
Abstract
We consider an elliptic variational–hemivariational inequality with constraints in a reflexive Banach space, denoted \(\mathcal{P}\), to which we associate a sequence of inequalities \(\{\mathcal{P}_n\}\). For each \(n\in \mathbb {N}\), \(\mathcal{P}_n\) is a variational–hemivariational inequality without constraints, governed by a penalty parameter \(\lambda _n\) and an operator \(P_n\). Such inequalities are more general than the penalty inequalities usually considered in literature which are constructed by using a fixed penalty operator associated to the set of constraints of \(\mathcal{P}\). We provide the unique solvability of inequality \(\mathcal{P}_n\). Then, under appropriate conditions on operators \(P_n\), we state and prove the convergence of the solution of \(\mathcal{P}_n\) to the solution of \(\mathcal{P}\). This convergence result extends the results previously obtained in the literature. Its generality allows us to apply it in various situations which we present as examples and particular cases. Finally, we consider a variational–hemivariational inequality with unilateral constraints which arises in Contact Mechanics. We illustrate the applicability of our abstract convergence result in the study of this inequality and provide the corresponding mechanical interpretations.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Variational and hemivariational inequalities represent a powerful tool in the study of a large number of nonlinear boundary value problems. The theory of variational inequalities was developed in early sixty’s, by using arguments of monotonicity and convexity, including properties of the subdifferential for convex functions. In contrast, the analysis of hemivariational inequalities uses as main ingredient the properties of the subdifferential in the sense of Clarke, defined for locally Lipschitz functions which may be nonconvex. Hemivariational inequalities were first introduced in early eighty’s by Panagiotopoulos in the context of applications in engineering problems. Studies of variational and hemivariational inequalities can be found in monographs [1, 7, 8, 18, 21, 22] and research papers [2, 11, 16, 17, 20, 23, 30,31,32,33,34,35,36,37,38, 40, 42].
Variational–hemivariational inequalities represent a special class of inequalities, governed by both convex and nonconvex functions. A recent reference in the field is the monograph [28]. There, existence, uniqueness and convergence results have been obtained for the elliptic, history-dependent and evolutionary cases. These results have been used in the study of various mathematical models which describe the contact between a deformable body and a foundation. Recently, a considerable effort was done to derive error estimates for discrete scheme associated to variational–hemivariational inequalities. At the best of our knowledge, paper [11] represents the first paper that provides an optimal order error estimate for the linear finite element method in solving hemivariational or variational–hemivariational inequalities. We refer the readers to [12, 13] for internal numerical approximations of variational–hemivariational inequalities, and [9] for both internal and external numerical approximations of such inequalities.
In this paper we consider the following inequality problem.
Problem
\(\mathcal{P}\). Find an element \(u\in K\) such that
Here and everywhere in this paper X is a real reflexive Banach space, \(\langle \cdot ,\cdot \rangle \) denotes the duality pairing between X and its dual \(X^*\), \(K\subset X\), \(A :X \rightarrow X^*\), \(\varphi :X \times X \rightarrow \mathbb {R}\), \(j :X \rightarrow \mathbb {R}\) and \(f\in X^*\). Moreover, \(j^0(u;v)\) represents the generalized directional derivative of j at the point u in the direction v. Note that the function \(\varphi (u, \cdot )\) is assumed to be convex for any \(u\in X\) and the function j is locally Lipschitz and, in general, nonconvex. Therefore, (1) is a variational–hemivariational inequality and, since the data and the solution do not depend on the time variable, we sometimes refer to this inequality as an elliptic variational–hemivariational inequality.
The existence and uniqueness of the solution to the problem (1) was proved [19], based on arguments of multivalued pseudomonotone operators and the Banach fixed point theorem. The continuous dependence of the solution with respect to the data A, \(\varphi \), j, f and K has been studied in [39, 41], where convergence results have been obtained, under various assumptions. A comprehensive reference on the numerical analysis Problem \(\mathcal{P}\) is the survey paper [10].
Note that Problem \(\mathcal{P}\) is governed by a set of constraints K. Therefore, for both theoretical and numerical reasons, it is useful to approximate it by using a penalty method. The classical penalty method aims to replace Problem \(\mathcal{P}\) by a sequence of problems \(\{\overline{\mathcal{P}}_n\}\) which, for every \(n\in \mathbb {N}\), can be formulated as follows.
Problem
\(\overline{\mathcal{P}}_n\). Find an element \(\overline{u}_n\in X\) such that
Note that Problem \(\overline{\mathcal{P}}_n\) is formally obtained from Problem \(\mathcal{P}\) by removing the constraint \(u\in K\) and including a penalty term governed by a parameter \(\lambda _n>0\) and an operator \(P:X\rightarrow X^*\). Penalty methods have been used as an approximation tool to treat constraints in variational inequalities [8, 15, 26, 29] and variational–hemivariational inequalities [19, 28, 31]. In particular, the existence of a unique solution to Problem \(\overline{\mathcal{P}}_n\) together with its convergence to the solution of Problem \(\mathcal{P}\) as \(\lambda _n\rightarrow 0\) was proved in [19, 28], under the assumption that P is a penalty operator of the set K, see Definition 7 below.
An extension of \(\overline{\mathcal{P}}_n\) can be obtained by replacing in (2) the operator P with an operator \(P_n:X\rightarrow X^*\) which depends on n. This problem can be stated as follows.
Problem
\(\mathcal{P}_n\). Find an element \(u_n\in X\) such that
Note that Problem \(\mathcal{P}_n\) is formally obtained from Problem \(\mathcal{P}\) by removing the constraint \(u\in K\) and including a penalty term governed by a parameter \(\lambda _n>0\) and an operator \(P_n:X\rightarrow X^*\) which, in contrast to (2), depends on n.
