
Abstract
The Charnov Marginal Value Theorem (MVT) predicts the optimal foraging duration of animals exploiting patches of resources. The predictions of this model have been verified for various animal species. However, the model is based on several assumptions that are likely too simplistic. One of these assumptions is that animals are living forever (i.e., infinite horizon). Using a simple dynamic programming model, we tested the importance of this assumption by analysing the optimal strategy for time-limited foragers. We found that, for time-limited foragers, optimal patch residence times should be greater than those predicted from the classic, static MVT, and the deviation should increase when foragers are approaching the end of their life. These predictions were verified for females of the parasitoid Anaphes victus (Hymenoptera: Mymaridae) exploiting egg patches of its host, the carrot weevil Listronotus oregonensis (Coleoptera: Curculionidae). As predicted by the model, females indeed remained for a longer time on host patches when they approached the end of their life. Experimental results were finally analysed with a Cox regression model to identify the patch-leaving decision rules females used to behave according to the model’s predictions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Most animal species exploit resources distributed in discrete patches in the environment, and natural selection should favour individuals that exploit such patchily distributed resources most efficiently. In this context, optimal foraging theory predicts that animals should optimise their patch residence time to maximize the rate at which resources are encountered and exploited (Stephens and Krebs 1986; Henneman 1998).
The most important rate maximization model that predicts the optimal time a foraging animal should remain on a patch of resources is the Marginal Value Theorem (MVT; Charnov 1976). This model considers that resources are progressively depleted by the forager so that the rate at which resources are found and exploited decreases as a function of patch residence time. In this case, the MVT predicts that each patch within a habitat should be exploited until the instantaneous rate of resource consumption falls below the average rate that can be achieved in the environment (Charnov 1976). More accurately, if P patch types of different quality can potentially be exploited by a forager in the environment, and if f (R i , t) is the monotonically increasing function describing the cumulative gain of resources while foraging on a patch of type i having an initial richness R i , then the P optimal times t i the forager should stay in each patch of type i are those satisfying the equation
where \(\overline{\tau } \) is the average travel time to find the patches to be exploited, and p i is the probability of finding a patch of type i (Bulmer 1994).
Three main predictions can be drawn from this equation: (1) foraging animals should spend more time on higher-quality patches (McNair 1982; Bonser et al. 1998; Wajnberg et al. 2000), (2) foragers should remain longer on each patch when travel time between patches increases (Charnov 1976) and (3) patches of different quality should be reduced to the same level of profitability before leaving (Cook and Hubbard 1977; Boivin et al. 2004). These three predictions have been repeatedly verified, at least qualitatively, for different animal species (Hassell 1978; Hubbard and Cook 1978; Bonser et al. 1998; Wajnberg et al. 2000; Nonacs 2001; Boivin et al. 2004; Thiel and Hoffmeister 2004).
Based on a survey across 26 different studies, however, Nonacs (2001) pointed out that in most cases, quantitative observations differed from MVT predictions. Such a discrepancy between theoretical predictions and experimental observations seems to indicate that MVT assumptions are likely too simplistic, missing important aspects of biological realism.
The MVT is based on several assumptions that are either explicit or implicit. The most important one is that animals are “omniscient”, which means that they have complete information on the quality of all patches in the habitat and on the mean time needed to reach them (Stephens and Krebs 1986; Haccou et al. 1991). Omniscient animals are unlikely to occur in nature, and several theoretical and experimental studies have relaxed this assumption by considering that animals, through a continuous sampling of patches of resources, are able to assess and learn both their profitability and inter-patch travel times (Krebs et al. 1978; Ollason 1980; McNamara and Houston 1985, 1987a; Houston 1987). As a general rule, if a sufficient number of patches are visited, models that incorporate an ability of animal to learn make predictions that are similar to those of the MVT (Ollason 1980; McNamara and Houston 1985, 1987a).
Another feature of the MVT is that it is essentially a deterministic model despite the fact that animals foraging in a natural situation must cope with stochastic events, like the time needed to find patches and patch quality (Green 1980). Adding stochasticity to models of optimal patch time allocation generates predictions that can differ from those of the MVT (Oaten 1977; McNamara 1982; Green 1984).
Although the MVT considers that the resources of the environment are not depletable (Brown 1988), it also assumes that foragers are depleting each exploited patch at a continuous rate (Iwasa et al. 1981; McNamara and Houston 1987b). Patches, however, usually contain discrete reward items. Discrete versions of the MVT were proposed (e.g., McNamara and Houston 1987b), but usually, some form of smoothing of the rewards over time is used, for example, by averaging rewards over some time interval. This leads to some technical difficulties (McNamara 1982), and the predictions can differ from the initial predictions of the MVT (Oaten 1977; McNamara 1982).
Another assumption of the MVT is that there is no competition between animals because they are supposed to forage alone in each patch (Yamamura and Tsuji 1987). In most natural habitats, however, many animals exploit resources competitively. In this case, the optimal patch residence time of each animal may depend on the patch time that others are willing to invest (van Alphen 1988; Wajnberg et al. 2004). Using game theory (Maynard Smith 1982), Sjerps and Haccou (1994) and Haccou et al. (1999) hypothesize that animals foraging simultaneously on a patch should enter a “war of attrition”. As a result, optimal patch residence time may differ from what is predicted from the MVT. Animals are also supposed to avoid any sort of mortality risks such as predation or starvation. Modelling approaches based on stochastic dynamic models that included predation and/or starvation showed that the optimal time animals should remain on patches of resources should differ from those predicted from the MVT (Newman 1991; Nonacs 2001). Finally, the MVT also assumes that animals are living during a never-ending period (i.e., infinite horizon), and, in the case of parasitoid females attacking patches of their hosts, can lay an infinite number of eggs (Yamada 1988).
