
Abstract
Despite an increased understanding of marine invasions, non-indigenous species (NIS) continue to be redistributed at both global and regional scales. Since prevention is an important element of NIS programs, monitoring vectors responsible for NIS introductions and spread, such as hull fouling, has become a priority and methods should be selected carefully to balance accuracy, time, and cost. Two common fouling assessment tools for the marine recreational boating vector were evaluated for accuracy using a traditional underwater SCUBA survey in coastal British Columbia: a dockside level of fouling assessment and a behavioral questionnaire model. Results showed that although rapid, dockside assessments did not provide an accurate assessment of fouling present below the surface, at least not in this region. In contrast, a questionnaire-based model using four easily obtained variables (boat type, age of antifouling paint, storage type, and occurrence of long distance trips) reliably identified boats carrying macrofouling species, a proxy for risk of NIS transport. Once validated, this fouling model tool could be applied in border inspection or quarantine situations where decisions must be made quickly. Further development and refinement of rapid assessment tools would improve our ability to prevent new introductions and manage spread of existing invasive species.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Prevention and management of invasive species introduction or spread is most effective at the vector transport stage (Carlton and Ruiz 2005). Hull fouling of commercial and recreational vessels is a significant vector responsible for the re-distribution of marine invasive species worldwide (Clarke Murray and others 2011; Coutts and Taylor 2004; Davidson and others 2008; Fofonoff and others 2003; Godwin 2003; Gollasch 2002; Minchin and Gollasch 2003; Wonham and Carlton 2005) and assessment of vessel biofouling risk has become a priority for many countries and government agencies (Coutts and Taylor 2004; Hayes 2003; Hayes and Hewitt 2000; Piola and Conwell 2010). To be effective in evaluating the risk of a vector and potentially stopping or limiting the influx of invasive species, early warning rapid assessment tools must not only be accurate, but also cost- and time-effective (Campbell and others 2007; Andersen and others 2004). The primary goal of these rapid assessment tools is to quickly (but accurately) identify higher risk vessels that may require more detailed examination while screening out lower risk vessels that do not require additional intervention. Higher risk vessels could be subject to detailed inspection and/or quarantine that would allow characterization of species actually present and allow removal of potential invasive species before they have an opportunity to become established.
In general, dockside evaluations are a common rapid assessment tool to assess the potential risk posed by individual vessels, both commercial and recreational (Campbell and others 2007). These surveys often are conducted from the dock alone, without accompanying underwater surveys (Cohen and others 1998; Cohen and others 2005; Lu and others 2007; Pederson and others 2005). Dockside assessments are useful for positive identification of shallow water non-indigenous species (NIS). For example, a study on non-native tunicates in Washington State suggested that dockside species surveys are similar in accuracy to assessments of the underside of floating docks, with a significant savings in resources (Grey 2009). However, dockside assessments may not capture additional fouling present in the entire three-dimensional marina environment, including pilings, vessels, and benthos.
To assess the recreational boating vector in Australia, Floerl (2002) developed a dockside rapid assessment tool, commonly referred to as the Level of Fouling (LoF) index (Table 1). This index is a rank scale of the level of hull fouling based on observations of a vessel from the dock. The tool originally was calibrated against randomly placed photographic quadrats by using a camera apparatus attached to a pole (“polecam”) and results showed that this index was highly accurate for predicting the LoF on recreational boats in Australia. During more extensive trials on international yachts in New Zealand, the LoF index correctly discriminated fouled boats from clean boats for 94% of those surveyed; with 5% false negative and 1% false positive rates (Floerl and others 2005a). This index has many advantages as a rapid assessment tool; requiring just a few minutes of observation and potentially producing high sample sizes with minimal resources as the LoF index does not require more than a single observer and is not training intensive.
Since its development, many invasive species researchers have utilized the LoF index with mixed results. It has been employed on thousands of yachts in New Zealand (Floerl and others 2005a) and surveys in San Francisco Bay using the LoF index, calibrated using depth-stratified quadrat photographs of the hull and video of stern areas, showed a moderate correlation (r = 0.742) between the index and observed fouling levels on the hulls (Davidson and others 2010). However, further research has demonstrated that in New Zealand waters at least, its accuracy seems to vary among vessel types and surfaces causing some to question its usefulness (Hopkins and Forrest 2010; Piola and Conwell 2010). Although the LoF has been employed in other regions it has not always been calibrated making further comparisons difficult. For example, Ashton and others (2006) used the index in a survey of yachts in Scotland to assess risk of macroalgal introductions but without calibration of the index’s accuracy with some form of underwater survey, its usefulness cannot be evaluated.
In contrast to LoF-type models, human behavior-based models employ characteristics of the vessel to assess the probability of transport of fouling organisms in general or specific invasive species and also have been used with mixed success (Darbyson and others 2009; Drake and Mandrak 2010; Floerl and others 2005b; Floerl and others 2008; Johnson and others 2001). In order to assess the risk posed by recreational boats, characteristics of potential interest would include travel history and frequency, cleaning practices such as antifouling paint application, speed, and duration of time out of water or between uses, as these characteristics govern accumulation of fouling. Data are collected by conducting behavioral questionnaires of vessel owners/operators and calibrated using biological surveys for the presence of live propagules or a specific invader on the vessel using some form of direct survey, either underwater or upon removal from the water.
