
Abstract
Group foraging by eusocial insects implies sophisticated recruitment processes that often result in collective decisions to exploit the most profitable sources. These advanced levels of cooperation, however, remain limited to a small range of species, and we still know little about the mechanisms underlying group foraging behaviours in the great mass of animals exhibiting lower levels of social complexity. In this paper, we report, for the first time in a gregarious insect, the cockroach Blattella germanica (L.), a collective foraging decision whereby the selection of food sources is reached without requiring active recruitment. Groups of cockroaches given a binary choice between identical food sources exhibited exploitation asymmetries whose amplitude increases with group size. By coupling behavioural observations to computer simulations, we demonstrate that selection of food sources relies uniquely on a retention effect of feeding individuals on newcomers without comparison between available opportunities. This self-organised pattern presents similarities with the foraging dynamics of eusocial species, thus stressing the generic dimension of collective decision-making mechanisms based on social amplification rules despite fundamental differences in recruitment processes. We hypothesise that such parsimony could apply to a wide range of species and help understand the emergence of collective behaviours in simple social systems.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Organisms routinely have to make decisions that are crucial for their fitness, whether this be choosing food locations, breeding sites or mating partners. When facing key decisions, we humans rarely act completely by ourselves, but usually rely on the advice of others to optimise choices (Salganik et al. 2006; Dyer et al. 2008). Like us, many animals improve their personal knowledge by gleaning social information from other members of their group (Danchin et al. 2004; Dall et al. 2005; Leadbeater and Chittka 2007) so that individuals in a group make faster and more accurate decisions than their lone conspecifics (Valone and Templeton 2002; Simons 2004).
Foraging decision making by group-living animals has traditionally been approached by game theoretic models based on economic interdependence between individual payoffs (Fretwell 1972; Giraldeau and Caraco 2000). Whilst this well-developed modelling platform focuses on the adaptive significance of individual decisions, foraging outcomes are, however, also expected to depend on underlying decision-making mechanisms whose properties cannot be understood as the simple addition of individual contributions. In recent years, increasing interest in ‘collective decisions’ has provided new insights for investigating these decision-making processes, and this has become one of the hottest topics in behavioural biology (Parrish and Edelstein-Keshet 1999; Beekman et al. 2001; Marée and Hogeweg 2001; Couzin et al. 2005; Pratt and Sumpter 2006). Collective decisions generally refer to the behaviours of groups composed of solitary decision makers able to select jointly a single option out of many other alternatives through amplification processes, leading to symmetry breaking (Deneubourg and Goss 1989; Camazine et al. 2001; Couzin and Krauze 2003; Sumpter et al. 2008; Sumpter and Pratt 2009; Sumpter 2009). Such collective dynamics can lead to a more or less greater majority selecting an option, depending on whether it results from a ‘consensus’ among group members or a ‘combined decision’ that usually affects the largest part of the group (Conradt and Roper 2005). Just as an individual’s choice emerges from complex interactions of a network of neurons, a collective decision thus emerges from an analogous network of interacting individuals (Krause et al 2007; Hölldobler and Wilson 2008; Passino et al. 2008; Marshall and Franks 2009).
To date, the most important advances concerning collective foraging decisions come no doubt from the study of eusocial insects (i.e. ants, bees, wasps and termites) that exhibit task specialisation and altruistic behaviours related to kin selection (Camazine and Sneyd 1991; Beckers et al. 1992; Nicolis and Deneubourg 1999; Sumpter and Pratt 2003). In these species, workers that discover profitable food sources convey attraction signals to their nestmates and trigger the onset of a recruitment process. The foraging behaviour of recruited individuals is then influenced by positive feedbacks enhanced by chemical or tactile signals (e.g. pheromone trail deposit, waggle dance), leading progressively to selection and collective exploitation of the most profitable food sources by the colony (Hölldobler and Wilson 1990; Seeley 1995). Sophisticated recruitment processes (i.e. ‘active’ recruitment based on signalling) involved in these self-organised behaviours are nevertheless highly specific to eusociality that occurs only in a limited fraction of the wide spectrum of animal societies (Krause and Ruxton 2002; Costa 2006). Studies investigating collective decisions by non-eusocial species are less abundant (Jeanson et al. 2004; Amé et al. 2006; Buhl et al. 2006; Gautrais et al. 2007; Ward et al. 2008), but have the fundamental advantage of providing generic rules that can apply to a wider range of species and to different selection levels without invoking complex communication or interactions. Although individuals of many non-eusocial vertebrates [e.g. sheep (Sibbald and Hooper 2004) and tadpoles (Sontag et al. 2006)] and invertebrates [e.g. bark beetles (Grégoire 1988), caterpillars (Fitzgerald 1995), ladybirds (Hemptinne et al. 2000) and treehoppers (Cocroft 2005)] are known to aggregate and to exploit food patches collectively, their underlying decision-making mechanisms are still poorly understood. A few studies nevertheless suggest that despite the absence of complex recruitment processes, group decisions in these species could rely on non-linear dynamics based on social amplification rules similar to those described in eusocial species (Deneubourg et al. 1990; Dussutour et al. 2007). From our point of view, investigating collective decision-making mechanisms and their functional consequences in non-eusocial species constitutes a promising approach to reach a better understanding of the emergence of collective patterns and cooperative behaviours in simple social systems.
