
Abstract
This paper aims to investigate cycle-to-cycle variations of non-reacting flow inside a motored single-cylinder transparent engine in order to judge the insertion amplitude of a control device able to displace linearly inside the inlet pipe. Three positions corresponding to three insertion amplitudes are implemented to modify the main aerodynamic properties from one cycle to the next. Numerous particle image velocimetry (PIV) two-dimensional velocity fields following cycle database are post-treated to discriminate specific contributions of the fluctuating flow. We performed a multiple snapshot proper orthogonal decomposition (POD) in the tumble plane of a pent roof SI engine. The analytical process consists of a triple decomposition for each instantaneous velocity field into three distinctive parts named mean part, coherent part and turbulent part. The 3rd- and 4th-centered statistical moments of the proper orthogonal decomposition (POD)-filtered velocity field as well as the probability density function of the PIV realizations proved that the POD extracts different behaviors of the flow. Especially, the cyclic variability is assumed to be contained essentially in the coherent part. Thus, the cycle-to-cycle variations of the engine flows might be provided from the corresponding POD temporal coefficients. It has been shown that the in-cylinder aerodynamic dispersions can be adapted and monitored by controlling the insertion depth of the control instrument inside the inlet pipe.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
One of the most important targets of the in-cylinder flow control is to reduce the dispersions between the engine cycles. Favorable aerodynamics to combustion process being expected in order to decrease exhaust pollutant emissions and optimize engine efficiency, a satisfactory cyclic reproducibility is highly required. A variety of researches have been stimulated by the above motivation to further understand the vortex motion behaviors and evaluate the cycle-to-cycle variations (Towers and Towers 2004; Guibert and Le Moyne 2002; Rempfer and Fasel 1994; Matekunas 1983; Young 1981; Enotiadis et al. 1990). As demonstrated by these works, the cyclic variability is directly linked to turbulence, pressure variations at inlet and exhaust strokes, acoustics phenomena in pipes, mixing process induced modified thermodynamic evolution, local equivalence ratio, flame velocity, heat transfer, quenching, IGR and EGR quantity… All mentioned features are inter-dependent and have great impacts on the ignition and the development of the turbulent flame. In particular, the instability of the coherent structures (Brown and Roshko 1974; Hussain 1986; Lumley 1967; Berkooz 1991) that contain mainly the kinetic energy seems to be the major actor of the cycle-to-cycle variations. According to Heywood (1988), the vortex created at intake stroke undergoes compression and breakdowns into small-scale structures before ignition. The vortex generating and breaking processes are influenced by engine design (Eichenberger and Robert 1999; Han and Reitz 1995; Kuwahara and Ando 2000; Huang et al. 2009; Huang et al. 2008). Successively, the intensity of the turbulence affects locally and heavily the propagating speed of the flame traveling across the combustion chamber (Tabaczinski 1990). As remarked in Druault et al. (2005), the large-scale organized fluid motions and the turbulence vary significantly from one engine cycle to the next. Consequently, the engines are less efficient than they might be due to the fact that the combustion process initiates from different conditions.
Aiming to prepare an in-cylinder aerodynamics with reduced cyclic dispersions, a relevant solution of intake port geometry modification was proposed by implementing charge motion control valves far upstream of the intake valves (Floch et al. 1995; Isaka and Higaki 1995; Zhongchang et al. 2002; Jebamani and Kumar 2008) or air jets and flaps in the pipe near the intake valves. As described in Stansfield et al. (2007) for SI engines, a tumble (a rotational fluid motion with an axis perpendicular to the cylinder axis) is generated at the intake stroke by the upper jet coming from the intake port. Meanwhile, the lower jet descends along the cylinder wall to result a recirculation zone. This recirculation zone might perturb the principle fluid structure and therefore increase the cyclic variability. The authors expected to promote the tumble development and decrease the influences of the recirculation zone by controlling both upper and lower jets. The engine performance and the volumetric efficiency are still preserved thanks to the control instrument minimization.
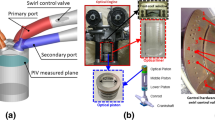
In the current work, the strategy implemented was proposed by Lenglet (2006). A flap is placed in the intake port near the inlet valve and can be linearly displaced. The control facility generates a small upstream perturbation, which in turn modifies the downstream flow field (refer to Fig. 1). At each CAD and for each fixed insertion depth of the control flap, the PIV measurements were performed on the tumble plane during 250 consecutive engine cycles. The PIV technique is now a well-established optical measurement method achieved by many relevant scientists to study the engine flow behaviors (Fansler 1993; Reeves et al. 1994, 1996, 1999; Reuss et al. 1989; Westerweel 1997). We recorded the resulting two-dimensional velocity fields and then analyzed them by the POD.

Schematic (not in scale) of the flap placed in the intake port and location of the PIV measurement plane coinciding with the tumble plane
In regard to the POD, the method first introduced for fluid mechanics by Lumley (1967) is actually considered as a powerful mathematical tool. According to Lumley (1967), a coherent structure has the largest mean square projection of the velocity field. The essential idea of the POD is finding among a set of realizations of the flow fields the one that maximizes the mean square energy. The method has been intensively investigated for real-time flow control and physical process simulation because of its ability to yield a basis for low-order dynamic systems (Berkooz 1991; Ly and Tran 2001; Utturkar et al. 2005; Rowley et al. 2004; Ravindran 2002; Epureanu 2003; Perret et al. 2006), and especially for the cyclic variability evaluation via statistical properties of the POD temporal coefficients (Druault et al. 2005; Druault and Chaillou 2007; Roudnitzky et al. 2006; Cosadia et al. 2006; Bizon et al. 2010; Fogleman et al. 2004; Graftieaux et al. 2001).