Underwater assessments, such as SCUBA, snorkel, or Remote Operated Vehicle (ROV) surveys, are far more resource intensive than either the LoF model or behavioral model. Underwater surveys using SCUBA are highly skill dependent; requiring teams of divers often working in adverse conditions, and training and equipment costs that can be substantial. Further, most underwater assessments require additional laboratory processing and/or photographic analysis. Also, this level of assessment may introduce an undesirable time lag between survey, final results, and implementation of any potential action to combat high-risk vectors. Thus, these types of assessments cannot be considered a rapid assessment tool but are crucial for their initial calibration. Here, we utilize an underwater SCUBA survey to investigate the accuracy of the two dockside assessments (LoF and behavioral).
The most extensive testing of fouling assessment tools has been performed in southern hemisphere waters and therefore it is unknown whether LoF, behavioral, or other rapid assessment tools reliably can be applied in other regions. A previous study characterized the occurrence of hull fouling species, including the presence of NIS, for a boating population in British Columbia (BC), Canada, using dive surveys with accompanying photograph image analyses (Clarke Murray and others 2011). British Columbia is a cold temperate region with a large active boating population and a history of marine invasive species introductions rivaling other global invasion hot spots (Levings and others 2002). Macrofouling frequently was observed on vessels in this boating population (>65%) and NIS were present on one-quarter of the boats surveyed (Clarke Murray and others 2011). In order to facilitate vector management and protection of marine biodiversity, this study aimed to: (1) assess whether the surface-applied LoF rapid assessment tool provides similar results to diver-generated LoF scores and percent cover estimates, and (2) investigate whether boater behavioral characteristics can be used to predict hull fouling on recreational boats. In essence, can we accurately and quickly predict the presence of fouling below the surface of the water without getting wet?
Methods
Level of Fouling
In order to compare and calibrate rapid assessment techniques, a dive survey was conducted at 24 marinas in coastal BC, Canada (Fig. 1), during two consecutive summers (2008–2009). In the second year of sampling (2009), busy marinas with high levels of transient boater traffic were targeted specifically in order to obtain a more balanced sample of both resident and transient boats. For each dive, boats were surveyed by SCUBA sequentially along a marina finger from a random start point within each marina (10–30 boats per marina). For each boat, one diver photographed submerged surfaces by using an underwater camera with a quadrat (0.25 × 0.25 m2) attached to a standardize photograph size. Six replicate quadrats were photographed on the hull in addition to one photograph of each niche area (e.g., propeller, propeller shaft, keel, vents, knot meter, etc.). Niche or anomaly areas of the hull are three-dimensional surfaces and include the propeller, propeller shaft, keel, rudder, vents, knot meter, dry-docking support strips, and sea chest grating. Niche areas often have higher fouling levels than smooth surfaces of the hull because of variations in hydrodynamic flows and the effectiveness of antifouling paint (Clarke Murray and others 2011; Coutts and Taylor 2004; Lewis and others 2003). A second diver actively searched the entire three-dimensional surface for all hull fouling organisms (including both native and NIS) and noted the functional groups present (barnacles, mussels, macrophytes, etc.). The second diver also assigned each boat an LoF rank according to Floerl et al. (2005b) (Table 1), hereafter called the “underwater rank”. The safety diver on the dock walked the length of each boat in the dive survey and assigned an LoF rank according to the same scale, the “dockside rank”. The same individual assigned the underwater rank for all boats surveyed while the dockside observer varied (four in total). Prior to the study, all dockside observers underwent a training session where they practiced assigning LoF ranks until there was no difference in ranking of the same boats between observers.

Map of British Columbia, Canada, depicting numbered marinas surveyed (black dots) and major cities (stars). Upper right inset map shows study location within North America. Lower left inset shows close up of marinas in southern BC
Boater Behavior
In order to collect information about boater behaviors that could be useful in predicting fouling, a boater questionnaire (adapted from Floerl and others 2005a) was left with each boat examined as part of the dive survey, distributed during boating outreach events, and available online. The questionnaire consisted of three sections, asking about their boat (e.g., where it is stored, trailered, etc.), antifouling practices (e.g., paint or manual cleaning, time since last treatment, etc.), and travel history (13 questions in total) (Table 2). Boaters were asked to report their travel history for the previous 12 months including the types of trips taken and check off the places they had visited from a list of destinations. Trip types included local trips (out and back to marina in same day), weekend trips (trips of a few days duration visiting one to two different moorages), tours (long trips with multiple destinations along the way, staying in each moorage for only a few nights), and long trips (long haul travel to destinations further away, once there remain in a single moorage the entire time). The questionnaire and protocol were approved under the University of British Columbia’s Behavioural Research Ethics Board (Approval #H08-00967).
