change during the preactivation and braking phases, but decreased during the push-off phase. Reloading generally resulted in significant opposite changes to those induced by unweighing, but after-effects were still found in some of the mechanical and EMG running parameters 3 min later.
Unweighing changes
In agreement with the few studies that examined the running pattern under unweighing conditions (He et al. 1991; Chang et al. 2000; Grabowski and Kram 2008), the kinetic analysis revealed significant reductions in vertical impulse, with a larger decrease in active (APF) than in impact (IPF) peak force (Fig. 5). This is in line with the reduced knee forces demonstrated by Patil et al. (2013) and further confirmed by the observed lower vertical loading rate.
On the other hand, the kinetic and kinematic data analyses do not confirm our expectations of an initially deteriorated SSC function in the unweighing (UNW) running condition (with increased IPF, reduced tolerance to impact and consequently longer braking phase and contact time) (Fig. 4). Furthermore the absence of significant ADJ effect (from BEG to END) during the UNW running condition indicates that the 15 s transition phase was long enough for a complete adjustment at BEG. When the modified parameter is either gait velocity (Segers et al. 2007) or ground surface stiffness (Ferris et al. 1999), human gait adjustments to abrupt transitions are usually performed in only one step. However, a few minutes may be necessary to optimize SSC when running in unusual situations, as for example in barefoot vs. shod treadmill running (Divert et al. 2005) or in a fatigued state (Morio et al. 2012). From the few studies that examined the influence of simulated gravity, Donelan and Kram (1997) demonstrated an almost immediate habituation (within 10 steps) to treadmill walking. This is in line with the present observations of a rapidly adjusted pattern at BEG.
When considering the global unweighing effects on the SSC function, its major influence on the running pattern was the large increase in flight time, which contrasted with the unchanged contact time (Fig. 4). This pattern reminds the skipping pattern adopted by Neil Armstrong on the Moon and later described by Minetti et al. (2012). Unweighing-induced changes in flight time have not been reported in the literature except by Chang et al. (2000). Some studies observed decreases in contact time of about 10 % while running under simulated reduced gravity (He et al. 1991; Farley and McMahon 1992; Chang et al. 2000). However, this was observed at lower body weight levels (20–50 % BW) than in our study. The consistency of the contact time despite unweighing was emphasized by He et al. (1991) as it differed from the decrease predicted by the linear mass-spring model of the body and leg (McMahon and Cheng 1990). This was attributed to the fact that leg length is modified at impact and take-off, due to a greater knee extension and ankle plantar flexion. Finally, the present decrease of the duty factor is well in agreement with the earlier findings of Donelan and Kram (2000) supporting the absence of a deteriorated SSC running pattern.
The analysis of the EMG data revealed a global decrease in amplitude of lower limb muscle activity that confirms the earlier findings of running studies in partial unweighing conditions (Liebenberg et al. 2011; Hunter et al. 2014). However, most EMG reductions occurred during the push-off phase (Fig. 6). Regardless the weight bearing device, either harness or LBPP, the provided artificial upward force reduces the role of the stance limb in supporting the body while running so that less soleus muscle activity is needed (Ferris et al. 2001). In the present study, the LBPP system-induced upward force probably explains the reduced CoM lowering during the contact phase and the induced increase of vertical stiffness despite the absence of increased activity of the lower limb extensor muscles. Part of the reduction in EMG activity might also result from the medio-lateral and anterio-posterior stabilization provided by the LBPP chamber as it was already reported in running by Grabowski (2010).
The observed decreases in EMG would suggest an increased running economy, which is confirmed by the observed reduction in heart rate at both 60BW and 80BW. In agreement with Yates et al. (2011), however, no significant change was found in RPE. It should be emphasized that the limited sensation of the unweighing condition contrasted with the unpleasant overloading sensation expressed by most of the runners during the reloading transition phase. Part of the lack of sensitivity to unweighing may be attributed to the fact that mechanical sensors (i.e., cutaneous, muscular, tendinous, and/or articular) are normally responding to stimuli close to +1 g and above. With the LBPP technology, as the lower limbs still experience gravity even in the unweighing condition, foot pressure reduction may have been the only modulated sensory input for the lower limbs (Donelan and Kram 1997).
