
Abstract
In this work, the phase-resolved internal flow of a bi-stable fluidic oscillator was measured using phase-locked three-dimensional three-components magnetic resonance velocimetry (3D3C-MRV), also termed as 4D-MRV. A bi-stable fluidic oscillator converts a continuous inlet-mass flow into a jet alternating between two outlet channels and, as a consequence provides an unsteady, periodic flow. This actuator can therefore be used as flow-control actuator. Since data acquisition in a 3D volume takes up to several minutes, only a small portion of the data is acquired in each flow cycle for every time point of the flow cycle. The acquisition of the entire data set is segmented over many cycles of the periodic flow. This procedure allows to measure phase-averaged 3D3C velocity fields with a certain temporal resolution. However, the procedure requires triggering to the periodic nature of the flow. Triggering the MR scanner precisely on each flow cycle is one of the key issues discussed in this manuscript. The 4D-MRV data are compared to data measured using phase-locked laser Doppler anemometry and good agreement between the results is found. The validated 4D-MRV data is analyzed and the fluid-mechanic features and processes inside the fluidic oscillator are investigated and described, providing a detailed description of the internal jet-switching mechanism.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Fluidic oscillators are devices capable of generating a pulsating flow, i.e., a jet alternating between two exits, while being fed with steady fluid into one inlet. Many terms for this type of device are used in the literature: the most common ones are “oscillatory blowing actuator,” “sweeping jets,” “flip flop jet nozzle” or “fluidic diverter” (Arwatz et al. 2008; Gokoglu et al. 2009; Seele et al. 2009; Viets 1975). One of the most valuable features of fluidic oscillators is that they do not consist of moving parts. They do not require any additional control input to oscillate, and their oscillation frequency and, thus, the exit velocities can be controlled by adjusting the flow rate (Arwatz et al. 2008). Fluidic oscillators attained much interest in many branches of fluid mechanics and beyond. Mainly because in the field of active flow control for instance, a pulsating flow can be much more effective and efficient than a continuous one. Seifert et al. (1993) report that oscillations introduced into a shear flow on the verge of separation can excite large-scale unstable structures above the surface, which can help the flow to withstand an adverse pressure gradient without separating. In Seifert et al. (2009), a method is described, which decreases the size of the re-circulation zone behind a truck trailer and increases the static pressure on its rear-facing surface, using an array of oscillating actuators housed in an add-on device. A drag reduction of up to 20 % was reported. A lift-to-drag ratio enhancement of approximately 60 %, caused by an array of fluidic oscillators installed on the suction side of a semispan wing/nacelle combination of a Bell-Boeing V-22, was achieved by Seele et al. (2009). Other applications of fluidic oscillators are discussed in Raman et al. (2005) for jet thrust vectoring or by Guyot et al. (2009) for an active combustion control in bluff-body burners.
The basic feature of fluidic oscillators as discussed in this work is the Coanda effect. Coanda (1936) describes an experimental setup, which shows a fluidic jet attaching to a deflected flap installed in the vicinity of the jet exit. The jet entrains nearby stagnant fluid, generating a low-pressure region around the jet. The flap, situated in this low-pressure region, causes the jet to bend toward the flap surface and to attach to it. Figure 1a describes a generic fluidic-oscillator model, first investigated by Spyropoulos (1964). The main components are the main inlet-flow passage, the two control ports, the two Coanda walls, the splitter and the two outlets. The area upstream of the splitter and between the two Coanda walls are also termed as interaction cavity (Tesar and Bandalusena 2010).

Basic oscillator model after Spyropoulos (1964). a Oscillator without connected control ports. Jet attached to Coanda wall A. b Oscillator with connected feedback tube between the control ports. Characteristic parameters are the feedback-tube length l, the feedback-tube diameter d and the flow rate \(\dot{V}\). Note that the feedback-tube length l stands for the entire length of the feedback tube
A first parameter study of a generic bi-stable fluidic oscillator in subsonic flow conditions was conducted by Viets (1975). Viets described that the frequency of the jet oscillation increases with increasing flow rate and decreases with increasing feedback-tube length. Raman et al. (1994) added the feedback-tube diameter as characteristic parameter, which increases the oscillation frequency with increasing diameter.
Viets (1975) describes the internal mechanism of the switching process as follows: The fluid enters the oscillator from the left. Based on the Coanda effect, the jet attaches to one of the two walls, marked A in this example. As a consequence, a low-pressure region develops in control port A, caused by the jet turning. This steady state of the fluidic oscillator is stable. If the control ports A and B are connected to each other by a feedback tube, as sketched in Fig. 1b, the low-pressure region at port A draws fluid through that tube from control port B. This leads to a pressure gradient, pulling the jet to control port B and consequently, the jet attaches to Coanda wall B. As a result of the side change of the jet to wall B, a low-pressure region develops at control port B, creating an opposite pressure gradient between control ports A and B, causing the jet to switch back to Coanda wall A. A full cycle is completed and the whole process restarts. This behavior and the fact that each state is marginally stable without feedback tube justifies the term bi-stable.
Tesar et al. (2006) investigated the reverse flow effect of bi-stable fluidic oscillators. While the fluid is exiting through outlet A, a substantial amount of fluid is drawn upstream through outlet B and is added to the exiting flow of outlet A. This upstream flow is caused by jet entrainment at the splitter and results in an increased flow rate in outlet A as compared to the inlet-mass flow rate. Amplifications of up to 117 % of the inlet-flow rate were reported for the steady-state case. No amplification values for the oscillating state were given. In several flow-control applications (Arwatz et al. 2008; Seifert et al. 1993, 2009) exit nozzles were added. The nozzles change the pressure levels inside the actuator and therefore allow to adjust the magnitude of the reverse flow effect.
Detailed investigations of the flow inside the oscillator require a considerable effort due to the complex geometry and the flows unsteady nature. Tesar and Bandalusena (2010) conducted PIV measurements inside a fluidic oscillator without feedback tube and thus in a stable and steady state with the jet attached to one Coanda wall (A). They detected a vortex occupying most of the interaction cavity and a smaller vortex blocking the entrance of outlet B.