Data Analysis
A sub-sample of boats was subjected to image analysis (N = 207) with photographs analyzed using the image analysis software Image J (Sun Microsystems). Each photograph was digitally overlaid with a fixed grid of 100 points, equivalent to 18 mm spacing. Each point on the grid was assessed for fouling directly beneath to estimate total percent cover for the quadrat and record functional group or species, where possible. Niche areas were treated as two-dimensional and the same grid used to estimate percent cover, subtracting any empty space (i.e., no substrate) in the photograph. Percent cover was averaged over replicate quadrats to obtain a mean percent cover and standard error for each boat.
Dockside and underwater LoF rankings were compared using paired t-tests. Logistic regression was used to examine the relationship between dockside ranking and percent cover. To test for an observer effect, rank differences between underwater and dockside scores by observer were tested using ANOVA. Percent cover data was arc-sine square root transformed to meet model assumptions before analysis (Zar 1999). Statistical analyses were performed by using SPSS (SPSS Inc.).
Model Development
Boater behavior data were used to create a “fouling model” to predict the presence of macrofouling in which surveyed boats were classified into two groups: “fouled” or “clean”. Fouled boats were those that had any amount of macrofouling on underwater surfaces, either niche or hull areas, and correspond to an LoF rank greater than one (as determined by the diver-assigned rankings). The alternative classification was clean, where no macrofouling was present and LoF index was 1 or 0.
Discriminant function analysis was used to find a combination of variables that predicted group membership (Francis 2001). Questionnaire results were converted into 57 separate variables, either continuous (e.g., age of antifouling paint) or discrete (e.g., sailboat vs. powerboat). We used discriminant function analysis to build the fouling model from the questionnaire variables that together discriminated between the two groups for each factor (e.g., fouled vs. clean). This analysis assumes equal variance and since Box’s M statistic showed unequal variances, covariance matrices were used in model development (Francis 2001). Cross correlations between variables in the predictive model were tested using Pearson’s correlation and highly correlated (redundant) variables were removed from the model based on the lower correlation value and the analysis repeated. Model validation was performed using leave-one-out cross-validation analysis and an overall error rate calculated. The most accurate fouling model was applied to the remainder of the questionnaire dataset (questionnaires without accompanying dive surveys) and used to predict whether each boat would be fouled. Model construction and validation was performed using SPSS (SPSS Inc.).
Results
Level of Fouling
In total, 430 boats were surveyed by both dockside and underwater observers. On an individual boat basis, the dockside LoF rank was not a good predictor of hull fouling. Overall, identical rankings were assigned by the dockside and underwater observers for only 26.5% of boats surveyed. Dockside rankings were significantly different than underwater rankings (Paired samples t test, t = 2.270, df = 429, P = 0.024). The accuracy of underwater versus dockside rankings (probability of identical ranking) was highest for rankings 2 and 5 (37.31 and 33.73%, respectively; Table 3). For other ranks, the accuracy was inconsistent; for example, a dockside rank of 0 was commonly underestimated and assigned a 1 or 2 underwater (33.64 and 32.71%, respectively) while a dockside rank of 4 was commonly overestimated and assigned a 2 or 3 underwater (37.21 and 27.91%, respectively). Boats ranked 0 and 1 by the dockside observer still had a 36.44% and 64.59% chance of macrofouling being present (rank ≥ 2), respectively. Overall, the application of the LoF index had a 66.4% success rate in predicting fouling status (fouled vs. clean boats). The dockside rankings correctly predicted the presence of underwater fouling (true positive) for 78.9% and absence of fouling (true negatives) in 50.2% of boats surveyed (Table 4). False positives were relatively low (21.1%), whereas false negatives were high (49.8%) (Table 4).
Dockside ranks also were not good predictors of percent cover as measured by the underwater photograph analysis. Percent cover was highly variable compared to assigned dockside ranks (Fig. 2a). Since each LoF rank corresponds to a pre-defined level of percent cover, rank 5 should include > 41% fouling cover but the mean percent cover for dockside rank 5 was only 19.0% (ranged from 0 to 89.9%). All dockside rankings included large variation and outliers of percent cover, suggesting the dockside rank did not match the LoF percent cover definition. Macrofouling observed by the dockside observer was not included in the underwater LoF ranking in three of the surveyed boats; these boats were ranked 2 or higher by the dockside observer and yet were ranked 0 by the underwater observed. This was attributed to the presence of waterline fouling not included in underwater surveys or photographic quadrats. The underwater rank had fewer extreme and outlying values (Fig. 2b); though, the means still did not match well with percent cover definitions.

Boxplot of observed mean percent cover determined by photograph analyses versus assigned a dockside rank and b underwater rank. Horizontal lines indicate mean value, black dots are extreme values outside the 95% confidence intervals, and asterisks indicate outliers. The LoF percent cover values corresponding to the definition by Floerl and others (2005a) are shown below the figure
There was no significant observer effect; all dockside observers were equally poor at predicting underwater rankings (Kruskal Wallis χ2 P = 0.139). However, the accuracy of dockside ranking, as represented by the absolute value difference between dockside and underwater rankings, was significantly different among marinas (Kruskal-Wallis χ2 = 49.316, df = 24, P = 0.002). The worst absolute value accuracy occurred in marinas 4 (West Vancouver—1.75) and 18 (Bamfield A—1.55) and the best in marinas 23 (Prince Rupert—0.54) and 20 (Bamfield B—0.69) (Fig. 1).