In this paper, we examined, both theoretically and experimentally, the effect of relaxing the assumption that foraging animals never reach the end of their life. This might be valid for long-lived species such as mammals and birds, for which the ratio of average patch residence times to the total lifetime duration is particularly low. However, in short-lived species such as insect parasitoids, the time spent on each host patch can represent a significant portion of their total lifetime (van Alphen et al. 2003). For these species, the assumption of a never-ending life is likely to lead to wrong patch residence predictions. Dropping such an assumption implies that foraging animals like parasitoid females will visit fewer host patches over their total lifetime. In such a case, a modelling approach based on dynamic programming must be adopted (Godfray 1994). Such a dynamic model will first be presented here. As already suggested by Yamada (1988), Newman (1991) and Nonacs (2001), the predictions we obtained demonstrate that dropping the assumption of a never-ending lifetime duration leads to optimal patch residence times for time-limited foraging parasitoids that are longer than those predicted from the MVT, especially when animals are approaching the end of their life. These predictions were verified on females of Anaphes victus (Hymenoptera: Mymaridae), a parasitoid that attacks eggs of different Curculionidae species.
To understand the patch-leaving mechanisms females used to follow such optimal predictions, experimental results were also analysed with a Cox’s (1972) proportional hazards model. This led us to quantify effects of each behavioural event, such as attacking or rejecting a host, on the decision of foraging females to leave the patches they were offered, along with any potential changes in such effects while females approached the end of their life.
A dynamic programming model
Stochastic dynamic programming models are widely used in behavioural ecology to find optimal behavioural strategies, taking into account dynamically the state of the foraging animals (McNamara and Houston 1986; Houston et al. 1988; Clark and Mangel 2000). The objective is to find the optimal trajectory of the foraging animal within a state-space, leading to a maximization of its expected lifetime reproduction (Mangel 1993).
Several dynamic programming approaches have already been proposed to find optimal patch time allocation of foraging animal species. In some models, predation risk is explicitly considered (Newman 1991; Olsson and Holmgren 1998; Nonacs 2001). Others model the ability of animals to progressively learn patch quality while foraging (Mangel 1993; Olsson and Holmgren 1998; Keasar et al. 2001). Finally, some explicitly consider variation in average habitat quality (Green 1980, 1984; Roitberg et al. 1992, 1993; Tenhumberg et al. 2001) or, in the case of insect parasitoids, the ability to discriminate between healthy or parasitized hosts (Li et al. 1993; Rosenheim and Mangel 1994; Keasar et al. 2001; Tenhumberg et al. 2001). Most of these models use a state variable describing the energetic reserves of the foraging animal. Such a physiological variable is repeatedly purported as being important because it describes the survival of the animal, both within and between patches, at each time step of the model (Roitberg et al. 1992). In the model presented here, we used a simpler formulation in which the only state variable individuals have is their age (or the time they have remaining before reaching the end of their lives) (1) to have as general a predictive model as possible and (2) to study more specifically the consequences of a decreasing survival expectancy, corresponding to natural mortality, without adding any additional cost from starvation or predation at each time step.
Model description
It is assumed that the duration of the animal’s life is limited to T time steps (i.e., finite horizon). After time T, no more reproductive success is accumulated, so for a parasitoid female, T can also be viewed as the time threshold after which no more hosts can be discovered and attacked in the environment. For the sake of simplicity, we decided that the total time invested by the animal to forage corresponds to its maximal lifetime duration. Thus, during the T time steps (i.e., 0 to T−1), the animal is expected to forage randomly in an environment having an infinite number of well-defined potential patches to be exploited. These patches are considered to be of P different possible qualities. As in Eq. (1) above, p i is the probability of finding a patch of type i (with p i >0 and \({\sum {p_{i} = 1} }\)).
Before reaching a patch, the animal is assumed to have traveled a time τ j with probability D j \({\left( {{\sum {D_{j} = 1} }} \right)}.\) At each time step, the animal is also assumed to have complete information about the different values of p i and D j and also about the time remaining before reaching the time horizon (i.e., omniscient forager).
Two distributions of travel times are possible: (1) a uniform distribution with τ j =j and D j =1/T, and (2) a triangular distribution with
in which short travel times are more frequent than longer ones. This will roughly correspond to the case in which the animal is performing a random walk, looking for patches randomly distributed in the environment. The average travel time needed to find patches in these two cases are (T−1)/2 and (T−2)/3, respectively. Thus, according to the MVT (see Eq. 1), optimal patch residence times predicted by the model should be shorter with the triangular distribution than with the uniform distribution of the travel time.
Once in a patch, the parasitoid searches for and encounters hosts randomly. Following several other authors (e.g., Hubbard and Cook 1978; Bernstein et al. 1988), the number N of hosts attacked by the parasitoid female at each time step was computed using Holling’s type II functional response (disc equation, Holling 1959)
where a and T h are the host attack rate and the time spent handling each host, respectively. This equation was used iteratively to compute the fitness function on a patch of initial quality R i from the moment the female enters the patch (N 0=R i ) until the patch is left. Doing so, patch depletion was explicitly considered since attacked hosts are virtually withdrawn and cannot be subsequently attacked (i.e., no superparasitism or perfect discrimination ability with no time needed for rejection).