Koso et al. (2002) investigated the jet-switching mechanism using hot-wire anemometry in the feedback tube and with pressure sensors installed at the control ports. They found that the velocity maximum inside the feedback tube was reached, when the pressure difference between the two control ports is zero. They proposed that the jet detachment process from one Coanda wall is much lower than the attachment process of the jet to the other wall. This is in agreement with the findings of Nishri and Wygnanski (1998) and Darabi and Wygnanski (2004) about the hysteresis between separation and reattachment.
Further studies visualizing the internal flow of fluidic oscillators of different geometry and features were, e.g., conducted by Yang et al. (2007) and Gregory et al. (2005).
Yet, there are no comprehensive investigations visualizing the flow-field inside and downstream of the actuator. Until now, the flow physics of fluidic oscillators, as for instance the internal jet-switching mechanism, have not been fully understood (Cattafesta and Sheplak 2011). The way the jet detaches from one Coanda wall and how the re-circulation zone develops right after the jet attached to a Coanda wall is not described in the literature. The dynamic effects of the oscillation in comparison with the steady-state and quasi-steady-state models are not clear to date.
The primary measurement technique used in this investigation is the 4D magnetic resonance velocimetry (4D-MRV), which was originally developed for the diagnostic of the human cardiovascular system (Markl et al. 2003). On the basis of modern phase-contrast imaging (PCI) procedures, which acquire three-dimensional three-component (3D3C) velocity data for stationary flows (Haacke et al. 1999), the 4D method is able to capture phase-resolved, 3D phase-contrast images. For this purpose, the traditional 3D data-acquisition scheme is extended by a fourth dimension, the time. The main requirement is that the investigated flow may be unsteady but has to be periodic. The acquisition of a full 3D3C velocity field at a certain phase angle of the periodic flow is segmented over several flow cycles. Each flow cycle is segmented into short equidistant time steps, enabling the MR scanner to acquire the 3D3C velocity data for different phase angles of the flow cycle. A phase-averaged data set of the periodic flow is created. The result is a four-dimensional velocity matrix with three spatial and one temporal (or phase in the current application) dimension.
The procedure requires triggering to the periodic nature of the flow. In case of the cardiovascular imaging, an electrocardiogram (ECG) marks the beginning of a new flow cycle, which in turn triggers the scanner. Canstein et al. (2008), for example, use this method to compare the flow in the thoracic aorta of a human volunteer and a replica manufactured using rapid prototyping. The flow through the replica is supplied by providing a pulsatile flow. The 4D-MRV measurement was triggered on the periodic operation of the pump.
In mechanical engineering sciences, a 4D-MRV method was applied by Elkins et al. (2003), who investigated a model of an internal gas turbine blade cooling channel. This flow was unsteady due to strong turbulence but not periodic and consequently, no system for an in situ flow triggering was required or implemented. A comprehensive review of (non-time-resolved) MRV for engineering applications can be found in Elkins and Alley (2007).
2 Experimental setup
2.1 Flow apparatus
A flow supply system similar to the one described in Grundmann et al. (2012) was used. Deionized water with a Gadolinium-based contrast agent, with a concentration of 1 mmol/l, was used as medium. An important modification of the previous system is the added immersion heater with a thermostat, that controls the temperature of the water. This allows to adjust the Reynolds number also by modifying the viscosity as well as by the flow rate and helps preventing Reynolds number drifts due to temperature drifts. Additionally, the heated water allows to reach higher Reynolds numbers than with cool water. Temperature, pressure and flow rate are monitored. A Labview program with an implemented PID controller controls the Reynolds number at fixed temperatures and flow rates.
2.2 Fluidic oscillator
The design of the fluidic oscillator was taken from Arwatz et al. (2008). This fluidic actuator has the same working principle as described above and as depicted in Fig. 1. The actuator was scaled in order to suit the experimental limitations.
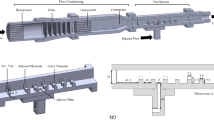
Figure 2 shows a cross-sectional view of the CAD model of the assembled oscillator setup as used in the experiments. The supply tube, with an inner diameter of 25.4 mm, is connected to the inlet port of a flow straightener. The cross section is transformed from circular to square, resulting in an inlet cross-sectional area of 21 × 21 mm2. A converging nozzle accelerates the fluid toward the throat, with a minimum cross-sectional area of 7.85 × 21 mm2 (y × z). The flow is transformed into a jet of rectangular cross section with an almost uniform velocity profile and enters the interaction cavity further downstream. As sketched in Fig. 1, two adjacent control ports are connected to both sides of the interaction cavity. A connector for the integration of a pressure transducer is implemented into one of the control ports. All necessary modifications were made symmetrically in both control ports to avoid an asymmetry of the feedback tube and an influence on the oscillation process. All components on the side of the pressure sensor are subscribed with an index A and on the other side with an index B. Downstream of the oscillators outlets, the fluid enters a plenum with the dimensions 200 × 80 × 38 mm3 (x × y × z). Further downstream, a nozzle reduces the rectangular cross section of the plenum to the circular shape of the tube leading back to the water tank.

Cross-sectional view of the CAD model of the oscillator, assembled with upstream flow straightener and downstream plenum and outlet nozzle
The flow straightener, actuator and outlet nozzle are made of polyamide using selective laser sintering. The plenum was manufactured of PMMA. All parts were joined using PVC bolts and sealed with o-rings.
2.3 In-situ pressure signal and triggering procedure
For 4D-MRV measurements, it is necessary to trigger the MRI scanner precisely on the periodic flow. The scanner can handle an electrocardiogram signal or a TTL signal. In this work, unsteady pressure measurements seemed most appropriate for this purpose. Several types of pressure transducers and installation positions were considered and tested. Due to the strong magnetic field of 3 Tesla and issues with electromagnetic compatibility inside the MR scanner, not all measuring principles are worth considering. Another requirement is avoiding the metal to not impair the quality of the MR signal. Considering these difficulties, a pressure sensor based on a piezoelectric foil was chosen. The basis is a transparent film made of high-polarized polyvenylidenfluorid (PVDF) in which an electric charge accumulates in response to externally applied forces. With metallic coatings on the lower and upper side of a few hundred Angstrom thickness, the electric potential can be measured (Nitsche et al. 1989). The sensor is only able to measure dynamic effects and with its integrated filter, and amplifier provides a signal in the range from −5 to 5 V. As mentioned before, the PVDF pressure transducer was mounted directly at control port A. Figure 2 shows the pressure port location.