Boater Behavior
In total, 616 completed questionnaires were returned, 164 of these from boats participating in the dive survey. Of 57 variables extracted from the questionnaire results, 4 were retained in the best fouling model (Discriminant function analysis: Canonical correlation coefficient 0.348, Wilks Lambda = 0.879, P < 0.001). In order of importance (with standardized canonical discriminant function coefficients in parentheses), the predictor variables were: storage location (0.628), antifouling paint age (-0.435), boat type (-0.374), and incidence of long trips taken (0.513). Essentially, this fouling model predicts that boats stored in water full time, which do not undertake long trips and have antifouling paint older than an average of 12.61 (+/- 2.41 SE) months would be more likely to have macrofouling present. Both sailboats and powerboats with these characteristics were likely to have macrofouling, but sailboats had a higher probability than powerboats of fouling (73% versus 60%). Sail and powerboats more likely to be clean of macrofouling were those with antifouling paint less than 12.61 months old, stored in water only part of the year, and had taken long trips in the past 12 months.
Model cross validation showed that the fouling model correctly predicted case classification 71.2% of the time (Table 5). Fouled boats were correctly classified 76.6% of the time (true positives) and incorrectly classified 23.4% of the time (false positives). Clean boats had a higher error rate with 40.4% incorrectly classified as fouled, indicating that the model was more likely to overestimate fouling than underestimate it. Applying the fouling model to the remainder of the questionnaire dataset (N = 329) revealed that 61.7% of surveyed boats were predicted to be fouled. This corresponds to dive survey results, where 65.7% of boats surveyed had macrofouling.
Discussion
This study demonstrated that rapid assessment tools should be chosen carefully and calibrated to ensure their usefulness, especially when it comes to making management decisions. In British Columbia, the dockside LoF assessment had low accuracy and no relationship to macrofouling estimated using either underwater SCUBA observers or photographic quadrat analysis. The dockside LoF rankings both under- and over-estimated fouling percent cover, with no consistent pattern. In contrast, the questionnaire-based fouling model was both effective in identifying fouled boats and relatively simple in its data requirements. Four variables identified by the model could be used to identify risky boats that could be subjected to a secondary underwater inspection and subsequent removal of macrofouling, if required. While both the LoF and the behavioral model were successful at correctly identifying fouled boats, the behavioral model had a much lower false negative rate, indicating it could be more appropriate as a biosecurity tool.
Level of Fouling
Environmental, social, and behavioral factors may affect the accuracy of rapid assessment tools. Spatial variation between marinas, boats, and even surfaces of individual boats may contribute to inaccuracy and inconsistency in dockside assessment tools, such as the LoF index. This study surveyed vessels at 24 different marinas which varied in the performance of LoF index. Divers observed significant thermoclines and haloclines at varying depths in the studied marinas which can make it difficult to see through the water for the whole depth of the boat and may add variability to scores among marinas. In addition to differences among marinas, the orientation of boats both to the sun and to the dock varies within marinas, as well as daily and seasonally. Usually, a dockside observer only can see one side of the boat, and growth at the surface is related to degree of shading and orientation to the sun. Macroalgae and benthic diatoms fouling at the waterline also were noted in a previous LoF study (Floerl and others 2005a) and may lead the dockside observer to overestimate the percent cover of fouling when visibility is poor. Macrophytes in particular can grow quickly on recreational boats at the level of the waterline (Mineur and others 2008), and under conditions of poor water clarity the presence of waterline fouling would only exacerbate overestimates of fouling below the surface.
In contrast, underestimation of fouling levels may occur if niche areas not visible from the surface are heavily fouled. Indeed, boats in San Francisco Bay were found to have increased fouling cover with depth (Davidson and others 2010). Underwater areas of small boats are complex with unpainted niche areas, variations in paint application, and differing hydrodynamics. Niche areas have been found to host disproportionately higher amounts of fouling on both recreational (Clarke Murray and others 2011; Davidson and others 2010) and commercial boats (Coutts 1999; Coutts and Taylor 2004; Gollasch 2002). Fouling of niche areas also may have contributed to the underestimation of fouling by the underwater LoF ranks, where in a small number of boats the diver assigned a 0 or 1 when there was some macrofouling present on the boat detected by the photographic survey. Both under- and over-estimation likely contributed to the inconsistent accuracy of the LoF index in this study. Therefore, underwater inspections should always be stratified to include hull, waterline, and niche areas, as random sampling may miss fouling hot spots and consequently incorrectly assign risk (Davidson and others 2006).