These overall observations suggest that the SSC efficacy was well preserved despite the unfamiliar features of the unweighing running condition, which is in contradiction to our first hypothesis.
The induced EMG reductions were SSC phase dependent, which confirms our second hypothesis. Because pre- and post-impact neural adjustments cannot be separated from a motor control perspective, it is essential to examine preactivation and braking parameters simultaneously.
The EMG amplitude analysis did not reveal any reduction during the preactivation phase in the unweighing condition except for the TA muscle at 60BW. The reduced TA activity is in line with the IPF reduction and with the shift from a rear- to a mid-foot striking pattern adopted by the two excluded runners of the present study. The present results are in contrast with the unweighing-induced EMG decreases reported for the triceps surae and vastus lateralis in drop jumps (Avela et al. 1994, 1996). The absence of a reduced activity of knee and ankle extensor muscles in the LBPP treadmill run could be attributed to the increased flight time. A longer flight is usually occurring when falling from a higher height, leading to an expected larger IPF and thus an increased preactivation (Santello and McDonagh 1998). On the other hand, it is expected that the positive vertical support provided by the LBPP chamber during the running flight phase resulted in a reduced vertical acceleration prior to impact. This could explain the preserved preactivation, as well as the reduced IPF and loading rate. The occulted vision of the lower limbs by the LBPP chamber may also be considered as a disturbing factor in the anticipation of the foot impact timing. The concept of a “default pattern” of preactivation has been reported during drop jump performed without visual information (Santello et al. 2001) as well as when manipulating the preactivation force level (Galindo et al. 2008). Further investigation is needed to study the effect of vision while running on the LBPP treadmill.
The post impact EMG patterns during the braking phase were also fairly robust, showing only limited EMG reduction for the soleus and gastrocnemius medialis muscles at 80BW and a reduced M1 reflex response for the VL muscle. This unexpected stability of lower limb muscle activity is partly attributed to the fact that the vertical support provided by the LBPP chamber does not modify the lower limb weight (Grabowski and Kram 2008). Lower limb muscle activities and resistance to ground impact are close enough to normal gravity conditions and can therefore be used as a tool for athletic rehabilitation training. Furthermore, as shown by the large reductions in vertical impulse and in CoM displacement lowering during the phase, the LBPP chamber provides the runner with a significant support that allows running with attenuated osteoarticular load bearing (Patil et al. 2013). This is further reinforced by the observation of a reduced vertical loading rate, a mechanical variable considered as related to some impact-induced running injuries (e.g., review by Zadpoor and Nikooyan 2011).
The push-off phase was characterized by an overall 20 % reduction in the activity of the triceps surae, which was even larger at 60BW, and by a significantly reduced push-off impulse both at 60 and 80BW. At constant running speed, reduced muscle activity during the push-off phase of the SSC is usually considered as a sign of improved running economy (Komi and Nicol 2008). Maintaining running speed with a reduced push-off impulse gives additional support to the assistance provided by the LBPP support. This is further confirmed by the 10 % reduction observed in the mean heart rate values. On the other hand, the lack of decrease in RPE at 60BW is attributed to the observed coordination difficulties encountered by a majority of the runners, especially by those with a naturally high stride frequency at normal body weight.
Thus, the distinct analysis of each phase of the SSC running cycle emphasizes the understanding of the underlying features of running in unweighing condition. According to Liebenberg et al. (2011), an overall decrease in EMG activation characterizes unweighted running. Our results emphasize the stability of thigh and shank muscle activity during both preactivation and braking phases in contrast with the reduced muscle activity during the push-off phase. The reduced vertical peak forces, loading rate, and braking impulse are thus mostly attributed to the LBPP chamber support. The subsequent reductions in the push-off phase activity and vertical impulse are considered as a rapid SSC optimization.