Using these notations, the dynamic programming equation to be solved is
where W(R,x) is the expected optimal accumulated number of offspring (i.e., fitness) the animal can produce when it enters a patch of quality R at time x. The two terms in the bracket on the right side of this equation are (1) the fitness accumulated on the patch currently exploited and (2) the optimal fitness expected during the total foraging period starting on the following visited patch, which is reached after travelling τ time steps.
This equation was solved using backward iteration with the final condition W (R i , T)=0 for all patch types. This led to compute both the optimal fitness matrix W and the optimal patch residence times for every patch type and for every time step a patch is entered, from 0 to T−1. As pointed out by Houston et al. (1997), numerical imprecision in computing solutions of dynamic programming models can, after many iterations, lead to inaccurate conclusions. To avoid such a potential source of errors, all computations were conducted with double rather than single precision (see Nonacs 2001).
Most stochastic dynamic programming models developed to determine optimal behavioural reproductive strategies are used to find stationary solutions (Clark and Mangel 2000) so that optimal strategies, far from the time horizon, become independent of both the time t and final conditions (e.g., Nonacs 2001; Roitberg et al. 1992). Here, however, since we were interested in studying explicitly the effect of decreasing survival expectancy, we modelled the behaviour of the foraging animal up to the time horizon, and the predictions when approaching T were considered.
Fixing the lifetime duration to T time steps is a rather restrictive hypothesis. We thus also extended the model by considering that the time of death of the animal was not fixed but followed a known probability density function (i.e., infinite time horizon). To do this, we used a Weibull distribution in which the probability that the animal has a survival time greater than or equal to t is \(S{\left( t \right)} = e^{{ - \lambda t^{\beta } }} \), λ being a scale parameter and β (>1) a shape parameter (Collett 1994). In this case, the fitness function while the animal is foraging on a patch is not f(R,t) anymore because it might die before, but its expectation is
, where x is the time at which the animal enters the patch. The function to be maximized over all patches visited is then \({\sum\limits_{k = 1}^\infty {h{\left( {R_{k} ,x_{k} ,t_{k} } \right)}} },\) which is incorporated into a dynamic equation similar to Eq. 4 above. Both dynamic models, with a finite time horizon and with a Weibull survival function, gave qualitatively similar results. Therefore, only predictions obtained from the model with a finite time horizon will be presented. Table 1 lists all parameters used in the model, with the value(s) used in the numerical results presented below.
Besides comparing the two inter-patch travel times distributions, we also performed a sensitivity analysis to check whether predictions were insensitive to variations in each of the parameters listed (Table 1) (Gladstein et al. 1991; Hutchinson and McNamara 2000). Results demonstrated that the model predictions were robust over a broad range of parameter values.
Using the optimal predictions of the model, we performed a Monte Carlo, forward simulation (Clark and Mangel 2000) wherein we simulated the behaviour of an animal foraging in a patchy habitat. Like in Newman (1991) and in Nonacs (2001), this was done to compare the fitness of foragers adopting either the optimal dynamic policy or the classical static MVT strategy. It also allowed us to explicitly quantify the effect of a difference in their total lifetime duration. At the beginning of each simulation (i.e., at t=0), a travel time and the quality of the patch to be exploited afterwards were both drawn randomly using the different probabilities D j and p i , respectively. The patch is then exploited during an optimal time t corresponding either to the predictions of the dynamic programming model or to the MVT (see Eq. 1) above; solved numerically using the Solver function of Microsoft Excel 2003), and the fitness of the animal is then increased by f(R,t). These steps were then repeated up to the end of the animal’s life, which lasted 50, 100, 150 or 200 time steps. All other parameters of the model remained unchanged (see Table 1). In each case, 1,000 simulations were conducted. Results were expressed in terms of total number of progeny produced per time unit, and average values were compared using standard ANOVA.
Results of the model
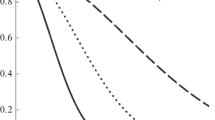
Figure 1 gives the optimal patch residence times predicted by the model for different patch qualities as a function of the time left to the forager when patches are entered. The optimal time an animal should stay on a patch discovered at the beginning of its life (i.e., when the forager still has lots of time to forage) roughly corresponds to the prediction of the MVT. However, when the time remaining to the forager upon discovering a patch decreases, the optimal residence time progressively increases until the patch should not be left anymore and the animal should die on it. This phenomenon occurs earlier on patches of better quality. As a general rule, such a phenomenon is approximately observed when the average travel time needed to find another patch becomes greater than the time left to the forager. This effect can be graphically seen by the increasing line on the left side of the graphs, indicating that the remaining foraging time should be spent on the last patch discovered.

Optimal patch residence times, predicted by the dynamic programming model, as a function of the time left to the foraging animal when patches are entered for patch qualities of 20, 60 and 100. Travel times between patches are following either a uniform (a) or a triangular (b) distribution (see text). Parameter values are those shown in Table 1. Optimal residence times on patches of qualities 40 and 80 are at intermediate values (data not shown). Predictions for the static MVT are also provided
It is interesting to note that, in agreement with the MVT, (1) average patch residence time should be greater on patches of higher quality, and (2) foragers should stay longer on patches when the average travel time is higher (Fig. 1a vs b). However, as can be seen in Fig. 2 and in contrast to what is predicted by the MVT, the model predicts that all patches should not be reduced to the same level of profitability before leaving because marginal fitness acquired will be lower if patches are entered later in the forager’s life.