The LoF performed well in tropical Australia, where it was developed, and in extensive tests in New Zealand but did not perform well in British Columbia despite extensive operator training, suggesting that regional differences may affect its success and usefulness. Regions of higher temperature, such as the tropics, tend to have higher fouling rates in general (Minchin and others 2006) and therefore dockside observers may be better able to estimate fouling cover. All of the boats surveyed in the original LoF study had macrofouling present (Floerl 2002) and the majority of boats surveyed in San Francisco had higher levels of fouling (Davidson and others 2010). Consistent with these studies, our study showed that the tool seemed to be more accurate at assigning higher ranks when vessels had higher fouling levels. The increased accuracy at the higher ranks may result from the larger bin size of percent cover (41–100%), leaving less room for error. Since NIS transport potentially occurs at even low fouling levels this tool may not be appropriate for use in regions with lower fouling rates.
Assignation of LoF rankings is useful in dockside observation to assess the presence and quantity of macrofouling on visible surfaces of the hull (approximately the first meter, dependent on water clarity). This study showed that LoF estimates of overall percent cover in British Columbia coastal waters are imprecise and gave no indication how many additional boats had fouling present (false negatives). Without calibration, LoF studies of this type cannot conclusively assign absences and even then, and are unlikely to accurately predict fouling in unseen niche areas. In contrast, the fouling questionnaire model was slightly biased toward positive fouling predictions making it a more cautious or conservative rapid assessment tool. For invasive species detection, conservative tools are preferred as the primary goal is to maximize the likelihood of predicting or detecting invasive species when present. By increasing the chance of detecting invasive species on recreational boats, ideally before introduction to native systems, we can potentially reduce the number of successful invasions.
Behavioral Model
The four variables that comprise the fouling model namely boat type, age of antifouling paint, time in water, and history of long trips are intuitive and consistent with findings of previous studies (e.g., Ashton and others 2006; Floerl and Inglis 2005; Floerl and others 2005a). Sailboats were more likely to have macrofouling present than powerboats or fishing boats likely due to their slower transit speeds that may allow macrofouling to remain attached. In Scotland, presence of macrofouling was related to both age of antifouling paint and activity levels, where stationary boats were more heavily fouled (Ashton and others 2006). Similar to Floerl and Inglis (2005a), age of antifouling paint was an important predictor variable of fouling on British Columbia recreational boats. The average age of paint on boats surveyed in British Columbia was 15 months, while most antifouling paint brands have a manufacturer’s estimated lifetime between 9 and 18 months (Christie and Dalley 1987). The fouling model suggests that boats with paint older than 12 months were at greater risk of macrofouling and therefore the majority of British Columbia boats surveyed have ineffective antifouling paint. This result is not surprising, given the high proportion of boats observed with macrofouling present. The 12-month threshold for fouling may be region-specific and care should be exercised in extrapolating these results to regions with differing environmental conditions and boater populations.
The time in water variable indicates that the longer boats are in the water, the more likely they are to have macrofouling present. Time in water was a significant factor in species richness and community assemblage on settling plates in Northern Australia (Floerl and others 2005b), with more complex communities developing with time. In this study, boats kept in the water full time had a greater chance of macrofouling than those that were trailered or stored in water for only part of the year. This variable reflects an important division within marine boating communities: full time moorage boats versus part-time and trailered boats. While fully marine boats are at greatest risk of transporting hull fouling invasive species, trailered boats are known to transport invasive aquatic plants and mussels by entanglement on propellers or trailers (Bossenbroek and others 2007; Johnson and Padilla 1996; Johnson and others 2001; Padilla and others 1996) or larval stages or small species like spiny water flea in bilge tanks or other water holding tanks (MacIsaac and others 2004). Therefore, the risk posed by each population is very different for invasive species introduction and spread and must be evaluated and managed appropriately.
The inclusion of the “long trip” variable in the fouling model is intriguing. Though it was weakly correlated with other significant model variables, it may indicate dislodgement or reduced survival of fouling organisms on long trips. In contrast to touring trips (defined as “away from home marina for significant periods of time, with short distances between destinations”), long trips would include substantial time in the open ocean with very different environmental conditions than experienced within marinas or other coastal environments. Therefore, boats that undertake long trips may experience hydrodynamic and/or environmental conditions which reduce or prevent fouling (Coutts 1999; Coutts and others 2010; Clarke Murray and others 2012; Davidson and others 2008). The drag experienced when a boat is moving increases fouling species’ probability of dislodgement (Clarke Murray and others 2012; Davidson and others 2008). Outside sheltered marinas, new settlement also may be reduced as water velocity affects larval settlement (Havenhand and Svane 1991). In addition, long periods in the open ocean conditions with differing salinity and temperature may affect survival of fouling species. Though boats that undertake long trips were shown to have better maintenance practices in the study region (Clarke Murray and others 2011), more investigation of this variable and its relationship with fouling is warranted.
The behavioral fouling model developed was based on a single boating population and therefore its application will be most accurate when applied to British Columbia boats. Although cross validation was performed, no independent dataset was available for model validation to be carried out so it cannot be implied that the British Columbia model could reliably be extrapolated to other regions. Although similar variables have been useful in explaining fouling in other studies (Ashton and others 2006; Floerl and Inglis 2005; Floerl and others 2005a), their relative importance and, in particular, quantitative thresholds are likely to be region-specific. Testing and validation of potential models should be performed if attempting to develop similar behavioral models for other boating regions.