Reloading changes (from UNW to RLD) and after-effect changes (between RLD and INIT)
Returning to normal weight bearing resulted in opposite changes than those induced by unweighing. Most unweighing studies investigated longer term effects (i.e., after prolonged orbital flights) during treadmill walking (e.g., Layne et al. 1998). Their results cannot be compared to the present short-term condition as they occurred in parallel with considerable body alterations, including structural and functional characteristics of the neuromuscular system (Di Prampero and Narici 2003). A recent study of Gosseye et al. (2010) showed that running mechanics and EMG patterns on earth can reasonably be duplicated in hypogravity using a treadmill with a subject loading system that simulates gravity. Nevertheless, this study did not examine the early adjustments to the applied loading. On the other hand, parabolic flight is better suited for studying the effects of force transition and rapidly adapting motor processes (Lackner and DiZio 1996). However, these protocols differ from the present one by their limited unweighing testing duration (20–30 s in total but much shorter for given reduced gravity levels) and their longer transition phase from unweighing to normal body weight (20–25 s). From the treadmill studies performed in simulated unweighing condition, surprisingly none of them reported locomotor changes during the reloading phase (e.g., De Witt et al. 2008). The present results give additional support to the flexibility of the neuro-mechanical adjustments to short-term changes of earth gravity.
Interestingly, the observations of the after-effects following each unweighing condition both in the running pattern and in the RPE (higher sensation) may be considered as revealing updates of the internal model of the running pattern (Taube et al. 2012). In the running series at 60BW, the longer flight time reminds the skipping locomotor pattern commonly adopted and enjoyed by children despite its well-known higher energy cost (Minetti et al. 2012). In the present study, the uneconomical behavior is supported by the observations of increased GAL activity and GAM EMG/force ratio during the braking phase, as well as higher mean heart rate value. In the running series at 80BW, the minor after-effects, despite of the limited but clear changes during the unweighing running condition, emphasize the speed of the locomotor adjustments within given boundaries of external force constraints. However, the remaining reduced IPF and loading rate may indicate the preservation of the midfoot striking pattern adopted by most of the runners during unweighing.
There are certain limitations in the methods that need to be addressed, in particular the limited number of subjects and the absence of EMG recordings from the right lower limb. These limitations together with the need for medio-lateral and antero-posterior ground reaction force recordings should be considered in the future.
Conclusion
The present running study investigated the acute effects of short-term unweighing and reloading on running mechanics and lower limb muscle activity. In the unweighing condition, the running pattern was characterized by a reduced step frequency due to an increased flight time with unchanged contact time. The originality of the present EMG analysis was to identify the exact phase of the running pattern in which the neural and mechanical adjustments occurred. The improved SSC efficacy is attributed to the vertical support provided by the LBPP chamber during the entire stride. In a rehabilitation context, this should allow patients to run at earlier stages of recovery in a safe and rather economical way when remaining close to 80 % body weight. The after-effects highlight the fact that 3 min of unweighing are sufficient for an updating of the running pattern. Further studies are required to define the time evolution of these after-effects.