The paper is organized as follows. At first in Sect. 2, the experimental setup of the measured data is outlined. Section 3 then reviews the theoretical features of the POD and presents concretely the multiple snapshot POD used. The analysis of the cycle-to-cycle variations and the evaluation of the insertion depth of the control instrument are focused on in Sect. 4. The article is ended by several conclusions and perspectives.
2 Experimental setup
2.1 Model engine
The model engine is built using a transparent cylinder, which offers some wide optical accesses prior to the PIV measurement of the aerodynamic fields inside the combustion chamber. The cylinder head has two intake valves, two exhaust valves and a pent roof. The engine with a flat piston is driven at 1,200 rpm without firing. One cycle duration is 0.1 s, which corresponds to a frequency of 10 Hz. Refer to Table 1 for the engine specifications.
A control flap is located 20 mm upstream the inlet valve and can be moved linearly inside the inlet pipe. Three cases of insertion depth of the control flap called S1, S2 and S3 are tested. The perturbation is generated by plate protrusion from 0 mm for S1 to 3 mm for S3 (Fig. 1), allowing a slightly intrusive control.
2.2 PIV measuring system
The tracer particles (silicon oil droplets of approximately 1 μm diameter) are introduced in the intake plenum and illuminated by a light sheet of less than 1 mm thickness emitted from a double-pulsed Nd-YAG laser (Spectra Physics PIV 200 with a wavelength of 532 nm). The droplet size was measured by the phase Doppler anemometry (PDA) method. The scattered light is captured by a CCD camera (Dantec Flowsence 2 M, 8 bits) with a resolution of 1,600 × 1,186 pixels (height × width). The output energy at a wavelength of 532 nm is in the range of 120–140 mJ per pulse, with pulse duration of 12 ns. The frequency of the pulses is 10 ± 0.6 Hz allowing cycle-to-cycle continuous acquisition. The double-exposure imaging is realized through the transparent cylinder with a camera focused on the tumble geometric plane (plane containing the cylinder axis passing between the two intake valves in Fig. 1). The spatial resolution is about 56 μm/pixel.
At each CAD and for each fixed insertion depth (see Fig. 1), the PIV measurements were performed on the tumble plane. For example, for the first flap position (S1) at 90-CAD ATDC, 250 consecutive PIV snapshots corresponding to 250 consecutive engine cycles were obtained. This procedure is carried out every 10 CAD from 90-CAD ATDC to 280-CAD ATDC for three flap insertion depths.
During the processing of the PIV images, the average displacement of the particles is first calculated using a cross-correlation algorithm with an interrogation window of 32 × 32 pixels and an overlap of 50%. Then, an interpolation based on the 3 × 3 neighbors replaces a small number of false vectors (0.5%). For each instantaneous velocity field, 99 × 73 instantaneous velocity vectors are finally provided with a spatial resolution of 0.896 mm.
2.3 Cyclic dispersions of flow fields
The field of view represents roughly the whole tumble plane surface inside the combustion chamber. In Fig. 2, six instantaneous velocity fields at different instants (cycles) t i with i = 1…6 corresponding to six consecutive engine cycles taken by the PIV measurement for the first flap position (S1) at 250-CAD ATDC are presented. The gray level representing the velocity amplitude (m/s) is superposed by the two-dimensional streamlines allowing observation of the fluid motions existing within the cylinder.

Cycle-to-cycle variations of the flow fields for S1 at 250-CAD
At the beginning of the compression stroke, both upper and lower jets coming from the intake port are vanished and there is apparently no effect of admission existing in the velocity fields. In contrast, the piston (at the bottom of the images) moves upwards to break the large-scale structures to generate the turbulence. The dynamics of the piston have important impacts on the engine flow forcing an air motion on the right hand side at the bottom of the images. As the tumble rotates in a counter-clockwise direction, the piston enhances largely the air motion of the right hand side, which has an upward flow direction similar to the piston movement. Inversely, the air motion at the left hand side having a downward flow direction is prevented or even broken by the piston ascension. Especially, the behaviors of the tumble motions are different between the consecutive cycles in terms of morphology, position and intensity. Consequently, the turbulence generated from its breaking process varies significantly cycle by cycle. These cyclic dispersions are the major factors decreasing the engine performance since the combustion is initiated from different aerodynamic conditions.
3 Proper orthogonal decomposition
The POD has already been introduced by the formulas proposed in the literature. One can refer to Druault et al. (2005), Sirovich (1987), Holmes et al. (1998), Berkooz et al. (1993), Lumley (1967) for a detailed methodology. In this study, the snapshot POD (Sirovich 1987) is convenient and will be investigated because the number of collected samples is smaller than the space discretization. A phase-dependent multiple snapshot POD carried out at each CAD called POD-MS integrates simultaneously three control device positions (S1, S2 and S3) in the same database. Consequently, all flap positions have an identical POD eigenfunctions at each CAD. In contrast, different POD temporal coefficients are distributed depending on the control facility positioning. Therefore, an evaluation of the insertion depth of the control instrument in terms of cycle-to-cycle variations might be expected by comparing S1, S2 and S3. Note that no information of phase resolution within an engine cycle would be provided because the POD-MS considers separately the crank angle degrees. The POD-MS method applied for two-dimensional velocity vector PIV database is briefly described by the following subsections.
