
Abstract
The tendency of animals to follow boundaries within their environment can serve as a strategy for spatial learning or defensive behaviour. We examined whether Xenopus laevis tadpoles and froglets employ such a strategy by characterizing their swimming pattern in a square tank with shallow water. Trajectories obtained from video recordings were analysed for proximity to the nearest wall. With the exception of young larvae, the vast majority of animals (both tadpoles and froglets) spent a disproportionately large amount of time near the wall. The total distance covered was not a confounding factor, but animals were stronger wall followers in smaller tanks. Wall following was also not influenced by whether the surrounding walls of the tank were black or white, illuminated by infrared light, or by the presence or absence of tentacles. When given a choice in a convex tank to swim straight and leave the wall or turn to follow the wall, the animals consistently left the wall, indicating that wall following in X. laevis is barrier-driven. This implies that wall following behaviour in Xenopus derives from constraints imposed by the environment (or the experimenter) and is unlikely a strategy for spatial learning or safety seeking.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
The exploratory behaviour of animals in unfamiliar environments is often characterized by a tendency to follow walls or distinct borders. Such wall following has been described in mice and rats (Treit and Fundytus 1988; Simon et al. 1994), where it is often experimentally used as a readout for the level of the animal’s anxiety (Walsh and Cummins 1976; Prut and Belzung 2003). Well-studied examples of such wall following include fruit flies and blind cavefish (Goetz and Biesinger 1985; Teyke 1989; Besson and Martin 2005; Liu et al. 2007). Different potential functions have been ascribed to wall following behaviours. In some cases, wall following might be a defensive strategy; for instance, avian predators likely have more difficulties catching, e.g., a rat when the latter is moving along a wall compared to when it is moving across an open field (Grossen and Kelley 1972). This explanation is supported by the fact that rats increase wall following in aversive situations (Grossen and Kelley 1972) and thus legitimate the use of wall following in rodents as an indicator of anxiety (Gentsch et al. 1987; Treit and Fundytus 1988; Simon et al. 1994). On the other hand, wall following can also serve as a strategy to learn the spatial setting of an environment. Blind cavefish, which live in dark caves without vision, explore unfamiliar environments by swimming along vertical borders and thereby memorize the layout of the surrounding based on information from their lateral line (Teyke 1989). A similar spatial learning has also been described in crayfish (Basil and Sandeman 2000) and humans (Kallai et al. 2005, 2007), suggesting that wall following is widely used for spatial orientation in vertebrates and invertebrates. However, wall following does not necessarily imply that animals use this behaviour explicitly as a defensive or exploratory strategy. In particular, simply observing a freely moving animal in a square or circular tank does not indicate whether the animal actively seeks the proximity to the wall, since other constraints such as small turning angles (Creed and Miller 1990) that prevent the animal from leaving the wall once it is encountered can lead to apparent wall following. A convex tank, on the other hand, can be used to clearly distinguish between ‘active’ and ‘passive’ wall following (terminology from Creed and Miller 1990). The convex curvature lets the animal choose whether to continue straight and leave the wall, or to turn and follow the wall; the latter is then termed active wall following, because the animal chooses to actively turn to remain close to the wall. If the animal leaves the wall at a convex curvature, on the other hand, it is not inherently attracted by the walls themselves, and its wall following in a square or concave environment is considered passive (i.e., barrier-driven); this latter behaviour has also been called ‘pseudothigmotaxis’ (Creed and Miller 1990). We will mostly use the term ‘barrier-driven’ to describe ‘passive’ wall following to avoid confusion with active/passive sensing. Active and passive/barrier-driven wall following can only be distinguished in a convex tank, but the classification can then be applied to wall following observed in differently shaped arenas.
To determine whether larvae and adults of the amphibian Xenopus laevis tend to swim along the walls of a tank, we quantified the swimming behaviour of these animals in a square tank. In addition, tadpole swimming trajectories were recorded in square tanks of different sizes to assess the influence of the size of the environment. Animals at different developmental stages—from small tadpoles (stage 46) to froglets—were employed to estimate the effect of different locomotor styles as well as the role of mechanoreceptive tentacles, which are transiently present at mid-larval stages and offer the possibility for mechanoreceptive guidance, in wall following. Finally, a convex tank allowed discriminating between active and barrier-driven wall following.
Materials and methods
Animals
Experiments were performed on tadpoles and froglets of the South African clawed toad X. laevis (n = 92) of either sex at developmental stages 46 to 66 (according to Nieuwkoop and Faber 1956). Each animal was only tested once at one particular developmental stage; moreover, while all animals were tested in the standard condition, some animals were also tested in specific conditions (see below). Developmental stages were identified based on morphological features in a petri dish under a dissection microscope.
Image data acquisition—hardware and software
Image data were acquired with two different monochrome cameras from Point Grey (Richmond, Canada; now FLIR Integrated Imaging Solutions) and Point Grey Image Acquisition software (Fly Capture). The camera was placed in the centre above the tank to record the animal’s movements in the horizontal plane. Videos obtained earlier in the course of the study were acquired using a Grasshopper Firewire camera (GRAS-03K2M-C) with a 640 × 480 resolution at 15 frames per second (fps). These videos were saved as JPG-compressed AVI files. Videos obtained later in the course of the study were acquired using a Grasshopper3 USB camera (GS3-U3-23S6M-C) with a maximum resolution of 1200 × 1200 pixels. The resolution was adjusted depending on animal and tank size, and varied from 600 × 600 to 1200 × 1200 pixels with a frame rate of either 15 or 30 fps. Acquired images were saved as LZW-compressed TIFF files. All image data were visually inspected in FIJI (Schindelin et al. 2012, 2015), which was also used to create overlays. Further data analysis was performed using Python 3 (Python Software Foundation, https://www.python.org/, see below for details).
Image data acquisition and experimental conditions
In the standard condition, one animal at a time was observed in a 19 × 19 cm Plexiglas tank with a water level of 0.5–1.4 cm (0.5 cm only for the smallest animals, otherwise 1.2–1.4 cm) at room temperature (20–24 °C). The vertical walls (20 cm high) of the tank were surrounded on the outer surface by white paper, and the tank was lit from below with four cold light sources placed on either side (ZLED CLS6000, ZETT OPTICS GmbH, Germany) or with a light box (Kaiser Slimlite LED, Kaiser Fototechnik, Buchen, Germany) that created an evenly lit area of 46.0 × 20.5 cm. After 1 min adaptation to the environment, a 10 min video sequence was recorded for each of the 92 animals.
