
Abstract
The Taylor spatial frame uses the slow correction principles of the Ilizarov system but adds a six-axis deformity analysis incorporated within a computer program. To evaluate its use in our community, we used it in lengthening and deformity correction of the lower limbs to treat 22 cases from 1999 to 2001. There were 14 females and eight males (average age 16.5 years). Our target was lengthening in eight cases, correction of deformities in eight and both in six. The results were excellent in 18 cases, good in two, and fair in two. Despite the cost, patient profile and a steep learning curve, our results were encouraging but less favorable than with the Ilizarov external fixator.
Résumé
Le Cadre Spatial de Taylor utilise les principes de la correction progressive du système Ilizarov mais ajoute une analyse de la difformité selon six axes, incorporée dans un programme informatique. Pour évaluer son usage nous l’avons utilisé dans notre institution, dans 22 cas, de 99 à 2001 pour allonger et corriger des déformations des membres inférieurs. Il y avait 14 femmes et 8 hommes (âge moyen 16.5 années). Notre but était l› allongement dans 8 cas, la correction de difformités dans 8 cas, et les deux dans 6 cas. Les résultats étaient excellents dans 18 cas, bon dans 2, et juste dans 2. En dépit du coût, du profil des patients, et de la courbe d’apprentissage, nos résultats étaient encourageant, mais moins favorables qu’avec le fixateur externe d’Ilizarov.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The Ilizarov external fixator (IEF) has several distinct advantages over other surgical techniques in the treatment of bone loss, nonunions and deformities of the lower limb[1]. It uses hinges and translation mechanisms that are specifically selected for each clinical problem, and it requires sequential correction for multiaxial deformities [22]. In addition the use of hinges together with independent lengthening, translation and rotation mechanisms sequentially or simultaneously are very time consuming [21]. In contrast, Taylor considers that the multiple angles and translations of a particular deformity can be managed simultaneously using the Taylor spatial frame (TSF), which is a circular external fixator that relies on the use of a computer software program [20].
The aim of our study was to assess in our specific environs the value of the TSF in lengthening and in deformity correction of the lower limbs.
Material and methods
Between 1999 and 2001, we treated 22 patients using the TSF. There were 14 females and eight males and their mean age was 16.5 (range: 6–42) years. The aetiology was four examples of tibia vara, two genu valgum, three congenital short femurs, two equinus feet, five short tibiae, five short and deformed tibiae following trauma and one posttraumatic short femur.
Technique
Measurements were made both clinically and from anteroposterior and lateral “standing” radiographs using the Paley’s technique [9]. We measured six deformity parameters on the radiographs and three frame parameters from the clinical examination. We also recorded four mounting parameters. These 13 parameters were loaded into the Chronic Deformity Correction Program, which then returns six specific strut lengths, which allows adjustment of the fixator to mimic the deformity exactly. It is important that both the orthopaedic surgeon and the patient follow the “print-out schedule” carefully for turning and adjusting the controls on the struts. This will result in full correction of the deformity when the struts have been restored to their neutral lengths.
Patients were discharged when they were able to manage the technique and could bear weight with an appropriate walking aid. They had also learned by then how to take care of the pins. Patients were reviewed weekly for 1 month then every 2 weeks, and radiographs were taken at appropriate intervals. The frame was dynamized for 2 weeks when “tricortical” consolidation was seen on anteroposterior and lateral radiographs, and it was then removed. If deformity remained after the proximal and distal rings were parallel, a further correction was started using a second “print out” of the residual program.
Results
The mean number of operations before the application of the spatial frame was 2.6 (range: 1–6). The operative time ranged from 1.5 to 3 h and the period in the spatial frame was between 2 to 9 (average 5.27) months. The mean follow-up was 3.2 (range: 2.5–4.5) years. The aim of treatment (target) was lengthening in eight patients, correction of deformities in eight and both in six (Table 1). This last group resulted from a fracture of the femur in one patient and of the tibia in five (two of these were associated with an infected nonunion).