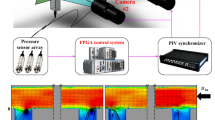
The signal of this sensor is affected by the scanner and requires low-pass filtering. The schematic in Fig. 3 shows all components of the triggering process. The pressure signal is low-pass filtered (LP-filter) with a Kemo Benchmaster 8.07 8-pole Bessel dual channel filter/amplifyer. The cutoff frequency was 40 Hz for measurement M1, 4 Hz for measurements M3, M4, M7 and M8, 2 Hz for measurements M2 and M6 and 1 Hz for measurement M5. The slope was 48 dB/octave for all cases. For a cutoff frequency of 4 Hz, the filter-induced time lag is 100 ms. The time lag was determined for each filter setting and was taken into account for further data processing.

Schematic of the triggering process and components
The filtered pressure signal is sampled by a National Instruments Real-Time PXI-1031 DC system, equipped with a NI PXI-8106 embedded controller card and a NI PXI-6259 multifunctional DAQ card, running under the LabVIEW Real-time operating system. The signal is sampled at 100 Hz and a 5 V pulse (TTL) of 15 ms duration is generated when the pressure signal crosses the zero Volt threshold on a negative slope. The trigger signal is fed into the MRI scanner through a RCA jack.
2.4 4D-MRV procedure
Phase-Contrast Imaging is a common method for medical examinations of blood flows. Three-dimensional and three-component velocity vectors are the result (3D3C-MRV). The 4D-MRV procedure is an advanced 3D3C-method, which subdivides the acquisition of a full 3D3C velocity map into small segments distributed over several flow cycles. Each portion of the data is acquired at the same time point of the underlying periodic flow cycle. After numerous cycles, a phase-averaged velocity map for the considered phase angle is complete. Modern 4D-MRV sequences allow the acquisition of phase-averaged velocity data with a minimum temporal resolution of 2–4 ms. The highest temporal resolution T Res is the time between two successive radio frequency (RF) pulses, also termed repetition time TR, which is at the order of about 5 ms. According to the needs of each experiment, the frequency of the periodic phenomenon and the required number of velocity fields per cycle can be chosen.
Prior to a 4D-MRV scan, a fixed scan-cycle duration SD according to the periodic flow has to be chosen. This duration is then subdivided into a number of equal phase steps PS representing the phase slots of the phase-averaging process, yielding a temporal resolution of T Res. Once triggered, a single scan of this predetermined duration SD starts. In each scan, different parts of k-space are acquired and afterward composed to PS phase-averaged velocity fields. In the case that the duration of the flow cycles varies, there may be some flow cycles that are not fully covered by the scan-cycle duration SD, which leads to unprecise temporal positioning of the phase slots in the flow cycle. This results in noisy data and affects only the last phase slots. Other flow cycles may be too short for the scan-cycle duration. This also results in unprecise positioning of the phase slots in the flow cycle. Flow cycles too short for one entire scan cause the following trigger signal to arrive before the current scan is completed. This leads to an interruption of the scanning procedure until the next trigger signal arrives. This interruption elongates the overall scanning time. All described situations are depicted in Fig. 4. Knowing the average cycle duration precisely is important to correctly associate the MRV data, scanned on a fixed time basis, to the phase angles of the periodic flow.

Subdivision of the trigger signal into 16 equidistant phase steps (blue pressure signal, red TTL trigger impulse, green scanning). The first flow cycle is slightly longer than the scanning duration, the second is a bit shorter. The third scan starts after a short break
A Siemens MAGNETOM Trio Tim System with a 3 Tesla strong main magnetic field was used. The signal was received with a standard 12-channel thorax coil. The maximum resolvable velocity is given by the velocity encoding value VENC that is chosen individually for each experiment. The VENC was chosen according to the maximum velocities occurring in the corresponding experiments to avoid aliasing errors in the phase difference images.
For each complete experiment, two separate measurements are conducted: first a flow-on scan with the 4D-MRV procedure is performed. Afterward a flow-off scan is conducted with the identical procedure. Background phase shifts due to eddy currents and system imperfections are compensated by subtracting the flow-off data of the flow-on data.
In order to reduce the acquisition time, a k-t GRAPPA-sequence (Generalized Autocalibrated Partially Parallel Acquisition Huang et al. 2005) was used for some of the measurements. In the k-t GRAPPA-sequence, a number of phase-encoding steps are bypassed and the missing k-t space data is interpolated based on different sensitivities of the different receiver coils. This procedure reduces the total acquisition time TAT for one full three-dimensional 4D-MRV measurement by about two-thirds. The data acceleration slightly decreases the MR signal magnitude SNRmag, whose effect on the velocity error is discussed below.
Another option to immensely reduce the TAT is to scan only a two-dimensional slice of finite thickness. This is certainly valuable for two-dimensional flows. The benefit of a significantly reduced TAT can then be used for increasing the number of phase steps (PS) to increase the temporal resolution. Two-dimensional scans inherently have a decreased SNR as compared to 3D scans. However, by averaging multiple scans the SNR can be improved with \(\sqrt{n}\), where n is the number of conducted scans. The shorter acquisition time of the 2D scans allows for a higher number of scans for the purpose of averaging.
2.5 Measurement configurations
In preliminary experiments, the oscillation frequencies of the fluidic oscillator were determined from unsteady pressure measurements for three different feed-back tubes as a function of the Reynolds number. The Reynolds number Re = u bulk D h /ν is built with the bulk velocity u bulk in the smallest cross section of the actuators’ throat and the hydraulic diameter at this position and the fluids kinematic viscosity ν. The feed-back tubes had different lengths l and different inner diameters d. Due to the constant water temperature, the Reynolds number is a function of the flow rate only. Figure 5 shows the oscillation frequencies for each feedback-tube configuration.

