
Abstract
In comparison to other insects, like honeybees, bumblebees are very effective pollinators. Even though landing is a crucial part of pollination, little is known about how bumblebees orchestrate the final, critical moments of landing. Here, we use high-speed recordings to capture the fine details of the landing behaviour of free-flying bumblebees (Bombus terrestris), while landing on a flat platform with different orientations. We find that the bees have a fairly constant body and head orientation at the moment of leg extension, irrespective of platform tilt. At the same moment in time, the distance to the platform is held constant at around 8 mm (with the exception of low platform tilts). The orientation of the antennae and the first appendage that touches the platform vary between platform orientations, while the duration of the hover phase does not. Overall, the final moments of landing in bumblebees and their close relatives, the honeybees, are similar. However, the distance to the platform at the moment of leg extension and the duration of the hover phase are different in bumblebees and honeybees, suggesting that they are primarily adapted to land on surfaces with different orientations.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Over the course of a single day, a bumblebee worker may land on up to 6000 flowers to collect nectar and pollen for her hive mates (Abrol 2011). To land safely on the surface of the flower, she has to slow down, extend her legs at the right moment in time and adjust the angle of her body according to the orientation of the flower.
Several insect species use visual motion cues generated by the landing surface to regulate deceleration during the approach to a surface (Wagner 1982; Srinivasan et al. 2000; Breugel and Dickinson 2012; Baird et al. 2013). Honeybees, for example, reduce flight speed when flying towards vertical surfaces by keeping the rate of expansion of the image of the approaching surface constant, ensuring that they automatically reduce their speed to near zero just before touchdown (Baird et al. 2013). This strategy may in fact be universal and is likely used when approaching surfaces of any orientation (Baird et al. 2013). Free-flying houseflies initiate their final deceleration before landing when the ratio of the image size to the rate of expansion of the landing surface reaches a certain value (Wagner 1982). Furthermore, fruit flies initiate deceleration during the approach to a surface when the rate of the landing target’s expansion reaches a critical value (Breugel and Dickinson 2012).
To ensure a smooth touchdown, it is important that the insect extends its legs in time before making contact with the surface. Leg extension has been studied in several different fly species (blow flies: Goodman 1960; houseflies: Borst 1986; fruit flies: Tammero and Dickinson 2002; Breugel and Dickinson 2012), in honeybees (Evangelista et al. 2009), and recently in nocturnal rainforest bees and bumblebees (Baird et al. 2015). These studies have shown that leg extension during landing is also mediated by visual input generated by the landing surface. Fruit flies, for example, extend their legs when the landing surface reaches a critical retinal size of about 60° (Breugel and Dickinson 2012). Baird et al. (2015) recently showed that the timing of the leg extension reflex in bumblebees is affected by light intensity—as it gets darker, the legs are extended later, often causing them to crash into the landing surface—indicating the importance of vision for this behaviour.
Some insects, like honeybees (Evangelista et al. 2009) and hawk moths (Pfaff and Varjú 1991) hover (remain in one place in the air) for a short while before they make contact with a surface. By hovering in front of a flower, bees are able to discriminate between rewarding and unrewarding flowers, sometimes only briefly touching the flower with the antennae or the legs (Goulson et al. 2001). In honeybees, this hover phase is initiated at a constant distance from the landing surface irrespective of its slope, indicating that they are able to estimate the distance to the surface without touching it (Evangelista et al. 2009). Hawk moths hover when approaching a dummy flower, but in contrast to honeybees, they usually decelerate in four distinct steps (hover phases) before making contact with the surface (Pfaff and Varjú 1991).