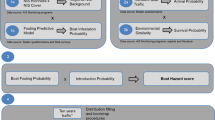
The presence of macrofouling is one component of the risk of invasive species introduction and spread (Coutts and Taylor 2004; Davidson and others 2010; Floerl and others 2005a). Boats without macrofouling pose limited risk of invasive species transport as do boats with macrofouling that do not leave their home marina. A previous study in this region showed that one-quarter of British Columbia boats were infected with one or more NIS and 11% of infected boats were frequent travelers (Clarke Murray and others 2011). Here, we modeled the probability of macrofouling; however, a similar statistical technique could be used to define a model for predicting the presence of invasive species. The development of an infection model was attempted using data from this study but there was an insufficient sample size to define a model. Whether a boat becomes infected with an NIS is a combination of its susceptibility to fouling (fouling model variables such as antifouling paint age) and proximity to populations of NIS. In order to predict infection, we would need to model travel history in combination with boater behaviors and antifouling practices, similar to recent studies (Floerl and others 2008; Johnson and others 2001).
Management Implications
Other than those in Australia and New Zealand, there are no regulations aimed at reducing invasive species transport on marine recreational boats. Though internationally traveling boats were cleaner than domestic recreational boats, they still carried small numbers of barnacles and mussels in niche areas (Clarke Murray and others 2011), suggesting that there is an ongoing possibility of additional primary introductions. This is especially true for vessels transiting from invaded areas along the Pacific coast such as San Francisco Bay where more than 234 NIS have been documented (Cohen and Carlton 1998; Ruiz and others 2011). International-origin and internationally traveling boats made up a substantial portion of the boating community in British Columbia (Clarke Murray and others 2011). The Canadian Border Services Agency (Customs) routinely inspects vehicles and passengers crossing the Canada–United States land border for known agricultural pest species but marine border crossings are subject to little physical monitoring and no mandatory vessel inspections for NIS. Vector research on freshwater, trailered boats have resulted in improved boater outreach, a voluntary code of best practices, and introduction of boat cleaning facilities in order to reduce the spread of freshwater invasive species such as zebra mussel (Dreissena polymorpha) (Bossenbroek and others 2007) and spiny water flea (Bythotrephes spp.) (MacIsaac and others 2004). In Australia, international boats are required to provide proof that hull cleaning or antifouling paint application was undertaken within the last 12 months (Floerl and Inglis 2003; Australian Quarantine and Inspection Services 2006). The application of similar regulations in Canada could reduce the risk of hull fouling invasive species entering Canadian waters.
Conclusions
Our results suggest that rapid assessment tools must be chosen carefully and thoroughly evaluated prior to implementation as their accuracy (and hence potential utility) appears to vary by region. The different methods used to assess fouling, and by extension risk of invasive species transport, tested here represent varying degrees of resource investment. As a dockside assessment, the LoF index has low expense and training requirements but was a poor predictor of macrofouling on British Columbia boats possibly due to varying environmental conditions and boater behaviors. Once verified, the behavioral fouling model was both the quickest assessment technique and proved to be effective in predicting fouling, although more testing would be required if used for NIS quarantine/management. This study showed that behavioral questionnaires, validated by underwater surveys, while initially resource intense, provide the highly detailed data required to develop effective predictive models. Behavior-based questionnaire models calibrated in this way can significantly increase accuracy and effectiveness of rapid assessments. Researchers and government agencies must carefully weigh the costs and benefits of each assessment method and conduct trials to determine the best choice for their specific region and purpose. Validated rapid assessment tools can prove efficient and effective in the ongoing battle with aquatic invasive species.