In addition to the recordings of swimming behaviour in the 19 × 19 cm tank, a group of animals (n = 9, developmental stages 47–50, total length 18–37 mm) was also tested in a smaller square tank with floor dimensions of 7 × 7 cm. Animals were filmed for 10 min in each tank; the order of the tank sizes was small first for half of the tested animals, and large first for the other half. All images were acquired with the Point Grey Grasshopper3 camera at 15 fps.
To test for a potential influence of vision, a group of animals (n = 10, developmental stages 50–65, total length of the tadpoles 25–55 mm, froglets 12–17 mm) were filmed successively with both a white and a black paper surrounding the tank, for 10 min each, at a frame rate of 15 fps with the Grasshopper3 camera. The order of black/white was white first for five animals and black first for the other five. Another group of animals (n = 30, developmental stages 53–66, total length of the tadpoles 35–60 mm, froglets 15–21 mm) was filmed for 10 min both under normal light conditions (see above) and with infrared (IR) illumination (IR Illuminator, TV6700, EcoLine, 850 nm). Because the IR lights also emitted some red light (visible to a human observer), the IR condition most likely was not entirely dark for the animals. Previous studies of photoreceptors in Xenopus tadpoles and froglets, however, have not found any evidence for IR sensitivity (Witkovsky et al. 1981; Witkovsky 2000), indicating that the IR condition in the current study represented a considerably reduced light condition. Half of the animals experienced the normal light condition first, whereas the other half started with IR illumination. Original IR videos lasted 10.5 min and were reduced afterwards to 10 min by removing the first 30 s. The extra 30 s allowed the experimenter to leave the recording room without creating any potentially disturbing light during the 10 min test period. The luminance values of the different light conditions were measured with a Spectra Scan PR 655 (Photo Research Inc., Syracuse, NY, USA), which measures light with wavelengths between 380 and 780 nm. The IR lighting produced 0.03–0.06 cd/m2; the four cold light sources used for the black/white surround experiments produced 55–150 cd/m2, and the light box produced 2600–2900 cd/m2.
For the analysis of the swimming behaviour of animals in a convex tank, two of the straight walls of the 19 × 19 cm tank were covered with curvatures. Since the number of swimming episodes along the curved walls was limited, image acquisition was manually started and stopped. Occasionally, animals were gently touched at the tail to stimulate swimming towards the convex curvatures and to redirect the swimming trajectory once the animals got arrested in the concave part of the tank. Images were acquired with the Grasshopper3 camera at a frame rate of 15 fps. The animals’ trajectories obtained from the automated, objective tracking procedure (see below) were then classified as follows: A ‘trial’ of swimming along the wall towards a convex curve was considered as the animal entering a near wall zone (1.5 cm from the wall) along the wall at a distance produced by a horizontal tangential line through the apex of the convex curve. Trials were included independent of the body angles of the animal relative to the wall prior to reaching the curve. These trials were then classified as ‘along’, i.e., following the wall, if the animal left the wall on the opposite side of the curve within 1.5 cm of the wall, and as ‘straight’ if the animal left by crossing the connections of the 1.5 cm distance from the wall between the entry point and the apex (see “Results” for illustration). Trials were excluded if the animal left the way it entered or if it did not leave the near wall zone at the curve within 5 s or the end of the video episode. The proportion of trials in which the animal swam straight was then calculated for all animals with at least four trials.
Tracking of swimming trajectories
Data analysis was carried out by custom-written scripts using Python 3 in the spyder environment (https://github.com/spyder-ide/spyder, version 2.3.8). The main packages included openCV 3 (http://docs.opencv.org/3.0-beta/index.html, version 3.1.0), matplotlib (http://matplotlib.org/, version 1.5.1), numpy (http://www.numpy.org/, version 1.10.4), pandas (http://pandas.pydata.org/, version 0.18.0), and scipy (http://scipy.org/, version 0.17.0). Due to the variety of image file types, image resolution, animal size, illumination conditions, and compression quality, the strategy for tracking the animal differed between different sets of experiments. The main difference was that in some cases, background subtraction was carried out before thresholding the image, whereas in other cases, images were thresholded directly, either using a simple or a Gaussian threshold.
In contrast, the following steps applied to all cases. The contours of the animals were extracted and the largest contour was taken as the animal. X–Y positions were then calculated relative to the tank geometry. This transformation was achieved by warping the images to the four corners of the tank, which were manually determined. After trajectories were visually inspected, a plot of forward velocity and a video with the animal’s position were generated to ensure that the animal was tracked faithfully. Erroneously tracked frames were identified by visual inspection and spuriously high forward velocities, and their X–Y coordinates were interpolated. Such corrections were necessary in 36 video sequences, 22 of which were animals in the standard condition, with maximally 16 frames to interpolate. In some cases, none of the tracking strategies proved successful, leading to an exclusion of nine animals in the standard condition.
Further data analysis
From the X–Y position in the tank-warped images, parameters such as the distance covered during the swimming and the distance to the nearest wall were calculated. To avoid including jitter as animal movement, the trajectories were simplified with the Ramer–Douglas–Peucker algorithm (using the rdp python package, https://github.com/fhirschmann/rdp). The epsilon parameter, which determines the degree of simplification, was set to 10 in a 900 × 900 pixel video, and was scaled linearly to adjust for changes in the resolution. The simplified trajectory was then used to calculate the total distance which the animal covered during swimming. Only animals that covered a distance of at least one side length of the tank were included in the analysis; in the standard condition, this led to the exclusion of four animals. A distance of 15 mm from each of the four walls was chosen to define a ‘near wall’ area, and the proportion of time that the animal spent near the wall was calculated. While it is desirable to keep the ‘near wall’ threshold as small as possible, 15 mm was chosen to ensure that the tracked centroid of the large animals was still within that threshold when the animal was near a wall. The use of a distance threshold of 15 mm yielded a central area of 16 × 16 cm; accordingly, the ‘near wall’ area constituted 29.1% of the 19 × 19 cm tank.