Characteristic diagram for the three feedback-tube configurations and different Reynolds numbers. Data points mark the dominant frequency of the different oscillator configurations (Reynolds number and feedback geometry). Each circle marks an oscillator configuration, measured with MRV. The light gray lines show the configurations, which are similar in oscillation frequency or in Reynolds number
The black hollow circles in Fig. 5 mark five different combinations of feedback-tube geometry and Reynolds numbers measured using the 4D-MRV technique. These cases were chosen for reasons of comparability: cases 1 and 2 have the same Reynolds number but different frequencies due to a different feedback-tube geometry. Cases 2 and 4 have similar frequencies at different Reynolds numbers and feedback-tube geometry as well as cases 3 and 6.
Table 1 lists the parameters of all conducted measurements. No. stands for the serial number of a measurement configuration. In the following, all results are referred to this table by the serial number M1 to M8. l/d defines the feedback-tube geometry. The flow conditions are defined by the flow rate \(\dot{V},\) the Reynolds number Re and the water temperature T. The MR settings are the velocity encoding value VENC, the spatial resolution for 3D and 2D measurements, the total acquisition time TAT of a single flow-on or flow-off scan (the value in brackets gives the number of such scans that were averaged), the temporal resolution T res, the phase steps per cycle PS, the scan-cycle duration SD and the standard deviation of a single velocity vector σ vel.
2.6 Measurement uncertainty
The velocity error is estimated according to the calculations of the phase noise from Haacke et al. (1999). It depends on the noise of the MR signal magnitude SNRmag as well as on the chosen velocity sensitivity VENC. For its calculation, one region inside and one outside the plenum were chosen. Equation 1 calculates the standard deviation σ vel for a single velocity vector.
Table 1 presents the standard deviation for all measurements. Measurement M4 has the highest standard deviation σ vel = 0.31 m/s, due to the highest VENC of 9 m/s. This results in a relative velocity error of 3.53 %, referred to the VENC.
Another source for uncertainty emerges from varying cycle lengths. The variation of the cycle duration was determined using a static pressure sensor installed at control port A. Flow conditions were reproduced for measurements M2, M3, M4 and M5/M7/M8. The pressure signal for each measurement configuration was sampled for about 1,000 cycles at a sample rate of 200 Hz. Table 2 shows the mean cycle duration and the corresponding standard deviation. Figure 6 shows the histogram for the cycle duration of measurement configuration M2. A probability density function (PDF) with normal distribution is fitted to the data and plotted as a red curve into the diagram. The standard deviations given in Table 2 were determined from this data.

Histogram plot of the cycle duration variation, calculated from the pressure signal at control port A for configuration M2. The red curve is the probability density function fitted to the given data
At positions and phase angles of the cycle where and when strong accelerations take place, the uncertainty of the measured phase-averaged velocity data may be significantly affected by averaging differently long flow cycles, simply due to higher standard deviation of the sampled data. If such accelerations occur late in the cycle, uncertainties above 15 % can be the result. Since this effect appears depending on position and time, no meaningful number can be given for the entire measurement.
2.7 LDA validation experiments
For validating the MRV data, laser Doppler anemometry (LDA) measurements have been conducted. A Dantec Dynamics Flow Explorer system with a Dantec Dynamics BSA F60 processor was used for acquiring the LDA data. An integrated synchronization option allows to trigger the LDA system on the TTL-pulse of the triggering system and to obtain phase-averaged velocity data. The integrated phase-averaging process of the LDA software is different to the 4D-MRV procedure. After velocity data is recorded during one whole flow cycle, the duration of this certain cycle is normalized and the arrival times of the data points are related to their corresponding phase angles. Afterward, all data points with equal phase angle are averaged. Titanium dioxide was used as seeding. The LDA measurements were taken inside the plenum that was built of PMMA for this purpose. The data was taken along a line of 12 points with 5mm spacing. The line is 18 mm downstream of the outlets of the oscillator and at half the channel height in z-direction, as shown in Fig. 7. For each point along the chosen line, 8 flow cycles were measured and averaged.

Measurement positions of the LDA along the y-axis. The resolution in y-direction is 5 m. The line has an offset of 18 m in x-direction and is located at half of the channel height in the z-direction
3 Results and discussion
3.1 Validation of the 4D-MRV data
The applied 4D-MRV measurement and data processing procedure does not allow for a point-wise determination of the measurement uncertainty in time and space as possible for the LDA data. The before-mentioned velocity uncertainty based on the phase error of the phase-contrast imaging procedure must be considered as an underestimation of the measurement uncertainty, since it only gives a value for the global signal quality and does not consider effects resulting from phenomena of unsteady flows, such as varying flow-cycle durations.
The comparison of the 4D-MRV data with LDA data was made for the case M3 of Table 1. The results are shown in Fig. 8. Figure 8a, b show the velocity magnitude U in x-direction along the line in y-direction as defined in Fig. 7 across outlet B for the phase angle \(\Upphi=270^{\circ}\) and across outlet A for the phase angle \(\Upphi=90^{\circ}\). Figure 8c, d show the velocity data at fixed positions: (c) y = −17.5 mm near outlet B and (d) y = 22.5 mm near outlet A. These two diagrams show the phase-averaged data as a function of the phase angle of the flow cycle. The mean velocity values of the LDA data is plotted for 90 phase angles and was averaged with 500–1,000 samples per phase angle. The error bars are the resulting RMS values.