3.1 Analysis
At a given θ-CAD [θ-CAD takes one value of 90-CAD, 100-CAD, 110-CAD … 280-CAD], each flap position S k has a set of N t = 250 two-dimensional PIV snapshots expressed by a matrix function \( \vec{U}(S_{k} ,\;X_{m} ,\;t_{i} ) \) where S k (K = 1…N s ) is the insertion depth considered, N s = 3 number of the control flap positions (S1, S2 and S3), X m (m = 1…N m ) is the space variables signifying the node points of the PIV mesh, N m = 99 × 73 is the total number of node points of the PIV mesh, t i (i = 1…N t ) is the ith engine cycle.
The POD-MS applied at θ-CAD is started by considering the instantaneous velocity field taken for the insertion depth S k at engine cycles t i and the one for S h at t j . The velocity correlation tensor is defined by:
where c = 1 and c = 2 correspond, respectively, to the horizontal and the vertical velocity components (Nc = 2 is the total number of velocity components taken into account). The expression illustrates clearly that the POD-MS is a snapshot POD carried out at θ-CAD, except its cumulative set of snapshots including the realizations of S1, S2 and S3 in one unique database.
Let us get in detail the POD-MS at a concrete θ-CAD. Figure 3 shows the construction of the velocity matrix that serves in the calculation of the velocity correlation tensor above. A N m × N t matrix cumulating all snapshots of horizontal velocity component U 1 for flap position S1 at θ-CAD, that is, U 1 (S 1, X m , t i ) is built-up and then contributes to the matrix. The procedure is similar for the vertical velocity component U 2. As seen in Fig. 3, two features are simultaneously integrated in the velocity matrix: the insertion depths and the engine cycles referenced, respectively, by S k (K = 1…N s ) and t i (i = 1…N t ).

Construction of the velocity matrix of the POD-MS carried out at θ-CAD
Next, the Fredholm integral eigenvalue problem is computed from the velocity correlation matrix R to deduce a discrete series of POD temporal coefficients contained in matrix A and their corresponding POD eigenvalues\( \lambda^{(n)} \):
with \( A^{(n)} = \left( {a^{(n)} \left( {S_{1} ,t_{1} } \right), \ldots ,a^{(n)} \left( {S_{1} ,t_{{N_{t} }} } \right),a^{(n)} \left( {S_{2} ,t_{1} } \right), \ldots ,a^{(n)} \left( {S_{2} ,t_{{N_{t} }} } \right),a^{(n)} \left( {S_{3} ,t_{1} } \right), \ldots ,a^{(n)} \left( {S_{3} ,t_{{N_{t} }} } \right)} \right) \) as the nth POD temporal coefficients. One can find out that A (n) is a vector containing \( N_{n} = N_{t} \times N_{S} = 250 \times 3 = 750 \) elements and is able to supply the information about the flap positions (referenced by S k with K = 1…3) as well as the aerodynamic dispersions at θ-CAD between the engine cycles (referenced by t i with i = 1…250). In addition, the number of POD modes is \( N_{n} = N_{t} \times N_{S} = 250 \times 3 = 750 \).
For the sake of clarity, let us illustrate the arrangement of the matrix synthesizing the ensemble POD temporal coefficients at θ-CAD by Fig. 4. This matrix is constructed by placing side by side the vectors of POD temporal coefficients A (n) with n = 1…N n . The impact of the insertion depths of the control flap at θ-CAD can be underlined thanks to the structure of the matrix. Each column corresponds to A (n) relating to the nth POD mode. The first region that consists of first N t lines represents the snapshots of the flap position S1 at θ-CAD. The flap positions S2 and S3 own the two next same-sized areas.

Matrix including all POD temporal coefficients at one CAD
The POD-MS at θ-CAD is ended by calculating the nth POD eigenfunctions relative to the velocity component U c , which is determined by projecting this component onto the POD temporal coefficients:
In contrast with the POD temporal coefficients, the eigenfunctions \( \vec{\Upphi }^{(n)} = (\Upphi_{1}^{(n)} ,\Upphi_{2}^{(n)} ) \) depend solely on the mesh point and therefore allow spatial specifications. We insist that the cycle-to-cycle dispersions given by the POD temporal coefficients and the effects of the insertion depths of the control flap are possibly obtained because the corresponding POD eigenfunctions are guaranteed to be identical for all three flap positions at one CAD considered.
3.2 Synthesis
In the previous subsection, the phase-dependent POD-MS is performed at θ-CAD. The velocity fields at θ-CAD depend on the space variable, the time variable and the insertion depth of the control device. Thus, the components of the velocity fields at θ-CAD are reconstructed as a linear combination of the POD modes. This procedure is done without difficulty knowing the structure of the matrix containing the POD temporal coefficients (Fig. 4):
Such reconstruction keeps the same total velocity field when the ensemble of eigenmodes is included in the formula. It is well known that a good approximation of the velocity fields is expected by using the first dominant modes in which the kinetic energy of the flow is concentrated. Additionally, the equation confirms the dependence of the velocity fields on the POD temporal coefficients and the POD eigenfunctions. As mentioned before, the cycle-to-cycle variations of the flow fields impacted by different insertion depths of the control flap can be studied via the POD temporal coefficients \( a^{(n)} (S_{k} ,t_{i} ) \) since the POD eigenfunctions \( \Upphi_{c}^{(n)} (X_{m} ) \) are identical for three flap positions. Such interesting property of the POD-MS permits an analysis of the cyclic variability, which will be presented in the following section.