The aim of this paper is twofold. The first one is to prove the unique solvability of Problem \(\mathcal{P}_n\) and the convergence of its solution to the solution of Problem \(\mathcal{P}\). The main difficulty on this matter consists in constructing appropriate assumptions to establish a link between the operators \(P_n\) and the set K, which guarantees the convergence \(u_n\rightarrow u\) in X. Note that in the particular case of Problem \(\overline{\mathcal{P}}_n\) this convergence follows from the assumption that P is a penalty operator of K, which represents a simple and elegant condition. Extending this condition to conditions which still guarantee the convergence when P is replaced by \(P_n\) represents the first trait of novelty of this paper.
Our second aim is to illustrate some applications of the convergence result \(u_n\rightarrow u\) in X. Note that this convergence extends the convergence result \(\overline{u}_n\rightarrow u\) in X, obtained in [19, 28]. It shows that for n large enough, the solution of Problem \(\mathcal{P}\) (with constraint) can be approximated by the solution of problem \(\mathcal{P}_n\) (without constraint), which is more general than Problem \(\mathcal{\overline{P}}_n\). The generality of our convergence result allows us to obtain various consequences which are new and interesting in their own. This represents the second trait of novelty of this paper.
The remainder of the paper is structured as follows. In Sect. 2 we introduce some preliminary material, and then we recall the existence and uniquenss result obtained in [19, 27]. In Sect. 3 we state and prove our main results, Theorems 9 and 10. The proofs are based on arguments of compactness, monotonicity and semicontinuity, combined with the properties of the Clarke subdifferential. In Sect. 4 we deduce some consequences of Theorems 9 and 10 that we present in a form of relevant particular cases. Finally, in Sect. 5 we illustrate the use of these theorems in the study of a variational–hemivariational inequalty which arises in Contact Mechanics and provide the corresponding mechanical interpretations.
2 Preliminaries
We start with some notation and preliminaries and refer the readers to [4,5,6, 14, 24, 43] for more details on the material presented below in this section. We use \(\Vert \cdot \Vert _X\) and \(\Vert \cdot \Vert _{X^*}\) for the norm on the spaces X and \(X^*\), and \(0_X\), \(0_{X^*}\) for the zero element of X and \(X^*\), respectively. All the limits, upper and lower limits below are considered as \(n\rightarrow \infty \), even if we do not mention it explicitly. The symbols “\(\rightharpoonup \)” and “\(\rightarrow \)” denote the weak and the strong convergence in various spaces which will be specified.
For real valued functions defined on X we recall the following definitions.
Definition 1
A function \(\varphi :X \rightarrow \mathbb {R}\) is lower semicontinuous (l.s.c.) if \(x_n \rightarrow x\) in X implies \(\liminf \varphi (x_n)\ge \varphi (x)\). A function \(\varphi :X \rightarrow \mathbb {R}\) is weakly lower semicontinuous (weakly l.s.c.) if \(x_n \rightharpoonup x\) in X implies \(\liminf \varphi (x_n)\ge \varphi (x)\).
Definition 2
A function \(j :X \rightarrow \mathbb {R}\) is said to be locally Lipschitz, if for every \(x \in X\), there exist \(U_x\), a neighborhood of x, and a constant \(L_x>0\) such that \( |j(y) - j(z)| \le L_x \Vert y - z \Vert _X \) for all y, \(z \in U_x\). For such functions the generalized Clarke’s directional derivative of j at the point \(x \in X\) in the direction \(v \in X\) is defined by
The generalized Clarke’s gradient (subdifferential) of j at x is a subset of the dual space \(X^*\) given by
The function j is said to be regular (in the sense of Clarke) at the point \(x \in X\) if for all \(v \in X\) the one-sided directional derivative \(j' (x; v)\) exists and \(j^0(x; v) = j'(x; v)\).
We shall use the following properties of the generalized directional derivative and the generalized gradient.
Proposition 3
Assume that \(j :X \rightarrow \mathbb {R}\) is a locally Lipschitz function. Then the following hold:
-
(i)
For every \(x \in X\), the function \(X \ni v \mapsto j^0(x;v) \in \mathbb {R}\) is positively homogeneous and subadditive, i.e., \(j^0(x; \lambda v) = \lambda j^0(x; v)\) for all \(\lambda \ge 0\), \(v\in X\) and \(j^0 (x; v_1 + v_2) \le j^0(x; v_1) + j^0(x; v_2)\) for all \(v_1\), \(v_2 \in X\), respectively.
-
(ii)
For every \(v \in X\), we have \(j^0(x; v) = \max \, \{ \, \langle \xi , v \rangle \ :\ \xi \in \partial j(x) \, \}\).
Next, we proceed with some definitions for nonlinear operators.
Definition 4
An operator \(A :X \rightarrow X^*\) is said to be:
-
(a)
monotone, if for all u, \(v \in X\), we have \(\langle Au - A v, u-v \rangle \ge 0\);
-
(b)
strongly monotone, if there exists \(m_A > 0\) such that
$$\begin{aligned} \langle Au - Av, u-v \rangle \ge m_A \Vert u - v \Vert _X^{2}, \quad \text{ for } \text{ all } \ u,\, v \in X; \end{aligned}$$ -
(c)
bounded, if A maps bounded sets of X into bounded sets of \(X^*\);
-
(d)
pseudomonotone, if it is bounded and \(u_n \rightarrow u\) weakly in X with
$$\begin{aligned} \displaystyle \limsup \,\langle A u_n, u_n -u \rangle \le 0 \end{aligned}$$implies \(\displaystyle \liminf \, \langle A u_n, u_n - v \rangle \ge \langle A u, u - v \rangle \) for all \(v \in X\);
-
(e)
demicontinuous, if \(u_n \rightarrow u\) in X implies \(A u_n \rightarrow Au\) weakly in \(X^*\).
We shall use the following results related to the pseudomonotonicity of operators.
Proposition 5
For a reflexive Banach space X the following statements hold.
-
(a)
If the operator \(A:X \rightarrow X^*\) is bounded, demicontinuous and monotone, then A is pseudomonotone.