Comparison of velocity data from LDA and MRV. a Velocity downstream of outlet B for \(\Upphi=270^{\circ}\) along the line x = 18 mm and z = 0. b Velocity downstream of outlet A for \(\Upphi=90^{\circ}\) along the line x=18 m and z = 0. c Velocity downstream of outlet B at (x = 18 m, y = −17.5 m, z = 0) as a function of the phase angle. d Velocity downstream of outlet A at (x = 18 mm, y = 22.5 mm, z = 0) as a function of the phase angle
The results obtained with LDA and MRV demonstrate very good agreement as shown in Fig. 8. Differences in the resolution of the data resulting from the different measurement techniques are the spatial resolution of the LDA data, which was chosen lower than of the MRV data and the temporal resolution of the LDA data, which was chosen much higher than for MRV. All diagrams are in good agreement concerning the development of the velocity data in space (Fig. 8a, b) and in time (Fig. 8c, d). This can also be stated for the minimum and maximum velocity values. Both techniques precisely capture the periodic oscillation of the exiting jet with all details to be discussed in Sect. 3.2
The standard deviation of the LDA data shows higher values in regions of high velocity or at times (phase angles) of high velocity. However, the relative deviation related to the mean value remains of the same order. One additional observation can be made: in Fig. 8c, d the relative error increases significantly at the slopes of the time traces. This is certainly owed to the variation of the cycle length and variations of the different processes of the switching mechanism.
3.2 Reverse flow entrainment
This section discusses a mechanism by which fluid in the non-active outlet is entrained upstream by the jet and leaves the actuator through the active outlet together with the main flow. Since this mechanism increases the flow rate in the active outlet above the value of \(\dot{V}\), this mechanism is sometimes termed in the literature jet amplification. However, this effect needs to be distinguished carefully from entrainment effects by ejector nozzles used in other configurations of fluidic oscillators.
Table 3 shows a comparison of different flow rates for the measurement series M2 to M6. \(\dot{V}\) is the flow rate, specified in the controls of the flow supply system. \(\dot{V}_{{\rm{avg}}(A,B)}\) is the calculated flow rate, averaged over both outlets A and B and over time. \(\dot{V}_{\rm{max}}\) and \(\dot{V}_{\rm{min}}\) are the maximum or minimum flow rates determined from separate integration of areas A and B. These values are given as absolute numbers and in relation to \(\dot{V}_{{\rm{avg}}(A,B)}\).
Outlet flow rate enhancements of around 30 % were found and exceed the values given in the literature for the fluid oscillator working in steady state. Additionally, it can be observed that with increasing flow rate, the enhancement also increases. The data of M4 falls out of this order since \(\dot{V}\) and \(\dot{V}_{{\rm{avg}}(A,B)}\) differ significantly. M4 is the measurement with the highest VENC and, consequently, has the lowest SNR. This results in high uncertainty. Measurements M2 and M5 have the same flow rate, but different feedback-tube lengths. The integrated values \(\dot{V}_{{\rm{avg}}(A,B)},\,\dot{V}_{\rm{max}}\) and \(\dot{V}_{\rm{min}}\) show a comparable behavior. Scaling the reverse flow behavior and its effect on the jet oscillation and total flow rate is left for future study.
Figure 9a, b show the distribution and amplification of the flow rate for all phase angles of the oscillation for M2 and M3. The curve named “exit A + B” stands for the averaged flow rate through outlet A and B for each phase angle. “Mean A + B” is the averaged flow rate for both outlets and all phase angles. The red and the light blue curve represent the flow rates through outlets A or B, respectively.

Comparison of the jet amplification through outlets A and B for measurements M2 and M3. a M2. b M3
Concerning the temporal and spatial resolution of the measurement technique applied, the agreement and consistency of the data is good. Deviations of the curves “exit A + B” and “mean A + B” occur mainly during the jet-switching process. The curves for M3 show higher deviations. A possible explanation is the very short switching time of the jet between the two outlets. This quick process is not captured precisely with the limited temporal resolution (e.g., T res,M3 = 63.6 ms) of the 4D-MRV procedure.
3.3 Jet-switching mechanism
In the following, the jet-switching process is analyzed by investigating the flow inside the oscillator and the control ports. First, the switching process is segmented into different phases. Exemplarily, the 4D-MRV measurement series with a high temporal resolution, namely M5, was investigated. Figure 10 shows 16 of the 25 two-dimensional x-velocity contours in the center plane (xy-layer, z = 0) for M5. The plots show the velocity fields at 16 different phase angles of the cycle and are labeled in alphabetic order. The time between two consecutive plots is the temporal resolution of T Res = 84.8 ms, which is equivalent to a phase angle of 14.4°. All velocities are normalized with the reference velocity \(U_{\rm{ref}}=4\,{\hbox{m}}/{\hbox{s}}\) in the throat. The contour plots were smoothed by averaging five slices along the z-axis in between −2.4 mm ≤ z ≤ 2.4 mm, because no dependency in z-direction was found in the 3D velocity data.

Internal jet-switching process for measurement configuration M5, with \(U_{ref}=4\,{\hbox{m}}/{\hbox{s}}\). The phase lag between two consecutive plots is 14.4°. Plot a has an initial phase offset of 57.6°. The switching process is assigned for one half-cycle and can be segmented into three phases: plots a–c show the progress of the stay phase, plots d–l show the progress of the detachment phase and plots m–o show the progress of the attachment phase. Plots p, q show the beginning of the second half-cycle of the jet-switching process
The depicted half-cycle in Fig. 10 starts with a phase angle ϕ = 57.6° in plot (a) and ends with ϕ = 273.6° in plot (q). This was chosen such that the series of plots starts with the the jet just fully attached to Coanda wall A. Accordingly, the following analysis starts with plot (a). A little later, in plot (c), the jet in outlet A and the re-circulation in outlet B are fully developed. The above-discussed reverse flow effect is now at its peak value. Beginning with plot (d), the jet starts to detach from Coanda wall A. The detachment begins on Coanda wall A shortly downstream of the junction to control port A. This separation bubble no. 1 grows in size and thickness until the state shown in plot (l). Almost simultaneously, the re-circulation in outlet B starts to collapse in plot (j) and significantly decays in plots (k) and (l). On its way down to Coanda wall A, the jet is just in the middle of the interaction cavity and the jet is splitted in two parts exiting through both outlets, as shown in plot (m). In plot (n), the jet has arrived at Coanda wall B within just one time step. In plot (o), the first separation bubble on Coanda wall A is growing and a second separation bubble develops and grows at the splitter near exit A. In plot (p), both separation bubbles merge to a single, large re-circulation, filling the whole channel. The state shown in plot (n) is the mirrored version of plot (a), indicating that one half-cycle is completed. The rest of the cycle (not shown here) is identical to the above-described series of events.
