
Abstract
Factors such as non-uniform illumination of seafloor photographs and partial burial of polymetallic nodules and crusts under sediments have prevented the development of a fully automatic system for evaluating the distribution characteristics of these minerals, necessitating the involvement of a user input. A method has been developed whereby spectral signatures of different features are identified using a software ‘trained’ by a user, and the images are digitized for coverage estimation of nodules and crusts. Analysis of >20,000 seafloor photographs was carried out along five camera transects covering a total distance of 450 km at 5,100–5,300 m water depth in the Central Indian Ocean. The good positive correlation (R2 > 0.98) recorded between visual and computed estimates shows that both methods of estimation are highly reliable. The digitally computed estimates were ∼10% higher than the visual estimates of the same photographs; the latter have a conservative operator error, implying that computed estimates would more accurately predict a relatively high resource potential. The fact that nodules were present in grab samples from some locations where photographs had nil nodule coverage emphasises that nodules may not always be exposed on the seafloor and that buried nodules will also have to be accounted for during resource evaluation. When coupled with accurate positioning/depth data and grab sampling, photographic estimates can provide detailed information on the spatial distribution of mineral deposits, the associated substrates, and the topographic features that control their occurrences. Such information is critical for resource modelling, the selection of mine sites, the designing of mining systems and the planning of mining operations.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Just as remote sensing finds its application for evaluating different landforms as well as oceanographic conditions through series of satellite images, underwater photography is a remote sensing technique for evaluating seafloor features such as microtopography, rock outcrops, mineral resources and manmade structures. It developed in the 1940s (e.g. Ewing 1946) and became an effective tool for observing the seafloor environment, including its benthic organisms and bottom currents (e.g. Shipek 1960; La Fond 1962; Edgerton 1967; Heezen and Hollister 1971; Borowski 2001; Grizzle et al. 2008). More recently, large deposits of deep-sea minerals—e.g. polymetallic nodules and ferromanganese crusts—that occur on abyssal plains (>4,000 m deep) have been recognised as critical future resources of various metals such as Mn, Fe, Co, Cu and Ni (Cronan 2000).
In the Indian Ocean, the Central Indian Basin represents one of the key regions for polymetallic nodules, in which their distribution and other characteristics have been studied in considerable detail using conventional techniques such as freefall grabs, corers and dredges (Jauhari 1989; Banerjee and Mukhopadhyay 1991; Banerjee et al. 1991; Banerjee and Miura 2001; Jauhari et al. 2001; Jauhari and Iyer 2008; Vineesh et al. 2009). The associated bathymetry has been investigated with sonar systems (e.g. Kodagali 1988; Kodagali and Sudhakar 1993), and the seafloor features with photography (e.g. Sharma 1989a, 1993).
The application of photographic techniques for studying such resources has steadily gained significance and photography is now established as a reliable method for evaluating deep-sea deposits (e.g. Glasby and Singleton 1967; Fewkes et al. 1979; Cronan 1980; Jung et al. 2001), enabling rapid surveying and, more importantly, providing unambiguous visualization of the seafloor (e.g. Scrutton and Talwani 1982; Edwards et al. 2003). However, non-uniform illumination of seafloor photographs, varying altitude of the camera system due to continuous motion, and partial burial of minerals such as manganese nodules and crusts under sediments hinder the formulation of standard analytical procedures for evaluating seafloor photographs and stress the need for user-defined parameters while analysing each photograph.
Some methods initially developed for the estimation of nodules from photographs include point counting (Anonymous 1982), using an electronic planimeter (Fewkes et al. 1979), projecting cartoons of photographs of known nodule coverage (Frazer et al. 1978), and image processing techniques (e.g. Park et al. 1997). Several researchers focused on photography-based mineral resource estimations of the seafloor (e.g. Felix 1980; Handa and Tsurusaki 1981; Lenoble 1982; Sharma 1993). However, many of these methods either were tedious or lacked the human input required to differentiate between specific features in the photographs.
This study aims to develop a user-interfaced image analysis method for estimating deep-sea mineral resources such as polymetallic nodules and ferromanganese crusts based on seafloor photographs obtained from a deep-towed photography system deployed in the Central Indian Basin. The method and its applications would help in the rapid mapping of seafloor mineral resources in terms of their two-dimensional distribution as well as relation with other substrates and topography. Archiving of data and its application for evaluating the distribution characteristics of the deposits are also described.