Marginal fitness acquired upon leaving a patch, predicted by the dynamic programming model, as a function of the time left to the foraging animal when patches are entered for patch qualities of 20, 60 and 100. Travel times between patches are following either a uniform (a) or a triangular (b) distribution (see text). Marginal fitness is represented up to the moment the patch should not be left anymore. Parameter values are those shown in Table 1. Marginal fitness acquired on patches of qualities 40 and 80 are at intermediate values (data not shown). Marginal fitness in the case of the static MVT is also provided
Results of the forward simulation comparing the fitness acquired by a forager adopting either the optimal dynamic policy or the classical MVT strategy are presented in Fig. 3. Adopting the optimal dynamic policy results in a higher rate of fitness gained (F 1, 7,992=6.74; p=0.0094) especially when animals are short-lived. For longer-lived animals, both strategies led to identical reproductive efficiency, and such a change in the results obtained was statistically significant (interaction between “lifetime duration” and “strategy adopted”; F 3, 7,992=3.17; p=0.0233).

Average (±SE) rate of fitness acquired as a function of lifetime duration for foragers adopting either the dynamic optimal policy (white circles) or the classic MVT strategy (black circles). Results shown were obtained using Monte Carlo, forward simulations (see text) with the parameters’ values indicated in Table 1 and a triangular distribution of travel times between patches. Simulations with a uniform distribution gave similar results (data not shown). Each value is the average of 1,000 simulations
Experimental verification
Material and methods
The mymarid A. victus is a solitary egg parasitoid of several Curculionidae species, including the carrot weevil Listronotus oregonensis (LeConte) (Coleoptera: Curculionidae), in north-eastern North America (Boivin and van Baaren 2000). Females live for about 4 days and have a lifetime fecundity of 40–50 eggs (van Baaren and Boivin 1998b). There are about ten generations per year (May–October) under north-eastern North American conditions (Boivin 1999). Females can discriminate between unparasitized hosts and hosts parasitized by either themselves or by another female (van Baaren et al. 1994; van Baaren and Boivin 1998a). Listronotus oregonensis and A. victus were reared for several generations in the laboratory at 24±1°C and 18:6 h light/dark (L/D) photoperiod (Boivin 1988).
The effect of female age on patch residence time was tested using virgin and naive (i.e., without previous contact with hosts) females of different ages. Females that emerged within a 30-min period were used. Parasitoid emergence time was thus determined with an accuracy of ±15 min. Parasitoids were then kept isolated at 24±1°C and 18:6 h L/D photoperiod.
To reduce a possible effect of differences in travel time before the patch is exploited, females of different ages were first offered a square patch of nine (i.e., 3×3) healthy L. oregonensis eggs on a wet filter paper, with a distance of 4 mm between the hosts in rows and columns. Each female was observed until it left the patch and was then kept isolated for 3 h. After this waiting time, each female was offered a second identical patch. Such an experimental set-up was used to force each female to experience a “travel time” of exactly 3 h (see Thiel and Hoffmeister 2004, for a discussion on this experimental mean). The behaviour of each female on the second patch was video-recorded from the moment it entered to the moment it left the patch for more than 60 s using a camera mounted on a binocular. The female ages tested when the first patch was offered (number of replicates) were 2 (16), 24 (16), 48 (13) and 60 h (15). The experiment was conducted under laboratory conditions [22–24°C and 40–60% relative humidity (RH)]. All host eggs were 2–4 days old, the preferred developmental stage for Anaphes females (Picard et al. 1991).
During the whole observation period, the beginning and the end of the following behaviours were recorded using an event recorder with an accuracy of 0.1 s: (1) entering or (2) leaving the patch for more than 60 s, (3) antennal drumming on a host, (4) ovipositor insertion into the host, (5) oviposition, (6) antennal drumming on a host after oviposition, (7) walking between hosts and (8) resting. When a female left a host after initial antennal drumming, it was considered as an antennal host rejection. When the host was rejected after insertion of the ovipositor, it was considered as an ovipositor host rejection.
After leaving the patch, each female was isolated at 24±1°C and 18:6 L/D photoperiod to assess its life expectancy. Survival was assessed every 30 min from 0700 to 2200 hours. When death occurred during the night it was assigned to the midpoint (i.e., 0230 hours). All tested females survived until leaving the patch, although some died within a few hours.
In addition to total patch residence time, data collected were used to compute the level of patch profitability upon leaving. For this we used the method described in Boivin et al. (2004) based on the rate of encounters with hosts during the last 5 min before the female left the patch. As those hosts might have already been attacked by the female before, rates of host encounter were translated in terms of actual rates of progeny production. Computations were also performed considering the last 10 min before the female left the patch. Both results led to the same conclusions.
Patch-leaving mechanisms used by females in the different treatments were analysed with a Cox proportional hazards model (Cox 1972; Collett 1994; van Alphen et al. 2003; Wajnberg et al. 2004), which expresses the data in terms of females’ patch-leaving tendency. This statistical model enables us to quantify the effect of different covariates on such leaving tendency.
Six time-dependent covariates were used to quantify the effect of attacking or rejecting a host: the number of successful attacks, antennal or ovipositor rejections (1) of a healthy host or (2) of a host previously attacked by the female (i.e., self-superparasitism). The percentage of total life of the female that had passed when it entered the patch was also added to the model as a fixed covariate. To determine whether there was a change in the patch-leaving mechanisms with the age of the female, interactions between all time-dependent covariates and the fixed covariate were also included and tested.