-
(b)
If A, \(B :X \rightarrow X^*\) are pseudomonotone operators, then the sum \(A+B :X \rightarrow X^*\) is pseudomonotone.
We turn now to the study of (1) and, to this end, we consider the following hypotheses on the data.
It can be proved that for a locally Lipschitz function \(j :X \rightarrow \mathbb {R}\), hypothesis (7)(c) is equivalent to the so-called relaxed monotonicity condition see, e.g., [18]. Note also that if \(j :X \rightarrow \mathbb {R}\) is a convex function, then (7)(c) holds with \(\alpha _j = 0\), since it reduces to the monotonicity of the (convex) subdifferential. Examples of functions which satisfy condition (7)(c) have been provided in [18, 19, 28], for instance.
The unique solvability of the variational–hemivariational inequality (1) is provided by the following version of Theorem 18 in [19], provided by Remark 13 in [28].
Theorem 6
Assume (4)–(9). Then, inequality (1) has a unique solution \(u \in K\).
The Proof of Theorem 6 is carried out in several steps, by using the properties of the subdifferential, a surjectivity result for pseudomonotone multivalued operators and the Banach fixed point argument.
We conclude this section by introducing the notion of the penalty operator.
Definition 7
An operator \(P :X \rightarrow X^*\) is said to be a penalty operator of the set \(K\subset X\) if P is bounded, demicontinuous, monotone and \(K = \{ x \in X \mid Px = 0_{X^*} \}\).
Note that the penalty operator always exists. Indeed, we recall that any reflexive Banach space X can be always considered as equivalently renormed strictly convex space and, therefore, the duality map \(J :X \rightarrow 2^{X^*}\), defined by
is a single-valued operator. Then, the following result holds.
Proposition 8
Let X be a reflexive Banach space, K a nonempty closed and convex subset of X, \(J :X \rightarrow X^*\) the duality map, \(I:X \rightarrow X\) the identity map on X, and \(\widetilde{P}_K :X \rightarrow K\) the projection operator on K. Then \(P_K= J (I - \widetilde{P}_K):X\rightarrow X^*\) is a penalty operator of K.
Recall that if X is a Hilbert space then \(J:X\rightarrow X^*\) is the canonical isometry. Therefore, for the operator \(P_K = J (I_X - \widetilde{P}_K):X\rightarrow X^*\) in Proposition 8 we deduce that
Moreover, recall that for each \(x\in X\), \(\widetilde{P}_Kx\) is the unique element in K which satisfies the inequality
Relations (10), (11) will be used in various places in Sects. 4 and 5 of this paper.
3 Main Results
In this section we state and prove our existence, uniqueness and convergence result, Theorems and 9 and 10. To this end, we consider a family of operators \(\{P_n\}\) and a sequence \(\{\lambda _n\}\subset \mathbb {R}\) such that, for each \( n\in \mathbb {N}\), the following hold:
The existence of a unique solution to Problem \(\mathcal{P}_n\) is a direct consequence of Theorem 6.
Theorem 9
Assume (5)–(9), (12) and (13). Then, for each \(n\in \mathbb {N}\), there exists a unique solution \(u_n\in X\) to Problem \(\mathcal{P}_n\).
Proof
Let \(n\in \mathbb {N}\). Assumptions (12), (13) and Proposition 5(a) imply that the operator \(\frac{1}{\lambda _n}P_n:X\rightarrow X^*\) is pseudomonotone. Therefore, Proposition 5(b) shows that the operator \(A_n:X\rightarrow X^*\) defined by \(A_n=A+\frac{1}{\lambda _n}P_n\) is pseudomonotone, too. Moreover, since \(P_n\) is monotone and \(\lambda _n>0\), using assumption (5)(b) we deduce that \(A_n\) is strongly monotone with constant \(m_A\). We conclude from above that the operator \(A_n\) satisfies condition (5). This allows us to use Theorem 6 with K and A replaced by X and \(A_n\), respectively. In this way we obtain the unique solvability of the inequality (2) which concludes the proof. \(\square \)
To study the behavior of the sequence of solutions to Problems \(\mathcal{P}_n\) as \(n\rightarrow \infty \), we consider the following additional hypotheses.
A simple exemple of function \(\varphi \) which satisfies conditions (17) and (18) is given by
Here \(X=H^1(\varOmega )\) is the Sobolev space of the first order associated to a bounded domain \(\varOmega \subset \mathbb {R}^d\) with smooth boundary \(\varGamma \) and, for each \(u\in X\) we still write u for the trace of u to \(\varGamma \).
Our main result in this section is the following.
Theorem 10
Assume (4)–(9), (12)–(19) and denote by \(u_n\) the solution of Problem \(\mathcal{P}_n\). Then \(u_n\rightarrow u\) in X, as \(n\rightarrow \infty \), where \(u \in K\) is the unique solution of Problem \(\mathcal{P}\).
Proof
The proof of Theorem 10 is carried out in several steps.
-
(i)
We claim that there is an element \({\widetilde{u}} \in X\) and a subsequence of \(\{ u_n \}\), still denoted \(\{ u_n \}\), such that \(u_n \rightharpoonup {\widetilde{u}}\) in X as \(n\rightarrow \infty \).
To prove the claim, we establish the boundedness of \(\{ u_n \}\) in X. Let v be a given element in K. We use assumption (14) and consider a sequence \( \{v_n\}\subset X\) such that \(P_nv_n=0_{X^*}\) for all \(n\in \mathbb {N}\) and
Let \(n\in \mathbb {N}\). We now put \(v_n\in X\) in (3) and use the strong monotonicity of the operator A to obtain
Next, since \(P_nv_n=0_{X^*}\), assumption (12) implies that
and assumptions (6)(b), (17) yield
On the other hand, by (7) and Proposition 3(ii), we have
and, obviously,
We now combine inequalities (21)–(25) to see that
Note that by (20) we know that the sequence \(\{v_n\}\) is bounded in X. Therefore, using inequality (26), the smallness assumption (8) and the properties of the operator A and function \(c_\varphi \) we deduce that there is a constant \(C > 0\) independent of n such that \(\Vert u_n-v_n\Vert _X \le C\). This implies that \(\{u_n\}\) is bounded sequence in X. Thus, from the reflexivity of X, by passing to a subsequence, if necessary, we deduce that
with some \({\widetilde{u}} \in X\). This implies the claim.