When comparing different tank sizes (7 and 19 cm side length), the animals were compared with a 15 mm ‘near wall’ threshold—which might indicate the attractiveness of the wall independent of the size of the tank. However, since the ‘near wall’ area in the 7 × 7 cm tank constitutes 67.3% of the whole tank, the distribution of distances to the wall in both tanks was normalised to the maximum distance, and a threshold was chosen to define the ‘near wall’ area as intermediate in the proportion between the 29.1 and 67.3% that resulted from the 15 mm threshold. Therefore, 0.28 of the maximal distance from the wall was chosen as a threshold for defining the ‘near wall’ area independent of the tank’s size, yielding a ‘near wall’ area of 48% in both tanks, which was intermediate between the ‘near wall’ proportions based on the 15 mm threshold in the two differently sized tanks.
Code and data availability
The data and the python code used to analyse the data can be found in the supplementary information.
Statistics and figures
Parameters of interest were tested for normality using a Shapiro–Wilk test; the appropriate parametric or non-parametric tests were chosen accordingly, using an alpha value of 0.05. The distribution of the proportion of time spent near the wall of all animals in the standard condition was not normally distributed; therefore, Spearman rank correlations were used to test relationships to other parameters. Figures were assembled in Adobe Illustrator (Adobe Systems Incorporated, San Jose, USA).
Results
Swimming trajectories of tadpoles and young adult Xenopus
The swimming behaviour of animals in a square tank between pre-metamorphic stage 47 (larvae) and post-metamorphic stage 66 (froglets) was quantified by monitoring the animals’ trajectories over a period of 10 min in each individual (Fig. 1). Examples of animals at different developmental stages revealed a variety of swimming behaviours with respect to the walls of the tank. Independent of developmental stage, some animals exhibited trajectories that appeared to cover the entire tank (Fig. 2a–c), while others swam preferentially along the walls of the tank (e.g., Fig. 2d, g). To visualise the extent of wall following, the cumulative frequency of distances to the nearest wall over the 10 min period of swimming was plotted (see Fig. 1b). This graphical presentation is equivalent to a histogram of distances to the nearest wall that are summed up along the x-axis.

Example swimming trajectory and cumulative frequency distribution of a Xenopus tadpole’s distance to the nearest wall. a Minimum intensity projection showing the entire trajectory of a stage 54 tadpole (body length 3.6 cm) during swimming in a 19 × 19 cm tank over a 10 min period at a temporal resolution of 3 fps. b Cumulative frequency distribution of the animal’s distance to the nearest wall; note that the animal spent over 75% of the time within 15 mm of the nearest wall (dashed lines); the inset shows the tracked trajectory

Example swimming trajectories of larval and adult Xenopus at different developmental stages. a–h Reconstructed trajectories during swimming in a 19 × 19 cm tank over a 10 min period of two animals, respectively, at stage 48 (a, b), stage 56 (c, d), and stage 59 (e, f), and of two froglets at stage 66 (g, h). Note the variability of the trajectories of animals at the same developmental stage. The size of the animal schemes on the left (from Hänzi and Straka 2016) is not related to the spatial dimensions of the trajectories
The cumulative frequencies of distances to the nearest wall for all tested animals (n = 79) are shown in Fig. 3a. The proportion of time that the animals spent near the wall (within a distance of 15 mm from the walls) was taken as a measure of the strength of wall following. As a group, the 79 animals differed significantly from the proportion that could be expected from the ‘near wall’ area (29%, Fig. 3b, Wilcoxon signed-rank test, p < 0.0001). Five animals, however, spent less than 29% of their time near the wall, which is the proportion of the ‘near wall’ area. Four of these were of developmental stage 48 or below and this tied in well with the impression that the strength of wall following increased with developmental stage (Fig. 3c, Spearman’s rank correlation between stage and proportion near the wall, ρ = 0.48, p < 0.0001, n = 79), suggesting that Xenopus larvae/froglets become stronger wall followers during ontogeny.

Characterisation of wall following of larval and young adult Xenopus during swimming in a square tank. a Cumulative frequency distributions of the distance to the nearest wall during swimming of tadpoles and froglets (n = 79) for 10 min in a 19 × 19 cm tank; traces are colour-coded with respect to developmental stage (colour-code on the right); dashed black line indicates the threshold of the ‘near wall’ area (15 mm). b Proportion of time that the animals spent near the wall from the data shown in a as colour-coded dots and as a boxplot. The expectation of how much time the animals would spend near the wall based on the ‘near wall’ area as a proportion of the total area is shown on the right. The animals’ proportions were significantly different from this expectation (Wilcoxon signed-rank test, p < 0.0001, n = 79). c Relationship between proportion of time that the animals spent near the wall and the developmental stage of the tested animals (n = 79); note the significant Spearman’s rank correlation between stage and one-sample KS statistics (n = 79, ρ = 0.48, p < 0.0001), indicating that older animals are stronger wall followers. d Separate proportion of the time that the animal spent near the wall for each quarter of the 10 min swimming episode shown in a (n = 79, colour-coded for developmental stage). The median across all animals is shown as a thick black line. These proportions did not change significantly across the four quarters of the 10 min swimming period (Friedman test, p = 0.29). e Relationship between the proportion that the animals spent near the wall and the total distance covered by an animal over the 10 min swimming period (colour-coded for developmental stage). The absence of significance (Spearman’s rank correlation, ρ = 0.03, p = 0.77) indicates that total covered distance is not a confounding factor for the degree of wall following as measured by the proportion of the time spent near the wall. The dashed line in c–e indicates the ‘near wall’ area as a proportion of the total tank area. Schemes of Xenopus in a from (Hänzi and Straka 2016)
To reveal potential changes in wall following behaviour in individual animals over the 10 min test period, the respective proportions of time spent near the wall were separately calculated for the four quarters of the swimming period (Fig. 3d). Since the proportions of the four quarters were not significantly different from each other (Fig. 3d, Friedman test, p = 0.29), the individual wall following strategy of a particular animal persisted over the entire test period. Moreover, the total distance covered within the 10 min was no confounding factor for wall following, since the rank correlation between the total length of the trajectory and the proportion of time spent near the wall was not significant (Fig. 3e, Spearman’s rank correlation, ρ = 0.03, p = 0.77).