Materials and methods
Deep-towed photography system
The deep-towed photography system consists of a tow body, a depressor and a deck unit (Fig. 1). The tow body weighs about 600 kg and comprises two still cameras, one video camera, an altimeter, light source and battery packs. The depressor weighs about 1.5 tons and is used to dampen the effect of ship movement on the tow body. The photography system is towed behind the ship at one to two knots along a pre-determined track and generally operated at an altitude of 4 m to 5 m, the depressor being positioned 40–50 m above the seafloor. Data and power transmission from the ship is achieved through a coaxial cable between the deck unit, depressor and tow body.

Schematic diagram of deep-tow photographic system
Raw data types
In the period August–December 1994, deep-towed camera surveys were carried out in the Central Indian Ocean Basin onboard R/V A.A. Sidorenko, during which >50,000 seafloor photographs were taken at a prefixed interval of 30 s on long spools of 35-mm black/white (B/W) photographic films. Ship navigation data were recorded every 1 min using a global positioning system throughout the surveys. Depth information was obtained from the ship’s echosounder. The various datasets were later integrated into a single database (Sharma et al. 1995; see also below) for easy retrieval using interactive software (Sankar and Sharma 2005).
Raw data processing
For this study, 20,500 photographs were analysed along five selected deep-tow transects covering a total distance of 450 km at 5,100–5,300 m water depth (Table 1, Fig. 2). In these photographs, nodules appear as small, black spherical objects scattered on the seafloor, crusts as large angular outcrops, and the surrounding sediments as light-coloured matrix (Fig. 3). The negative of each photograph was scanned individually by means of a UMAX PowerLook 180 (uniform resolution of 450 dpi) combined with SilverFast Ai NegaFix software for conversion to the positive of the image, which was saved in 8-bit nonlinear grey-scale format for further processing.

Locations of deep-tow photographic transects in the Central Indian Ocean. The five transects reported in more detail in the present study are highlighted in bold (transects 4-4, 9-1, 12-1, 12-2 and 12-3)

Photographs showing different seafloor features: a dense nodules, b crusts, c nodules and crusts and d nodules and animals
In these images, nodule and crust coverages (percent area covered) were evaluated by means of the GIS-compatible ERDAS Imagine software (version 8.5; ERDAS 1991). This user-friendly image processing software uses advanced image classification methods enabling the operator to assign a range of grey shades to different features, depending on his/her expertise.
Data archive
A database was created in MS Access, consisting of (1) basic data such as photo identity number, ship name, cruise number and line/transect number; (2) navigation data such as the date, time, latitude, longitude, distance and water depth at each photo location; (3) operation data such as photo number, altitude, length, breadth and area of seafloor photographed; (4) seafloor data such as visual coverage estimates of nodules (pn), crusts (pc) and sediments (ps), as well as ERDAS computed estimates of nodules (cnp), crusts (ccp) and sediments (csp). A detailed description of this database is provided in Table 1 in the Electronic supplementary material for this article, available online to authorized users.
Data presentation
The percentage of visual versus computed estimates of nodule coverage (pn/cnp*100), and the percentage difference between these (difference %) were calculated for all the photographs. This enabled data presentation in terms of frequency distributions of nodule coverage (cf. computed estimates), and correlation plots of visual versus computed estimates for all the transects. The spatial distributions of nodules and crusts are presented in the form of XY plots relating position to depth, using Grapher software.
Seafloor photograph analysis
The human eye can inherently distinguish between nodules and crust from a seafloor B/W photograph. Depending on the prevailing light conditions and sediment cover, however, the grey shades associated with nodules and crusts can vary. Nevertheless, a trained operator can easily recognise specific signatures on the basis of additional information on nodule/crust shape, size and other morphological characteristics. Analogously, it is necessary to ‘teach’ any software to recognise a nodule, crust or simply sediment. An artificial neural network (ANN) uses a mathematical or computational model for information processing based on a connectionist approach. ANN can be used to model complex relationships to identify patterns in data, and a similar approach has been followed in ERDAS. This entails sorting the pixels into different classes by assigning different shades of grey to each pixel representing different features in an image. (Note that images judged as having nil nodule/crust coverage by visual estimation were not used in this case.) ERDAS offers an unsupervised and a supervised digital image classification method.