-
(ii)
Next, we show that \({\widetilde{u}} \in K\) is a solution to Problem \(\mathcal{P}\).
Let v be a given element in X. We use (3) to obtain that
Then, by conditions (5), (7), (17), using the boundedness of the sequence \( \{u_n\}\) and arguments similar to those used in the proof of (26), we deduce that each term in the right hand side of inequality (28) is bounded. This implies that there exists a constant \(D>0\) which does not depend on n such that
We now pass to the upper limit in this inequality and use the convergence (15) to deduce that
We now take \(v=\widetilde{u}\) in (29) to find that
then we use assumptions (16)(a) and (27) to obtain that
and, finally, we combine this inequality with (29) to find that \(\langle P {\widetilde{u}}, {\widetilde{u}} - v \rangle \le 0\). Hence, choosing \(v = {\widetilde{u}} + w\) with \(w \in X\), we get \(\langle P {\widetilde{u}}, w \rangle = 0\) for all \(w \in X\). So, it is clear that \(P {\widetilde{u}} = 0_{X^*}\) and, therefore, (16)(b) implies that \({\widetilde{u}} \in K\).
Consider now a given element \(v\in K\). We use assumption (14) to find a sequence \( \{v_n\}\) such that \(P_nv_n=0_{X^*}\) for all \(n\in \mathbb {N}\) and (20) holds. Let \(n\in \mathbb {N}\). We now put \(v_n\in X\) in (3) and use the equality \(P_nv_n=0_{X^*}\) to obtain that
Therefore, by the monotonicity of the operator \(P_n\) we find that
Next, using (27), (20) and assumption (18) we have
On the other hand, from (27), (20) and (19), it follows that
Moreover,
We now gather relations (30)–(33) to see that
Next, the properties of A combined with the convergences (27) and (20) imply that \(\langle A u_n, v - v_n \rangle \rightarrow 0\). Therefore, writing
we deduce that
This equality combined with inequality (34) yields
for all \(v\in K\). Now, taking \(v= {\widetilde{u}} \in K\) in (35) and using Proposition 3(i) we obtain that
This inequality together with (27) and the pseudomonotonicity of A implies
Combining now (37) and (35), we have
for all \(v \in K\). Hence, it follows that \({\widetilde{u}} \in K\) is a solution to Problem \(\mathcal{P}\), as claimed.
-
(iii)
We now prove the weak convergence of the whole sequence \(\{u_n\}\).
Since Problem \(\mathcal{P}\) has a unique solution \(u \in K\), we deduce that \({\widetilde{u}} = u\). A careful analysis of the proof in step (ii) reveals that every subsequence of \(\{ u_n \}\) which converges weakly in X has the weak limit u. Moreover, we recall that the sequence \(\{ u_n \}\) is bounded in X. Therefore, using a standard argument we deduce that the whole sequence \(\{ u_n \}\) converges weakly in X to u, as \(n\rightarrow \infty \).
-
(iv)
In the final step of the proof, we prove that \(u_n \rightarrow u\) in X, as \(n\rightarrow \infty \).
We take \(v = {\widetilde{u}} \in K\) in (37) and use (36) to obtain
which shows that \(\langle A u_n, u_n - {\widetilde{u}} \rangle \rightarrow 0\), as \(n\rightarrow \infty \). Therefore, using equality \(\widetilde{u}=u\), the strong monotonicity of A and the convergence \(u_n \rightharpoonup u\) in X, we have
as \(n\rightarrow \infty \). Hence, it follows that \(u_n \rightarrow u\) in X, which completes the proof. \(\square \)
We end this section by considering the following condition.
The interest in this condition follows from the next lemma.
Lemma 11
Assume that (38) holds. Then, the operator P satisfies condition (16)\((\mathrm{a})\).
Proof
Let \(v\in X\) and let \(\{u_n\}\subset X\) be a sequence such that \(u_n\rightharpoonup u\ \text{ in }\ X\) and
It follows from here that \(\{u_n\}\) is bounded and, therefore, assumption (38) yields
On the other hand, for each \(n\in \mathbb {N}\) we write
and, using (40) we deduce that
We now take \(v=u\) in (41) and use (39) to obtain that
Then, using the pseudomonotonicity of P and (42) we find that
which concludes the proof. \(\square \)
Lemma 11 shows that condition (38) implies (16)(a). Moreover, note that checking (38) is more convenient in various applications than checking (16)(a). For this reason condition (38) will be used in several places in the rest of the paper.
4 Relevant Particular Cases
In this section we present some particular cases of penalty problems of the form (3) for which the results in Theorems 9 and 10 hold, and which have some interest on their own. Everywhere below we assume that (5)–(9), (13), (15) and (17)–(19) hold. With these data we consider problems \(\mathcal{P}\) and \(\mathcal{P}_n\) in which both K and \({P_n}\) will change from place to place and, for this reason, will be described below, in each particular case. For each example, we shall prove that conditions (4), (12), (14) and (16) are satisfied. Therefore, the existence of a unique solution to the corresponding Problem \(\mathcal{P}_n\) will be provided by Theorem 9 and its convergence to the solution of Problem \(\mathcal{P}\) is guaranteed by Theorem 10.
(a) The classical penalty method. This particular case is obtained when K satisfies (4) and \(P_n=P\) where P is a penalty operator of K. Note that in this case inequality (3) becomes the penalty inequality (2).