A multifactor objective grading system was developed using a modification of that devised by Tucker [23]. The results were rated as excellent if the target was completely achieved and if the following criteria were met: full knee extension, knee flexion greater than 125°, dorsal flexion of the ankle above neutral with plantar flexion of more than 30°, leg-length discrepancy of less than 1 cm, angulation of less than 5°, rotation of less than 15°, and no infection. If the target was achieved with one criteria missing, the result was rated as good. Incomplete achievement of the target with one criteria missing was rated as fair and all others were rated as poor. Our results were 18 excellent, two good and two fair. One patient was unable to complete the entire procedure. Mean lengthening was 5 (range: 3.5–8) cm. Mean healing index was 42 (range: 33–48) days/cm. Bifocal lengthening was performed in two patients.
Pin tract inflammation occurred in all our patients and 12 of these infections required antibiotics. There was loosening of three frames and this had been treated by debridement, addition or replacement of wires. Early consolidation occurred in three patients and adjustment under general anesthesia was necessary in six in order to maintain stability and to allow repeat corticotomy. Fracture of the regenerated bone occurred in two patients due to premature frame removal. One patient developed deep vein thrombosis. Two patients required a “second attempt,” but this failed in one.
Discussion
For severe long-bone deformity, the Ilizarov technique uses distraction rods with hinges and includes other mechanical joints in order to permit gradual reciprocal angulation or rotation of the rings [6]. These hinges and translation mechanisms are specifically oriented for each deformity and this means that the surgeon must design a new frame for the treatment of each patient, which requires time and expertise. Treatment with conventional frames needs a patient-customized frame mounting but this demanding procedure is markedly reduced when using the hexapod principle of robotic technique as invented for the Ilizarov apparatus (i.e., the TSF) [12].
Management of malunion and nonunion of the tibia is often a major challenge. The goal is to correct any axial or rotational malalignment, equalize limb lengths, prevent or treat infection and encourage functional restoration of the limb [14]. Rozbruch [13] reported two patients with hypertrophic tibial nonunion associated with deformity for which distraction treatment was performed using an Ilizarov/TSF. Sluga [18] treated five children with the TSF, four of whom had shortened and deformed femurs after either a fracture or osteomyelitis or had been born with a congenital short femur; and one patient had a tibial pseudarthrosis. Mean corrected leg lengthening was 5.9 (1.7–7.2) cm. In all these children, the bones “healed” without major complications. Feldman [4] tested the effectiveness of six-axis analysis deformity correction using the TSF in the treatment of 11 tibial malunions and seven tibial nonunions. Seventeen achieved union and significant correction of deformities. The average length of time spent in the frame was 18.5 (12–32) weeks. In the current study, we corrected an average of 15.6° (0–22) of sagittal angulation, 7.8 mm (2–16) of lateral translation and 11° of rotation. In five of six patients with a post-traumatic problem, we achieved excellent results. In the last patient treated, the tibia healed with angulation and a leg-length discrepancy of more than 1 cm but the outcome was complicated with knee stiffness. This result was rated as fair.
Correction of residual deformity is difficult using the Ilizarov system as in order to correct residual translational and/or rotational deformities, it is necessary to make further adjustments after the oblique plane angular deformity has been corrected. This leads to an undesirable sequential correction of the deformity. An attempt at a “ring-in-ring assembly” must be made in order to correct rotation and angulation simultaneously; however, this makes the osteotomy and application of the ring fixators complex and prone to error. Feldman [4] performed residual deformity correction in seven patients and achieved successful correction in all. We, too, used the residual program successfully in two patients. In the second patient in our study, we could not achieve an acceptable correction due to an inaccurate initial assessment. This patient had tibia vara with internal rotation, and we tried twice but as a result of our inexperience with the TSF at that time, we excluded the patient from our study and decided to use an IEF.