4 Cycle-to-cycle variation analysis
The cyclic dispersions of the in-cylinder flows impact greatly the process generating turbulence and the combustion efficiency. Particularly, the cycle-to-cycle variations of the tumble are the major factor of such aerodynamic variability and therefore are solely focused on. We aim essentially to recommend which flap position among S1, S2 and S3 gives the less cycle-to-cycle variations. In order to distinguish the cyclic variability levels of the tumble motion influenced by the insertion depths, the POD triple decomposition (Roudnitzky et al. 2006; Druault et al. 2005) would be useful because it allows us to divide each instantaneous flow into three parts representing distinctive features. The mean part is associated with the most energetic vortex and therefore the average velocity field. The coherent part describes the cyclic variability of the vortex motions. The turbulent part links to the turbulent small-scale structures. Expecting to evaluate the impacts of the insertion depths on the cycle-to-cycle variations, we carry out at first a POD triple decomposition and then compare the coherent parts corresponding to S1, S2 and S3.
4.1 POD triple decomposition
The POD triple decomposition divides each instantaneous velocity field into three parts via the following expressions. Note that the sum of the coherent and turbulent parts is obviously the fluctuation part of the flow field.
The mean part covers the most energetic modes (\( 1 \div M \)) and represents the average flow. The cycle-to-cycle variations are described by the coherent part, which is reconstructed by the intermediate modes (\( M + 1 \div C \)) and contains mainly the fluctuating energy. The less energetic modes (\( C + 1 \div N_{n} \)) are contributed to the turbulent part for the small-scale fluid structures.
In fact, the decomposition of the engine flow into three parts involves the determination of the cutoff modes M and C appearing in the above equations. These cutoff modes may be different depending on the crank angle degrees and the insertion depths. The separation between the mean and fluctuation parts, that is, choosing M, and the separation between the coherent and turbulent parts, that is, choosing C, are successively presented.
4.1.1 Separation of the mean and fluctuation parts
The determination of the cutoff mode M is based on three outstanding properties of the mean part: the large amount of the kinetic energy is distributed to this part; the flow fields reconstructed by M first dominant modes have a negligible cyclic variability and are highly correlated. These criteria allow two methods to distinguish the mean and fluctuation parts.
The first method profits from the standard deviation of the POD temporal coefficients permitting a cycle-to-cycle variation evaluation. At a given θ-CAD, considering the insertion depth S k , the standard deviation of the temporal coefficients corresponding to the nth POD mode is:
where \( \overline{{a^{(n)} (S_{k} )}} = \frac{1}{{N_{t} }}\sum\nolimits_{i = 1}^{{N_{t} }} {a^{(n)} (S_{k} ,t_{i} )} .\)
As illustrated in Fig. 5, the standard deviations of the temporal coefficients corresponding to the first two modes are more moderate than the high-order modes though the energetic differences between the POD modes are ignored. The behavior of the third mode is stated to be similar to the higher modes. Consequently, these modes are chosen as the mean part. By tabulating the POD eigenvalues, the accumulated energy of the first two modes is equal to λ(1) + λ(2) and can be estimated superior to 75%, which confirms that the majority of the kinetic energy is attributed to the mean part. The fluctuating part owns 25% of the kinetic energy.

Standard deviations of the temporal coefficients of mode 1 (circle), mode 2 (square), mode 3 (triangle) and higher modes (gray lines)
The second method to determine M is based on the high correlation between the velocity fields reconstructed by the modes of the mean part since this part represents the cycle-averaged flow field. For the insertion depth S k at θ-CAD, the correlation of the velocity component \( U_{c}^{{(n_{1} ,n_{2} )}} \) between two snapshots taken at t i and t j reconstructed by the POD modes from n 1 to n 2 is calculated by the following formula:
where \( U_{c}^{{(n_{1} ,n_{2} )}} (t_{i} ) = U_{c}^{{(n_{1} ,n_{2} )}} (S_{k} ,X_{m} ,t_{i} ) = \sum\limits_{{n = n_{1} }}^{{n_{2} }} {a^{(n)} (S_{k} ,t_{p} )\Upphi_{c}^{(n)} (X_{m} )} \).
In Fig. 6, the triangle, circle and square represent S1, S2 and S3, respectively, at 90-CAD, 180-CAD and 270-CAD. The average values of the correlation coefficients of the horizontal and vertical velocity components of the whole fields are depicted by the black symbols at the top right corner of the images. In this case, all modes are utilized or n 1 = 1, n 2 = N n in Eq. 10.

Correlation of velocity fields during the accumulative removal of the first modes at 90-CAD (left), 180-CAD (middle) and 270-CAD (right)
In order to determine which modes contribute greatly to the correlation of the flow fields, we eliminate cumulatively the first modes. When mode 1 is removed or n 1 = 2, n 2 = N n are applied in the above equation, the correlation of the flow fields represented by the dark gray symbols chute greatly. In case without modes 1 and 2 (n 1 = 3, n 2 = N n ), the gray symbols show clearly the same tendency. Inversely, the removal of the first three modes or more (lighter symbols) causes only a minor change in the correlation. As a result of the flow analysis, the first two modes contribute substantially on the correlation of the total velocity fields and should be included in the mean part and M = 2.
For a better understanding of Fig. 6, we draw the correlation of the velocity fields of the control flap position S1 when the first modes are cumulatively eliminated in Fig. 7. Each curve corresponds to a crank angle degree 90-CAD, 180-CAD and 270-CAD. Let us consider each curve (180-CAD, for example). The first point (which has a horizontal coordinate of 0) is the correlation of the velocity fields. The second point representing the correlation when mode 1 is removed has a horizontal coordinate of 1. The third point representing the correlation without modes 1 and 2 has a horizontal coordinate of 1:2. The last point (which has a horizontal coordinate of 1:20) corresponds to the correlation when first twenty modes are eliminated. One can remark easily that the correlation of the flow fields decreases substantially when the first two modes are eliminated. In contrast, the removal of the first three modes or more causes only negligible effects on the correlation.

