
Abstract.
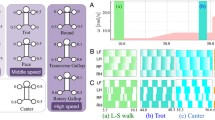
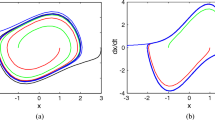
In this paper we continue the analysis of a network of symmetrically coupled cells modeling central pattern generators for quadruped locomotion proposed by Golubitsky, Stewart, Buono, and Collins. By a cell we mean a system of ordinary differential equations and by a coupled cell system we mean a network of identical cells with coupling terms. We have three main results in this paper. First, we show that the proposed network is the simplest one modeling the common quadruped gaits of walk, trot, and pace. In doing so we prove a general theorem classifying spatio-temporal symmetries of periodic solutions to equivariant systems of differential equations. We also specialize this theorem to coupled cell systems. Second, this paper focuses on primary gaits; that is, gaits that are modeled by output signals from the central pattern generator where each cell emits the same waveform along with exact phase shifts between cells. Our previous work showed that the network is capable of producing six primary gaits. Here, we show that under mild assumptions on the cells and the coupling of the network, primary gaits can be produced from Hopf bifurcation by varying only coupling strengths of the network. Third, we discuss the stability of primary gaits and exhibit these solutions by performing numerical simulations using the dimensionless Morris-Lecar equations for the cell dynamics.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Author information
Authors and Affiliations
Additional information
Received: 2 July 1999 / Revised version: 20 March 2000 /¶Published online: 16 March 2001
Rights and permissions
About this article
Cite this article
Buono, PL., Golubitsky, M. Models of central pattern generators for quadruped locomotion I. Primary gaits. J Math Biol 42, 291–326 (2001). https://doi.org/10.1007/s002850000058
Issue Date:
DOI: https://doi.org/10.1007/s002850000058