Role of tentacles in wall following behaviour
During larval development between stage 51 and 60, X. laevis tadpoles transiently possess a mobile pair of rod-like appendages that protrude from the corners of their mouths (Nieuwkoop and Faber 1956). These appendages might be necessary or at least advantageous for wall following, given the presence of Merkel cells, potentially assigning a tactile function to these tentacles (Ovalle 1979; Ovalle et al. 1998). However, contrasting with the normal development, a number of animals from our breeding facility failed to naturally develop noticeable tentacles. This allowed to directly test the influence of tentacles on the degree of wall following. Accordingly, the swimming behaviour of a population of tadpoles at developmental stages 54–60 without appendages (n = 11) was compared with that of a stage-matched group of tadpoles (n = 13) that possessed tentacles with a length of at least 3 mm.
Statistical analysis of the swimming behaviour as reported above indicated that both populations of animals had a similar propensity for wall following (blue and red traces in Fig. 4a). This is demonstrated by the overlapping distributions of the cumulative frequencies of distances to the nearest wall in animals with and without tentacles (blue and red traces in Fig. 4a). The proportions of time that these animals spent near the wall were not significantly different between animals with and without tentacles (Fig. 4b, Mann–Whitney U test, p = 0.09). If anything, animals without tentacles were located closer to the wall than animals with tentacles (see blue and red traces in inset in Fig. 4a). This likely derives from the fact that the presence of tentacles creates an additional distance of the tadpole with respect to the wall that is not present in animals without tentacles. Tentacles are, therefore, no prerequisite for wall following.

Influence of tentacles on wall following during swimming in Xenopus larvae. a Cumulative frequency distributions of the distance to the nearest wall of animals with tentacles (red, n = 13) and of animals without tentacles (blue, n = 11) between developmental stages 54–60; the inset is a higher magnification of the initial part of the cumulative frequency distribution and shows that tadpoles without tentacles (blue) align closer with the wall compared to tadpoles with tentacles (red). b Proportion of the time that the animals with and without tentacles spent near the wall; the two groups were not significantly different (Mann–Whitney U test, p = 0.09)
Wall following under different luminance conditions
The wall following of Xenopus larvae/froglets analysed above was further examined during swimming under different illumination conditions, which could have facilitated or impaired wall detection. A potential influence of the visual system was, therefore, evaluated in a set of experiments where the swimming of stage 50–65 tadpoles/froglets (n = 10) was compared in a tank in which the four walls were covered on the outside by a white or a black background (Fig. 5a, b). We hypothesised that the animals did not perceive the white surround as an obstacle, but we expected the animals to be able to visually perceive the black surround as an obstacle. Analysis of the swimming behaviour indicated that the propensity for wall following was not related to the background (Fig. 5b) based on the proportions of time that each animal spent near the wall in the two conditions (paired t test, p = 0.59). In another set of experiments, the swimming behaviour of tadpoles/froglets (n = 30, stage 53–66) was tested under both white light (cold light source) and infrared illumination (850 nm, Fig. 5c, d). Analysis of the proportion of time spent near the wall revealed no significant difference between the two conditions (Fig. 5d, paired Wilcoxon signed-rank test, p = 0.47), indicating that the reduced light level during infrared illumination had no effect on wall following.

Influence of illumination conditions on wall following during swimming in Xenopus larvae. a Cumulative frequency distributions of the distance to the nearest wall during swimming of stage 50–65 tadpoles/froglets (n = 10) over a 10 min period in a 19 × 19 cm tank surrounded by black (black traces) or white paper (white traces). b Proportion of time that the animals spent near the wall (within 15 mm) for swimming in the tank surrounded by black (left) or white (right) paper. The proportions in these two conditions were not significantly different (paired t test, p = 0.59). c Cumulative frequency distributions of the distance to the nearest wall during swimming of stage 53–66 tadpoles/froglets (n = 30) over a 10 min period in a 19 × 19 cm tank illuminated either with cold light (light, black traces) or infrared light (IR, red traces). d Proportion of the time that the animals spent near the wall (within 15 mm) for swimming in the tank with cold light (left) or IR light (right). The proportions in these two illumination conditions were not significantly different (paired Wilcoxon signed-rank test, p = 0.47)
Influence of tank size on wall following
Wall following might be influenced by the size of the environment. To test whether the wall is equally attractive independent of the size of the tank, animals of developmental stages 47–50 (n = 9, total length 18–37 mm) were tested both in a 19 × 19 cm and in a 7 × 7 cm tank. The cumulative frequency distributions of distances to the nearest wall suggest that the animals spend more time near the wall in the smaller tank (Fig. 6a). This is confirmed by comparing the proportion of time that the animals spent near the wall (within 15 mm of the wall) in the two tanks: the proportions in the small tank are significantly larger (Fig. 6b, paired Wilcoxon signed-rank test, p = 0.0078). This suggests that the wall is more attractive in the smaller tank. However, the ‘near wall’ area (within 15 mm of the wall) is also relatively larger in the smaller tank (67.3% of the total area in the 7 × 7 cm tank vs. 29.1% of the total area in the 19 × 19 cm tank). To compare wall following on the same scale, the distances to the wall were normalised to their maximum, and a threshold was chosen that resulted in an intermediate ‘near wall’ area (threshold of 28% of the maximal distance to the wall, resulting in a ‘near wall’ area of 48% of the total tank area; Fig. 6c). The proportion of time spent in these area-normalised ‘near wall’ areas was again significantly larger in the smaller tank (Fig. 6d, paired Wilcoxon signed-rank test, p = 0.0078). The animals are, therefore, stronger wall followers in the smaller tank also when taking into account the differences in area.