In this manuscript, the internal jet-switching process is found to be a composition of three different phases: At first, a stay phase occurs, in which the jet is attached to one wall and is staying locally fixed. During this phase, the re-circulation develops by merging of the two separately growing re-circulation bubbles. In Fig. 10, the stay phase is represented by plots (a) to (c). Secondly, a detachment phase from one wall can be observed. The detachment starts with a slight movement of the jet away from Coanda wall and ends with the advancement to the center of the interaction cavity pointing directly onto the leading edge of the splitter. Plots (d) to (l) correspond to this phase. Finally, the influence of the opposite Coanda wall prevails, and hence, the jet moves toward this wall. This phase is termed attachment phase and occurs between plots (n) and (o).
The presented definition of the three phases can be used to compare all measurements with varying feedback-tube geometry and flow rates. In order to quantify the influence of these variations, it is appropriate to compare two measurements with an equal flow rate, but different feedback-tube geometry (M2 vs. M5) and two measurements with equal frequency, but different flow rates and feedback-tube geometry (M3 vs. M6). In addition to that the comparison of the measurements with identical feedback-tube geometry but different flow rate (M2 vs. M3) is insightful, but not further discussed in this manuscript. Table 4 summarizes the values of two parameters of the three defined phases. The relative length describes the duration of a specific phase in relation to the overall oscillation cycle duration. The absolute length stands for the physical duration of one phase in milliseconds.
The proposed distinction between different phases of the switching process is based on the different fluid-mechanical mechanisms responsible for each phase. First, the results of measurements M2 and M5 are compared. According to Table 1, the only geometric difference between both setups is the feedback-tube length, which is twice as long for M5 as for M2. It is well known that the length of the feedback tube influences the oscillation frequency, which is also the case here. Figure 11 presents an example on how the relative and absolute length of each phase can be interpreted. The most obvious difference between M2 and M5 is the relative and absolute length of the detachment phase. For the absolute length of the detachment phase, the correlation
was found. This suggests that the detachment phase is mainly influenced by the geometry (here: length) of the feedback tube. It is important to note that the durations of the phases can only be determined with an accuracy according to the temporal resolution T res of the phase-averaging procedure.

Relative and absolute length of the switching process for measurements M2 and M5
The most obvious accordance between M2 and M5 is the absolute length of the attachment phase. The attachment process is assumed to be dominated by the low-pressure region between the jet and the wall, responsible for the Coanda effect as well as for the jet amplification. For identical flow rates, the conditions for this part of the switching process are unchanged, which is assumed to yield the identical durations of the attachment process in M2 and M5.
The only difference between the setups M2 and M3 is the Reynolds number (flow rate). According to the literature and Fig. 5 a higher oscillation frequency is the result of an increased flow rate when all other parameters are fixed. However, Table 4 shows that the only significant difference in the absolute duration of the three phases is found for the attachment phase. This observation supports the assumption of a correlation between the duration of the attachment phase and the flow rate. The comparison of M3 and M6 also shows the expected dependence.
Another observation from the comparison of M2 and M3 is the almost identical absolute duration of the detachment process despite the significantly different flow rates and oscillation frequencies. For the cases investigated here, it can be summarized that the flow rate does not significantly influence the detachment process. It mainly influences the absolute duration of the attachment phase. However, a universal validity of this conclusion cannot be derived here.
It is known from the literature (Viets 1975) and confirmed in the diagram shown in Fig. 5 that the oscillation frequency increases with increasing feedback-tube diameter (cp. blue line with green line). Figure 5 also indicates, as modeled in Arwatz et al. (2008), that this influence decays with increasing flow rate (Reynolds number) since the frequency shift appears to be independent of the flow rate. The dependence of the oscillation frequency on the tube diameter was used to adjust the same oscillation frequency for two setups with different flow rates. The reduction in duration of the attachment phase from M6 to M3—assumed to be caused by the flow rate—is compensated by a prolongation of the detachment phase and the stay phase. More details on the processes involved in the stay phase are discussed in Sect. 3.4
The LDA data shown in Fig. 8d can be compared to the jet deflection model proposed by Arwatz et al. (2008). Arwatz et al. modeled the temporal dependency of the jet position between the two outlet ports on the pressure difference across the two control ports. The physics of the Coanda effect on the two inclined walls is considered too and very good agreement with experimental data was achieved. The time trace of the pressure difference between the control ports and the time trace of the resulting jet position as described in Arwatz et al. are shown in Fig. 12. The LDA velocity data of the present investigation correspond well to the jet position from the model (both plotted in blue), because the information on the jet position was extracted by Arwatz from dynamic pressures measured at the two outlets ports, which is where the LDA data were taken. Good agreement is also found for the pressures at the control ports, plotted in red. Note that the data from the model is the pressure difference across both control ports, while the pressure data from the present investigation is the static pressure in only one port. This also causes the 180 phase shift between the two red curves. The experimental data from the present study was aligned with the data taken from Arwatz et al. such that the pressure maxima at the control ports fall on top of each other. The resulting time traces of the jet position (velocity behind outlet port) agree remarkably well, supporting the validity of the modeling approach. In addition to that, further information on the detailed processes inside the actuator as described in this manuscript can now be added to the previous understanding of the modeling approach. While the jet position, resulting from the model and the LDA data, is an effect observed outside of the actuator, and the additional black line in Fig. 12 shows the detailed processes inside the actuator. The starting points of the three phases defined above are marked on the black curve corresponding to sub-plots (a), (d), (m) and (o) of Fig. 10. The stay phase, (a) to (d), corresponds to the plateau of the modeled jet position, while the jet is not moving. However, even before the jet begins to move, processes inside the actuator start, indicated by the beginning of the detachment phase, (d) to (m). The jet starts to move quite some time after these processes (mainly flow separations) have begun. This observation is the main difference to the previously published model. However, this is not in contradiction to the previous understanding, since these results describe the processes inside the actuator and therefore add further understanding for the mechanisms involved.