In this paper, we report a collective foraging decision in the gregarious cockroach Blattella germanica (L.). Our study provides completely new insights into the social biology of these cockroaches, up to now considered as solitary foragers (Durier and Rivault 2000a, b, 2001), and describes, for the first time to our knowledge, a foraging decision-making mechanism based uniquely on a retention effect without requiring active recruitment. We investigated both the mechanisms and the functions of the collective foraging decision by coupling behavioural observations and computer simulations. First, we analysed the foraging dynamics of groups of different sizes that were given a binary choice between two identical food sources. Second, we compared the foraging performances of isolated individuals to that of focal individuals in a group. Third, we built a decision-making model based on our observations and confronted computer simulation outputs to our experimental data.
Materials and methods
Study species and experimental setup
Experimental subjects were B. germanica (L.) cockroaches from our laboratory strain. Cockroaches were reared with food and water ad libitum under controlled conditions (constant temperature 25 ± 1°C; 12-h light/12-h night photocycle). They were tested in a square glass arena (68 × 68 cm) with sides equipped with an electric barrier (12 V) to prevent them from escaping (Fig. 1a, b). The floor of the arena was covered with white paper that was renewed between each test to eliminate any possible chemical marking (Jeanson and Deneubourg 2007a). Starved cockroaches were enclosed in a dark shelter (8 × 3 cm) placed against the middle of one side of the arena, 24 h before being tested, so that they could walk freely into the arena when the test started without being stressed by CO2 anaesthesia and manipulation by the experimenter. Test individuals were presented either one or two food sources (500 mg of bread, 3 cm in diameter) large enough so that access to food was not a restricting parameter and that all individuals could feed until they were satiated. Experiments were performed during the night phase and data were recorded under red light as it is not detected by cockroaches. Each test started with the opening of the shelter. From then on, we recorded all activities of each cockroach by direct observation for 45 min. As food sources were large enough to avoid competition between feeding individuals, the proportion of cockroaches in the arena that were not feeding was the result neither of overcrowding at sources nor of food exhaustion. Time spent on a food source by an individual was a precise estimation of its feeding duration (Durier and Rivault 2000a, b). To control potential effects of genetic relatedness between tested individuals, groups were constituted of non-siblings issued from oothecae of different females (Lihoreau and Rivault 2009). All cockroaches were tested only once and had no previous experience with the arena.

Experimental setup. Behavioural experiments were performed in a square arena containing food sources and a shelter. a Two identical food sources were equidistant from the shelter opening. b One food source was placed in front of the shelter opening. Cockroaches were tested either individually or in groups (50, 100 or 200 individuals)
Group foraging dynamics
We investigated group foraging dynamics by testing cockroaches in the presence of two identical food sources (Fig. 1a). Experiments were performed with first-instar nymphs starved from hatching until being tested (4 days old) so that they had no feeding experience and were strictly all in the same physiological state. We tested groups of 50 (N = 27 replicates), 100 (N = 25 replicates) and 200 cockroaches (N = 19 replicates), thus covering ecologically realistic size and density ranges of aggregates in natural populations (Rivault 1989; Rust et al. 1995). We recorded, with scan sampling, the numbers of individuals in the shelter, exploring the arena and on each food source, at 1-min intervals. The food source that attracted the greater number of cockroaches during a test was defined as the winner source, and the source that attracted the lower number of cockroaches was defined as the loser source. Exploitation of both sources was considered asymmetrical if the numbers of cockroaches on each source, when the total number of feeding cockroaches peaked, differed significantly from a random distribution (binomial test: p < 0.05).
Individual foraging performances
We evaluated the benefits gained by an individual foraging collectively by comparing foraging performances of focal cockroaches in a group of 50 individuals (N = 78 replicates) to those of isolated cockroaches (N = 74 replicates) in the presence of a single food source (Fig. 1b). We recorded, by continuous observation, latency to leave the shelter, latency to reach the food source and the number and duration of each feeding bout at the source. Test cockroaches were marked individually with a drop of paint on their pronotum. Experiments were performed with starved sixth (last)-instar nymphs (45 days old) as they are more convenient to mark than first-instar nymphs. Preliminary experiments allowed us to validate our marking technique because comparison of foraging performances between marked and unmarked cockroaches did not reveal any significant differences in foraging behaviours (Wilcoxon test: marked N = 74; unmarked N = 40; latency to visit food: marked = 342. 67 ± 42.78 s, unmarked = 373.28 ± 36.37 s, W = 1,448.5, p = 0.854; number of feeding bouts: marked = 5.18 ± 0.56, unmarked = 5.93 ± 0.75, W = 1,566.5, p = 0.6059; feeding bout duration: marked = 211.18 ± 20.41 s, unmarked = 188.24 ± 22.74 s, W = 1,593, p = 0.5021; total feeding duration: marked = 896.58 ± 110.52 s, unmarked = 875.77 ± 128.77 s, W = 1,694.5, p = 0.2037).