Unsupervised classification
In unsupervised classification, the software automatically assigns grey shades to each pixel based on the number of classes defined for the image. In this multi-spectral classification, each pixel is assigned a class based on similar spectral signatures. The classified image produces an attribute table showing the number of pixels for different grey shades assigned to each class. An example is provided in Fig. 1 in the online electronic supplementary material for this article. In the present case, the various photographs had different levels of illumination, making it difficult to identify a cut-off between different grey shades. Therefore, this classification was not used to estimate nodule/crust/sediment coverage per se. Nevertheless, it yielded images of clarity superior to that of the original images; these were selected for further processing via supervised classification.
Supervised classification
Compared to unsupervised classification, supervised classification is more user-friendly. User input plays a key role to identify the spectral characteristics of each photograph for a particular class by careful selection of ‘training sites’ (polygons), as part of the following steps:
-
Defining the training sites (polygons) for each feature and creating different classes
-
Evaluating and editing the classes
-
Merging closely related classes into a single class for particular features
-
Classifying the image
-
Evaluating the classification.
Training sites or polygons were created around the features (nodules and/or crusts and sediments) that needed to be classified. For this, a range of grey shades was assigned to each feature and then the classes were merged into a single class for that particular feature (nodule/crust), which was then used for processing the image under supervised classification. The classified output image produces an attribute table in which the numbers of classes prescribed by the user are shown together with their pixel values. Examples are provided in Figs. 2, 3 and 4 in the online electronic supplementary material for this article. The total number of pixels for nodules and/or crusts and sediments was calculated. The percent cover of each feature was then estimated by dividing the individual number of pixels for nodule and/or crusts and sediments by this sum. It should be noted that, in order to minimise error, care was taken in identifying the training sites in images containing nodules and crusts, and also in merging the classes. An overview of the procedure adopted for unsupervised / supervised classification in ERDAS is shown in Fig. 4.

Procedure adopted for classification of seafloor photographs
Results
Of the 20,550 photographs taken along the five selected deep-tow photography transects covering a total distance of 450 km, image processing could be carried out for all but 34 photographs (0.16%), which were of insufficient quality (Table 1). With an optimum operating altitude of 3–5 m above the seafloor, the average seafloor area covered by each photograph varied between 5 m2 and 16 m2, with an average distance of 22 m between any two photographs.
Visual versus computed estimates
Comparison of average values for nodule estimates shows that the visual estimates (pn) are always lower than the computed estimates (cnp) for all the photographs, the former ranging from 2.1–12.9%, the latter from 2.5–15.3% (Table 2). Differences between the two types of estimates vary from 4.5–16% for all transects combined (overall difference of 12.4%), representing an underestimation by visual estimates. The difference is low for transects 4-4 and 12-1 (4.5% and 8.2%), and high for the other three transects (14.9%, 16.0% and 16.0%). Considering only the photographs that have at least some nodule coverage (i.e. excluding those with 0% nodule coverage), the difference in estimates is low (4.6–8.4%) for all transects, except transect 9-1 (difference of 16.4%), with an overall difference of 10.0% for all transects combined.
For the photographs classified in intervals of 10% (0%, 10%, 20%, 30%, ... 90%), the correlation graphs in Fig. 5 show the range of computed values (cnp) corresponding to every 10% class range of visual values (pn) for the different transects. In all cases, there is positive correlation between the visual and computed estimates, with high coefficients of determination (R2 > 0.98). This shows that both methods of estimation have good reliability and that the computed values are sufficiently accurate.

Correlation between visual (pn) and computed (cnp) nodule estimates along the five selected transects: a transect 4-4, b transect 9-1, c transect 12-1, d transect 12-2, e transect 12-3
Frequency distribution of nodules
The frequency distribution of nodule coverage from visual and computed estimates (Table 3) shows that almost two-thirds (65%) of the photographs have nil nodule coverage (i.e. no exposed nodules); most (17–21%) of the remaining photographs have low nodule coverage (1–20% coverage), some (∼11%) have moderate nodule coverage (20–50% coverage) and very few have high nodule coverage (50–80% coverage).