Influence of tank size on wall following. a Cumulative frequency distributions of the distance to the nearest wall during swimming of stage 47–50 tadpoles (n = 9) over a 10 min period in a 7 × 7 cm tank (green) and in a 19 × 19 cm tank (blue). The ‘near wall’ threshold (15 mm) is shown as a black dashed line. The trajectories of a stage 50 tadpole (3.2 cm body length) are shown as insets. b Proportion of time that the animals in a spend near the wall (within 15 mm); the two groups were significantly different (paired Wilcoxon signed-rank test, p = 0.0078, n = 9). c Same data as in a but normalised to the maximal distance to the wall. The black dashed line indicates the threshold (28% of the maximal distance to the wall) that yields a ‘near wall’ area intermediate to what 15 mm yields in the 7 and 19 cm tank (see “Materials and methods”). d Proportion of time which the animals spend near the wall (within 28% of the maximal distance) in the tanks with a side length of 7 and 19 cm; the two groups were significantly different (paired Wilcoxon signed-rank test, p = 0.0078, n = 9)
Wall following is barrier-driven
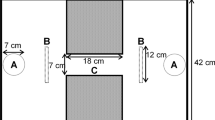
Wall following might be either active such as in blind cavefish, when the animal chooses to turn to follow a convex wall, or passive/barrier-driven (distinction according to Creed and Miller 1990). To distinguish between the two possibilities in larval and adult Xenopus, the swimming behaviour was tested in a specifically designed tank (Fig. 7a). The use of a tank in which two of the four walls had convex curvatures allowed testing if tadpoles seek wall touch during swimming actively or whether wall following in the square environment was passive/barrier-driven (red and blue arrows in Fig. 7a). The proportion of trials when animals swam straight after encountering a convex curve was classified based on the trajectories (Fig. 7b, example trajectories in Fig. 7d). The majority of tested tadpoles swam straight in all trials (Fig. 7f) more or less independent of their developmental stage (Fig. 7e, f, n = 20), leading to the conclusion that Xenopus tadpoles and froglets do not actively turn to follow a wall, and their wall following in a square environment is, therefore, barrier-driven.

Wall following is barrier-driven. a Tank (19 × 19 cm) with two convex walls to distinguish if wall following is active (red arrows) or passive/barrier-driven (blue arrows). b Scheme explaining the classification of trajectories exemplified for those cases when the animal starts in the bottom right corner. A trial starts when the animal crosses into a near wall area around the convex curve (black arrow). A trial is classified as ‘along the wall’ if the animal leaves this area along the wall on the other side (red arrow) and as ‘straight’ if it leaves the near wall area towards the top (blue arrows). The grey line represents the horizontal tangential line through the peak of the convex curve used to determine the width of the near wall area around the curve. c Minimum intensity overlay (at a frame rate of 3 fps) of two swimming trajectories along the curved walls of a stage 55 tadpole; blue arrows indicate the animal’s direction of swimming. d Example trajectories of trials from a stage 57 tadpole starting in the top left corner; the animal swam along the curve once (red), but otherwise left the wall near the convex curve (blue). e Proportion of trials with straight swimming and departure from the wall in animals at different developmental stages. The size of the circle is proportional to the number of trials per animal (minimum 4, maximum 19), and the darker colour indicates overlay of different animals. f Boxplot of the proportion of straight swimming across all animals (n = 20). In e and f, only animals with at least 4 trials were included
Discussion
Xenopus laevis—from small tadpoles to froglets—tended to follow the wall when swimming in a square tank. The strength of wall following increased with development and smaller tank size and was not confounded by the total distance that an animal covered. The transient presence of mechanosensory tentacles at mid-larval stages did not lead to stronger wall following compared to animals that naturally did not develop these appendages. In addition, vision was unlikely a main driver of wall following, as surrounding the tank by black paper or white paper or changing the light to infrared illumination did not change the strength of wall following. Wall following was barrier-driven as indicated by straight swimming in a tank with convex curvatures. This indicated that wall following in Xenopus was likely imposed by the square environment. Wall following being barrier-driven might also explain why it persisted across metamorphosis and was present in both tadpoles and froglets, independent of their very different locomotor styles.
Classification and different types of wall following
Wall following in concave environments has been described for a wide variety of animals including crustaceans such as crayfish (Basil and Sandeman 2000), insects such as cockroaches (Okada and Toh 2000), fishes such as goldfish (Kato et al. 1996), or salmon (Clements et al. 2002), as well as several rodent species (Wilson et al. 1976; Webster et al. 1979). In our study, we used the term wall following, because it is independent of the involvement of a particular sensory modality such as touch in thigmotaxis or vision in centrophobism. Square or circular environments usually employed in laboratory studies are unnatural (Cheng 2005; Benjamini et al. 2010), and prevent judging whether the walls attract the animals or whether other constraints lead to wall following. The inability to execute large turns, for instance, can lead to strong wall following in a rectangular environment (Creed and Miller 1990). In contrast, an environment with convex borders allows distinguishing between passive, barrier-driven, and active wall following (Creed and Miller 1990). Animals perform active wall following when voluntarily seeking out the proximity to a wall and turn at a convex curve to remain near the wall. Barrier-driven wall following occurs when animals leave the wall at a convex curve but follow the walls in a concave or square environment.
Persistence of wall following with development in Xenopus
Wall following in a square tank was present at all developmental stages, from small to large tadpoles as well as in post-metamorphic froglets; the strength of wall following was weakest, however, in the smallest tadpoles, stronger, with considerable variations in larger tadpoles and consistently present in froglets. This persistence suggests that wall following is not a behavioural strategy only employed by tadpoles or frogs, and is not linked to a particular locomotor style such as undulatory tail-based propulsion or leg-based swimming. Moreover, wall following in a convex tank was barrier-driven in all tested animals (see below). The weaker wall following in young larvae is noticeable and might be related to the somewhat different swimming style of these animals (see Fig. 3a in Hänzi and Straka 2017), where the rotation axis of the left–right head undulations oscillates between positions outside the animal; this contrasts with the situation in larger tadpoles where the head oscillations during swimming occur around a single central axis (Lambert et al. 2009). This difference in swimming style might facilitate turns away from a vertical wall in young larvae and explain the weaker wall following. At intermediate larval stages [stage 51–60 according to Nieuwkoop and Faber (1956)], tadpoles normally possess a pair of mobile appendages protruding from the corners of their mouths, which are retracted during undulatory swimming (Hänzi et al. 2015). These tentacles—like other skin areas—possess mechanoreceptive Merkel cells (Ovalle 1979; Nurse et al. 1983; Ovalle et al. 1998), and, therefore, these appendages likely serve a tactile function when the animal is stationary or cruising slowly with tentacles extended forward. Accordingly, these tentacles might be used to explore the environment in a way that is similar to rodents’ whiskers but simpler, because the structure is not as specialised. However, younger larvae and older animals at metamorphic climax (> stage 61) that do not possess tentacles were overall similar in their wall following tendencies, as were animals that for unknown reasons did not develop tentacles (Fig. 4). While this does not exclude that—when present—tentacles are used for tactile exploration, it shows at least that tentacles are not necessary for wall following, and if tactile exploration is needed, tadpoles might also use their facial skin.