Bumblebees have recently been shown to control flight speed and flight position in much the same way as their close relatives, the honeybees (bumblebees: Baird et al. 2010; Linander et al. 2015; honeybees: Kirchner and Srinivasan 1989; Baird et al. 2005), despite large differences in body size and aerodynamics. Do they also control their landing in similar ways? While the final ‘touchdown’ landing behaviour of honeybees has recently been studied in detail (Evangelista et al. 2009), little is known about how bumblebees orchestrate the final, critical moments of landing on the flowers they choose to pollinate. Moreover, bumblebees are commercially valuable insects all over the world and the decline of several species motivates investigations that help us understand the behavioural biology of these species. Details of their landing behaviour are also of interest for the development of new intelligent lighting systems for greenhouses where bumblebees still must be able to safely land on the flowers to pollinate them.
Here, we filmed free-flying bumblebees (Bombus terrestris) landing on a platform rotated from a horizontal to an upside-down orientation in increments of 30° and analysed their landing trajectories, their body and head orientation, and the orientation of the antennae from the moment of leg extension to first contact with the surface. We also recorded the appendage with which they first made contact with the platform.
Materials and methods
Animals and experimental setup
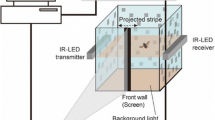
Bumblebee (B. terrestris) hives from a commercial breeder (Koppert, Berkel en Rodenrijs, The Netherlands) were placed in an indoor flight cage (2.3 m long, 2.0 m high and 2.0 m wide) made from aluminium netting. Six hives were used during the course of the experiment. The average temperature in the cage was 23 °C. Illumination was provided by two fluorescent lamps (flicker frequency >20 kHz) mounted in the roof of the cage (BIOLUX®, OSRAM GmbH, Munich, Germany) with a light intensity of 600 lx as measured (Hagner ScreenMaster, B. Hagner, Solna, Sweden) from the surface of the horizontally oriented landing platform. The bees were trained to visit a feeder with sugar solution placed on top of a flat transparent Perspex platform (10 cm × 15 cm, 0.4 cm thick) attached to a tripod on a rotatable arm, approx. 1 m above the floor (Fig. 1). This “training feeder” was removed during the experiments when the bees instead fed from three circles of white filter paper (3 cm diameter) drenched in sugar solution and placed in a row on the platform. To attract the bees to the centre of each feeding circle rather than to the periphery of the platform, a small circle of blue paper (1 cm diameter) was placed in the centre of each circle. Once the bees started to feed from these circular targets, they were marked with plastic number plates on the back of their thorax for identification. A white disc (30 cm diameter) was placed 10 cm behind the centre of the platform to facilitate the detection of the landing bees in the videos.

Experimental setup. The bees were trained to feed from three circles of filter paper placed on a platform attached to a rotatable arm on a tripod. The landings of individual bees were filmed in side view by a high-speed video camera
Experimental procedure
Individual landings along the centreline of the platform were filmed at 400 frames s−1 using a high-speed video camera (MotionBLITZ EoSens® mini1, Mikrotron GmbH, Unterschleissheim, Germany), 15 cm away from the centre of the platform. In each experimental trial, which lasted for approximately 1 h, the slope of the platform was oriented to 0°, 30°, 60°, 90°, 120°, 150°, or 180° as measured from the horizontal plane. All experiments were conducted during the morning hours and shortly after lunch (08:00 h–14:00 h) when the bees were most active. To avoid any circadian influence on the landing behaviour, each experimental trial was randomised throughout the experiment. To avoid possible interference from other bees, only bees that landed on an unoccupied feeder circle were used in the analysis.
Analysis
Body and head orientation and body position at the moment of leg extension
To determine the body orientation and distance to the platform when a bumblebee initiates leg extension, a single frame, recorded 2.5 ms before the extension of the legs, was analysed for 16 individual bees per platform angle. Some of these individuals were used across different platform angles. To be included in the analysis, the bee had to extend its legs in perfect side view of the camera (or nearly so; for examples of frames analysed, see Fig. 2). Four different angles (using Screen Protractor 4.0, Iconico, Inc., New York, USA) were determined for each bee in the frame selected: (A) the angle between the platform surface and the long axis of the body (a line drawn from the base of the antennae through the thorax and to the tip of the abdomen), (B) the angle between the horizontal plane and the long axis of the body, (C) the angle between the vertical plane and a line drawn from the top of the head through the tip of the mouth (head tilt), (D) the angle between the long axis of the body and the head tilt (for schematic illustrations of the angular measurements A–D, see insets in Fig. 3). In addition, one linear measurement (using ImageJ 1.47v, Wayne Rasband, National Institutes of Health, USA) was determined in the same frame: (E) the perpendicular distance between the base of the antennae and the landing surface (for a schematic illustration of this measurement, see inset in Fig. 4).