Collective decision-making mechanism
We investigated the collective decision-making mechanism using computer simulations of a mathematical model based on our experimental observations (see details in “Results”). Parameters of the model were estimated from data recorded on cockroaches tested individually (N = 56 replicates) in the arena in the presence of two identical food sources (Fig. 1a). Test individuals were first-instar nymphs starved from hatching until being tested (4 days old). We recorded, with continuous observations, latencies to leave the shelter, to reach each of the two food sources and the number and duration of feeding bouts on each source (ESM Table 1).
Programming and data analysis
Data were analysed using R 2.2.1. (R Development Core Team 2007). The model was implemented in MATLAB 7.1 (The MathWorks, Natick, Massachusetts). We performed Wilcoxon tests to compare foraging performances of isolated and grouped individuals (i.e. time latencies to visit food sources, number of feeding bouts, duration of each feeding bout, total feeding durations). We used binomial tests to estimate the occurrence of asymmetrical exploitations of food sources (i.e. winner/loser) and the randomness of source choice (i.e. left/right) by groups. We used chi-square goodness-of-fit tests to compare frequencies of significant asymmetries between groups of different sizes and between experimental and theoretical data. Chi-square goodness-of-fit tests also allowed us to test the exponentiality of observed data. Means are given with standard errors.
Results
Group foraging dynamics
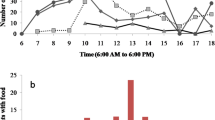
We investigated group foraging dynamics by presenting two identical food sources to different sized groups (50, 100 and 200 cockroaches) for 45 min (Fig. 1a). In all experiments, cockroaches left their shelter to explore the arena in similar proportions (approximately 55%) and with similar dynamics (Fig. 2a). However, foraging dynamics were clearly influenced by group size (Fig. 2b). Whilst numbers of feeding individuals always reached a peak after 10–20 min and then declined progressively, comparisons between the numbers of cockroaches feeding on each source when the total number of feeding cockroaches peaked, revealing asymmetries of exploitation whose level increased with group size. Proportions of significant asymmetries (binomial test: p < 0.05) increased from 0% for groups of 50 to 20% in groups of 100 and to a maximum of 42% for groups of 200 (chi-square test: χ 2 = 13.29, df = 2, p = 0.0013). For the three group sizes, the highest numbers of cockroaches on a source observed at the peak and the highest total numbers of cockroaches observed on a source during an entire test were recorded on the same source (winner source) in 90% of the tests (chi-square test: χ 2 = 3.04, df = 2, p = 0.2193). In the remaining 10% of the tests, asymmetries were never significant (binomial test: p > 0.05). The maximum proportions of cockroaches feeding on the winner source were positively correlated with group size so that asymmetries were significantly less pronounced in smaller than in larger groups (Fig. 2c). Selection of the winner source by the majority of the group was the result of a random process, independent of the left/right position of the source (binomial test: groups of 50, p = 1.0000; groups of 100, p = 0.6900; groups of 200, p = 0.6476). Foraging dynamics by cockroaches is thus a density-dependant process, leading to asymmetrical exploitation of sources by the largest groups.

Group foraging dynamics. Groups of 50 (N = 27), 100 (N = 25) and 200 (N = 19) cockroaches were given a binary choice between two identical food sources. a Proportions (%) of individuals that left the shelter in relation to time and to group size. b Numbers of individuals on the winner source (a) and on the loser source (b) in relation to time for each group size. One hundred per cent stacked columns represent the proportions of tests with symmetrical (white bars) and asymmetrical (black bars) exploitation of food sources. c Maximum proportion of individuals on the winner source in relation to group size. p: Kruskal–Wallis test
Individual foraging performance
To evaluate the benefits gained by individuals by foraging collectively, we compared the foraging dynamics of focal cockroaches within a group to those of isolated cockroaches in the presence of a single food source for 45 min (Fig. 1b). Latencies to visit the food source did not differ significantly between grouped and isolated cockroaches (Wilcoxon test: grouped 398.46 ± 43.71 s, isolated 375.14 ± 56.56 s, W = 1995, p = 0.1078), indicating that feeding cockroaches have no significant long-range attractant effect on explorers. This result is supported by the fact that latency to visit a source by focus individuals in groups is not significantly correlated to the number of conspecifics already feeding at that source (linear regression: r 2 = 0.01349, p = 0.5055). Although the numbers of feeding bouts did not differ between experimental situations (Wilcoxon test: grouped 4.95 ± 0.29, isolated 5.12 ± 0.37, W = 2,771.5, p = 0.8880), feeding bouts of grouped cockroaches lasted significantly longer than those of isolated cockroaches (Wilcoxon test: grouped 272.10 ± 21.37 s, isolated, 171.16 ± 17.49 s, W = 1,540.5, p = 0.0003). Feeding durations of newcomers increased significantly with the mean number of cockroaches already present at the source (Fig. 3), thus revealing a social facilitation for feeding where feeding individuals have a retention effect on newcomers at the source. As a consequence, total feeding durations of grouped cockroaches were greater than those of isolated cockroaches (Wilcoxon test: grouped 1,173.11 ± 72.21 s, isolated, 876.6 ± 86.78 s, W = 1,748, p = 0.0056). Under our experimental conditions, cockroaches thus foraged more efficiently when grouped than when isolated. As the distribution of latencies to visit sources and the distribution of feeding bout durations are both exponential functions (chi-square tests: latencies grouped, χ 2 = 1.90, df = 1, p = 0.1677; latencies isolated, χ 2 = 1.84, df = 1, p < 0.1748; feeding durations grouped, χ 2 = 8.82, df = 1, p = 0.1837; feeding durations isolated, χ 2 = 12.89, df = 1, p = 0.1158), the probabilities for cockroaches to join and to leave a source are independent of exploration and feeding durations.