Correlation of velocity fields during the accumulative removal of the first modes at 90-CAD, 180-CAD and 270-CAD for S1
4.1.2 Separation of the coherent and turbulent parts
The separation of the coherent and turbulent parts is a challenging task that relates to the identification of the cycle-to-cycle variations of the large-scale structures and the turbulence. One hypothesis allowing a coherent part filtering is to consider the existence of a modal boundary between the coherent part (lower modes) and a homogeneous isotropic turbulence (higher modes). This assumption has to be verified by finding a modal range given by well-known Gaussian properties of the homogeneous isotropic turbulent flows given in Pinsky et al. (2004): The skewness and flatness reach 0 and 3, respectively. Note that during the filtering process, the values of the cutoff modes will be obtained by taking into account solely the POD temporal coefficients corresponding to one insertion depth S k at each time t i .
where U′ is the velocity component of homogeneous isotropic turbulent flows.
Supposing that the homogeneous isotropic turbulence is built by the POD modes from C + 1 to H, the total velocity flow in Eq. 5 becomes:
with U IHT (X, t) reconstructed by modes from C + 1 to H and U NIHT (X, t) by modes from H + 1 to N n . As shown by the equation above, the separation of the coherent and turbulent parts would be done if one knows which POD modes contribute to the isotropic homogeneous turbulence. It is interesting to look into the evolution of the spatial averages of the flatness and skewness defined by the following equations as well as their spatial standard deviations by varying the POD modes used in the velocity field reconstruction:
and \( U_{c}^{\prime } (S_{k} ,X_{m} ,t_{i} ) = \sum\limits_{{n = n_{1} }}^{{n_{2} }} {a^{(n)} (S_{k} ,t_{i} )\Upphi_{c}^{(n)} (X_{m} )} \) velocity fields reconstructed.
In order to determine the cutoff modes of the isotropic homogeneous turbulence (C + 1 and H), a parametric study of \( S_{{U_{c}^{\prime } }} \) and \( F_{{U_{c}^{\prime } }} \) for two velocity components of each insertion depth at each CAD is performed by varying both n 1 and n 2 in Eq. 13. The important question is: Which pair of (n 1, n 2) if it exists would guarantee the skewness and the flatness near 0 and 3, respectively? To answer such a question, a combination of the thresholds is applied for the spatial averages and the spatial standard deviations to inform us about the relevance of the solution. The searching procedure for each control flap at a crank angle degree includes two steps, which will be resumed in the following.
Firstly, numerous cases of combining (n 1, n 2) are calculated or in other words for \( n_{1} = 1 \div (N_{n} - 1) \) and \( n_{2} = (n_{1} + 1) \div N_{n} \) to deduce maps of spatial averages and of spatial standard deviations. Concretely, the first case is n 1 = 1, n 2 = 2, the second case is n 1 = 1, n 2 = 3 …, the (N n − 1) th case is n 1 = 1, n 2 = N n … until the last case where n 1 = N n − 1, n 2 = N n , is applied.
In Fig. 8, the results of the mentioned maps are shown for S3 at 270-CAD. For easy understanding of the images, let us consider a point having coordinates n 1 = 200; n 2 = 600, or in other words, n 1 = 200, n 2 = 600 are applied in Eq. 13. For example, by comparing the color level at this point with the color bar of the subplot \( \overline{{S_{U} }} \), the spatial average skewness of the horizontal velocity component is roughly−0.25. Similarly, its spatial standard deviation is roughly 0.4 in the subplot rms (S U ).

Skewness (two upper rows) and flatness (two lower rows) for S3 at 270-CAD
Secondly, for each flap control position at a crank angle degree, we applied absolute thresholds of 0.25 for the spatial averages and 0.4 for the spatial standard deviations determined by Eq. 14 in order to choose pairs of (n 1; n 2) that are able to guarantee the skewness and the flatness near 0 and 3, respectively.
As depicted by Fig. 8, not only a unique value but a range of pairs (n 1; n 2) satisfy the absolute thresholds of 0.25 for the spatial averages and 0.4 for the spatial standard deviations (Eq. 14). By observing the spatial standard deviation of the overall components of skewness and flatness, narrow mode windows should be chosen to pick out the isotropic homogeneous turbulence. The average modes of the ranges are finally considered as the cutoff modes of the isotropic homogeneous turbulence and are displayed by the centers having coordinates (n 1 = C+1; n 2 = H) of the black-bordered squares in Fig. 8.
In Table 2, the cutoff modes C and H separating the mean, coherent and turbulent parts are presented. These values are different depending on the insertion depths and the crank angle degrees. By tabulating the POD eigenvalues, the coherent part contains roughly 90% of the fluctuating energy and the turbulence 10%. Therefore, this energetic distribution emphasizes that the fluctuations of the flows are mostly due to the coherent part.
For S3 at 90-CAD, 180-CAD and 270-CAD, Fig. 9 demonstrates \( \overline{{S_{{U_{1}^{\prime } }} }} \) and its spatial standard deviation as a function of n 1 by fixing n 2 = H. The filled black symbols correspond to n 1 = C + 1. The spatial average of the skewness converge to zero (typical value of isotropic homogeneous flow) when n 1 approaches C + 1. Moreover, its spatial standard deviation tends to zero confirming the existence of the isotropic homogeneous turbulence within the whole fields reconstructed by the POD modes from C + 1 to H. Similar results were found for the flatness.

Left average skewness of the horizontal velocity component. Right corresponding standard deviation (S3 at 90-CAD, 180-CAD and 270-CAD). Filled black triangles, circles and squares correspond to mean cutoff modes chosen
4.2 Impacts of the insertion amplitude of the control flap on the cycle-to-cycle variations
The benefit of the POD triple decomposition presented in the previous subsection is to discriminate each instantaneous snapshot into three parts. In Fig. 10, two instantaneous velocity fields taken at t 15 and t 150 for S3 at 180-CAD and their corresponding parts are illustrated. The mean, coherent and turbulent parts of each velocity fields are reconstructed by applying Equations 6, 7 and 8 with M = 2 and C = 319 (by referring to Table 2 for S3 at 180-CAD).