We now prove the validity of conditions (12), (14) and (16). First, we use Definition 7 to see that the operator P is bounded, demicontinuous and monotone, and, therefore, condition (12) holds. Moreover, conditions (14) and (16)(b) are obviously satisfied, since \(P_n=P\) and P is a penalty operator of K. In addition, Proposition 5(a) guarantees that P is pseudomonotone. Assume now that \(u_n\rightharpoonup u\) in X and \(\displaystyle \limsup \,\langle P_nu_n, u_n -u \rangle \le 0\), which implies that \(\displaystyle \limsup \,\langle Pu_n, u_n -u \rangle \le 0\). Then, using equality \(P_n=P\) and the pseudomonotonicity of P, we have
which shows that (16)(a) holds.
We are now in a position to apply Theorems 6 and 9 in order to obtain the following result.
Corollary 12
Assume (4)–(9), (13) and, moreover, assume that \(P:X\rightarrow X^*\) is a penalty operator of the set K. Then, for each \(n\in \mathbb {N}\), there exists a unique solution \(\overline{u}_n\in X\) to Problem \(\overline{\mathcal{P}}_n\). In addition, if (15) and (17)–(19) hold, then \(\overline{u}_n\rightarrow u\) in X, as \(n\rightarrow \infty \), where \(u \in K\) is a unique solution to Problem \(\mathcal{P}\).\(\Box \)
Corollary 12 was obtained in [19], in the particular case when \(\varphi (u,v)=\varphi (v)\). Its proof in the general case, when \(\varphi \) depends on both u and v, was given in [28].
(b) An unconstrained variational–hemivariational inequality. This particular case is obtained when \(K=X\) and, for each \(n\in \mathbb {N}\), \(P_n:X\rightarrow X^*\) is a penalty operator of the closed ball \(B_n=\{\,v\in X\ :\ \Vert v\Vert _X\le n\,\}\). Note that in this case Problem \(\mathcal{P}\) reads as follows : find an element \(u\in X\) such that
We now prove the validity of conditions (12) (14) and (16). First, we use Definition 7 to see that the operator \(P_n\) is bounded, demicontinuous and monotone, for each \(n\in \mathbb {N}\). Therefore, condition (12) holds. Let \(v\in X\). Then, it is easy to see that the sequence \(\{v_n\}\subset X\) defined by
satisfies condition (14). Let \(P:X\rightarrow {X^*}\) be such that \(Pv=0_{X^*}\) for any \(v\in X\), and let \(u_n\rightharpoonup u\) in X. Then the sequence \(\{u_n\}\) is bounded in X and, therefore, for n large enough we have \(\Vert u_n\Vert _X\le n\), i.e., \(u_n\in B_n\), which implies that \(P_nu_n=0_{X^*}\). We deduce from here that condition (38) holds and, by Lemma 11 it follows that (16)(a) holds, too. Finally, note that condition (16)(b) is obviously satisfied.
We now use Theorems 9 and 10 to deduce that for each \(n\in \mathbb {N}\), there exists a unique solution \({u}_n\in X\) to Problem \(\mathcal{P}_n\) and, moreover, \({u}_n\rightarrow u\) in X, as \(n\rightarrow \infty \), where u is a unique solution to the variational–hemivariational inequality (43).
We note that the previous convergence result is not surprising. Indeed, it follows from the proof of Theorem 9 that the sequence \(\{u_n\}\) is bounded in X. Therefore, with the choice above on \(P_n\) we have \(P_nu_n=0\) for n large enough. It follows from here that Problem \(\mathcal{P}_n\) becomes Problem \(\mathcal{P}\) for n large enough, which shows that \(u_n=u\) for n large enough and confirms the convergence \(u_n\rightarrow u\) in X.
(c) Penalty method associated to the Hausdorff convergence of sets. For this example we assume that X is a Hilbert space, K satisfies condition (4) and, for each \(n\in \mathbb {N}\), \(P_n=J(I-\widetilde{P}_{n}):X\rightarrow X^*\) where \(J:X\rightarrow X^*\) is the canonical isometry, \(I:X\rightarrow X\) is the identity map and \(\widetilde{P}_{n}\) is the projection operator on a set \(K_n\), assumed to satisfy condition (4). In addition, we assume that
Here and below \(\mathcal{H}(A,B)\) denotes the Hausdorff distance of the sets \(A, B\subset X\), assumed to be nonempty. For the convenience of the reader we recall that
where
We now prove the validity of conditions (12), (14) and (16). First, we use Proposition 8 and Definition 7 to see that (12) holds. Assume now that \(v\in K\). Then, using (11) and (45)–(47) we have
and, therefore, assumption (44) implies that \(\widetilde{P}_{n}v\rightarrow v\) in X. Denote \(v_n=\widetilde{P}_{n}v\). Then \(v_n\in K_n\) and, therefore, \(P_nv_n=J(v_n-\widetilde{P}_{n}v_n)=0_{X^*}\). Moreover, recall that \(v_n\rightarrow v\) in X. We conclude from here that condition (14) is satisfied.
Next, let \(P:X\rightarrow X^*\) be the operator defined by \(P=J(I-\widetilde{P})\) where \(\widetilde{P}:X\rightarrow K\) denotes the projection operator on K. Let \(\{u_n\}\subset X\) be a sequence which is weakly convergent. Then, using (10) and (45)–(47) we deduce that
for each \(n\in \mathbb {N}\). Therefore condition (44) implies
On the other hand, by Propositions 8, Definition 7 and Proposition 5 we see that P is a pseudomonotone operator. We deduce from above that condition (38) holds and, by Lemma 11 it follows that (16)(a) holds, too. In addition, condition (16)(b) is obviously satisfied.
We are now in a position to apply Theorems 9 and 10 in order to obtain the following result.