Individual foraging performances. Cockroaches were tested either in isolation (N = 74, grey bar) or in a group (N = 78, white bars) in the presence of a single food source. Bars show the total feeding duration of focus individuals in relation to the mean number of cockroaches feeding at the source (four categories). p 1: Wilcoxon test; p 2: Kruskal–Wallis test
Collective decision-making mechanism
Based on our experimental observations, we built a mathematical model and investigated the mechanisms underlying the collective decision making by cockroaches. We thus predicted foraging dynamics at the collective level on the basis of quantifications at the individual level and compared theoretical data to our observations. In the model, choices occur through nonlinear dynamics between equal individuals without leadership or a priori knowledge of resource distribution. The dynamics of food exploitation by individuals result from shifts between four behavioural states: (1) resting in the shelter, (2) exploring the arena, (3) feeding on one of the sources and (4) being satiated (Fig. 4). The model is based on observations showing that no long-range interactions among cockroaches occur (see ‘Collective Foraging Dynamics’; see also Durier and Rivault 2000a, b; Amé et al. 2004; Jeanson et al. 2005). Neither chemical marking nor memory of shelter was taken into account because cockroaches were tested in a clean environment free of chemical traces, had no prior experience of the arena and were never observed returning to their shelter after an exploration phase (see text, ESM 1).

Flow diagram for behavioural state variables of the model. Boxes represent states, and lines connecting boxes indicate flow rate of individuals between states. Time evolution of individuals results from shifts of individuals between resting in the shelter (S), exploring the arena (E and I), feeding on one of the sources (F ij ) and being satiated in the arena (O). Arrows indicate the direction of state changes. α is the rate at which individuals waiting in the shelter become activated to search; β 1 is the rate at which they become exploiters of one of the sources for a first visit; β 2 is the rate at which they become exploiters of one of the sources for a second or subsequent visit; δ i1 is the rate at which they leave the food source i after a first visit; and δ i2 is the rate at which they leave the food source i after a second or subsequent visit. i = 1, 2. j = 1, 2
The system of differential equations describing the time evolution of individuals in the shelter in the arena and on each food source is:
where S is the number of naïve individuals resting in the shelter, E the number of naïve individuals exploring the arena before their first visit to a source, F ij the number of informed individuals feeding on food source i during visit j, I the number of informed and non-satiated individuals exploring the arena after at least one visit to a source and O the number of informed and satiated individuals in the arena after at least one visit to a source. Each individual has a probability α to leave the shelter, a probability β 1 to join a source for a first visit, a probability β 2 to join a source for a second or subsequent visit, a probability δ i1 to leave source i after a first visit and a probability δ i2 to leave source i after a second or subsequent visit. Estimations of the parameters included in the model are detailed in online appendixes (text ESM 1, ESM Fig. 1 and Table 1). Because distributions of experimental data (latencies to leave the shelter, to visit a food source and to leave a food source) are exponential functions (chi-square test: p > 0.05), probabilities α, β 1, β 2, δ i1 and δ i2 are independent of time. All the parameters that characterise source 1 and source 2 are equal.
To incorporate automatically the random aspect of the process defined in the equation system (Eqs. 1a–1f), we used stochastic simulations of the numerical model. The different steps can be summarised as follows: (1) initial conditions: All individuals are in the shelter and (2) decision process: At each time step (second), the state of each individual was checked. The decision of each individual to adopt a new state depends on the comparison between the probability to change step and a random number sampled from a uniform distribution between 0 and 1. If this value is less than, or equal to, that probability, the individual adopts a new state. Distributions of the numbers of individuals in the different states were calculated in relation to time. Like in the experiments, exploitation of sources was considered asymmetrical if the numbers of individuals on each source, when the total number of feeding individuals peaked, differed significantly from a random distribution (binomial test: p < 0.05).
Using stochastic simulations of the model, we investigated how a collective decision emerges. Under the null hypothesis, when group members forage without interacting, probabilities α, β 1, β 2, δ i1 and δ i2 are constants estimated from the behaviour of cockroaches tested individually (text ESM 1). With these fixed parameter values, simulations predict exploitation dynamics of sources that are not in good agreement with our experimental observations (Fig. 5a). Whilst theoretical proportions of significant asymmetries (binomial test: p < 0.05) fit well experimental values for groups of 50 (chi-square test: χ 2 = 0.18, df = 1, p = 0.6677), they are significantly lower for groups of 100 (chi-square test: χ 2 = 16.52, df = 1, p < 0.0001) and of 200 (chi-square test: χ 2 = 63.01, df = 1, p < 0.0001). The null hypothesis of non-interacting individuals is thus not sufficient to generate asymmetrical exploitation of food sources, meaning that the observed distribution of cockroaches is not random but results from interactions between foragers.