“Acute” corrective osteotomy in the management of tibia vara can be complicated by peroneal nerve palsy, compartment syndrome, residual deformity, limb-length inequality, delayed union and failure of fixation [5]. Neurovascular complications [19], residual varus, postoperative neurapraxia [11] and delayed union [10] have also been reported by other authors. Proximal tibial osteotomy, hemiepiphysiodesis, asymmetrical physeal distraction and elevation of the medial tibial plateau have been described for the management of tibia vara [7]. Price et al. [11] used gradual correction with a uniplanar dynamic fixator while several other authors used the IEF [2, 8, 17, 19]. Feldman [3] presented the first report of using a TSF in the treatment of tibia vara with success in 19 patients (22 tibias)—six with infantile and 13 with adolescent tibia vara. On the basis of mechanical axis correction, 21 of these 22 tibias were corrected to within 3° of normal alignment. We used a TSF for four patients with tibia vara, producing excellent results with no major complication.
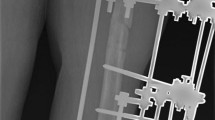
The TSF technique has not previously been reported in genu valgum and the equinus foot (Table 2). In our study, full correction was achieved in two deformed feet—one postburn and the other a posttrauma equinus. The latter was associated with limitation of motion of the ankle and the result was rated as good. We also treated two patients with valgus knee deformity but limitation of knee-joint movement unfortunately occurred in both. One knee of a patient with bilateral genu valgus was completely corrected and was rated as good (Fig. 1A-C). The other was “undercorrected” and was rated as fair. We also did bifocal lengthening of two femurs. One, which was associated with tibia hemimelia, had previously been treated with arthrodesis between the lower end of the femur and the fibula with a view to later management by amputation and the use of an orthosis. Currently, she continues to be able to walk without amputation.

AP and LAT radiograph of the right leg of an 18-year-old male patient with bilateral genu valgus; B during follow-up; C radiograph after frame removal
There is a steep learning curve associated with the use of the Ilizarov system in the management of multiaxial deformity [22]. However, Feldman et al. were able to correct multiaxial deformities using the TSF with relative ease, especially as they made use of a computer software program that made planning and correction of the deformity relatively straightforward [4]. This has also been the experience of other authors who have used computer-assisted, six axes correction either by a TSF [13, 15] or by a hexapod [16].
Feldman et al. recommended using the “total residual program,” which allows correction of the deformity without first making the rings parallel [4]. We have found this technique to be useful but the relevant patients were treated after the conclusion of the study we report here. Feldman et al. chose the TSF method when it seemed likely to prove the most efficient, such as in proximal or distal malunion or nonunion, compromised skin, infection, severe deformities that were not amenable to “acute” correction and failed external fixation [4]. The cost of the TSF is high enough to limit the frequency that we could use it—about US $4,500 compared to US $500 for an IEF.
All patients in Feldman’s study were able to follow their frame adjustment schedules with ease [4]. The patient profile in our study necessitated Arabic translation of the chart and long teaching sessions with explanation and demonstration. Even so, our patients had to be carefully supervised by our medical staff.
Despite the cost, the patient profile and the steep learning curve of using the TSF in lengthening and deformity correction of the lower limbs, our results are encouraging. However, in our community at the present time, it is probably preferable to use the IEF.