Comparison of velocity through outlet A (taken from LDA data shown in Fig. 8d), pressure distribution at control port A, the valve switching model proposed by Arwatz et al. (2008) and the three phases of the internal jet-switching process described in Fig. 10. LDA data and pressure signal at control port A have conditions equal to measurement configuration M3. The phases of the jet-switching process were analyzed for measurement configuration M5
3.4 Control-port flow
In this section, the flow through the control ports and inside the feedback tube is analyzed. Two two-dimensional measurements M7 and M8 (xy-plane and yz-plane) were conducted for this purpose, both with the same flow conditions as for configuration M5 but with a significantly higher temporal resolution. The advantage of conducting two separate measurements is that the velocity sensitivity VENC can be chosen separately for resolving the comparably low velocities in the feedback tube appropriately. Secondly, the acquisition time for 2D measurements is comparatively short, which allows to increase the SNR by averaging multiple single scans (Table 1) and to realize a higher temporal resolution.
Figure 13a–d show the velocity distribution inside the interaction cavity of the fluidic oscillator (xy-plane on the right) and inside the control ports (yz-plane on the left) for four different phase angles (I) to (IV). The most important observations are as follows: in Fig. 13a, c the magnitude of the velocities in y-direction is the highest in the control ports, while Fig. 13b, d show zero magnitude of the y-velocity in the control ports.

Left slice (measurement M8): velocity plot through the control ports in yz-layer showing the velocity component in y-direction (V) // Right slice (measurement M7): velocity plot through the oscillator in xy-layer showing the velocity component in x-direction (U). a ϕ = 7°, point (I). b ϕ = 91°, point (II). c ϕ = 183°, point (III). d ϕ = 268°, point (IV)
Figure 13 shows that the fluid through the feedback tube is accelerated and decelerated during an oscillation cycle. The maximum velocities through the feedback tube occur while the jet is switching between the Coanda walls (Fig. 13a, c), and the fluid in the feedback tube stands still (changes direction) when the jet is fully attached to one Coanda wall (Fig. 13b, d). Figure 13b, d, together with Fig. 12, support the existence of the stay phase. During this phase, the flow inside the feedback tube is changing its direction, after a short stagnation of the fluid in the tube and the ports. This happens shortly after the pressure maximizes at one control port. This was also found by Koso et al. (2002).
In Fig. 13c, the jet is on its way to the lower Coanda wall. The color of the velocity plot on the left side is mainly blue at the control ports, which implies that fluid is moving in negative y-direction. Small areas with reverse moving fluid are visible on the upper and the lower edge of the jet. Both result from different effects: on the upper edge, the fluid of the jet is still drawn upwards to the wall. The upper outlet is still active. On the lower edge, strong jet entrainment occurs, entraining fluid into the jet. The latter effect will slow down the fluid inside the feedback tube and will reverse the direction of the movement. Equal but mirrored effects are visible in Fig. 13a. As explained above, in Fig. 13d, the fluid stands still inside the control ports and the feedback tube. Strong entrainment occurs on the lower side of the jet, indicated by high positive velocity values in y-direction. Since the jet is attached to the lower Coanda wall, fluid is drawn out of the lower control port, which is the beginning of the detachment process at this wall. The high negative velocity values in y-direction in the center of the jet result from the curvature of the jet being bend down to the lower Coanda wall. The fluid that is drawn out of the lower control port causes a suction effect at the upper control port, since both ports are connected via the feedback tube. Both, the fluid exiting the lower control port and the fluid entering the upper control port, create a pressure difference between both ports that initiates the next jet-switching process as already described by Arwatz et al. (2008).
The data indicate that a mass flow is moved through the feedback tube. This supports the assumption that the oscillation is not driven by acoustic phenomena for the water flow and Reynolds numbers investigated here.
The diagram in Fig. 14 shows the velocities in y-direction at a single point in control port A for one whole cycle. The position of the point is marked with a cross in the contour plot to the left of the diagram, which shows the y-direction velocities for the fixed phase angle ϕ = 183°. Note that the uneven maximum at control port A is the result of secondary flows induced by the 90° bend into the feed-back tube. Simultaneously, a flat velocity distribution is present in control port B. This is caused by the switching jet, which pushes a whole column of water into the control port.

Velocity value at control port A. The cross in the contour plot marks the position of the displayed velocity curve for the fixed phase angle ϕ = 183°. The four chosen phase angles, defined in Fig. 13, are marked in the velocity curve with roman numbers (I–IV)
4 Conclusions
In this work, the internal flow of a bi-stable fluidic oscillator was investigated using the phase-averaged measurement procedure 4D-Magnetic Resonance Velocimetry. A major experimental difficulty was the development of the triggering system, which supplies the MR scanner with a trigger signal, marking the beginning of a new flow cycle. A piezo-foil pressure transducer was capable of operating reliably in the harsh environment inside an MR scanner without impairing the quality of the MRV data by its presence near the measurement volume. The fluidic-oscillator geometry was taken from Arwatz et al. (2008), modified in size and operated with water in order to match the requirements of the MRV measurements, such as spatial resolution and oscillation frequency. In a parameter study, the oscillation frequency, the feedback-tube length and its diameter, and the flow rate were varied and their effects investigated.
New insights into the flow mechanisms inside the investigated bi-stable fluidic oscillator were obtained: The reverse flow entrainment of the jet-drawing fluid upstream through the non-active outlet depends mainly on the flow rate and reaches 30 % in one of the configurations. The internal jet-switching process was visualized and analyzed. The flow half-cycle was divided into three phases: the stay phase, the detachment phase and the attachment phase.
During the stay phase, the jet stays attached to one Coanda wall, while the flow through the feedback tube is changing its direction. The duration of this phase is mostly influenced by the feedback-tube geometry. The stay phase ends, when first small separation bubbles initiate the separation.
The detachment phase is strongly influenced by the feedback-tube geometry. A doubling of the feedback-tube length led to a doubling of the duration of this phase. During the detachment process, the jet separates from one Coanda wall. The end of this phase is defined as the moment when the jet has arrived at the center of the interaction chamber on its way to the opposite Coanda wall. This is also the moment when the reversed flow in the non-active outlet has stopped.