Effects of vision and size of the environment
As mentioned above, some rodent species leave the walls and venture much more into open space in darkness than in light; this is true not only for the common spiny mouse (Eilam 2004) but also for rats (Nasello et al. 1998), some types of gerbil (Zadicario et al. 2005) and wild-caught prairie deer mice (Brillahart and Kaufman 1991). Some rodents also adjust their foraging behaviour in laboratory or natural conditions, such that they venture more into the open in the dark (Price et al. 1984; Diaz 1992; Vasquez 1996), and some authors also assign a role of vision in the avoidance of open spaces by rats (Cardenas et al. 2001; Martínez et al. 2002). However, tadpoles and froglets of X. laevis did not show stronger wall following in light than under infrared illumination, to which photoreceptors in Xenopus tadpoles and froglets are insensitive (Witkovsky et al. 1981; Witkovsky 2000). Even though the employed IR illumination contained low levels of the spectrum visible to Xenopus tadpoles, IR illumination nevertheless represented a condition with considerably reduced light and influence of vision. Unlike, in many rodent species, centrophobism or visually driven fear of open spaces is, therefore, very unlikely to be the driving force behind wall following in Xenopus.
A range of different arena sizes have been used in rodent open field tests (Walsh and Cummins 1976), and the geometry of the environment has shown to influence path shapes of rats not only at the perimeter but also at the centre of an environment (Yaski et al. 2011). A wall can exert both a guiding and attracting influence on mouse behaviour from quite some distance (Horev et al. 2007). When tested in arenas of different size, social voles spend more time near the wall in larger arenas (Eilam et al. 2003; Eilam 2003)—possibly because the larger open space is perceived as more dangerous than a smaller, more enclosed open space. This contrasts with the behaviour of Xenopus described here, which are stronger wall followers in smaller tanks. It, therefore, seems likely that wall following in Xenopus is imposed by the constraints of the environment, whereas wall following in social voles is driven by the visual system and serves as a defensive strategy. Moreover, thigmotaxis is unlikely to be the main driving force behind wall following in either of the two cases, since different tank/arena sizes would have no impact on wall following if thigmotaxis was the underlying cause (Eilam et al. 2003)—with thigmotaxis as the main driver, the walls would be equally attractive independent of the arena size.
Active versus passive/barrier-driven wall following
To the best of our knowledge, no other study described passive/barrier-driven wall following so far. Potential reasons include that only few studies use convex tanks, and that passive wall following might be considered a negative finding and not be reported. The few wall following studies used convex enclosures to discriminate active from passive wall following: In blind cavefish, for instance, wall following is clearly active (Sharma et al. 2009; Patton et al. 2010). These animals are blind, live in dark caves, and use their lateral line system as a near range sense to obtain information about their environment. In a convex tank, they actively follow the wall, because they would not be able to orient otherwise. In contrast, Xenopus tadpoles and froglets leave the wall at a convex curve, thereby leaving the range in which the lateral line can be used to sense the wall. Adult fruit flies, on the other hand, leave the wall in more than 50% of the trials; their preference for walls in circular arenas seems to derive from a preference for the boundaries of the environment (Soibam et al. 2012). In contrast to fruit flies, cockroaches have antennae that can be longer than their body (Camhi and Johnson 1999). These animals use these mechanoreceptive sensors to gain information about their nearby environment. Cockroaches thus have been described as thigmotactic in concave environments (Camhi and Johnson 1999; Jeanson et al. 2003) and show positive thigmotaxis towards objects that are touched by the antennae (Okada and Toh 2000). When running along a wall, these animals constantly touch the wall with one of their antennae (Camhi and Johnson 1999). However, when arriving at a convex curve, they leave the curve in about 50% of the trials (Creed and Miller 1990). Xenopus tadpoles possessing tentacles leave the wall even more frequently, thereby literally ‘losing touch’ with the wall. Tadpoles and froglets, therefore, leave the wall at convex curvatures despite losing both touch and lateral line information about the wall by going straight.
Active wall following in blind cavefish certainly serves as a spatial exploration and spatial learning strategy (Teyke 1989), and to a certain extent, this might also be true for cockroaches or fruit flies. Similar wall following that serves to collect information about the environment, leading to spatial learning, also occurs in crayfish (Basil and Sandeman 2000), blind mole rats (Avni et al. 2008), and blindfolded humans (Kallai et al. 2007; Yaski et al. 2009). Another use of wall following, namely defence, has also been described, especially in rodents (Grossen and Kelley 1972; Whishaw et al. 2006), where it has been related to anxiety, as well (Treit and Fundytus 1988; Simon et al. 1994; Prut and Belzung 2003). In contrast, wall following in X. laevis is barrier-driven and, therefore, unlikely to serve as a specific protective or exploratory strategy or a behaviour that is related to anxiety. A number of factors potentially influencing wall following such as changes in illumination or the presence of tentacles were shown to play no major role for wall following in Xenopus. Instead, wall following in these animals was barrier-driven and might be due to the particularity of the rather unnatural and concave test environment. This thus suggests that spatially more complex and natural environments likely would yield richer behaviours (see also Benjamini et al. 2010; Cheng 2005).