Abbreviations
- APF:
-
Active peak force
- BEG:
-
First 30 s sample of each running condition
- BW:
-
Body weight
- CoM:
-
Center of mass
- ∆H B :
-
Vertical displacement of CoM during the braking phase
- EMG:
-
Electromyography
- END:
-
Last 30 s sample of each running condition
- F z :
-
Vertical ground reaction force
- GRF:
-
Ground reaction force
- GaL:
-
Gastrocnemius lateralis
- GaM:
-
Gastrocnemius medialis
- IPF:
-
Impact peak force
- k vert :
-
Vertical stiffness
- LBPP:
-
Lower body positive pressure
- MF:
-
Minimal force after IPF
- RLD:
-
Reloading
- RPE:
-
Rating of perceived exertion
- SOL:
-
Soleus
- SSC:
-
Stretch-shortening cycle
- TA:
-
Tibialis anterior
- UNW:
-
Unweighing
- VL:
-
Vastus lateralis
- VM:
-
Vastus medialis
References
Avela J, Santos PM, Kyröläinen H, Komi PV (1994) Effects of different simulated gravity conditions on neuromuscular control in drop jump exercises. Aviat Space Environ Med 65:301–308
Avela J, Santos PM, Komi PV (1996) Effects of differently induced stretch loads on neuromuscular control in drop jump exercise. Eur J Appl Physiol 72:553–562
Borg G (1970) Perceived exertion as an indicator of somatic stress. Scand J Rehab Med 2:92–98
Chang YH, Huang HW, Hamerski CM, Kram R (2000) The independent effects of gravity and inertia on running mechanics. J Exp Biol 203:229–238
Cronin NJ, Carty CP, Barrett RS (2011) Triceps surae short latency stretch reflexes contribute to ankle stiffness regulation during human running. PLoS ONE 6:e23917
De Witt JK, Hagan RD, Cromwell RL (2008) The effect of increasing inertia upon vertical ground reaction forces and temporal kinematics during locomotion. J Exp Biol 211:1087–1092
De Witt JK, Perusek GP, Lewandowski BE et al (2010) Locomotion in simulated and real microgravity: horizontal suspension vs. parabolic flight. Aviat Space Environ Med 81:1092–1099
Di Prampero PE, Narici MV (2003) Muscles in microgravity: from fibres to human motion. J Biomech 36(3):403–412
Divert C, Mornieux G, Baur H et al (2005) Mechanical comparison of barefoot and shod running. Int J Sports Med 26:593–598
Donelan JM, Kram R (1997) The effect of reduced gravity on the kinematics of human walking: a test of the dynamic similarity hypothesis for locomotion. J Exp Biol 200:3193–3201
Donelan JM, Kram R (2000) Exploring dynamic similarity in human running using simulated reduced gravity. J Exp Biol 203:2405–2415
Farley CT, McMahon TA (1992) Energetics of walking and running: insights from simulated reduced-gravity experiments. J Appl Physiol 73:2709–2712
Ferris DP, Louie M, Farley CT (1998) Running in the real world: adjusting leg stiffness for different surfaces. Proc R Soc Lond B Biol Sci 265:989–994
Ferris DP, Liang K, Farley CT (1999) Runners adjust leg stiffness for their first step on a new running surface. J Biomech 32:787–794
Ferris DP, Aagaard P, Simonsen EB et al (2001) Soleus H-reflex gain in humans walking and running under simulated reduced gravity. J Physiol 530:167–180
Galindo A, Barthelemy J, Ishikawa M et al (2008) Neuromuscular control in landing from supra-maximal dropping height. J Appl Physiol 106:539–547
Gosseye TP, Heglund NC (2010) Biomechanical analysis of running in weightlessness on a treadmill equipped with a subject loading system. Eur J Appl Physiol 110:709–728
Grabowski AM (2010) Metabolic and biomechanical effects of velocity and weight support using a lower-body positive pressure device during walking. Arch Phys Med Rehabil 91:951–957
Grabowski AM, Kram R (2008) Effects of velocity and weight support on ground reaction forces and metabolic power during running. J Appl Biomech 24:288–297
He JP, Kram R, McMahon TA (1991) Mechanics of running under simulated low gravity. J Appl Physiol 71:863–870
Hermens HJ, Freriks B, Disselhorst-Klug C, Rau G (2000) Development of recommendations for SEMG sensors and sensor placement procedures. J Electromyogr Kinesiol 10:361–374
Hunter I, Seeley MK, Hopkins JT et al (2014) EMG activity during positive-pressure treadmill running. J Electromyogr Kinesiol 24:348–352