Frequency distribution of crusts
Ferromanganese crusts or rock outcrops were observed in only 1% of the photographs (203 of 20,550). The frequency distribution of computed estimates shows that, of these photographs, about half (48%) have low (<20%) coverage, one third (34%) have moderate (20–50%) coverage and the remainder (17%) have high (50–90%) coverage on the seafloor (Table 4).
Spatial distribution of nodules and crusts
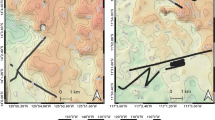
Plotting the photographic data in terms of geographic locations (latitude, longitude) would reveal any spatial distribution trends for nodules and crusts on the seafloor. As illustrated in Fig. 6a for a selected section of transect 4-4 (cf. Fig. 2), distinct zones of occurrence of crust outcrops and nodule fields can be mapped. Analogously, plotting nodule and crust occurrence relative to water depth (Y axis) and distance along a specific transect (X axis) reveals spatial variation controlled by, for example, local topography. Along the same section of transect 4-4, crust outcrops are exposed preferentially near the top of an abyssal hill (Fig. 6b); nodules are exposed largely on the lower slopes, where sediment accumulation would be less than on the flat abyssal plains or in valleys.

a Distribution of nodules and crusts along a section of transect 4-4. b Distance vs. depth distribution of nodules and crusts along the same section of transect 4-4
Discussion and conclusions
Application of image processing software for the evaluation of seafloor photographs in assessments of deep-sea minerals has always been limited due to the inability of the software to distinguish between different seafloor features of similar grey shades. Hence, human expertise is required in order to ‘teach’ the software how to differentiate between features before quantifying them. In this study, a procedure for estimating the coverage of polymetallic nodules and ferromanganese crusts has been developed that combines the capability of ERDAS image processing software with a user-defined, supervised classification for identifying these features. Based on an analysis of more than 20,000 seafloor photographs, this method substantially helped in image enhancement and accurate computation of degree of coverage. As the photographs were taken at an average interval of only 22 m, the photographic surveys served the important purpose of filling the gaps in spatial nodule distribution assessments from earlier campaigns involving coarser-grid grab sampling at intervals of at least ∼6 km (e.g. Jauhari et al. 2001).
The finding that the computed estimates were higher (by ∼10%) than the visual estimates—i.e. there was an underestimation by visual estimates—is not surprising. The photographs were generally classified in intervals of 10% (0%, 10%, ... 90%), and an operator making these estimates would tend to conservatively assign to a lower class and not overestimate the resource; by contrast, the computed estimates account for intermediate values as well. By implication, the computations yield a more accurate, higher potential of the deposit. This is an important development that could serve to improve earlier empirical formulae for the estimation of nodule abundance from photographic data in the Central Indian Basin (Handa and Tsurusaki 1981; Sharma 1989a, b).
The finding that the coverage of exposed nodules can be extremely variable (0–80%) on the seafloor, and evidence of spatial segregation of crusts and nodules on a hill top–flank gradient are consistent with earlier work showing that site-specific topographic (e.g. slope) and sediment characteristics are critical factors in explaining distribution patterns of nodules on the seafloor (e.g. Kodagali 1988; Banerjee et al. 1991; Yamazaki et al. 1994; Yamazaki and Sharma 1998, 2000; Banerjee and Miura 2001). Moreover, the fact that nodules have been collected in grab samples at many locations where no nodules were visible in the photographs confirms the occurrence of buried nodules under the sediment–water interface layer (Sharma 1989a; Banerjee et al. 1991). This burial and exposure of nodules is known to depend on sediment accumulation, which in turn is controlled by seafloor topography (Sharma and Kodagali 1993). This buried reservoir needs to be duly considered during resource evaluation of nodule deposits. Indeed, one promising approach involves the use of backscatter data from multibeam surveys in demarcating potential nodule-bearing areas in the Central Indian Ocean (Chakraborty and Kodagali 2004).
Although crust/rock outcrops were observed at very few locations in the photographic surveys, these need detailed mapping as possibly unfavourable areas where mining operations may be difficult and risk equipment damage due to interference by hard substrates. Again, any burial of nodules under sediments would imply that the design of the mining device needs to take this factor onto consideration as well, in order to mine both buried and exposed nodules. Those photographs in which nodules and crusts co-occur indicate transition zones between the outcrops and nodule fields, mapping of which would be very useful in deciphering the margins of potential nodule mining areas. This applies not only to regional—but also to latitudinal-scale assessments (e.g. Iyer and Sharma 1990; Sharma and Kodagali 1993).