References
Avni R, Tzvaigrach Y, Eilam D (2008) Exploration and navigation in the blind mole rat (Spalax ehrenbergi): global calibration as a primer of spatial representation. J Exp Biol 211:2817–2826. https://doi.org/10.1242/jeb.019927
Basil J, Sandeman D (2000) Crayfish (Cherax destructor) use tactile cues to detect and learn topographical changes in their environment. Ethology 106:247–259. https://doi.org/10.1046/j.1439-0310.2000.00524.x
Benjamini Y, Lipkind D, Horev G et al (2010) Ten ways to improve the quality of descriptions of whole-animal movement. Neurosci Biobehav Rev 34:1351–1365. https://doi.org/10.1016/j.neubiorev.2010.04.004
Besson M, Martin JR (2005) Centrophobism/thigmotaxis, a new role for the mushroom bodies in Drosophila. J Neurobiol 62:386–396. https://doi.org/10.1002/neu.20111
Brillahart DB, Kaufman DW (1991) Influence of illumination and surface structure on space use by prairie deer mice (Peromyscus maniculatus bairdii). J Mammal 72:764–768. https://doi.org/10.2307/1381840
Camhi JM, Johnson EN (1999) High-frequency steering maneuvers mediated by tactile cues: antennal wall-following in the cockroach. J Exp Biol 202:631–643
Cardenas F, Lamprea MR, Morato S (2001) Vibrissal sense is not the main sensory modality in rat exploratory behavior in the elevated plus-maze. Behav Brain Res 122:169–174. https://doi.org/10.1016/S0166-4328(01)00180-2
Cheng K (2005) Reflections on geometry and navigation. Conn Sci 17:5–21. https://doi.org/10.1080/09540090500138077
Clements S, Schreck CB, Larsen DA, Dickhoff WW (2002) Central administration of corticotropin-releasing hormone stimulates locomotor activity in juvenile chinook salmon (Oncorhynchus tshawytscha). Gen Comp Endocrinol 125:319–327. https://doi.org/10.1006/gcen.2001.7707
Creed RP, Miller JR (1990) Interpreting animal wall-following behavior. Experientia 46:758–761. https://doi.org/10.1007/BF01939959
Diaz M (1992) Rodent seed predation in cereal crop areas of central Spain: effects of physiognomy, food availability, and predation risk. Ecography (Cop) 15:77–85. https://doi.org/10.1111/j.1600-0587.1992.tb00011.x
Eilam D (2003) Open-field behavior withstands drastic changes in arena size. Behav Brain Res 142:53–62. https://doi.org/10.1016/S0166-4328(02)00382-0
Eilam D (2004) Locomotor activity in common spiny mice (Acomys cahirinuse): the effect of light and environmental complexity. BMC Ecol 4:16. https://doi.org/10.1186/1472-6785-4-16
Eilam D, Dank M, Maurer R (2003) Voles scale locomotion to the size of the open-field by adjusting the distance between stops: a possible link to path integration. Behav Brain Res 141:73–81. https://doi.org/10.1016/S0166-4328(02)00322-4
Gentsch C, Lichtsteiner M, Feer H (1987) Open field and elevated plus-maze: A behavioural comparison between spontaneously hypertensive (SHR) and Wistar–Kyoto (WKY) rats and the effects of chlordiazepoxide. Behav Brain Res 25:101–107. https://doi.org/10.1016/0166-4328(87)90003-9
Goetz KG, Biesinger R (1985) Centrophobism in Drosophila melanogaster. J Comp Physiol A 156:319–327. https://doi.org/10.1007/BF00610726
Grossen NE, Kelley MJ (1972) Species-specific behavior and acquisition of avoidance behavior in rats. J Comp Physiol Psychol 81:307–310. https://doi.org/10.1037/h0033536
Hänzi S, Straka H (2016) Schemes of Xenopus laevis tadpoles. Figshare https://doi.org/10.6084/m9.figshare.3841173
Hänzi S, Straka H (2017) Developmental changes in head movement kinematics during swimming in Xenopus laevis tadpoles. J Exp Biol 220:227–236. https://doi.org/10.1242/jeb.146449
Hänzi S, Banchi R, Straka H, Chagnaud BP (2015) Locomotor corollary activation of trigeminal motoneurons: coupling of discrete motor behaviors. J Exp Biol 218:1748–1758. https://doi.org/10.1242/jeb.120824
Horev G, Benjamini Y, Sakov A, Golani I (2007) Estimating wall guidance and attraction in mouse free locomotor behavior. Genes Brain Behav 6:30–41. https://doi.org/10.1111/j.1601-183X.2006.00216.x
Jeanson R, Blanco S, Fournier R et al (2003) A model of animal movements in a bounded space. J Theor Biol 225:443–451. https://doi.org/10.1016/S0022-5193(03)00277-7
Kallai J, Makany T, Karadi K, Jacobs WJ (2005) Spatial orientation strategies in Morris-type virtual water task for humans. Behav Brain Res 159:187–196. https://doi.org/10.1016/j.bbr.2004.10.015
Kallai J, Makany T, Csatho A et al (2007) Cognitive and affective aspects of thigmotaxis strategy in humans. Behav Neurosci 121:21–30. https://doi.org/10.1037/0735-7044.121.1.21
Kato S, Tamada K, Shimada Y, Chujo T (1996) A quantification of goldfish behavior by an image processing system. Behav Brain Res 80:51–55. https://doi.org/10.1016/0166-4328(96)00018-6
Lambert FM, Beraneck M, Arama J et al (2009) Differential swimming dynamics during Xenopus ontogeny: implications for gaze stabilization. Soc Neurosci Abstr 813.13
Liu L, Davis RL, Roman G (2007) Exploratory activity in Drosophila requires the kurtz nonvisual arrestin. Genetics 175:1197–1212. https://doi.org/10.1534/genetics.106.068411
Martínez JC, Cardenas F, Lamprea M, Morato S (2002) The role of vision and proprioception in the aversion of rats to the open arms of an elevated plus-maze. Behav Processes 60:15–26. https://doi.org/10.1016/S0376-6357(02)00102-X
Nasello AG, MacHado C, Bastos JF, Felicio LF (1998) Sudden darkness induces a high activity-low anxiety state in male and female rats. Physiol Behav 63:451–454. https://doi.org/10.1016/S0031-9384(97)00462-9