Comparisons between experimental data and theoretical predictions for group foraging dynamics. For the three group sizes (50, 100 and 200 individuals), the total numbers of individuals on the two sources (a), the numbers of individuals on the winner source (b) and the numbers of individuals on the loser source (c) are shown in relation to time. For each pair of experimental and theoretical curves, we calculated the coefficient of determination r 2 of the nonlinear regression. a Null hypothesis with non-interacting individuals. Groups of 50 (a: r 2 = 0.7978, p < 0.0001; b: r 2 = 0.8183, p < 0.0001; c: r 2 = 0.7770, p < 0.0001). Groups of 100 (a: r 2 = 0.9064, p < 0.001; b: r 2 = 0.8531, p < 0.0001; c: r 2 = 0.9186, p < 0.0001). Groups of 200 (a: r 2 = 0.9775, p < 0.0001; b: r 2 = 0.9281, p < 0.0001; c: r 2 = 0.9328, p < 0.0001). b Retention effect hypothesis, with interacting individuals. Groups of 50 (a: r 2 = 0.7881, p < 0.0001; b: r 2 = 0.7564, p < 0.0001; c: r 2 = 0.8106, p < 0.0001). Groups of 100 (a: r 2 = 0.9338, p < 0.001; b: r 2 = 0.8939, p < 0.0001; c: r 2 = 0.9337, p < 0.0001). Groups of 200 (a: r 2 = 0.9907, p < 0.0001; b: r 2 = 0.9902, p < 0.0001; c: r 2 = 0.9579, p < 0.0001). Simulations were run 1,000 times each. p: chi-square test
Based on observations showing that cockroaches in a group do not find food sources faster but feed longer than isolated cockroaches (Fig. 3), we included in the model a retention effect exerted by feeding individuals on newcomers. We replaced the expression of δ i1 and δ i2 by δ ij (X i ), a function of the number of individuals feeding on the food source:
Values d j , K, η and T were estimated by fitting Eq. 2 to experimental data (text ESM 1, ESM Table 1). d j + K is equal to the probability of individually tested cockroaches to leave source i at visit j. Under the hypothesis of a retention effect, the probability δ ij (X i ) to leave a source decreases when the number of individuals feeding on the source increases. α, β 1 and β 2 remain constant.
A systematic analysis of the model revealed that the introduction of a single retention effect is sufficient to generate theoretical exploitation dynamics of food sources with similar amplitudes and time windows to those observed in our experiments for the three group sizes (Fig. 5b). The best fitting data for δ ij (X i ) were obtained with d 1 = 0.0013, d 2 = 0.002, K = 0.0035 and η = 2, T = 22, which are parameter values in agreement with our experimental measures on individually foraging cockroaches (text ESM 1, ESM Table 1). The model thus predicts an increase of proportions of significant asymmetries on sources in relation to group size from 3% in groups of 50 (chi-square test: χ 2 = 0.09, df = 1, p = 0.7574) to 9% in groups of 100 (chi-square test: df = 1, χ 2 = 2.18, p = 0.1399) and 35% in groups of 200 (chi-square test: df = 1, χ 2 = 0.27, p = 0.6047), which is in accordance with our observations. The high level of congruence between experimental and theoretical data clearly shows that selection of a food source by a group results from short-range interactions between individuals that consist in a retention effect of feeding cockroaches on newcomers.
Discussion
In this study, we present evidence of a collective foraging decision by a gregarious insect. We analysed in detail the complete decision-making process and revealed, for the first time to our knowledge, a simple mechanism whereby the selection of food sources is reached through a single retention effect without requiring active recruitment. The self-organised foraging behaviour we describe highlights important similarities with the well-documented foraging dynamics of eusocial insects (Seeley 1995; Hölldobler and Wilson 1990) and evidence the generic dimension of collective decision-making mechanisms based on social amplification rules despite fundamental differences in the sophistication levels of social interactions.
The combined analysis of our experimental and theoretical data sheds completely new insights into the social biology of B. germanica and of gregarious cockroaches in general. Whilst these cockroaches are known to remain in large, stable and cohesive aggregates during their resting phase, they were until now considered to be solitary foragers, implying selfish food search based on learning the positions and quality of resources in their home range (Durier and Rivault 2000a, b, 2001). Our study reveals that foraging cockroaches use social information to select food sources, leading to a collective exploitation of a single source out of other alternatives. Undoubtedly, information transfer occurs between feeding individuals and explorers. Our experimentally validated model clearly demonstrates that cockroaches are not attracted by feeding conspecifics over a long range, but rather retained after a close contact. This suggests that feeding cockroaches recruit ‘passively’ via chemical or tactile cues directly at the food source without the necessity of active signalling through pheromonal emission or recruitment behaviour. Short-range communication reduces the probability that an individual will leave a food source, thus triggering a positive feedback that amplifies the recruitment process and leads to the formation of temporary aggregates on the selected source. This self-organised dynamic is density-dependant so that the amplitude of exploitation asymmetries reaches a maximum in large groups. Our data suggest that a minimum group size (i.e. quorum) has to be reached for the collective decision to occur (Conradt and Roper 2005; Sumpter and Pratt 2009), implying that solitary foraging is certainly the main strategy at low population densities, as evidenced by previous studies in this species (Durier and Rivault 2000a, b, 2001).