Parameters were estimated from the data by means of partial likelihood maximization (Cox 1975). Significant effects of the covariates were tested using a standard likelihood ratio test. To find the most significant parameters, we used the iterative procedure described in Wajnberg et al. (1999). The adequacy of the final fitted model was assessed by making residual plots (Wajnberg et al. 1999). All computations were done in S-Plus (Venables and Ripley 1994).
Results
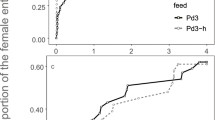
As predicted by the dynamic programming model, A. victus females spent more time on patches when they started to exploit them at a time approaching the end of their life (Fig. 4). As a consequence, the dynamic model also predicted that patches should not be reduced to the same level of profitability before leaving, but the marginal fitness should be lower for older foragers. Results shown Fig. 5 indicate that this was the case for A. victus females.

Change in patch residence times of A. victus females as a function of the percentage of their life spent when patches are entered. Spearman rank correlation=0.668 (n=60; p<0.0001). The curve corresponds to a quadratic polynomial regression fitted to the data with equation y=0.641x 2−18.84x+1,185.2 (R 2=0.451)

Average (±SE) number of progeny produced per second during the terminal 5-min period by female A. victus as a function of their life spent when patches are entered. Spearman rank correlation on all data points=−0.456 (n=60; p<0.0002)
To identify the patch-leaving mechanisms A. victus females used to remain longer in patches as they aged, a Cox regression was fitted to the experimental data. Table 2 gives the estimated effect of the covariates having a significant influence on the females’ patch-leaving tendency. As already shown in Fig. 4, an increase in the percentage of total life already spent when A. victus females entered the patch led to a significant reduction in their patch-leaving tendency (i.e., to an increase in their patch residence time). Each successful oviposition in a healthy host increased females’ patch-leaving tendency by a factor of 1.603, and each rejection of such a host after an ovipositor insertion increased it by a factor of 1.385. Similar results were obtained on the same species by Boivin et al. (2004). Thus, both of these behavioural events have a decremental influence on the time females allocated to the host patch (Driessen et al. 1995; Driessen and Bernstein 1999; van Alphen et al. 2003; Wajnberg et al. 2003). All the other time-dependent covariates tested (i.e., reattacking a host, antennal rejection of a healthy host or a host previously attacked and ovipositor rejection of a host previously attacked) did not show any significant effects (all χ 2 at p>0.05). Finally, no significant interactions were observed between the two significant time-dependent covariates and the fixed covariate describing the percentage of total life spent when the female entered a host patch (both χ 2 at p>0.05). Therefore, the patch-leaving mechanisms observed did not seem to change with the age of the females.
Discussion
As pointed out by Nonacs (2001), the MVT has served for years as a valuable heuristic tool in all studies that were developed to understand optimal patch time allocation in animals. However, discrepancies were repeatedly observed between predictions of this theoretical model and quantitative observations, and there is thus a need for more advanced modern modelling approaches, taking into account in a more realistic way the different biological parameters involved. Although several of these parameters were studied both experimentally and theoretically (e.g., see van Alphen et al. 2003 for a recent review on insect parasitoids), the effect of forager age, or more accurately the effect of the time left to a forager, especially using state-dependent models, was never considered.
Focusing on this parameter, the dynamic programming model presented in this paper can be seen as an extension of the classic, static MVT. This dynamic model, even using simple assumptions (e.g., no additional mortality risk due to predation or starvation, no learning ability, etc.), led to some predictions that are similar to those obtained from the MVT (i.e., longer patch residence times on better patches and after longer travel times). More accurately, results of the Monte Carlo, forward simulation indicate that, for short-lived animals such as most insect parasitoids, adopting a behaviour predicted by the dynamic model would lead to a higher fitness gain than behaving according to the classical, static MVT (Nonacs 2001). The difference vanishes if foragers have a long foraging time still available, as this would be the case for long-lived species. In this case, there is no difference between the static MVT and the dynamic optimal policy.
However, some predictions of the dynamic model are different from those of the MVT: optimal patch residence times should increase when foragers are approaching the end of their life, and, as a consequence, patches will not be reduced to the same level of profitability upon leaving.
Optimal patch residence times greater than what is predicted by the MVT were already obtained using dynamic programming models by Newman (1991) and Nonacs (2001) when adding a mortality risk due to predation and by Roitberg et al. (1992) when considering a mortality cost to remain on a patch. These theoretical approaches used a state variable describing the energetic reserve available to maintain the foragers’ activity. The theoretical results presented in this paper demonstrate that there is no need to add either a mortality cost or a variable describing the foragers’ energetic reserve to obtain optimal patch residence times greater than those predicted by the MVT.
The MVT is regularly used as the reference model in determining patch time strategies in simulation models analysing spatial demographic patterns of animals foraging in a patchy environment (e.g., Bernstein et al. 1988, 1991; Ward et al. 2000). All of these models simulate foraging animals that are, even sometimes drastically, time-limited. The theoretical approach developed here suggests that the MVT is not likely to be an optimal strategy for short-lived animals that should remain longer, on average, on each patch. A dynamic patch-leaving strategy would, on average, reduce the dispersal ability of animals in these models, which in turn might produce different conclusions.