Nieuwkoop PD, Faber J (1956) Normal table of Xenopus laevis (Daudin). North-Holland Publishing Company, Guilders
Nurse CA, Mearow KM, Holmes M et al (1983) Merkel cell distribution in the epidermis as determined by quinacrine fluorescence. Cell Tissue Res 228:511–524. https://doi.org/10.1007/BF00211472
Okada J, Toh Y (2000) The role of antennal hair plates in object-guided tactile orientation of the cockroach (Periplaneta americana). J Comp Physiol A 186:849–857. https://doi.org/10.1007/s003590000137
Ovalle W (1979) Neurite complexes with Merkel cells in larval tentacles of Xenopus laevis. Cell Tissue Res 204:233–241
Ovalle W, Shinn S, Nahirney P (1998) Ultrastructure of the larval tentacle and its skeletal muscle in Xenopus laevis. Tissue Cell 30:216–225
Patton P, Windsor S, Coombs S (2010) Active wall following by Mexican blind cavefish (Astyanax mexicanus). J Comp Physiol A 196:853–867. https://doi.org/10.1007/s00359-010-0567-8
Price MV, Waser NM, Bass TA (1984) Effects of moonlight on microhabitat use by desert rodents. J Mammal 65:353–356. https://doi.org/10.2307/1381183
Prut L, Belzung C (2003) The open field as a paradigm to measure the effects of drugs on anxiety-like behaviors: a review. Eur J Pharmacol 463:3–33. https://doi.org/10.1016/S0014-2999(03)01272-X
Schindelin J, Arganda-Carreras I, Frise E et al (2012) Fiji: an open-source platform for biological-image analysis. Nat Methods 9:676–682. https://doi.org/10.1038/nmeth.2019
Schindelin J, Rueden CT, Hiner MC, Eliceiri KW (2015) The ImageJ ecosystem: an open platform for biomedical image analysis. Mol Reprod Dev 82:518–529. https://doi.org/10.1002/mrd.22489
Sharma S, Coombs S, Patton P, De Perera TB (2009) The function of wall-following behaviors in the Mexican blind cavefish and a sighted relative, the Mexican tetra (Astyanax). J Comp Physiol A 195:225–240. https://doi.org/10.1007/s00359-008-0400-9
Simon P, Dupuis R, Costentin J (1994) Thigmotaxis as an index of anxiety in mice. Influence of dopaminergic transmissions. Behav Brain Res 61:59–64
Soibam B, Mann M, Liu L et al (2012) Open-field arena boundary is a primary object of exploration for Drosophila. Brain Behav 2:97–108. https://doi.org/10.1002/brb3.36
Teyke T (1989) Learning and remembering the environment in the blind cave fish Anoptichthys jordani. J Comp Physiol A 164:655–662. https://doi.org/10.1007/BF00614508
Treit D, Fundytus M (1988) Thigmotaxis as a test for anxiolytic activity in rats. Pharmacol Biochem Behav 31:959–962
Vasquez RA (1996) Patch utilization by three species of Chilean rodents differing in body size and mode of locomotion. Ecology 77:2343–2351. https://doi.org/10.2307/2265736
Walsh RN, Cummins RA (1976) The open-field test: A critical review. Psychol Bull 83:482–504. https://doi.org/10.1037/0033-2909.83.3.482
Webster DG, Baumgardner DJ, Dewsbury DA (1979) Open-field behaviour in eight taxa of muroid rodents. Bull Psychon Soc 13:90–92. https://doi.org/10.3758/BF03335022
Whishaw IQ, Gharbawie OA, Clark BJ, Lehmann H (2006) The exploratory behavior of rats in an open environment optimizes security. Behav Brain Res 171:230–239. https://doi.org/10.1016/j.bbr.2006.03.037
Wilson RC, Vacek T, Lanier DL, Dewsbury DA (1976) Open-field behavior in muroid rodents. Behav Biol 17:495–506. https://doi.org/10.1016/S0091-6773(76)90901-9
Witkovsky P (2000) Photoreceptor classes and transmission at the photoreceptor synapse in the retina of the clawed frog, Xenopus laevis. Microsc Res Tech 50:338–346. 10.1002/1097-0029(20000901)50:5<338::AID-JEMT3>3.0.CO;2-I
Witkovsky P, Levine JS, Engbretson GA et al (1981) A microspectrophotometric study of normal and artificial visual pigments in the photoreceptors of Xenopus laevis. Vis Res 21:867–873. https://doi.org/10.1016/0042-6989(81)90187-5
Yaski O, Portugali J, Eilam D (2009) The dynamic process of cognitive mapping in the absence of visual cues: human data compared with animal studies. J Exp Biol 212:2619–2626. https://doi.org/10.1242/jeb.030700
Yaski O, Portugali J, Eilam D (2011) Arena geometry and path shape: When rats travel in straight or in circuitous paths? Behav Brain Res 225:449–454. https://doi.org/10.1016/j.bbr.2011.07.055
Zadicario P, Avni R, Zadicario E, Eilam D (2005) “Looping”—an exploration mechanism in a dark open field. Behav Brain Res 159:27–36. https://doi.org/10.1016/j.bbr.2004.09.022
Acknowledgements
Larvae and adults of X. laevis were obtained from in-house breeding at the Biocenter of the Ludwig-Maximilians-University Munich, where animals were kept in aerated tanks at 17 °C on a 12:12 h light:dark cycle. The authors thank all members of the Straka lab for the feedback and discussion.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Funding
This study was funded by the German Science Foundation (STR 478/3-1) and the German Federal Ministry of Education and Research under the grant number 01 EO 0901
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
All behavioural observations complied with the “Principles of animal care”, publication No. 86-23, revised 1985 of the National Institute of Health. Permission for experiments subjected to approval was granted by the Regierung von Oberbayern (55.2-1-54-2532.3-59-12).
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Hänzi, S., Straka, H. Wall following in Xenopus laevis is barrier-driven. J Comp Physiol A 204, 183–195 (2018). https://doi.org/10.1007/s00359-017-1227-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00359-017-1227-z