Cockroaches not only select food sources collectively but also benefit from a social facilitation for feeding by increasing their individual foraging performance, thus highlighting the adaptive value of group foraging. Longer stays at food sources were not side effects of overcrowding as size of sources strictly precluded competition in our experiments. Although the social facilitation was evidenced for sixth-instar nymphs only, the fact that this social effect explains well the group dynamics of first-instar nymphs strongly suggests that it does occur at all developmental stages. Our result reinforce the idea that group-living allow cockroaches to increase their individual fitness and strengthen previous reports evidencing the role of social dependence in maintaining group cohesion in this species (Lihoreau and Rivault 2008; Lihoreau et al. 2009). Contrary to species organised in family units, like in many eusocial insects, the basic form of cooperation we report here occurs between unrelated individuals within mixed family groups of cockroaches and consequently may not directly rely on benefits of kin selection. We suspect that in addition to prolonged feeding durations, the presence of conspecifics can provide an accurate estimate of resource quality (e.g. Boulinier and Danchin 1997) and constitute a local cue favouring aggregation around the most profitable food sources. Group foraging could also be a strategy to decrease individual predation risk through dilution effect or to reduce physical stresses such as temperature or humidity loss (Dambach and Goehlen 1999). All these types of benefits are density-dependant so that individual fitness increases when the population is asymmetrically distributed between food sources (Moody et al 1996; Amé et al 2006; Sumpter 2009). Although more investigations are needed to clarify these points, our study stresses the role of ‘ecological’ benefits of group-living (in opposition to ‘genetic’ benefits) as potential factors for the evolution of collective behaviours and the emergence of cooperation in gregarious species (Costa 2006; Korb and Heinze 2008).
Interestingly, collective decisions by gregarious cockroaches emerge both when selecting food sources, as reported here, and when selecting shelters for resting (Amé et al. 2004, 2006; Jeanson et al. 2005; Jeanson and Deneubourg 2007a, b). Similar retention effects exerted by conspecifics already present on a resource are able to trigger group formation in both contexts without the requirement of sophisticated active recruitments. Experimentally validated models developed to describe these two collective decisions reveal that animals are able to assess the quality of resources and to exploit selected sources optimally without global information or explicit comparisons of available opportunities. All individuals explore their environment randomly and select a resource in relation to the number of conspecifics already on it. The mathematical approach we used has a well-established tradition of deconstructing seemingly complex decision-making events and explaining them in terms of simple snowball processes in other systems than gregarious cockroaches. The use of agent-based models to describe collective decision-making processes was initially developed to investigate the foraging behaviour of eusocial species and provides a powerful tool to study the emergence of collective patterns based on sophisticated communication systems (Camazine and Sneyd 1991; Beckers et al. 1992; Nicolis and Deneubourg 1999; Sumpter and Pratt 2003). Whilst these models classically approximate collective decisions by their stationary states, our study demonstrates that a similar modelling approach can be relevant to investigate transient phenomena, thus providing new opportunities to describe the entire dynamics of the processes from the emergence to the extinction of the collective behaviour. More importantly, the fact that models based on similar structures and relying on similar amplification rules can be developed to investigate collective decisions in eusocial as well as in gregarious species despite important differences in recruitment processes highlights the generic aspect of self-organised decision-making mechanisms in group-living animals. The elegance of these parsimonious foraging systems is that the collective decision arises from the perception of conspecifics without the need for a leader having a synoptic overall view of the situation and knowing all the available options.
We predict that the minimal mechanism we describe, modulated by quantitative changes due to specific traits, should prove relevant to explore collective foraging strategies in a wide array of group-living species with varying levels of social complexity. Similar retention effects should also be involved in a wider range of contexts, as it has been shown for aggregation dynamics in cockroaches and recently suggested for nest selection by ants (Robinson et al. 2009). Investigating the power and limits of these decision-making processes to describe group dynamics in very different systems should greatly help further our understanding of the emergence collective behaviours and cooperation in their simplest forms.