In conclusion, the findings of the present study strengthen the need for both small- (site-specific, regional) and large-scale (latitudinal) photographic surveys complementing generally coarser-gridded and more time-consuming exploration campaigns to evaluate mineral resources. When combined with the usage of suitable software such as the GIS-compatible ERDAS Imagine under operator-defined, supervised classification, photographic surveys can provide valuable data for the accurate quantification of mineral deposits and their associated substrates. Our findings also highlight the need for further technological development enabling meaningful evaluation and recovery of buried resources. Such information is critical for resource modelling, the selection of mine sites, the designing of mining systems and the planning of mining operations.
References
Anonymous (1982) Assessment of manganese nodule resources: the data and the methodologies. UNOET Branch. Graham and Trotman, London
Banerjee R, Mukhopadhyay R (1991) Nature and distribution of manganese nodules from three sediment domains of the Central Indian Basin, Indian Ocean. Geo-Mar Lett 11(1):39–43. doi:10.1007/BF02431053
Banerjee R, Miura H (2001) Distribution pattern and morphochemical relationships of manganese nodules from the Central Indian Basin. Geo-Mar Lett 21(1):34–41. doi:10.1007/s003670100065
Banerjee R, Iyer SD, Dutta P (1991) Buried nodules and associated sediments from the Central Indian Basin. Geo-Mar Lett 11(2):103–107. doi:10.1007/BF02431037
Borowski C (2001) Physically disturbed deep-sea macrofauna in the Peru Basin, southeast Pacific, revisited 7 years after the experimental impact. Deep-Sea Res II 48:3809–3839
Chakraborty B, Kodagali V (2004) Characterizing Indian Ocean manganese nodule-bearing seafloor using multi-beam angular backscatter. Geo-Mar Lett 24(1):8–13. doi:10.1007/s00367-003-0153-y
Cronan DS (1980) Underwater minerals. Academic, London
Cronan DS (2000) Handbook of marine mineral deposits. CRC, London
Edgerton HE (1967) The instruments of deep-sea photography. In: Hersey JB (ed) deep-sea photography. Hopkins, Baltimore, pp 47–54
Edwards BD, Dartnell P, Chezar H (2003) Characterisation benthic substrates of Santa Monica Bay with seafloor photography and multibeam sonar imagery. Mar Environ Res 56:47–66
ERDAS (1991) ERDAS imagine tour guides. ERDAS, Atlanta
Ewing M (1946) Photography of the ocean bottom. Optical Soc Am J 36:307–321
Felix D (1980) Some problems in making nodule abundance estimates from sea floor photographs. Mar Mining 2:293–302
Fewkes RH, McFarland WD, Reinhart WR, Sorem RK (1979) Development of a reliable method for evaluation of deep sea manganese nodule deposits. National Technical Information Service, US Department of Commerce, Bureau Mines Open File Rep 64–80
Frazer JZ, Fisk MB, White M, Wilson L (1978) Availability of Cu, Ni, Co and Mn from ocean ferromanganese nodules. Scripps Inst Oceanogr ref no 78–25
Glasby GP, Singleton RJ (1967) Underwater photographs of manganese nodules from the Southwestern Pacific Basin. N Z J Geol Geophys 18(4):597–604
Grizzle RE, Brodeur MA, Abeels HA, Greene JK (2008) Bottom habitat mapping using towed underwater videography: subtidal oyster reefs as an example application. J Coastal Res 24(1):103–109
Handa K, Tsurusaki K (1981) Manganese nodules: relationship between coverage and abundance in the northern part of Central Pacific Basin. In: Deep Sea Mineral Resources Investigation in the Northern Part of Central Pacific Basin, Geological Survey of Japan, cruise rep no 15, pp 184–217
Heezen BC, Hollister CD (1971) The face of the deep. Oxford University Press, New York
Iyer SD, Sharma R (1990) Correlation between occurrence of manganese nodules and rocks in a part of the Central Indian Ocean Basin. Mar Geol 92(1/2):127–138
Jauhari P (1989) Variability of Mn, Fe, Ni, Cu and Co in manganese nodules from the Central Indian Ocean Basin. Mar Geol 86:237–242