The theoretical predictions of the dynamic programming model presented here seem to be verified on A. victus females attacking patches of one of their hosts, the eggs of the carrot weevil L. oregonensis. However, it must be noted that according to the model, foragers entering a patch late in their life should never leave it and should therefore die on it. This phenomenon was never observed for A. victus females. A possible explanation might be that under natural conditions, expected inter-patch travel times for this species would usually be short, with most patches being close to each other. In such a case, the probability of finding another patch before dying would be almost never zero, even for old females, leading females to almost always leave patches, as this was observed in the experiment presented in this work.
The experimental design in this paper has one confounding factor that prevents our experimental results from being viewed as a definitive verification of the theoretical predictions outlined earlier. Even if all females experienced a 3-h “travel time” before they were offered a host patch to exploit, older females might have a poorer estimate of the quality of their environment since they had to wait longer before being offered a first patch. According to the static MVT predictions, older females should therefore remain longer on the patch, which is what we observed. This is due to the fact that age and experience are correlated traits that can hardly be disentangled (Rosenheim and Rosen 1991; Fletcher et al. 1994). Theoretical approaches accounting for the ability of animals to track changes in their environment are usually based either on memory windows models, where environmental parameters are estimated over a range of most recent experiences, or linear operator models that involve a devaluation of outdated information (Giraldeau 1997). In both cases, as this was experimentally suggested by Visser et al. (1992), the most recent information is the most important one, and the past is rapidly forgotten either definitively (for memory windows models) or at an exponential rate (for linear operator models). In our experiment, even if females of different ages had different experiences at the beginning of their life, their most recent experience was the same (i.e., two host patches of the same quality with a fixed travel time in-between). Therefore, their estimate of environment quality should have been similar, and the results most likely reflect that females differed more in their ages than in their past experiences.
The theoretical approach developed in this study indicates what animals should do to behave optimally (i.e., ultimate predictions) but not how they do it, and the link between optimal behavioural reproductive strategies and the proximate mechanisms involved is usually difficult to identify (Wajnberg et al. 2000; Tenhumberg et al. 2001). Anaphes victus females are apparently following the optimal predictions of the dynamic programming model presented in this work, but what sort of patch-leaving decision rules are they using to do that? A Cox regression model revealed that each oviposition in a healthy host or each rejection of a healthy host after ovipositor inspection increases the tendency of the female to leave the patch. These two effects, already observed by Boivin et al. (2004), correspond to decremental mechanisms similar to the countdown mechanism described by Driessen et al. (1995). The decremental effect of each oviposition has been shown to lead to optimal patch residence times when all available host patches are of similar quality in the environment (van Alphen et al. 2003), which is likely to be the case for A. victus (Boivin et al. 2004). For the effect of each host rejection, the decremental mechanism is likely related to the fact that such an event informs the female about the decreasing value of the patch, and it should thus be also adaptive for the female to increase its patch-leaving tendency (van Alphen et al. 2003).
As far as females’ age is concerned, the Cox model indicated a gradual decrease in females’ patch-leaving tendency as they aged, but no significant variation in the two patch-leaving decision rules discussed so far were observed. The Waage (1979) model describing patch-leaving decision rules in insect parasitoids assumes that, upon entering a patch, females have a certain motivation level to remain that decreases over time. This motivation level corresponds to a tendency to turn sharply when the edge of the patch is reached and so reflects a tendency to remain in the patch. When no host is found, such motivation level decreases down to a threshold value, causing the animal to leave the patch. Ovipositions in hosts can cause increments (Waage 1979) or decrements (Driessen et al. 1995) in the motivation level, thus modifying female patch residence time. According to this mechanistic model, females’ age could result in either (1) an increased initial motivation level of females upon entering a patch, corresponding to a higher initial tendency to turn sharply when the edge of the patch is reached, or (2) a reduction in the decreasing rate in this motivation level during foraging time on the patch or even (3) a reduction in the threshold level causing females to leave the patch.
The theoretical model developed in this study is based on foraging parameters—like a and T h —that did not depend upon the age of the forager. It is possible, however, that older animals are less efficient in finding and exploiting resources. Experiments are now being performed to verify such a hypothesis, and the dynamic model will be modified to take such a dynamic change in foraging efficiency into account. The main objective of the present work was to consider time-limited foragers, but insect parasitoids can also be egg-limited. The model is thus currently being modified to quantify the effect of this other source of constraint on optimal patch time allocation strategy (Yamada 1988). Experiments will be performed to verify the obtained predictions.