Side-views of bees at the moment of leg extension at different tilts (0°–180°) of the landing platform. Note that the body orientation (in relation to the horizontal plane) only changes from approx. 30° (0° platform) to 51° (180° platform), while the positioning of the antennae continuously point towards the platform surface

Body orientations at the moment of leg extension when approaching platforms with different slopes: A body orientation relative to the platform, B body orientation relative to the horizontal plane, C head orientation relative to the vertical plane, and D body orientation relative to head orientation. The insets to the right indicate the angular measurements. 16 individuals were analysed for each platform tilt, and values given are mean ± SEM. A linear regression was performed for each data set (A: y = 0.87x − 29.66, R 2 = 0.99, P < 0.001, B: y = 0.12x + 29.32, R 2 = 0.63, P < 0.001, C: y = 0.23x + 6.64, R 2 = 0.84, P < 0.001, D: y = 0.11x + 64.68, R 2 = 0.40, P < 0.001). For comparison, linear regression lines from comparative measurements on honeybees (Evangelista et al. 2009) are included in the figure (dashed lines)

The perpendicular distance between the base of the antennae and the surface of the platform at the moment of leg extension (distance E, shown by the inset). Values are mean ± SEM. 16 individuals were analysed per platform tilt
Antennal orientation just before touchdown
For each landing, the antennal orientation in the frame just before the bee made contact with the surface of the platform was also analysed from three different measurements: (F) the angle between the vertical plane and a line drawn through the flagellum of the antenna, (G) the angle between the landing surface and the flagellum, (H) the angle between the head tilt and the flagellum (for schematic illustrations of the angular measurements F–H, see insets in Fig. 5). To be included in the analysis, the bee had to land in perfect side view of the camera [the images of the left and right legs (rear and middle) overlap], or nearly so. When the two antennae did not overlap, a mean value of their angles was used.

Antennal orientation just before the bee touched the surface of the platform. The angular measurements are illustrated to the right: F the angle between the flagellum and the vertical plane, G the angle between the flagellum and the platform, and H the angle between the head and the flagellum. Values are mean ± SEM. A linear regression was performed for each data set (F: y = 0.56x + 41.55, R 2 = 0.85, P < 0.001, G: y = 0.43x + 48.25, R 2 = 0.77, P < 0.001, H: y = 0.31x + 28.87, R 2 = 0.62, P < 0.001). In each condition, 16 individuals were analysed
Contact with surface at touchdown
For each platform tilt, the relative proportion of the appendage that first made contact with the platform (the hind legs, the middle legs, the front legs, the antennae, or a combination of these) was determined.
The landing trajectory and the hover phase
Finally, the extended trajectory (15 cm below or above the landing surface) of seven individual landings at each platform tilt was manually digitized in a custom made tracking software in Matlab. This allowed us to visualize the flight trajectory and to analyse the variation of the distance of the bee to the platform over time, the variation of flight speed over time, and the duration of the hover phase. In case there was more than one hover phase, the last hover phase before touchdown was examined. Only bees that landed in perfect side view, or nearly so, were included in the analysis.
Statistics
All statistical tests were carried out in SPSS (IBM SPSS Statistics 20). Standard linear regressions were made on data sets that looked linear (data sets A, B, C, D, F, G and H). To test if the duration of the hover phase differed between landings at different platform tilts, a one-way ANOVA was performed (the data sets were tested for normality using normal Q–Q plots and the Shapiro–Wilk test, and for homogeneity of variances using Levene’s test). Significance was set at P < 0.05.