Ishikawa M, Komi PV (2008) Muscle fascicle and tendon behavior during human locomotion revisited. Exerc Sport Sci Rev 36(4):193–199
Komi PV, Nicol C (2008) Stretch-shortening cycle of muscle function. In: Komi PV (ed) The encyclopedia of sports medicine: neuromuscular aspects of sports performance, Chap 2. Wiley–Blackwell Publishing, pp 15–31
Komi PV, Gollhofer A, Schmidtbleicher D, Frick U (1987) Interaction between man and shoe in running: considerations for a more comprehensive measurement approach. Int J Sports Med 8:196–202
Lackner JR, DiZio P (1996) Motor function in microgravity: movement in weightlessness. Curr Opin Neurobiol 6:744–750
Lavcanska V, Taylor NF, Schache AG (2005) Familiarization to treadmill running in young unimpaired adults. Hum Mov Sci 24:544–557
Layne CS, Lange GW, Pruett CJ et al (1998) Adaptation of neuromuscular activation patterns during treadmill walking after long-duration space flight. Acta Astronaut 43(3–6):107–119
Liebenberg J, Scharf J, Forrest D et al (2011) Determination of muscle activity during running at reduced body weight. J Sports Sci 29:207–214
McMahon TA, Cheng GC (1990) The mechanics of running: how does stiffness couple with speed? J Biomech 23(Suppl 1):65–78
Minetti AE, Pavei G, Biancardi CM (2012) The energetics and mechanics of level and gradient skipping: preliminary results for a potential gait of choice in low gravity environments. Planet Space Sci 74:142–145
Morio C, Nicol C, Barla C et al (2012) Acute and 2 days delayed effects of exhaustive stretch-shortening cycle exercise on barefoot walking and running patterns. Eur J Appl Physiol 112:2817–2827
Patil S, Steklov N, Bugbee WD et al (2013) Anti-gravity treadmills are effective in reducing knee forces. J Orthop Res 31:672–679
Regueme SC, Nicol C, Barthèlemy J, Grélot L (2005) Acute and delayed neuromuscular adjustments of the triceps surae muscle group to exhaustive stretch-shortening cycle fatigue. Eur J Appl Physiol 93:398–410
Santello M, McDonagh MJ (1998) The control of timing and amplitude of EMG activity in landing movements in humans. Exp Physiol 83:857–874
Santello M, McDonagh MJ, Challis JH (2001) Visual and non-visual control of landing movements in humans. J Physiol 537:313–327
Segers V, Lenoir M, Aerts P, De Clercq D (2007) Kinematics of the transition between walking and running when gradually changing speed. Gait Posture 26:349–361
Shih Y, Lin K, Shiang T (2013) Is the foot striking pattern more important than barefoot or shod conditions in running? Gait Posture 38:490–494
Taube W, Leukel C, Lauber B, Gollhofer A (2012) The drop height determines neuromuscular adaptations and changes in jump performance in stretch-shortening cycle training. Scand J Med Sci Sports 22:671–683
Taylor J, Komi PV, Nicol C (2008) Central and neuromuscular fatigue. In: Nigel Taylor, Groeller H, McLennan PL (eds) Physiological bases of human performance during work and exercise, Sect 1, Chap 5. Churchill Livingstone, pp 91–113
Yates JW, Mohney LE, Abel MG, Shapiro R (2011) Effect of unweighting using the Alter-G trainer on VO2, heart rate and perceived exertion. Med Sci Sports Exerc 43(5):779
Zadpoor AA, Nikooyan AA (2011) The relationship between lower-extremity stress fractures and the ground reaction force: a systematic review. Clin Biomech 26(1):23–28
Acknowledgments
We are particularly grateful for the assistance given by Dr. Antoine Morice and Dr. Cedric Morio for data analyses.
Conflict of interest
None of the authors had any financial or personal conflict of interest with regard to this study.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Toshio Moritani.
Rights and permissions
About this article

Cite this article
Sainton, P., Nicol, C., Cabri, J. et al. Influence of short-term unweighing and reloading on running kinetics and muscle activity. Eur J Appl Physiol 115, 1135–1145 (2015). https://doi.org/10.1007/s00421-014-3095-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00421-014-3095-3