Jauhari P, Iyer SD (2008) A comprehensive view of manganese nodules and volcanics of the Central Indian Ocean Basin. Mar Georesources Geotechnol 26:231–258
Jauhari P, Kodagali VN, Sankar SJ (2001) Optimum sampling interval for evaluating ferromanganese nodule resources in the central Indian Ocean. Geo-Mar Lett 21(3):176–182. doi:10.1007/s00367-001-0081-7
Jung H-S, Ko Y-T, Chi S-B, Moon J-W (2001) Characteristics of seafloor morphology and ferromanganese nodule occurrence in Korea Deep-sea Environmental Study (KODES) area, NE Equatorial Pacific. Mar Georesources Geotechnol 191:167–180
Kodagali V (1988) Influence of regional and local topography on the distribution of polymetallic nodules in Central Indian Ocean Basin. Geo-Mar Lett 8(3):173–178. doi:10.1007/BF02326094
Kodagali VN, Sudhakar M (1993) Manganese nodule distribution in different topographic domains of the Central Indian Basin. Mar Georesources Geotechnol 11:293–309
La Fond EC (1962) Deep current measurements with the bathyscaph Trieste. Deep-Sea Res 9:115–116
Lenoble JP (1982) Technical problems in ocean mining evaluation. In: Varentsov IM, Grasselly GY (eds) Geology and geochemistry of manganese, vol III. Hungarian Academy of Science, Budapest, pp 327–342
Park CY, Kang JK, Kim CW, Park SH (1997) Estimation of coverage and size distribution of manganese nodules based on image processing techniques. In: Proc 2nd Ocean Mining Symp, 24–26 November 1997, Seoul, Korea, pp 40–44
Sankar JS, Sharma RS (2005) An interactive end-user software application for deep sea photographic database. Computers Geosci 31:718–734
Scrutton RA, Talwani M (1982) The ocean floor. Wiley, New York
Sharma R (1989a) Effect of sediment-water interface ‘boundary layer’ on exposure of nodules and their abundance: a study from seabed photos. J Geol Soc India 34:310–317
Sharma R (1989b) Computation of nodule abundance from sea bed photos. In: Proc The 21st Offshore Technology Conf, 1–4 May 1989, Houston, TX, pp 201–212
Sharma R (1993) Quantitative estimation of seafloor features from photographs and their applications to nodule mining. Mar Georesources Geotechnol 11:311–331
Sharma R, Kodagali VN (1993) Influence of seabed topography on distribution of nodules and associated features in Central Indian Ocean: a study based on seabed photographs. Mar Geol 110:153–162
Sharma R, Sankar M, Sudhakar M, Ramprasad T (1995) Integration of deeptow data for mapping of deepsea resources. In: Proc 1st ISOPE Ocean Mining Symp, 21–22 November 1995, Tsukuba, Japan, pp 105–111
Shipek CJ (1960) Photographic study of some deep-sea floor environments in the eastern Pacific. Geol Soc Am 71(7):1067–1074
Vineesh TC, Nath BN, Banerjee R, Jaisankar S, Lekshmi V (2009) Manganese nodule morphology as indicators for oceanic processes in the Central Indian Basin. Int Geol Rev 51:27–44
Yamazaki T, Sharma R (1998) Distribution characteristics of Co-rich manganese deposits on a seamount in the Central Pacific Ocean. Mar Georesources Geotechnol 16:283–305
Yamazaki T, Sharma R (2000) Morphological features of Co-rich manganese deposits and their relation to seabed slopes. Mar Georesources Geotechnol 18:43–76
Yamazaki T, Sharma R, Tsurusaki K (1994) Microtopographic analysis of Co-rich manganese deposits on a mid-Pacific seamount. Mar Georesources Geotechnol 12:33–52
Acknowledgements
This study was carried out under the Environmental studies for polymetallic nodule mining funded by the Ministry of Earth Sciences, Govt. of India. This paper is NIO contribution no. 4695.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary materials
Below is the link to the electronic supplementary material.
ESM 1
(PDF 4391 kb)
Rights and permissions
About this article
Cite this article
Sharma, R., Sankar, S.J., Samanta, S. et al. Image analysis of seafloor photographs for estimation of deep-sea minerals. Geo-Mar Lett 30, 617–626 (2010). https://doi.org/10.1007/s00367-010-0205-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00367-010-0205-z