References
Bernstein C, Kacelnik A, Krebs JR (1988) Individual decisions and the distribution of predators in a patchy environment. J Anim Ecol 57:1007–1026
Bernstein C, Kacelnik A, Krebs JR (1991) Individual decisions and the distribution of predators in a patchy environment. II. The influence of travel costs and structure of the environment. J Anim Ecol 60:205–225
Boivin G (1988) Laboratory rearing of Anaphes sordidatus (Girault) (Hymenoptera: Mymaridae) on carrot weevil eggs (Coleoptera: Curculionidae). Entomophaga 33:131–134
Boivin G (1999) Integrated management for carrot weevil. Integr Pest Manag Rev 4:21–37
Boivin G, van Baaren J (2000) The role of larval aggression and mobility in the transition between solitary and gregarious development in parasitoid wasps. Ecol Lett 3:469–474
Boivin G, Fauvergue X, Wajnberg E (2004) Optimal patch residence time in egg parasitoids: innate versus learned estimate of patch quality. Oecologia 138:640–647
Bonser B, Wright PJ, Bament S, Chukwu UO (1998) Optimal patch use by foraging workers of Lasius fuliginosus, L. niger and Myrmica ruginodis. Ecol Entomol 23:15–21
Brown JS (1988) Patch use as an indicator of habitat preference, predation risk, and competition. Behav Ecol Sociobiol 22:37–47
Bulmer M (1994) Theoretical evolutionary ecology. Sinauer Associates, Inc., Sunderland
Charnov EL (1976) Optimal foraging: the marginal value theorem. Theor Popul Biol 9:129–136
Clark CW, Mangel M (2000) Dynamic state variable models in ecology. Methods and applications. Oxford University Press, New York
Collett D (1994) Modelling survival data in medical research. Chapman & Hall, London
Cook RM, Hubbard SF (1977) Adaptive searching strategies in insect parasites. J Anim Ecol 46:115–125
Cox DR (1972) Regression models and life tables. J R Stat Soc B 74:187–220
Cox DR (1975) Partial likelihood. Biometrika 62:269–276
Driessen G, Bernstein C (1999) Patch departure mechanisms and optimal host exploitation in an insect parasitoid. J Anim Ecol 68:445–459
Driessen G, Bernstein C, van Alphen JJM, Kacelnik A (1995) A count-down mechanism for host search in the parasitoid Venturia canescens. J Anim Ecol 64:117–125
Fletcher JP, Hughes JP, Harvey IF (1994) Life expectancy and egg load affect oviposition decisions of a solitary parasitoid. Proc R Soc Lond 258:163–167
Giraldeau LA (1997) The ecology of information use. In: Krebs JR, Davies NB (eds) Behavioural ecology, 4th edn. Blackwell, Oxford, pp 42–68
Gladstein DS, Carlin NF, Austad SN (1991) The need for sensitivity analyses of dynamic optimization models. Oikos 60:121–126
Godfray HCJ (1994) Parasitoids. Behavioral and evolutionary ecology. Princeton University Press, Princeton
Green RF (1980) Bayesian birds: a simple example of Oaten’s stochastic model of optimal foraging. Theor Popul Biol 18:244–256
Green RF (1984) Stopping rules for optimal foragers. Am Nat 123:30–40
Haccou P, de Vlas SJ, van Alphen JJM, Visser ME (1991) Information processing by foragers: effects of intra-patch experience on the leaving tendency of Leptopilina heterotoma. J Anim Ecol 60:93–106
Haccou P, Sjerps M, van der Meijden E (1999) To leave or to stay, that is the question: prediction from models of patch-leaving strategies. In: Olff H, Brown VK, Drent RH (eds) Herbivores: between plants and predators. Blackwell, Oxford, pp 85–108
Hassell MP (1978) The dynamics of arthropod predator–prey systems. Princeton University Press, Princeton
Henneman ML (1998) Maximization of host encounters by parasitoids foraging in the field: females can use a simple rule. Oecologia 116:467–474
Holling CS (1959) Some characteristics of simple types of predation and parasitism. Can Entomol 91:385–398
Houston AI (1987) The control of foraging decisions. In: Commons ML, Kacelnik A, Shettleworth SJ (eds) Quantitative analysis of behavior, vol IV. Erlbaum, Mahwah, pp 41–61
Houston AI, Clark CW, McNamara JM, Mangel M (1988) Dynamic models in behavioral and evolutionary ecology. Nature 332:29–34
Houston AI, Welton NJ, McNamara JM (1997) Acquisition and maintenance costs in the long-term regulation of avian fat reserves. Oikos 78:331–340
Hubbard SF, Cook RM (1978) Optimal foraging by parasitoid wasps. J Anim Ecol 47:593–604
Hutchinson JMC, McNamara JM (2000) Ways to test stochastic dynamic programming models empirically. Anim Behav 59:665–676
Iwasa Y, Higashi M, Yamamura N (1981) Prey distribution as a factor determining the choice of optimal foraging strategy. Am Nat 117:710–723
Keasar T, Ney-Nifle M, Mangel M, Swezey S (2001) Early oviposition experience affects patch residence time in a foraging parasitoid. Entomol Exp Appl 98:123–132
Krebs JR, Kacelnik A, Taylor P (1978) Test of optimal sampling by foraging great tits. Nature 275:27–31
Li C, Roitberg BD, Mackauer M (1993) Patch residence time and parasitism of Aphelinus asychis: a simulation model. Ecol Model 69:227–241
Mangel M (1993) Motivation, learning, and motivated learning. In: Papaj DR, Lewis AC (eds) Insect learning. Ecological and evolutionary perspectives. Chapman & Hall, London, pp 158–173
Maynard Smith J (1982) Evolution and the theory of games. Cambridge University Press, Cambridge
McNair JM (1982) Optimal giving-up time and the marginal value theorem. Am Nat 119:511–529
McNamara JM (1982) Optimal patch use in a stochastic environment. Theor Popul Biol 21:269–288
McNamara JM, Houston AI (1985) Optimal foraging and learning. J Theor Biol 117:231–249