Instantaneous velocity fields at t 15 and t 150 (S3 at 180-CAD) and the corresponding mean, coherent and turbulent parts
In Fig. 10, the images at first illustrate that the mean parts of two snapshots are similar over engine cycles. There are only some minor differences between the flow fields reconstructed by the first and second modes due to extremely small deviations of the corresponding POD temporal coefficients. Another possible reason is insufficient PIV snapshots. The first two modes are not statistically equal to the first moment, but they are asymptotically the mean part. Particularly, the differences remarked are in the regions where the velocity amplitudes are extremely small or even negligible. These mean parts represent therefore the temporal average flow fields. Moreover, throughout the previous section, a high correlation between the velocity fields reconstructed by the first M POD modes can be easily observed. As a result, the cyclic variability level of the mean parts is assumed to be negligible. In regard to the turbulent part, the flow fields reconstructed by the last POD modes exhibits a chaotic behavior, but in small velocity amplitudes. Additionally, this part owns a minor percentage of the fluctuating energy (10%) and therefore would not relate substantially to the cycle-to-cycle variations of the coherent structures. In particular, the coherent part contains mainly the fluctuating energy (90%) and would be the major actor of the cycle-to-cycle variations of the large-scale motions. Consequently, it is able to evaluate the cyclic variability of the engine flows to qualify influences of three insertion depths by considering only the coherent part.
In order to compare of the coherent parts owned by S1, S2 and S3, the average standard deviation of the POD temporal coefficients included in the coherent part would be useful to estimate the cyclic variability level. This quantity is calculated by the following formula for the insertion depth S k thanks to the POD-MS at θ-CAD:
where M = 2, and C for S k at θ-CAD is shown in Table 2.
Our main target is to evaluate the cycle-to-cycle variations impacted by the positioning of the control flap. Figure 11 depicts the above quantity for three insertion amplitudes over the engine cycle from 90-CAD to 280-CAD. No phase information can be supplied by the POD-MS carried out independently at each CAD. The cyclic variability level of the insertion depth S3 observed is higher than the others whatever CAD. The effect of S2 is not clearly different comparing with that of S1 at the beginning of the intake stroke. In particular, the control flap placed at S1 has better role eliminating the cycle-to-cycle variations after the closing of the intake valves (210-CAD) until the start of the compression stroke (280-CAD). The moderate dispersion assured by S1 is highly expected and signify that the breaking process of the coherent structures are produced by the similar manner cycle by cycle. Consequently, coherent structure and induced turbulence intensity would be repetitively obtained, and the engine performance would be ameliorated.

Average standard deviations of the POD temporal coefficients included in the coherent parts corresponding to S1, S2 and S3
In order to complete the previous results, we introduce the total kinetic energy for the flap position S k at θ-CAD and at engine cycle t i and its standard deviation by the following equations. Figure 12 depicts the standard deviation of the total kinetic energy (E) for three insertion depths envisaged. This quantity is pertinent to recommend the dispersion of the flow fields from one cycle to the next and to judge the previous conclusion comparing the effects of three control flap positions.
where \( \overline{{E(S_{k} )}} \, = \, \frac{1}{{N_{t} }}\sum\nolimits_{i = 1}^{{N_{t} }} {E(S_{k} ,t_{i} )} \) is the cycle-averaged energy of the flow fields for S k at θ-CAD.

Left standard deviation of the total kinetic energy for S1, S2 and S3. Right zoom in the beginning of the compression stroke
As shown by the figures, the cyclic variability is significant at the beginning of the intake stroke due to the flapping of both upper and lower jets. After the closing of the intake valves (210-CAD), such flapping phenomena are stopped. After this event, there is no exterior effect except the upward movement of the piston to break the large-scale fluid motions. Thus, the cycle-to-cycle variations of the coherent structures after the closing of the intake valves have dominant influences on the turbulence-generating process. By zooming in the beginning of such process, the behavior of S2 is not clear and the engine flow exhibits large dispersions for S3. Meanwhile, the control flap positioned at S1 has a better impact stabilizing the engine flow and is expected to generate the turbulence intensity repeating cycle by cycle and therefore improve the engine efficiency. In other words, the control flap at S1 has a better performance in terms of cycle-to-cycle variations. These behaviors of the total kinetic energy complete the cycle-to-cycle variation analysis via POD-MS. Recently, an experimental study for three insertion amplitudes inside an SI engine with firing was carried out by Danielson Engineering, and the test results confirmed the previous conclusions.
5 Conclusions
The paper focuses on a new concept allowing in-cylinder flow control by setting a control device in the inlet pipe in order to modify the flow fields inside the combustion chamber. It is well known that a substantial reduction in consumption could be reached as the cycle-to-cycle variations are reduced to zero. Experiments in a single transparent cylinder engine in motored conditions are proposed as to start consistency of in-cylinder flow properties controlled by introducing a small control instrument and expecting non-negligible impacts.
At each CAD, all the velocity fields given by three insertion amplitudes have been concatenated using a proper orthogonal decomposition as to obtain a unique eigenfunction database. This allows, according to a velocity mean square (kinetic energy) projection, a selection of cutting mode for isolating the coherent component of the flow by extracting the mean and turbulent parts.