Results
Body and head orientation at the moment of leg extension
In the frame just before leg extension was initiated (−2.5 ms), we defined four different parameters of body orientation for each bee (illustrated by the insets to the right in Fig. 3). As the platform tilt increased from 0° (perfectly horizontal) to 180° (upside down), the angle between the body and the platform (angle A, Fig. 3) increased linearly (from 29.9 ± 1.8° to 128.1 ± 1.2°) At the same time, the angle between the body and the horizontal plane also increased linearly (angle B, Fig. 3) from 30.0 ± 1.7° (0° platform) to 51.3 ± 1.1° (180° platform), but at a lower rate. These results suggest that bumblebees make only small changes in body orientation as the platform angle increases (Fig. 2). To further investigate if bumblebees tilt their heads, rather than their whole body, backwards with increasing platform tilt, we also defined the angle between the head and the vertical plane (angle C, Fig. 3), as well as the angle between the body and the head (angle D, Fig. 3) for each bee. We found that, as platform angle increased, the angle between the head and the vertical plane increased linearly from 6.8 ± 2.0° (0° platform) to 48.4 ± 1.7° (180° platform). This 41.6° change in head tilt between landings at a horizontal platform (tilt = 0°) and upside-down platform (tilt = 180°) is almost twice as large as the 21.3° change in body tilt in the same experimental conditions. In other words, the head was tilted backwards in the dorsal direction to a larger degree than the body. This was confirmed by measurements of the angle between the body and the head that increased linearly from 65.4 ± 1.9° (0° platform) to 83.5 ± 1.7° (180° platform). However, it is important to note that the increase of the head tilt was still relatively small compared to the increase of the platform tilt.
Distance from the platform at the moment of leg extension
The perpendicular distance between the base of the antennae and the platform at the moment of leg extension rapidly changed for low platform tilts; from 16.4 ± 1.6 mm at 0° to 8.7 ± 0.7 mm at 60°, while being kept relatively constant around 8 mm at higher platform angles (90° = 8.4 ± 0.7 mm, 120° = 9.3 ± 1.1 mm, 150° = 7.7 ± 0.8 mm, 180° = 7.4 ± 0.8 mm; Fig. 4).
Antennal orientation just before touchdown
To assess the orientation of the antennae at the moment of touchdown at a surface, we analysed the angle between the flagellum and the vertical plane (angle F, Fig. 5). We found that this angle increased linearly with increasing tilt of the platform, ranging from 44.2 ± 3.7° (0° platform) to 143.1 ± 3.2° (180° platform). This suggests that bumblebees tilt their antennae backwards as the tilt of the landing surface is increased. This is also clearly visible from the photographs in Fig. 2. A closer investigation of the angle between the flagellum and the platform (angle G) and the angle between the head and the flagellum (angle H) reveals that the landing bumblebees do not point their antennae at a constant angle neither to the surface of the platform nor to their head (Fig. 5). A comparison with the corresponding angle of the head (angle C, Fig. 3) shows that in each condition the bees tilt their antennae backwards more than they tilt their head.
Contact with the surface at touchdown
We also recorded the appendage with which the bumblebees first touched the surface of the platform. At 0° tilt, 75 % of the bumblebees first contacted the surface with their hind legs/or a combination of hind legs and middle legs (Fig. 6). At 30° tilt, the first contact was still made by a leg; most commonly the middle legs or the front legs. At 60°–120° platform tilts, most of the bumblebees touched the platform with the antennae first and at 150° and 180° platform tilts, all bumblebees contacted the platform with their antennae first.