The last phase is the attachment of the jet to the opposite wall. During this phase, the switching process completes and the separation bubble that initiated this switching event grows rapidly in size. The attachment phase ends after full attachment and another stay phase before the next switching event begins. The duration of the attachment phase reduces as the bulk flow velocity increases.
Additional measurements inside the control ports and pressure measurements at the control ports revealed the details of the pressure gradient-driven oscillatory flow through the feedback tube and its involvement in the switching process. Entrainment of fluid into the feedback tube at one control port and the consequently exiting fluid through the other port causes a separation that initiates the switching mechanism of the jet.
A comparison with the results from the model for the fluidic oscillator developed by Arwatz et al. (2008) shows excellent agreement. Additional information on the details of the internal mechanisms of the jet-switching process extends the understanding of this type of fluidic actuator.
References
Arwatz G, Fono I, Seifert A (2008) Suction and oscillatory blowing actuator modeling and validation. AIAA J 46(5):1107–1117
Canstein C, Cachot P, Faust A, Stalder AF, Bock J, Frydrychowicz A, Küffer J, Hennig J, Markl M (2008) 3D MR flow analysis in realistic rapid-prototyping model systems of the thoracic aorta: comparison with in vivo data and computational fluid dynamics in identical vessel geometries. Magn Reson Med 59(3):535–546
Cattafesta LN, Sheplak M (2011) Actuators for active flow control. Annu Rev Fluid Mech 43(1):247–272
Coanda H (1936) Device for deflecting a stream of elastic fluid projected into an elastic fluid. Pat. No. 2052869
Darabi A, Wygnanski I (2004) Active management of naturally separated flow over a solid surface. Part 1. The forced reattachment process. J Fluid Mech 510:105–129. doi:10.1017/S0022112004009231
Elkins C, Markl M, Pelc N (2003) 4D magnetic resonance velocimetry for mean velocity measurements in complex turbulent Flows. Exp Fluids 34:494–503
Elkins CJ, Alley MT (2007) Magnetic resonance velocimetry: applications of magnetic resonance imaging in the measurement of fluid motion. Exp Fluids 43(6):823–858 doi:10.1007/s00348-007-0383-2
Gokoglu S, Kuczmarski M, Culley D, Raghu S (2009) Numerical studies of a fluidic diverter for flow control. In: AIAA proceedings, December. American Institute of Aeronautics and Astronautics, 1801 Alexander Bell Dr, Suite 500 Reston VA 20191-4344 USA
Gregory JW, Sullivan JP, Raghu S (2005) Visualization of jet mixing in a fluidic oscillator. J Vis 8(2):169–176
Grundmann S, Wassermann F, Lorentz R, Jung B, Tropea C (2012) Experimental investigation of helical structures in swirling flow. Int J Heat Fluid Flow 37:51–63
Guyot D, Paschereit C, Raghu S. (2009) Active combustion control using a fluidic oscillator for asymmetric fuel flow modulation. Int J Flow Control 1(2):155–166
Haacke M, Brown R, Thompson M, Venkatesan R (1999) Magnetic resonance imaging: physical principles and sequence design. Wiley, New York
Huang F, Akao J, Vijayakumar S, Duensing GR, Limkeman M (2005) k-t GRAPPA: a k-space implementation for dynamic MRI with high reduction factor. Magn Reson Med 54(5):1172–1184
Koso T, Kawaguchi S, Hojo M, Hayami H (2002) Flow mechanism of a self-induced oscillating jet issued from a flip-flop jet nozzle. In: JSME-KSME fluids engineering conference, vol 5, pp 1–6
Markl M, Chan FP, Alley MT, Wedding KL, Draney MT, Elkins CJ, Parker DW, Wicker R, Taylor Ca, Herfkens RJ, Pelc NJ (2003) Time-resolved three-dimensional phase-contrast MRI. J Magn Reson Imaging 17(4):499–506
Nishri B, Wygnanski I. (1998) Effects of periodic excitation on turbulent flow separation from a flap. AIAA J 36(6):547–556
Nitsche W, Mirow P, Szodruch J (1989) Piezo-electric foils as a means of sensing unsteady surface forces. Exp Fluids 7(2):111–118
Raman G, Packiarajan S, Papadopoulos G, Weissman C, Raghu S (2005) Jet thrust vectoring using a miniature fluidic oscillator. Aeronaut J 109(1093):129–138
Raman G, Rice E, Cornelius D (1994) Evaluation of flip-flop jet nozzles for use as practical excitation devices. J Fluids Eng 116(3):508–515
Seele R, Tewes P, Woszidlo R, McVeigh Ma, Lucas NJ, Wygnanski IJ (2009) Discrete sweeping jets as tools for improving the performance of the V-22. J Aircr 46(6):2098–2106
Seifert A, Bachar T, Koss D, Shepshelovich M, Wygnanski I (1993) Oscillatory blowing: a tool to delay boundary-layer separation. AIAA J 31:2052–2060
Seifert A, Stalnov O, Sperber D, Arwatz G (2009) Large trucks drag reduction using active flow control. Lecture notes in Applied and Computational Mechanics. Springer, Berlin, pp 115–131
Spyropoulos CE (1964) A sonic oscillator. In: Proceedings of the fluid amplification symposium, vol. III. Harry Diamond Laboratories, Washington, DC, pp 27–51
Tesar V, Bandalusena HCH (2010) Bistable diverter valve in microfluidics. Exp Fluids 50(5):1225–1233
Tesar V, Hung C, Zimmerman W (2006) No-moving-part hybrid-synthetic jet actuator. Sens Actuators A Phys 125(2):159–169
Viets H (1975) Flip-Flop jet nozzle. AIAA J 13(10):1375–1379
Yang JT, Chen CK, Tsai KJ, Lin WZ, Sheen HJ (2007) A novel fluidic oscillator incorporating step-shaped attachment walls. Sens Actuators A Phys 135(2):476–483
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Wassermann, F., Hecker, D., Jung, B. et al. Phase-locked 3D3C-MRV measurements in a bi-stable fluidic oscillator. Exp Fluids 54, 1487 (2013). https://doi.org/10.1007/s00348-013-1487-5
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-013-1487-5