Corollary 13
Let X be a Hilbert space. Assume (4)–(9), (13) and, moreover, and, for each \(n\in \mathbb {N}\) assume that \(P_n=J(I-\widetilde{P}_{n}):X\rightarrow X^*\) where \(J:X\rightarrow X^*\) is the canonical isometry, \(I:X\rightarrow X\) is the identity map and \(\widetilde{P}_{n}\) is the projection operator on the set \(K_n\), assumed to satisfy (4). Then, for each \(n\in \mathbb {N}\), there exists a unique solution \({u}_n\in X\) to Problem \(\mathcal{P}_n\). In addition, if (15), (17)–(19) and (44) hold, then \({u}_n\rightarrow u\) in X, as \(n\rightarrow \infty \), where \(u \in K\) is the unique solution to Problem \(\mathcal{P}\).
(d) Penalty method associated to affine transformation of the set of constraints. For this last example in this section we assume that X is a Hilbert space, K satisfies conditions (4) and, for each \(n\in \mathbb {N}\), \(P_n=J(I-\widetilde{P}_{n}):X\rightarrow X^*\) where \(\widetilde{P}_{n}\) is the projection operator on the set
where \(a_n\), \(b_n>0\) and \(\theta \in K\) is given. In addition, we assume that
Here and below the operators J and I are those defined in the previous example. Note that assumption (4) combined with (48) guarantees that \(K_n\) is a closed convex nonempty subset of X and, therefore, the operator \(P_n\) is well defined. Denote by \(P:X\rightarrow X^*\) the operator given by \(P=J(I-\widetilde{P})\) where \(\widetilde{P}:X\rightarrow K\) denotes the projection operator on K. With these notations we prove the validity of conditions (12), (14) and (16).
First, we use Proposition 8 and Definition 7 to see that (12) holds. Next, condition (14) is guaranteed by definition (48) and assumption (49) with \(v_n=a_nv+b_n\theta \), for each \(v\in K\) and \(n\in \mathbb {N}\). Let \(\{u_n\}\subset X\) be a weakly convergent sequence and let \(n\in \mathbb {N}\). Using (10) we deduce that
On the other hand, an elementary calculus based on the definition of the projection, (11), combined with equality (48) reveals that
Recall also the nonexpansivity of the projector on Hilbert spaces, that is
We now substitute inequality (51) in (50), then use the triangle inequality and (52) to deduce that
Recall also that the sequence \(\{u_n\}\) is bounded in X. Therefore, (53) and (49) imply that
The convergence (54) combined with the pseudomonotonicity of P, guaranteed by Proposition 5(a), shows that condition (38) holds and, by Lemma 11 it follows that (16)(a) holds, too. On the other hand, condition (16)(b) is a consequence of Proposition 8.
We are in a position to use Theorems 9 and 10 in order to obtain the following result.
Corollary 14
Let X be a Hilbert space. Assume (4)–(9), (13) and, moreover, for each \(n\in \mathbb {N}\) assume that \(P_n=J(I-\widetilde{P}_{n}):X\rightarrow X^*\) where \(\widetilde{P}_{n}\) is the projection operator on the set \(K_n\), given by (48) with \(a_n\), \(b_n>0\). Then, for each \(n\in \mathbb {N}\), there exists a unique solution \({u}_n\in X\) to Problem \(\mathcal{P}_n\). In addition, if (15), (17)–(19) and (49) hold, then \({u}_n\rightarrow u\) in X, as \(n\rightarrow \infty \), where \(u \in K\) is the unique solution to Problem \(\mathcal{P}\).
We end this section with two remarks. The first one is that in the particular case when the set K is bounded, then the example d) is a particular case of the example c). Indeed, it is easy to see that in this case assumptions (48), (49) imply that (44) holds. The second remark is that that Theorems 9 and 10 can be applied to various elliptic variational–hemivariational inequalities which do not cast in the particular cases presented above. The last section of this manuscript is devoted to the study of such example, which arises in Contact Mechanics.
5 An application in Contact Mechanics
The results presented in Sects. 3 and 4 can be used in the study of various mathematical models which describe the equilibrium of elastic bodies in contact with an obstacle, the so-called foundation. References in the field are the books [3, 18, 26, 28]. Providing a description of such contact models requires to introduce a long list of preliminaries and notation. Therefore, in order to keep this paper in a reasonable length we consider only the variational formulation of a representative contact model which was already studied in [25]. The reason of this choice is two fold. First, the results obtained in [25] provide part of the ingredients we need in our study below. Second, we obtain here a new result, Theorem 16, which extends some of the results obtained in [25].
Let \(\varOmega \subset \mathbb {R}^d\) (\(d=2,3\)) be a domain with smooth boundary \(\varGamma \), divided into three measurable disjoint parts \(\varGamma _1\), \(\varGamma _2\) and \(\varGamma _3\) such that \({ meas}\,(\varGamma _1)>0\). A generic point in \(\varOmega \cup \varGamma \) will be denoted by \({\varvec{x}}=(x_i)\). We use the notation \(\mathbb {S}^d\) for the space of second order symmetric tensors on \(\mathbb {R}^d\). Moreover, \(``\cdot ''\) and \(\Vert \cdot \Vert \) will represent the canonical inner product and Euclidian norms on \(\mathbb {R}^d\) and \(\mathbb {S}^d\), and \({\varvec{\tau }}^D\) denotes the deviator of the tensor \({\varvec{\tau }}\in \mathbb {S}^d\). We use standard notation for the Sobolev and Lebesgue spaces associated to \(\varOmega \) and \(\varGamma \) and for an element \({\varvec{v}}\in H^1(\varOmega )^d\) we still write \({\varvec{v}}\) for the trace of \({\varvec{v}}\) to \(\varGamma \). In addition, we consider the following spaces:
The spaces V and Q are real Hilbert spaces endowed with the inner products given by
where, here and below, \({\varvec{\varepsilon }}({\varvec{v}})\) denotes the linearized strain of \({\varvec{v}}\). The associated norms on these spaces are denoted by \(\Vert \cdot \Vert _V\) and \(\Vert \cdot \Vert _{Q}\), respectively. We use notation \(V^*\) and \(\langle \cdot ,\cdot \rangle \) for the topological dual of V and the duality pairing between \(V^*\) and V, respectively. We also denote by \({\varvec{0}}_V\) the zero element of V and, for any element \({\varvec{v}}\in V\), we denote by \(v_\nu \) and \({\varvec{v}}_\tau \) its normal and tangential components on \(\varGamma \) given by \(v_\nu ={\varvec{v}}\cdot {\varvec{\nu }}\) and \({\varvec{v}}_\tau ={\varvec{v}}-v_\nu {\varvec{\nu }}\), respectively. Finally, we recall that the Sobolev trace theorem yields
where \(\Vert \gamma \Vert \) represents the norm of the trace operator \(\gamma :V \rightarrow L^2(\varGamma _3)^d\).