The POD analysis filtering indicates that the mean flow can be described by the first two POD modes according to low root mean square of the corresponding temporal coefficients as well as high correlation level of the mean part. To discriminate the coherent part of the flow, the cutoff mode choice is obtained by the evaluation of the skewness and the flatness (3rd- and 4th-centered statistical moments). After filtering the velocity field, the results indicate that the coherent part reaches roughly 90% of the fluctuating kinetic energy and the turbulence 10%. In other words, the cycle-to-cycle variations are mostly due to the coherent part.
A coefficient describing the cycle-to-cycle variations is also introduced by averaging the standard deviation of the POD temporal coefficients corresponding to the coherent part. The flow steadiness is mainly impacted by the coherent part generating the discrepancies of the large-scale structures from one cycle to the next. This coefficient permits to compare results obtained by different insertion amplitudes.
As a general conclusion, the modification of the intake pipe geometry by placing a control flap near the intake valve shows one major consequence: the cycle-to-cycle variations of the fluid structures are modified depending on the insertion of the control device. The paper defines an original approach in order to manage a better optimization of the in-cylinder flow properties by minimizing the insertion amplitude in order to avoid the dispersions over the engine cycles and especially the cycle-to-cycle variations of the coherent fluid structures and their breaking process. The method proposed is considered valuable up to the beginning of the compression stroke at roughly 280-CAD.
Abbreviations
- SI engine:
-
Spark ignition engine
- PIV:
-
Particle image velocimetry
- POD:
-
Proper orthogonal decomposition
- POD-MS:
-
Multiple snapshot POD
- IC:
-
Internal combustion
- IGR:
-
Internal gas recirculation
- EGR:
-
Exhaust gas recirculation
- CAD:
-
Crank angle degree
- ATDC or BTDC:
-
After top dead center or before top dead center
- IVO or IVC:
-
Inlet valve opening or closing
- EVO or EVC:
-
Exhaust valve opening or closing
- Nd-YAG laser:
-
Neodymium-Yttrium Aluminum Garnet laser
- CCD camera:
-
Charge Couple Device camera
- S k (K = 1…3) or S1:
-
S2, S3, insertion depths of the control flap
- X m :
-
Spatial variables corresponding to one node point
- t i :
-
Temporal variables corresponding to the ith cycle
- \( \vec{U} \) :
-
Two-dimensional PIV velocity vector
- U 1 or U 2 :
-
Horizontal or vertical component
- a (n) (S k , t i ):
-
nth POD mode for S k at cycle t i
- λ(n) :
-
Eigenvalue of the nth POD mode
- \( \Upphi_{1}^{(n)} (X_{m} ) \) or \( \Upphi_{2}^{(n)} (X_{m} ) \) :
-
Eigenvectors of mode n at X m relative to U 1 or U 2
- \( U' \) :
-
Velocity component of a homogeneous isotropic turbulent flow
- \( S_{U'} \) :
-
Skewness or 3rd-centered statistical moment of \( U' \)
- \( F_{U'} \) :
-
Flatness or 4th-centered statistical moment of \( U' \)
- E :
-
Total kinetic energy
References
Berkooz G (1991) Turbulence, coherent structures and low dimensional models. Cornell University, Ithaca, NY
Berkooz G, Holmes PJ, Lumley JL (1993) The proper orthogonal decomposition in the analysis of turbulent flows. Annu Rev Fluid Mech 25:539–575
Bizon K, Continillo G, Mancaruso E, Merola SS, Vaglieco BM (2010) POD-based analysis of combustion images in optically accessible engines. Combust Flame 157(4):632–640
Brown GL, Roshko A (1974) On density effects and large structures in turbulent mixing layers. J Fluid Mech 64:775–816
Cosadia I, Borée J, Charnay G, Dumont P (2006) Cyclic variations of the swirling flow in a diesel transparent engine. Exp Fluids 41(1):115–134
Druault P, Chaillou C (2007) Use of proper orthogonal decomposition for reconstructing the 3D in-cylinder mean-flow field from PIV data. Comptes Rendus Mécanique 335(1):42–47
Druault P, Guibert P, Alizon F (2005a) Use of proper orthogonal decomposition for time interpolation from PIV data—application to the cycle-to-cycle variation analysis of in-cylinder engine flows. Exp Fluids 39(6):1009–1023
Druault P, Delville J, Bonnet JP (2005b) Proper orthogonal decomposition of the mixing layer flow into coherent structures and turbulent Gaussian fluctuations. Comptes Rendus Mécanique 333(11):824–829
Eichenberger DA, Robert WL (1999) Effect of unsteady stretch on spark ignited flame kernel survival. Combust Flame 118(3):469–478
Enotiadis AC, Vafidis C, Whitelaw JH (1990) Interpretation of cyclic flow variations in motored internal combustion engines. Exp Fluids 10(2–3):77–86
Epureanu BI (2003) A parametric analysis of reduced order models of viscous flows in turbomachinery. J Fluids Struct 17(7):971–982
Fansler TD (1993) Turbulence production and relaxation in bowl-in-piston engines, SAE technical paper 930479
Floch A, Van Frank J, Ahmed A (1995) Comparison of the effects of intake generated swirl and tumble on turbulence characteristics in a four-valve engine. SAE Transact 104(3):2239–2255
Fogleman M, Lumley J, Rempfer D, Haworth D (2004) Application of the proper orthogonal decomposition to datasets of internal combustion engine flows. J Turbul 5:1–18
Graftieaux L, Michard M, Grosjean N (2001) Combining PIV, POD and vortex identification algorithms for the study of unsteady turbulent swirling flows. Meas Sci Technol 12(9):1422–1429