McNamara JM, Houston AI (1986) The common currency for behavioural decisions. Am Nat 127:358–378
McNamara JM, Houston AI (1987a) Memory and the efficient use of information. J Theor Biol 125:285–395
McNamara JM, Houston AI (1987b) Foraging in patches: there’s more to life than the Marginal Value Theorem. In: Commons ML, Kacelnik A, Shettleworth SJ (eds) Quantitative analysis of behavior, vol IV. Erlbaum, Mahwah, pp 23–39
Newman JA (1991) Patch use under predation hazard: foraging behavior in a simple stochastic environment. Oikos 61:29–44
Nonacs P (2001) State dependent behavior and the Marginal Value Theorem. Behav Ecol 12:71–83
Oaten A (1977) Optimal foraging in patches: a case for stochasticity. Theor Popul Biol 12:263–285
Ollason JG (1980) Learning to forage—optimally? Theor Popul Biol 18:44–56
Olsson O, Holmgren NMA (1998) The survival-rate-maximizing policy for Bayesian foragers: wait for good news. Behav Ecol 9:345–353
Picard C, Auclair JL, Boivin G (1991) Response to host age of the egg parasitoid Anaphes n.sp. (Hymenoptera: Mymaridae). Biocontrol Sci Technol 1:169–176
Roitberg BD, Mangel M, Lalonde RG, Roitberg CA, van Alphen JJM, Vet L (1992) Seasonal dynamic shifts in patch exploitation by parasitic wasps. Behav Ecol 3:156–165
Roitberg BD, Sircom J, Roitberg CA, van Alphen JJM, Mangel M (1993) Life expectancy and reproduction. Nature 364:108
Rosenheim JA, Mangel M (1994) Patch-leaving rules for parasitoids with imperfect host discrimination. Ecol Entomol 19:374–380
Rosenheim JA, Rosen D (1991) Foraging and oviposition decisions in the parasitoid Aphytis lignanensis: distinguishing the influences of egg load and experience. J Anim Ecol 60:373–389
Sjerps M, Haccou P (1994) Effect of competition on optimal patch leaving: a war of attrition. Theor Popul Biol 46:300–318
Stephens DW, Krebs JR (1986) Foraging theory. Princeton University Press, Princeton
Tenhumberg B, Keller MA, Possingham HP (2001) Using Cox’s proportional hazards models to implement optimal strategies: an example from behavioural ecology. Math Comput Model 33:597–607
Thiel A, Hoffmeister TS (2004) Knowing your habitat: linking patch-encounter rate and patch exploitation in parasitoids. Behav Ecol 15:419–425
van Alphen JJM (1988) Patch-time allocation by insect parasitoids: superparasitism and aggregation. In: de Jong G (ed) Population genetics and evolution. Springer, Berlin Heidelberg New York, pp 216–221
van Alphen JJM, Bernstein C, Driessen G (2003) Information acquisition and time allocation in insect parasitoids. Trends Ecol Evol 18:81–87
van Baaren J, Boivin G (1998a) Genotypic and kin discrimination in a solitary hymenopterous parasitoid: implications for speciation. Evol Ecol 12:523–534
van Baaren J, Boivin G (1998b) Learning affects host discrimination behavior in a parasitoid wasp. Behav Ecol Sociobiol 42:9–16
van Baaren J, Boivin G, Nénon JP (1994) Intra- and interspecific host discrimination in two closely related egg parasitoids. Oecologia 100:325–330
Venables WN, Ripley BD (1994) Modern applied statistics with S-Plus. Springer, Berlin Heidelberg New York
Visser ME, van Alphen JJM, Nell HW (1992) Adaptive superparasitism and patch time allocation in solitary parasitoids: the influence of pre-patch experience. Behav Ecol Sociobiol 31:163–171
Waage JK (1979) Foraging for patchily-distributed hosts by the parasitoid, Nemeritis canescens. J Anim Ecol 48:353–371
Wajnberg E, Rosi MC, Colazza S (1999) Genetic variation in patch-time allocation in a parasitic wasp. J Anim Ecol 68:121–133
Wajnberg E, Fauvergue X, Pons O (2000) Patch leaving decision rules and the Marginal Value Theorem: an experimental analysis and a simulation model. Behav Ecol 11:577–586
Wajnberg E, Gonsard PA, Tabone E, Curty C, Lezcano N, Colazza S (2003) A comparative analysis of patch-leaving decision rules in a parasitoid family. J Anim Ecol 72:618–626
Wajnberg E, Curty C, Colazza S (2004) Genetic variation in the mechanisms of direct mutual interference in a parasitic wasp: consequences in terms of patch-time allocation. J Anim Ecol 73:1179–1189
Ward JF, Austin RM, MacDonald DW (2000) A simulation model of foraging behaviour and the effect of predation risk. J Anim Ecol 69:16–30
Yamada Y (1988) Optimal use of patches by parasitoids with a limited fecundity. Res Popul Ecol 30:235–249
Yamamura N, Tsuji N (1987) Optimal patch time under exploitative competition. Am Nat 129:553–567
Acknowledgements
This work was supported in part by research grants from the Natural Sciences and Engineering Research Council (NSERC) to G. Boivin. J. Vaillancourt is thanked for her technical assistance. T.S. Hoffmeister, R.H. Messing, E. Mondor, P. Nonacs, J.S. Pierre and B.D. Roitberg are thanked for their comments on an earlier version of the manuscript. This work is part of GDR 2155 ‘Ecologie Comportementale’ [Centre National de la Recherche Scientifique (CNRS) commission 29] and the European Science Foundation (ESF)/Behavioural Ecology of Insect Parasitoids (BEPAR) scientific programme. All the experimental procedures conformed to French and Canadian law.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by H. Kokko
Rights and permissions
About this article
Cite this article
Wajnberg, E., Bernhard, P., Hamelin, F. et al. Optimal patch time allocation for time-limited foragers. Behav Ecol Sociobiol 60, 1–10 (2006). https://doi.org/10.1007/s00265-005-0131-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00265-005-0131-7