References
Amé JM, Rivault C, Deneubourg JL (2004) Cockroach aggregation based on strain odour recognition. Anim Behav 68:793–801. doi:10.1016/j.anbehav.2004.01.009
Amé JM, Halloy J, Rivault C, Detrain C, Deneubourg JL (2006) Collegial decision making based on social amplification leads to optimal group formation. Proc Natl Acad Sci USA 103:5835–5840. doi:10.1073/pnas.0507877103
Beckers R, Deneubourg JL, Goss S (1992) Trails and U-turns in the selection of a path by the ant Lasius niger. J Theor Biol 159:397–415
Beekman M, Sumpter DJT, Ratnieks FLW (2001) Phase transition between disordered and ordered foraging in Pharaoh’s ants. Proc Natl Acad Sci USA 98:9703–9706. doi:10.1073/pnas.161285298
Boulinier T, Danchin E (1997) The use of conspecific reproductive success for breeding patch selection in territorial migratory species. Evol Ecol 11:505–517. doi:10.1007/s10682-997-1507-0
Buhl J, Sumpter DJT, Couzin ID, Hale JJ, Despland E, Miller ER, Simpson SJ (2006) From disorder to order in marching locusts. Science 312:1402–1406. doi:10.1126/science.1125142
Camazine S, Sneyd J (1991) A model of collective nectar source selection by honey bees: self-organization through simple rules. J Theor Biol 149:547–571
Camazine S, Deneubourg JL, Franks N, Sneyd J, Theraulaz G, Bonabeau E (2001) Self-organization in biological systems. Princeton University Press, Princeton
Cocroft RB (2005) Vibrational communication facilitates cooperative foraging in a phloem-feeding insect. Proc R Soc B 272:1023–1029. doi:10.1098/rspb.2004.3041
Conradt L, Roper TJ (2005) Consensus decision making in animals. Trends Ecol Evol 20:449–456. doi:10.1016/j.tree.2005.05.008
Costa JT (2006) The other insect societies. Harvard University Press, Cambridge
Couzin ID, Krause J, Franks NR, Levin S (2005) Effective leadership and decision-making in animal groups on the move. Nature 433:513–516. doi:10.1038/nature03236
Dall SRX, Giraldeau LA, Olson O, McNamara JM, Stephens DW (2005) Information and its use by animals in evolutionary ecology. Trends Ecol Evol 20:187–193. doi:10.1016/j.tree.2005.01.010
Dambach M, Goehlen B (1999) Aggregation density and longevity correlate with humidity in first instar nymphs of the cockroach Blattella germanica L. (Dictyoptera). J Insect Physiol 45:423–429. doi:10.1016/S0022-1910(98)00141-3
Danchin E, Giraldeau LA, Valone TJ, Wagner RH (2004) Public information: from noisy neighbors to cultural evolution. Science 305:487–491. doi:10.1126/science.1098254
Deneubourg JL, Goss S (1989) Collective patterns and decision-making. Ethol Ecol Evol 1:295–311
Deneubourg JL, Gregoire JC, Le Fort E (1990) Kinetics of larval gregarious behavior in the bark beetle Dendroctonus micans (Coleoptera: Scolytidae). J Insect Behav 3:169–182. doi:10.1007/BF01417910
Durier V, Rivault C (2000a) Comparisons of toxic baits for controlling the cockroach, Blattella germanica (L.): attractiveness and feeding stimulation. Med Vet Entomol 14:410–418. doi:10.1111/j.1365-2915.2000.00259.x
Durier V, Rivault C (2000b) Learning and foraging efficiency in German cockroaches, Blattella germanica (L.) (Insecta: Dictyoptera). Anim Cogn 3:139–145. doi:10.1007/s100710000065
Durier V, Rivault C (2001) Effects of spatial knowledge and feeding experience on foraging choices in German cockroaches. Anim Behav 62:681–688. doi:10.1006/anbe.2001.1807
Dussutour A, Simpson SJ, Despland E, Colasuro N (2007) When the group denies nutritional wisdom. Anim Behav 74:931–939. doi:10.1016/j.anbehav.2006.12.022
Dyer JRG, Ioannou CC, Morrell LJ, Croft DP, Couzin ID, Waters DA, Krause J (2008) Consensus decision making in human crowds. Anim Behav 75:461–470. doi:10.1016/j.anbehav.2007.05.010
Fitzgerald D (1995) The tent caterpillars. Cornell University Press, Ithaca
Fretwell SD (1972) Populations in a seasonal environment. Princeton University Press, Princeton
Gautrais J, Michelena P, Sibbald A, Bon R, Deneubourg JL (2007) Allelomimetic synchronization in Merino sheep. Anim Behav 74:1443–1454. doi:10.1016/j.anbehav.2007.02.020
Giraldeau LA, Caraco T (2000) Social foraging theory. Princeton University Press, Princeton
Grégoire JC (1988) The greater European spruce beetle. In: Berryman AA (ed) Dynamics of forest insect populations: patterns, causes, implications. Plenum, New York, pp 455–478
Hemptinne JL, Gaudin M, Dixon AFG, Lognay G (2000) Social feeding in ladybird beetles: adaptive significance and mechanism. Chemoecology 10:149–152. doi:10.1007/PL00001817
Hölldobler B, Wilson EO (1990) The ants. Harvard University Press, Cambridge
Hölldobler B, Wilson EO (2008) The superorganisms: the beauty, elegance and strangeness of insect societies. Norton, New York
Jeanson R, Deneubourg JL (2007a) Path selection in cockroaches. J Exp Biol 209:4768–4775. doi:10.1242/jeb.02562
Jeanson R, Deneubourg JL (2007b) Conspecific attraction and shelter selection in gregarious insects. Am Nat 170:47–58. doi:10.1086/518570
Jeanson R, Deneubourg JL, Theraulaz G (2004) Discrete dragline attachment induces aggregation in spiderlings of a solitary species. Anim Behav 67:531–537. doi:10.1016/j.anbehav.2003.06.013