Guibert P, Le Moyne L (2002) Dual particle image velocimetry for transient flow field measurements. Exp Fluids 33(2):355–367
Han Z, Reitz RD (1995) Turbulence modeling of internal combustion engines using RNG I–I models. Combust Sci Technol 106(4–6):267–295
Heywood JB (1988) Internal combustion engine fundamental. McGraw-Hill, NY
Holmes PJ, Berkooz G, Lumley JL (1998) Turbulence, coherent structures, dynamical systems and symmetry. Cambridge University Press, Cambridge, MA
Huang RF, Yang HS, Yeh CN (2008) In-cylinder flows of a motored four-stroke engine with flat-crown and slightly concave-crown pistons. Exp Thermal Fluid Sci 32(5):1156–1167
Huang RF, Lin KH, Yeh CN, Lan J (2009) In-cylinder tumble flows and performance of a motorcycle engine with circular and elliptic intake ports. Exp Fluids 46(1):165–179
Hussain AKMF (1986) Coherent structures and turbulence. J Fluid Mech 173:303–356
Isaka Y, Higaki Y (1995) Development of Yamaha tumble induction control system (YTIS), SAE technical paper 950201
Jebamani DR, Kumar TMN (2008) Studies on variable swirl intake system for DI diesel engine using computational fluid dynamics. Thermal Sci 12(1):25–32
Kuwahara K, Ando H (2000) Diagnostics of in-cylinder flow, mixing and combustion in gasoline engine. Meas Sci Technol 11(6):95–111
Lenglet F (2006) Moteur à combustion interne avec Moyens de Giration du Fluide d’Admission, Bulletin officiel de la Propriété Industrielle, INPI, FR2909716(A1). Website: http://fr.espacenet.com
Lumley JL (1967) The structure of inhomogeneous turbulent flows. In proceedings of the international colloquium, pp 166–178
Ly HV, Tran HT (2001) Modeling and control of physical processes using POD. Math Comput Model 33(1–3):223–236
Matekunas FA (1983) Modes and measures of cyclic combustion variability. SAE Trans 92(1):1139–1156
Perret L, Collin E, Delville J (2006) Polynomial identification of POD based low-order dynamical system. J Turbul 7(17):1–15
Pinsky M, Shapiro M, Khain A, Wirzberger H (2004) A statistical model of strains in homogeneous and isotropic turbulen. Physica D-Nonlinear Phenom 191:297–313
Ravindran SS (2002) Control of flow separation over a forward-facing step by model reduction. Comput Methods Appl Mech Eng 191(41–42):4599–4617
Reeves M, Garner CP, Dent JC, Halliwell NA (1994) Particle image velocimetry measurements of Barrel Swirl in a production geometry optical IC engine, SAE technical paper 940281, pp 1–9
Reeves M, Garner CP, Dent JC, Halliwell NA (1996) Full-field ic engine flow measurement using PIV. Optical Eng 35(2):579–587
Reeves M, Towers DP, Tavender B, Buckberry CH (1999) A high-speed all-digital technique for cycle-resolved 2-D flow measurement and flow visualisation within SI engine cylinders. Optics and Lasers in Eng 31(4):247–261
Rempfer D, Fasel HF (1994) Evolution of three-dimensional coherent structures in a flat-plate boundary layer. J Fluid Mech 260:351–375
Reuss DL, Andrian RJ, Landreth CC, French DT, Fansler TD (1989) Instantaneous planar measurements of velocity and large scale vorticity and strain rate in an engine using particle image velocimetry, SAE technical paper 890616
Roudnitzky S, Druault P, Guibert P (2006) Proper orthogonal decomposition of In-cylinder engine flow into mean component, coherent structures and random Gaussian fluctuations. J Turbul 7(70):1–19
Rowley CW, Colonius T, Murray RM (2004) Model reduction for compressible flows using POD and Galerkin projection. Physica D: Nonlinear Phenom 189(1–2):115–129
Sirovich L (1987) Turbulence and dynamics of coherent structures. Q Appl Math 45(3):561–571
Stansfield P, Wigley G, Justham T, Catto J, Pitcher G (2007) PIV analysis of in-cylinder flow structures over a range of realistic engine speeds. Exp Fluids 43(1):135–146
Tabaczinski RJ (1990) Turbulent flows in reciprocating internal combustion engines. Internal combustion engine technology, Elsevier Science Publishers, Amsterdam, pp 243–285
Towers DP, Towers CE (2004) Cyclic variability measurements of in-cylinder engine flows using high speed particle image velocimetry. Meas Sci Technol 15(9):1917–1925
Utturkar Y, Zhang B, Shyy W (2005) Reduced-order description of fluid flow with moving boundaries by proper orthogonal decomposition. Int J Heat Fluid Flow 26(2):276–288
Westerweel J (1997) Fundamentals of digital particle image velocimetry. Meas Sci Technol 8(12):1379–1392
Young MB (1981) Cyclic dispersion in the HCCI engine—a literature survey, SAE technical paper 810020
Zhongchang L, Xunjun L, Zhaohe Z (2002) Reducing exhaust emissions from an automotive DI diesel engine by means of air injection variable swirl inlet system, presented at the proceedings of the IEEE international vehicle electronics conference
Acknowledgments
The authors would like to gratefully acknowledge Mr. Jérôme Bonnéty for supports on experimental study and helpful discussions during the database post-treatment. This work was performed on behalf of the PREDIT program named OPERA and supported by Danielson Engineering, PSA and the French agency ADEME.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Vu, TT., Guibert, P. Proper orthogonal decomposition analysis for cycle-to-cycle variations of engine flow. Effect of a control device in an inlet pipe. Exp Fluids 52, 1519–1532 (2012). https://doi.org/10.1007/s00348-012-1268-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00348-012-1268-6