Consider in what follows the data \(\mathcal{A}\), k, \({\varvec{f}}_0\),\({\varvec{f}}_2\), F, g and \(j_\nu \), assumed to satisfy the following conditions.
Note that in (63) and below we denote by \(\partial j_\nu ({\varvec{x}},\cdot )\) and \(j^0({\varvec{x}},\cdot ;\cdot )\) the generalized gradient and the generalized directional derivative of \(j_\nu \) with respect to the second variable, for a.e. \({\varvec{x}}\in \varGamma _3\).
We now introduce the sets U, W and K defined by
Moreover, let A, \(\varphi \), j, \({\varvec{f}}\) be defined as follows:
for all \({\varvec{u}},{\varvec{v}}\in V\). Assumptions (57)–(63) guarantee that the set K is nonempty and the integrals in (68)–(71) are well-defined. Moreover, (63) implies that j is a locally Lipschitz function on V and, therefore, its directional derivative at any the point \({\varvec{u}}\in V\) in any the direction \({\varvec{v}}\in V\), denoted \(j^0({\varvec{u}};{\varvec{v}})\), is well defined. Finally, note that the function \(\varphi \) does not depend on \({\varvec{u}}\).
With these notations we consider the following problem.
Problem
\(\mathcal{Q}\). Find a function \({\varvec{u}}\in K\) such that
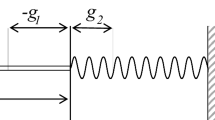
Problem \(\mathcal{Q}\) was introduced in our recent paper [25]. It represents the variational formulation of a mathematical model which describes the equilibrium of an elastic body made of a locking material in frictionless contact with a foundation. Here, the operator \(\mathcal{A}\) is the elasticity operator, assumed to be nonlinear, k represents the yield limit of the von Mises convex which governs the locking constraints of the material, \({\varvec{f}}_0\) denotes the density of body forces and \({\varvec{f}}_2\) represents the density of surface tractions which act on \(\varGamma _3\). The body is fixed on \(\varGamma _1\) and is in potential contact on \(\varGamma _3\) with a foundation made of a rigid body covered by a deformable layer of thickness g and a rigid-plastic crust of yield limit F. The function \(j_\nu \) is the so-called normal compliance function which describes the behaviour of the deformable layer of the foundation.
In the study of Problem \(\mathcal{Q}\) we recall the following existence and uniqueness result.
Theorem 15
Assume that (57)–(64) hold. Then Problem \(\mathcal{Q}\) has a unique solution \({\varvec{u}}\in K\).
The proof of Theorem 15 can be found in [25], based on the abstract existence and uniqueness result provided by Theorem 6. There, it was proved that assumptions (57)–(64) imply conditions (4)–(9) with \(X=V\) and A, \(\varphi \), j, \({\varvec{f}}\) given by (68)–(71).
We now illustrate the use of the abstract results in Theorems 9 and 10 in the study of Problem \(\mathcal{Q}\). To this end we consider a normal compliance function \(p_\nu \) which satisfies the following condition.
A typical example of function satisfying (73) is \(p_\nu ({\varvec{x}},r)=r^+\) for all \(r\in \mathbb {R}\), a.e. \({\varvec{x}}\in \varGamma _3\). Next, for each \(n\in \mathbb {N}\) we assume that \(k_n\) and \(g_n\) satisfy
and we define the sets
Note that \(\varSigma _n\) is a closed convex subset of the Hilbert space Q. These properties allows us to consider the projection operator on \(\varSigma _n\), denoted \(\widetilde{P}_n\). Moreover, using the Riesz representation theorem we define the operator \(P_n:V\rightarrow V^*\) by equality
Assume (13). Then, for each \(n\in \mathbb {N}\), we consider the following problem.
Problem
\(\mathcal{Q}_n\). Find a function \({\varvec{u}}_n\in V\) such that
We also consider the following assumption:
We now state and prove the following existence, uniqueness and convergence result.
Theorem 16
Assume (57)–(64), (73)–(75) and (13). Then:
-
(i)
For each \(n\in \mathbb {N}\), there exists a unique solution \({\varvec{u}}_n\) to Problem \(\mathcal{Q}\).
-
(ii)
If, in addition (82) and (15) hold, the solution \({\varvec{u}}_n\) of Problem \(\mathcal{Q}_n\) converges to the solution \({\varvec{u}}\) of Problem \(\mathcal{Q}\), i.e., \({\varvec{u}}_n \rightarrow {\varvec{u}}\) in V, as \(n \rightarrow \infty \).
Before presenting the proof of Theorem 16 we make the following comments. First, the sets K and \(K_n\) defined by (67) and (78), respectively, do not satisfy an equality of the form (48). Moreover, the operator \(P_n\) is not expressed in terms of the projection operator on \(K_n\). We conclude from here that we are not in a position to obtain Theorem 16 as a consequence of Corollaries 13 or 14. In fact, Problem \(\mathcal{Q}_n\) represents a type of penalty problem which does not cast in the particular cases treated in Sect. 4. This example shows, once more, that our results in this paper can be used in the study of a large class of the penalty problems.