Jeanson R, Rivault C, Deneubourg JL, Blanco S, Fournier R, Jost C, Theraulaz G (2005) Self-organized aggregation in cockroaches. Anim Behav 69:169–180. doi:10.1016/j.anbehav.2004.02.009
Korb J, Heinze J (2008) The ecology of social evolution. Springer, Berlin
Krause J, Ruxton G (2002) Living in groups. Oxford University Press, London
Krause J, Croft DP, James R (2007) Social network theory in the behavioural sciences: potential applications. Behav Ecol Sociobiol 62:15–27. doi:10.1007/s00265-007-0445-8
Leadbeater E, Chittka L (2007) Social learning in insects—from miniature brains to consensus building. Curr Biol 17:R703–R713. doi:10.1016/j.cub.2007.06.012
Lihoreau M, Rivault C (2008) Tactile stimuli triggers groups effects in cockroach aggregations. Anim Behav 75:1965–1972. doi:10.1016/j.anbehav.2007.12.006
Lihoreau M, Rivault C (2009) Kin recognition via cuticular hydrocarbons shapes cockroach social life. Behav Ecol 20:46–53. doi:10.1093/beheco/arn113
Lihoreau M, Brepson L, Rivault C (2009) The weight of the clan: even in insects, social isolation can induce a behavioural syndrome. Behav Processes 82:81–84. doi:10.1016/j.beproc.2009.03.008
Marée FM, Hogeweg P (2001) How amoeboids self-organize into a fruiting body: multicellular coordination in Dictyostelium discoideum. Proc Natl Acad Sci USA 98:3879–3883. doi:10.1073/pnas.061535198
Marshall JAR, Franks NR (2009) Colony-level cognition. Curr Biol 19:R395–R396. doi:10.1016/j.cub.2009.03.011
Moody AL, Houston AI, McNamara JM (1996) Ideal free distributions under predation risk. Behav Ecol Sociobiol 38:131–143. doi:10.1007/s002650050225
Nicolis SC, Deneubourg JL (1999) Emerging patterns and food recruitment in ants: an analytical study. J Theor Biol 4:575–592. doi:10.1006/jtbi.1999.0934
Parrish JK, Edelstein-Keshet L (1999) Complexity, pattern, and evolutionary trade-offs in animal aggregation. Science 284:99–101. doi:10.1126/science.284.5411.99
Passino KM, Seeley TD, Visscher PK (2008) Swarm cognition in honey bees. Behav Ecol Sociobiol 62:401–414. doi::10.1007/s00265-007-0468-1
Pratt SC, Sumpter DJT (2006) A tunable algorithm for collective decision-making. Proc Natl Acad Sci USA 103:15906–15910. doi:0.1073/pnas.0604801103
R Development Core Team (2007) R: A language and environment for statistical computing, R Foundation for Statistical Computing edition. R Foundation for Statistical Computing, Vienna
Rivault C (1989) Spatial distribution of the cockroach Blattella germanica in a swimming bath facility. Entomol Exp Appl 53:247–255
Robinson EJH, Smith FD, Sullivan KME, Franks NR (2009) Do ants make direct comparisons? Proc R Soc B 276:2635–2641. doi:10.1098/rspb.2009.0350
Rust MK, Owens JM, Reirson DA (1995) Understanding and controlling the German cockroach. Oxford University Press, New York
Salganik MJ, Dodds PS, Watts DJ (2006) Experimental study of inequality and unpredictability in an artificial cultural market. Science 311:854–856. doi:10.1126/science.1121066
Seeley TD (1995) The wisdom of the hive. Harvard University Press, Cambridge
Sibbald AM, Hooper RJ (2004) Sociability and the willingness of individual sheep to move away from their companions in order to graze. Appl Anim Behav Sci 86:51–62. doi:10.1016/j.applanim.2003.11.010
Simons AM (2004) Many wrongs: the advantage of group navigation. Trends Ecol Evol 19:453–455. doi:10.1016/j.tree.2004.07.001
Sontag C, Wilson DS, Wilcox S (2006) Social foraging in Bufo americanus tadpoles. Anim Behav 72:1451–1456. doi:10.1016/j.anbehav.2006.05.006
Sumpter DJT (2009) Collective animal behaviour. Princeton University Press, Princeton
Sumpter DJT, Pratt BL (2003) A modelling framework for understanding social insect foraging. Behav Ecol Sociobiol 53:131–144. doi:10.1007/s00265-002-0549-0
Sumpter DJT, Pratt BL (2009) Quorum responses and consensus decision making. Philos Trans R Soc B 364:743–753. doi:10.1098/rstb.2008.0204
Sumpter DJT, Krause J, James R, Couzin ID, Ward AJW (2008) Consensus decision-making by fish. Curr Biol 18:1773–1777. doi:10.1016/j.cub.2008.09.064
Valone TJJ, Templeton JJ (2002) Public information for the assessment of quality: a widespread social phenomenon. Philos Trans R Soc Lond B 357:1549–1557. doi:10.1098/rstb.2002.1064
Ward JW, Sumpter DJT, Couzin ID, Hart PJB, Krause J (2008) Quorum decision-making facilitates information transfer in fish shoals. Proc Natl Acad Sci USA 105:6948–6953. doi:10.1126/science.1098254
Acknowledgements
We thank C. Caillarec for having implemented the first steps of the model and F. Nassur for technical help. We are also grateful to A. Cloarec for comments on the manuscript. This work was supported by a grant from the French Ministry of Research and Education to M.L.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by M. Beekman
Electronic supplementary material
Below is the link to the electronic supplementary material.
ESM 1
(DOC 164 kb)
Rights and permissions
About this article
Cite this article
Lihoreau, M., Deneubourg, JL. & Rivault, C. Collective foraging decision in a gregarious insect. Behav Ecol Sociobiol 64, 1577–1587 (2010). https://doi.org/10.1007/s00265-010-0971-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00265-010-0971-7