Proportions of landings where a given appendage was the first to touch the platform at different tilts of the landing surface. In each condition, 16 individuals were analysed. H/HM hind legs, or hind legs and middle legs together, M middle legs, MF middle legs and front legs, F front legs, FA front legs and antennae, A antennae. The honeybee data are adapted from Evangelista et al. (2009)
The landing trajectory and the hover phase
All of the tested bumblebees appeared to have at least one relatively stable ‘hover phase’ during which they remained at a constant distance from the platform for a short while. The mean duration of the hover phase for different platform tilts was found to lie between 54 and 86 ms (Table 1) and did not differ significantly between platform tilts (One-way ANOVA, F = 1.69, P = 0.15). During the hover phase, the flight speed of the bees was mostly close to zero (Table 1; Fig. 7b–g), indicating that the bees remained in the same place in the air. At 0° platform tilt, some of the bees kept a constant distance to the platform while still moving along the platform with reduced speed (Fig. 7a). The extension of the legs usually occurred in close connection to the hover phase (blue cross in Fig. 7), after which the bees briefly increased flight speed again until they contacted the surface. The legs of the bees were sometimes extended just after the hover phase (Fig. 7 a, e, f), and sometimes just before the hover phase (Fig. 7 b, c, d, g).

Examples of flight trajectories of a landing bumblebee at different platform tilts. Filled circles represent the perpendicular distance between the base of the antennae and the surface of the platform (left y-axis). Hollow circles indicate flight speed (right y-axis). The hover phase is shaded grey and the timing of leg extension is indicated with a cross. The last point in each graph indicates when the bee made contact with the platform
Discussion
Body and head orientation at the moment of leg extension
In this study, we found that landing bumblebees tilted their body backwards as platform angle was increased (angle B, Fig. 3). However, this change in body orientation (approx. 21°) was small relative to the change in platform angle (180°), suggesting that bumblebees have a fairly constant body orientation at the moment of leg extension, irrespective of the slope of the landing surface. This indicates that bumblebees have to maintain a relatively constant body orientation to be able to stay aloft. Similarly, honeybees do not change their body orientation much when they fly through tunnels of different orientation (Dacke and Srinivasan 2007). Not surprisingly, we also found that the bumblebees tilted their head backwards as platform angle increased, and did so more than the body (approx. 42° compared to 21°; angle C, Fig. 3). Nonetheless, the change in head tilt was relatively small compared to the change in platform tilt.
Honeybees also tilt the body and head slightly backwards as the slope of the landing surface increases (Evangelista et al. 2009), but, just like bumblebees, the relative changes in body orientation (approx. 29°; angle B, dashed line, Fig. 3) and head orientation (50°; angle C, dashed line, Fig. 3) are small compared to the change in platform tilt (180°). Nevertheless, the actual values of the angles are not exactly the same for bumblebees and honeybees (Fig. 3). Bumblebees always seem to land in a more upright position compared to honeybees (angle B, Fig. 3), but this could simply be because they generally fly in a different position. Indeed, bumblebees have a body angle of approx. 25° when flying at ~70 cm/s (Julien Lecoeur, pers. comm.), whereas honeybees flying at ~40 cm/s have a more horizontal body orientation of 20° (Dacke and Srinivasan 2007). Furthermore, the angle between the head and the vertical plane is smaller in bumblebees compared to honeybees (angle C, Fig. 3), indicating that the head is pointing more downwards in bumblebees at the moment of leg extension. These differences are probably due to body shape, size and aerodynamic differences between the two species.
Distance from the platform at the moment of leg extension
The perpendicular distance between the base of the antennae and the landing surface at the moment of leg extension is different in bumblebees and honeybees. The bumblebees extended their legs closer to the platform (at about 8 mm for tilts of 60°–180°; Fig. 4) compared to honeybees [that extend their legs at a constant distance from the platform of approx. 16 mm, irrespective of the slope of the landing surface (Evangelista et al. 2009)]. At 0° and 30°, the bumblebees extended their legs earlier (0°: 16 mm, 30°: 13 mm), but this seems to be an exception. The fact that bumblebees, as well as honeybees, extend their legs at a constant distance from the landing surface irrespective of the slope (with the exception of 0° and 30° tilts for bumblebees) suggests that they are somehow able to estimate the distance to the surface without touching it. How is this possible? The rainforest bee Megalopta genalis relies on expanding optic flow cues generated by the landing surface to initiate leg extension during landing (Baird et al. 2015). It is possible that bumblebees and honeybees also use this type of optic flow cues to initiate their leg extension, but more detailed experiments are required to investigate this.