References
Cattaneo R, Catagni M, Johnson EE (1992) The treatment of infected nonunions and segmental defects of the tibia by the methods of Ilizarov. Clin Orthop 280:143–152
Coogan PG, Fox JA, Fitch RD (1996) Treatment of adolescent Blount disease with circular external fixation device and distraction osteogenesis. J Pediatr Orthop 16:450–454
Feldman DS, Madan SS, Koval KJ, van Bosse HJ, Bazzi J, Lehman WB (2003) Correction of tibia vara with six-axis deformity analysis and the Taylor Spatial Frame. J Pediatr Orthop 23(3): 387–91. PMID: 12724607
Feldman DS, Shin SS, Madan S, Koval KJ (2003) Correction of tibial malunion and nonunion with six-axis analysis deformity correction using the Taylor Spatial Frame. J Orthop Trauma 17(8): 549–54. PMID: 14504575
Henderson RC, Kemp GJ, Greene WB (1992) Adolescent tibia vara: alternatives for operative treatment. J Bone Joint Surg Am 74:342–350
Ilizarov GA (1992) Transosseous osteosynthesis. Springer, Berlin Heidelberg New York, pp 287–543
Langenskoild A (1981) Tibia vara, osteochondrosis deformans tibiae. Blount disease. Clin Orthop 158:77–82
Monticelli G, Spinelli R (1984) A new method of treating the advanced stages of tibia vara Blount disease. Ital J Orthop Traumatol 10:295–303
Paley D (2002) Radiographic assessment of lower limb deformities. In: Paley D, ed. Principles of Deformity Correction. Springer, Berlin Heidelberg New York, pp 31–60
Pinkowski JL, Weiner DS (1995) Complication in proximal tibial osteotomies in children with presentation of technique. J Pediatr Orthop 15:307–312
Price CT, Scott DS, Greenberg DA (1995) Dynamic axial external fixation in the surgical treatment of tibia vara. J Pediatr Orthop 15:236–243
Rodl R, Leidinger B, Bohm A, Winkelmann W (2003) Correction of deformities with conventional and hexapod frames--comparison of methods. Z Orthop Ihre Grenzgeb 141(1): 92–8. PMID: 12605337
Rozbruch SR, Helfet DL, Blyakher A. (2002) Distraction of hypertrophic non-union of tibia with deformity using Ilizarov/Taylor Spatial Frame: reportof two cases. Arch Orthop Trauma Surg; 122:295–298. PMID: 12070651
Saleh M, Royston S (1996) Management of nonunion of fractures by distraction with correction of angulation and shortening. J Bone Joint Surg Br 78:105–109
Schatz KD, Nehrer S, Dorotka R, Kotz R (2002) 3D-navigated high energy shock wave therapy and axis correction after failed distraction treatment of congenital tibial pseudarthrosis. Orthopade 31:663–666
Seide K, Wolter D, Kortmann HR (1999) Fracture reduction and deformity correction with hexapod Ilizarov fixator. Clin Orthop 363:186–195
Shevtsov VI, Maer VI (1980) Ambulatory treatment of children with Erlacher-Blount disease by Ilizarov’s transosseous osteosynthesis. Orthop Traumatol 1:53–55
Sluga M, Pfeiffer M, Kotz R, Nehrer S. (2003) Lower limb deformities in children: two-stage correction using the Taylor spatial frame. J Pediatr Orthop B 12(2): 123–8. PMID: 12584497
Steel HH, Sandrow RE, Sullivan PH (1971) complication of tibial osteotomy in children for genu varum or valgum. J Bone Joint Surg Am 53:1629–1635
Taylor JC (2000) Correction of general deformity with Taylor Spatial Frame. www.jcharlestaylor.com. Accessed October 25
Taylor JC (2002) Six-axis deformity analysis and correction. In: Paley D, ed. Principles of Deformity Correction. Springer, Berlin Heidelberg New York, pp 411–436
Tetsworth KD, Paley D (1994) Accuracy of correction of complex lower extremity deformities by the Ilizarov method. Clin Orthop; 301:102–110.
Tucker H, Kendra JC, Kinnebrew TE (1992) Management of unstable open and closed tibial fractures using the Ilizarov method. Clin orthop 280:125–135
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Fadel, M., Hosny, G. The Taylor spatial frame for deformity correction in the lower limbs. International Orthopaedics (SICOT) 29, 125–129 (2005). https://doi.org/10.1007/s00264-004-0611-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00264-004-0611-9