References
Andersen MC, Adams H, Hope B, Powell M (2004) Risk assessment for invasive species. Risk Anal 24(4):787–793
Ashton G, Boos K, Shucksmith R, Cook E (2006) Risk assessment of hull fouling as a vector for marine non-natives in Scotland. Aquat Invasions 1:214–218
Australian Quarantine and Inspection Services (2006) New biofouling laws to protect Australia. www.aqis.gov.au/yachts. Accessed 7 Nov. 2007
Bossenbroek JM, Johnson LE, Peters B, Lodge DM (2007) Forecasting the expansion of zebra mussels in the United States. Conserv Biol 21:800–810
Campbell ML, Gould B, Hewitt CL (2007) Survey evaluations to assess marine bioinvasions. Mar Pollut Bull 55:360–378
Carlton JT, Ruiz GM (2005) Vector science and integrated vector management in bioinvasion ecology: conceptual frameworks. In: Mooney HA, Mack RN, McNeely JA, Neville LE, Schei PJ, Waage JK (eds) Invasive alien species. Island Press, Washington, pp 36–58
Christie AO, Dalley R (1987) Barnacle fouling and its prevention. In: Southward AJ (ed) Barnacle biology. A.A. Balkema, Rotterdam, pp 419–433
Clarke Murray C, Pakhomov EA, Therriault TW (2011) Recreational boating: a large unregulated vector transporting marine invasive species. Divers Distrib 17:1161–1172
Clarke Murray C, Therriault TW, Martone PT (2012) Adapted for invasion? Evaluating attachment strength, drag and dislodgment for marine non-indigenous. Biol Invasions. 22 pp. doi:10.1007/s10530-012-0178-0
Cohen AN, Carlton JT (1998) Accelerating invasion rate in a highly invaded estuary. Science 279(5350):555–558. doi:10.1126/science.279.5350.555
Cohen A, Mills C, Berry H, Wonham M, Bingham B, Bookheim B, Carlton J, Chapman J, Cordell J, Harris L, Klinger T, Kohn A, Lambert C, Lambert G, Li K, Secord D, Toft J (1998) A rapid assessment survey of non-indigenous species in the shallow waters of Puget Sound. Washington State Department of Natural Resources United States Fish and Wildlife Service, p 37
Cohen AN, Harris LH, Bingham BL, Carlton JT, Chapman JW, Lambert CC, Lambert G, Ljubenkov JC, Murray SN, Rao LC, Reardon K, Schwindt E (2005) Rapid assessment survey for exotic organisms in southern California bays and harbors, and abundance in port and non-port areas. Biol Invasions 7:995–1002
Coutts ADM (1999) Hull fouling as a modern vector for marine biological invasions: investigation of merchant vessels visiting northern Tasmania. Thesis, Australian Maritime College. 283 pp
Coutts ADM, Taylor MD (2004) A preliminary investigation of biosecurity risks associated with biofouling on merchant vessels in New Zealand. NZ J Mar Freshw Res 38:215–229
Coutts ADM, Piola RF, Taylor MD, Hewitt CL, Gardner JPA (2010) The effect of vessel speed on the survivorship of biofouling organisms at different hull locations. Biofouling. J Bioadhesion Biofilm Res 26(5):539–553. doi:10.1080/08927014.2010.492469
Darbyson EA, Locke A, Hanson JM, Willison JHM (2009) Marine boating habits and the potential for spread of invasive species in the Gulf of St. Lawrence. Aquat Invasions 4:87–94
Davidson I, Sytsma M, Ruiz G (2006) Preliminary investigations of biofouling of ships’ hulls: non-indigenous species investigations in the Columbia River. Coast Guard Research and Development Center A602554. 75 pp
Davidson IC, McCann LD, Fofonoff PW, Systma MD, Ruiz GM (2008) The potential for hull-mediated species transfers by obsolete ships on their final voyages. Divers Distrib 14:518–529
Davidson IC, Zabin CJ, Chang AL, Brown CW, Sytsma MD, Ruiz GM (2010) Recreational boats as potential vectors of marine organisms at an invasion hotspot. Aquat Biol 11:179–191
Drake DAR, Mandrak NE (2010) Least-cost transportation networks predict spatial interaction of invasion vectors. Ecol Appl 20:2286–2299
Floerl O (2002) Intracoastal spread of fouling organisms by recreational vessels. Dissertation, James Cook University
Floerl O, Inglis GJ (2003) Potential for the introduction and spread of marine pests by private yachts In: Godwin LS (ed) Hull fouling as a mechanism for marine invasive species introductions: proceedings of a workshop on current issues and potential management strategies. February 12–13, 2003, Honolulu, Hawaii, pp 22–28
Floerl O, Inglis GJ (2005) Starting the invasion pathway: the interaction between source populations and human transport vectors. Biol Invasions 7:589
Floerl O, Inglis GJ, Hayden BJ (2005a) A risk-based predictive tool to prevent accidental introductions of nonindigenous marine species. Environ Manage 35:765–778
Floerl O, Inglis GJ, Marsh HM (2005b) Selectivity in vector management: an investigation of the effectiveness of measures used to prevent transport of non-indigenous species. Biol Invasions 7:459–475
Floerl O, Inglis GJ, Dey K, Smith A (2008) The importance of transport hubs in stepping-stone introductions. J Appl Ecol 46:37–45
Fofonoff PW, Ruiz GM, Steves B, Carlton JT (2003) In ships or on ships? Mechanisms of transfer and invasion for nonnative species to the coasts of North America. In: Ruiz GM, Carlton JT (eds) Invasive species: vectors and management strategies. Island Press, Washington, pp 152–182
Francis G (2001) Introduction to SPSS for Windows. Pearson Education Australia, Sydney