Why did the bumblebees extend their legs earlier when landing on 0° and 30° tilts? In these two conditions, the bumblebees often extended all legs more or less simultaneously, as if landing on these orientations proved more difficult. In fact, typical bumblebee flowers, such as dead nettle, foxglove and clover (Willmer 2011), rarely have a flat surface facing upwards, suggesting that bumblebees might be less adapted to land on horizontal surfaces. Even if bumblebees would approach flowers with a horizontal surface, many of these flowers have vertical structures (such as stamens) that the bumblebees might be targeting with their antennae. Furthermore, before landing on flowers, bumblebees usually touch the flowers with the tips of their antennae (Pohl and Lunau 2007). At 0° and 30° tilts, the bumblebees contacted the surface first with their legs and not with the antennae (Fig. 6). The antennae were not the first to touch the surface until the platform was oriented at 60°, suggesting that the antennae are important for estimation of the distance to the surface.
The bumblebees often approached the platform from below, at all platform tilts (including 0° and 30°). This observation corresponds well to earlier studies (Pohl et al. 2008; Orth and Waddington 1997). Bumblebees tend to visit flowers with vertical inflorescences (such as foxglove and willow herb) and to approach them by gradually flying upwards, i.e. the first visit is usually to the bottom most flowers (Orth and Waddington 1997). These flowers either open from the bottom (fox glove), or have hanging stamens (willow herb), which enable the bees to approach the flowers in an “upright” position. Moreover, when bumblebees approach a vertical artificial flower, they fly towards the lower part of the flower and then make contact with it with the antennae while flying upwards (Pohl et al. 2008). Taken together, bumblebees seem well adapted to land from below, which could also be observed in the well-controlled landings on inclined and inverted surfaces in this study.
Antennal orientation just before touchdown
The elevation of the antennae steadily increased from approx. 45°, when approaching a 0° platform, to 145°, when landing on an inverted platform of 180° (angle F, Fig. 5). In honeybees, the elevation of the antennae can instead be divided into three categories: When landing on horizontal or nearly horizontal surfaces (0°–40°), the antennae are successively elevated from a minimum of about 40° When the slope is further increased (50°–80°), the antennae have a fairly constant orientation of about 65° At higher inclinations (90°–180°), the antennae are again elevated to a maximum value of about 130° (Evangelista et al. 2009). Bumblebees might also hold their antennae at a constant orientation at platform tilts around 60°, but since fewer platform tilts were investigated in the present study, we cannot make further conclusions about this.
It is interesting to note that the angle between the head and the antennae in bumblebees, as well as honeybees (Evangelista et al. 2009), changed with increasing platform tilt. This means that the antennae do not simply follow the head, but are instead actively adjusted during landing. Overall, it appears as though the bees are pointing the antennae towards the landing surface (Fig. 2). By doing so, they could potentially estimate the distance to the platform, similar to a person who stretches their hands out in front of them in the dark to assess the distance to an object. Already at a surface tilt of 60°, the antennae are the first appendages to touch the platform (Fig. 6). The tip segments of each antenna are covered with tactile hairs, which have mechanoreceptors that are used during inspection of objects (Scheiner et al. 2005). The mechanosensory information that they provide thus seems to play an important role in the touchdown process of a landing bee, especially when the surface is inverted. In fact, honeybees that have had their antennae removed rarely land when the surface surpasses 135° (Evangelista et al. 2009). The bumblebees may also point the antennae towards the surface to direct their attention to it. Crickets point their antennae towards black discs that are moved in the horizontal plane, indicating that the antennae are used to track visual targets (Honegger 1981). Moreover, bumblebees and honeybees specifically point their antennae at the floral guides (small areas in the centre of a flower that indicates where the reward is located) of artificial flowers before they land (Lunau et al. 2009). This is the first physical contact with the flower, most likely helping them to evaluate if the flower is rewarding or not (by coming into contact with chemicals on the surface). In addition to tactile hairs, the antennal tips also have a few taste hairs, indicating that the antennal tips also play a role in gustation (Scheiner et al. 2005).
Contact with the surface at touchdown
The first appendage of the bumblebee to make contact with the surface varied with the tilt of the platform (Fig. 6). This is to be expected, since the body orientation of the bumblebees was fairly constant throughout the different conditions. Interestingly, when the platform was tilted by 30°, all the legs and the antennae contacted the surface more or less simultaneously. This same phenomenon occurred at a platform angle of 60° in honeybees (Evangelista et al. 2009; Fig. 6). Most likely, this is due to differences in body and leg shape between the two species.
The landing trajectory and the hover phase
The bumblebees were observed to gradually reduce speed and lower themselves towards the surface of the platform in preparation for landing (Fig. 7). While doing so, they often had one or more hover phases in which the bees maintained a constant distance from the platform. The average hover phase flight speed at platforms tilted by 60°–180° was 5.0 cm/s (Table 1), while the average speed was somewhat higher at horizontal (0°: 15.3 cm/s) or close to horizontal (30°: 7.1 cm/s) surfaces. This suggests that the bumblebees were not remaining in the same place in the air, but rather flew along the platform at a constant distance from the surface in these conditions. Just like bumblebees, honeybees also slow down and drift at low speed towards a surface in preparation for landing, but hover at a more constant position in the air (at speeds close to zero) for all platform tilts (Evangelista et al. 2009). The actual duration of the hover phase at different platform tilts also differed between bumblebees and honeybees. At low platform angles, bumblebees and honeybees had hover phases of similar duration (bumblebees 30°: 68 ms, honeybees 40°: 54 ms). However, at higher platform angles, bumblebees had shorter hover phases (90°: 86 ms, 150°: 54 ms) than honeybees (90°: 119 ms, 150°: 144 ms). This comparison suggests that bumblebees are more adapted to land on vertical and inverted surfaces than honeybees.
Concluding remarks
We have shown that bumblebees have a relatively constant body and head orientation at the moment of leg extension, regardless of the tilt of the platform. They tend to extend their legs at a constant distance of about 8 mm from the platform surface, at least for platform tilts between 60° and 180° relative to the horizontal plane. The orientation of the antennae, though continuously pointed towards the surface, varies between platform orientations. Likewise, the first appendage that contacts the surface varies for different platform tilts. We also found that the duration of the hover phase stayed more or less the same throughout the different conditions. In comparison to their close relatives, the honeybees, the final moments of landing are similar. However, the bumblebees extended their legs closer to the platform, and the duration of the hover phase was different in the two species, suggesting that they are adapted to land on differently oriented surfaces.