Godwin LS (2003) Hull fouling of maritime vessels as a pathway for marine species invasions to the Hawaiian Islands. Biofouling 19:123–131
Gollasch S (2002) The importance of ship hull fouling as a vector of species introductions into the North Sea. Biofouling 18:105–121
Grey EK (2009) Do we need to jump in? A comparison on two survey methods of exotic ascidians on docks. Aquat Invasions 4:81–86
Havenhand JN, Svane I (1991) Roles of hydrodynamics and larval behaviour in determining spatial aggregation in the tunicate Ciona intestinalis. Mar Ecol Prog Ser 68:271–276
Hayes KR (2003) Biosecurity and the role of risk assessment. In: Ruiz G, Carlton JT (eds) Invasive species: vectors and management strategies. Island Press, Washington, DC, pp 382–414
Hayes KR, Hewitt CL (2000) Quantitative biological risk assessment of the ballast water vector: an Australian approach. Marine bioinvasions: proceedings of a conference January 24–27, 1999. MIT Sea Grant College Program 00, pp 370–386
Hopkins GA, Forrest BM (2010) A preliminary assessment of biofouling and non-indigenous marine species associated with commercial slow-moving vessels arriving in New Zealand. Biofouling: J Bioadhesion Biofilm Res 26:613
Johnson LE, Padilla DK (1996) Geographic spread of exotic species: Ecological lessons and opportunities from the invasion of the zebra mussel Dreissena polymorpha. Biol Conserv 78:23–33
Johnson LE, Ricciardi A, Carlton JT (2001) Overland dispersal of aquatic invasive species: a risk assessment of transient recreational boats. Ecol Appl 11:1789–1799
Levings C, Kieser D, Jamieson GS, Dudas S (2002) Marine and estuarine alien species in the Strait of Georgia, British Columbia. In: Alien invaders in Canada’s waters, wetlands, and forests. Natural Resources Canada, pp 111–131
Lewis PN, Hewitt CL, Riddle M, McMinn A (2003) Marine introductions in the Southern Ocean: an unrecognized hazard to biodiversity. Mar Pollut Bull 46:213–223
Lu L, Levings CD, Piercey GE (2007) Preliminary investigation on aquatic invasive species of marine and estuarine macrobenthic invertebrates on floating structures in five British Columbia harbours. Can Manuscr Rep Fish Aquat Sci 2814. 30 pp
MacIsaac HJ, Borbely JVN, Muirhead JR, Graniero PA (2004) Backcasting and forecasting biological invasions of inland lakes. Ecol Appl 14:773–783
Minchin D, Gollasch S (2003) Fouling and ships’ hulls: how changing circumstances and spawning events may result in the spread of exotic species. Biofouling 19:111–122
Minchin D, Floerl O, Savini D, Occhipinti-Ambrogi A (2006) Small craft and the spread of exotic species. In: Davenport JL, Davenport J (eds) The ecology of transportation: managing mobility for the environment. Springer, Berlin, pp 99–118
Mineur F, Johnson MP, Maggs CA (2008) Macroalgal introductions by hull fouling on recreational vessels: seaweeds and sailors. Environ Manage 42:667–676
Padilla DK, Chotkowski MA, Buchan LA (1996) Predicting the spread of zebra mussels (Dreissena polymorpha) to inland waters using boater movement patterns. Glob Ecol Biogeogr Lett 5:353–359
Pederson J, Bullock R, Carlton J, Dijkstra J, Dobroski N, Dyrynda P, Fisher R, Harris L, Hobbs N, Lambert G, Lazo-Wasem E, Mathieson A, Miglietta M, Smith J, Smith III J, Tyrrell M (2005) Marine invaders in the northeast: Rapid assessment survey of non-native and native marine species of floating dock communities, August 2003. MIT Sea Grant College Program Publication 05-03. 40 pp
Piola RF, Conwell C (2010) Vessel biofouling as a vector for the introduction of non-indigenous marine species to New Zealand: Fishing vessels. Prepared for MAF Biosecurity New Zealand 08-10840. 57 pp
Ruiz GM, Fofonoff PW, Steves B, Foss SF, Shiba SN (2011) Marine invasion history and vector analysis of California: a hotspot for western North America. Divers Distrib 17:362–373
Wonham MJ, Carlton JT (2005) Trends in marine biological invasions at local and regional scales: the Northeast Pacific Ocean as a model system. Biol Invasions 7:369–392
Zar JH (1999) Biostatistical analysis. Prentice Hall, Inc., Upper Saddle River
Acknowledgments
The authors are grateful to the marina operators and boat owners for allowing access to their facilities and boats. We thank the following for field and lab assistance: N. Backe, F. Choi, T. Goodman, B. Hill, M. Mach, C. Simkanin, A. Stevenson, and J. Yu. We thank M. Herborg, L. Brown, and three anonymous reviewers for reviewing earlier drafts. Our thanks to the Canadian Aquatic Invasive Species Network (CAISN) for providing conference travel support. This research was funded in part by a grant from the Invasive Alien Species Partnership Program, a Government of Canada initiative, the Aquatic Invasive Species program of Fisheries & Oceans Canada and a National Science and Engineering Research Council (NSERC) Postgraduate Scholarship to CCM.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Clarke Murray, C., Therriault, T.W. & Pakhomov, E. What Lies Beneath? An Evaluation of Rapid Assessment Tools for Management of Hull Fouling. Environmental Management 52, 374–384 (2013). https://doi.org/10.1007/s00267-013-0085-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00267-013-0085-x