References
Abrol DP (2011) Pollination biology: biodiversity conservation and agricultural production. Springer Science and Business Media, Dordrecht
Baird E, Srinivasan MV, Zhang S, Cowling A (2005) Visual control of flight speed in honeybees. J Exp Biol 208:3895–3905. doi:10.1242/jeb.01818
Baird E, Kornfeldt T, Dacke M (2010) Minimum viewing angle for visually guided ground speed control in bumblebees. J Exp Biol 213:1625–1632. doi:10.1242/jeb.038802
Baird E, Boeddeker N, Ibbotson MR, Srinivasan MV (2013) A universal strategy for visually guided landing. Proc Natl Acad Sci USA 110:18686–18691. doi:10.1073/pnas.1314311110
Baird E, Fernandez DC, Wcislo WT, Warrant EJ (2015) Flight control and landing precision in the nocturnal bee Megalopta is robust to large changes in light intensity. Front Physiol 6:305. doi:10.3389/fphys.2015.00305
Borst A (1986) Time course of the houseflies’ landing response. Biol Cybern 54:379–383
Breugel F, Dickinson MH (2012) The visual control of landing and obstacle avoidance in the fruit fly Drosophila melanogaster. J Exp Biol 215:1783–1798. doi:10.1242/jeb.066498
Dacke M, Srinivasan MV (2007) Honeybee navigation: distance estimation in the third dimension. J Exp Biol 210:845–853. doi:10.1242/jeb.002089
Evangelista C, Kraft P, Dacke M, Reinhard J, Srinivasan MV (2009) The moment before touchdown: landing manoeuvres of the honeybee Apis mellifera. J Exp Biol 213:262–270. doi:10.1242/jeb.037465
Goodman LJ (1960) The landing responses of insects, I. The landing response of the fly, Lucilia sericata, and other Calliphorinae. J Exp Biol 37:854–878
Goulson D, Chapman JW, Hughes WOH (2001) Discrimination of unrewarding flowers by bees; direct detection of rewards and use of repellent scent marks. J Insect Behav 14:669–678
Honegger HW (1981) A preliminary note on a new optomotor response in crickets: antennal tracking of moving targets. J Comp Physiol 142:419–421
Kirchner WH, Srinivasan MV (1989) Freely flying honeybees use image motion to estimate object distance. Naturwissenschaften 76:281–282
Linander N, Dacke M, Baird E (2015) Bumblebees measure optic flow for position and speed control flexibly within the frontal visual field. J Exp Biol 218:1051–1059. doi:10.1242/jeb.107409
Lunau K, Unseld K, Wolter F (2009) Visual detection of diminutive floral guides in the bumblebee Bombus terrestris and in the honeybee Apis mellifera. J Comp Physiol A 195:1121–1130. doi:10.1007/s00359-009-0484-x
Orth AI, Waddington KD (1997) The movement patterns of carpenter bees Xylocopa micans and bumblebees Bombus pennsylvanicus on Pontederia cordata inflorescenses. J Insect Behav 10:79–86
Pfaff M, Varjú D (1991) Mechanisms of visual distance perception in the hawk moth Macroglossum stellatarum. Zool Jb Physiol 95:315–321
Pohl M, Lunau K (2007) Modification of the innate antennal reaction at floral guides in experienced bumblebees, Bombus terrestris (Hymenoptera: Apidae). Entomol Gener 29(2/4):111–123
Pohl M, Watolla T, Lunau K (2008) Anther-mimicking floral guides exploit a conflict between innate preference and learning in bumblebees (Bombus terrestris). Behav Ecol Sociobiol 63:295–302. doi:10.1007/s00265-008-0661-x
Scheiner R, Schnitt S, Erber J (2005) The functions of antennal mechanoreceptors and antennal joints in tactile discrimination of the honeybee (Apis mellifera L.). J Comp Physiol A 191:857–864. doi:10.1007/s00359-005-0009-1
Srinivasan MV, Zhang SW, Chahl JS, Barth E, Venkatesh S (2000) How honeybees make grazing landings on flat surfaces. Biol Cybern 83:171–183
Tammero LF, Dickinson MH (2002) Collision-avoidance and landing responses are mediated by separate pathways in the fruit fly, Drosophila melanogaster. J Exp Biol 205:2785–2798
Wagner H (1982) Flow-field variables trigger landing in flies. Nature 297:147–148
Willmer P (2011) Pollination and floral ecology. Princeton University Press, Princeton
Acknowledgments
We would like to thank Lana Khaldy for assistance with data analysis. This work was supported by the Swedish Research Council Formas [229-2010-829] the Swedish Foundation for Strategic Research [FFL09-0056] and the Swedish Research Council [2011-4701].
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Rights and permissions
About this article

Cite this article
Reber, T., Baird, E. & Dacke, M. The final moments of landing in bumblebees, Bombus terrestris . J Comp Physiol A 202, 277–285 (2016). https://doi.org/10.1007/s00359-016-1073-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00359-016-1073-4