Next, we consider the closed convex subset of Q given by
and denote by \(\widetilde{P}:Q\rightarrow \varSigma \) the projection operator on \(\varSigma \). Moreover, we use the Riesz representation theorem, again, to define the operator \(P:V\rightarrow V^*\) by equality
The proof of Theorem 16 requires some preliminaries that we recall in what follows together with the corresponding references.
Lemma 17
Under the assumption (63), the function (70) satisfies the following property:
Lemma 18
Assume that \(g_n\), g, \(k_n\), \(k>0\). Then, the operators \(P_n:V\rightarrow V^*\) and \(P:V\rightarrow V^*\) are penalty operators to the sets \(K_n\) and K, respectively, i.e., they satisfy the conditions in Definition 7 with \(X=V\) and \(K_n\), K given by (78) and (67).
Lemma 19
Assume that \(k_n\), \(k>0\). Then, the projection operators \(\widetilde{P}_n:Q\rightarrow \varSigma _n\) and \(\widetilde{P}:Q\rightarrow \varSigma \) satisfy the following condition:
Lemma 17 is a direct consequence of Lemma 6 in [28, p. 123]. Lemma (18) was proved in [25] for the operator P and, therefore, is valid for the operator \(P_n\), too. Finally, Lemma 19 corresponds to Proposition 4.6 in [26, p. 102].
We now have all the ingredients to provide the proof of Theorem 16.
Proof
-
(i)
Let \(n\in \mathbb {N}\). It follows from Lemma 18 and Definition 7 that the operator \(P_n\) is bounded, demicontinuous and monotone and, therefore, it satisfies condition (12). The existence of a unique solution of Problem \(\mathcal{Q}\) is now a direct consequence of Theorem 9.
-
(ii)
Let \({\varvec{u}},\,{\varvec{v}}_1,\, {\varvec{v}}_2\in V\). We use definition (69) and the trace inequality (56) to see that
$$\begin{aligned} \varphi ({\varvec{u}},{\varvec{v}}_1)-\varphi ({\varvec{u}},{\varvec{v}}_2)\le \Vert F\Vert _{L^2(\varGamma _3)}\Vert {\varvec{v}}_1-{\varvec{v}}_2\Vert _{L^2(\varGamma _3)^d}\le \Vert \gamma \Vert \Vert F\Vert _{L^2(\varGamma _3)}\Vert {\varvec{v}}_1-{\varvec{v}}_2\Vert _V, \end{aligned}$$which shows that condition (17) is satisfied. Assume now that \(\{{\varvec{u}}_n\}\), \(\{{\varvec{v}}_n\}\) are sequences of V such that \({\varvec{u}}_n\rightharpoonup {\varvec{u}}\) and \({\varvec{v}}_n\rightarrow {\varvec{v}}\ \text{ in }\ V\). Then, using the compactness of the trace we have
$$\begin{aligned}&\varphi ({\varvec{u}}_n,{\varvec{v}}_n)-\varphi ({\varvec{u}}_n,{\varvec{u}}_n)=\int _{\varGamma _3} F(v_{n\nu }^+-u_{n\nu }^+)\,da\\&\quad \rightarrow \int _{\varGamma _3}F(v_{\nu }^+-u_{\nu }^+)\,da=\varphi ({\varvec{u}},{\varvec{v}})-\varphi ({\varvec{u}},{\varvec{u}}), \end{aligned}$$which shows that condition (18) holds. Moreover, Lemma 17 guarantees that condition (19) is satisfied, too.
Let \({\varvec{v}}\in K\), \(n\in \mathbb {N}\) and let \({\varvec{v}}_n=\alpha _n{\varvec{v}}\) where
Then, using the definitions of the sets \(K_n\) and K it is easy to see that \({\varvec{v}}_n\in K_n\). We now use Lemma 18 and Definition 7 to see that \(P_n{\varvec{v}}_n=0_{V^*}\). On the other hand, definition (86) and assumption (82) show that \(\alpha _n\rightarrow 1\). Therefore, since \({\varvec{v}}_n=\alpha _n{\varvec{v}}\) we deduce that \({\varvec{v}}_n\rightarrow {\varvec{v}}\) in V. We conclude from here that condition (14) is satisfied.
Let \({\varvec{v}}\in V\), \({\varvec{w}}\in V\) and let \(n\in \mathbb {N}\). Then, using the definitions (80) and (84) combined with inequality (85), assumption (73)(a) and (56) we find that
It follows from here that
Consider now a sequence \(\{{\varvec{u}}_n\}\) of elements of V. We write (87) with \({\varvec{v}}={\varvec{u}}_n\) then we use (82) to deduce that
The convergence (88) combined with the pseudomonotonicity of P shows that condition (38) holds and, by Lemma 11 it follows that (16)(a) holds, too. On the other hand, condition (16)(b) is a consequence of Lemma 18.
We conclude from above that conditions (14), (16), (17), (18) and (19) are satisfied. Moreover, recall that assumptions (57)–(64) imply conditions (4)–(9) with \(X=V\) and A, \(\varphi \), j, \({\varvec{f}}\) given by (68)–(71). We are in a position to use Theorem 10 in order to conclude the proof. \(\square \)
In addition to the mathematical interest in the convergence result in Theorem 10(ii), it is important from the mechanical point of view, since it provides the link between the weak solutions of two different models of contact. Indeed, Problem \(\mathcal{Q}_n\) describes the frictionless contact of an elastic material, with a deformable foundation covered by a crust. In contrast, Problem \(\mathcal{Q}\) describes the frictionless contact of a locking material with a rigid-deformable foundation covered by a crust. Note that Problem \(\mathcal{Q}\) is nonsmooth since it contains unilateral constraints both in the constitutive law and the contact boundary condition. In contrast, Problem \(\mathcal{Q}_n\) is smoother, since these constraints have been removed. Theorem 10 shows that we can approach the solution of the nonsmooth contact problem \(\mathcal{Q}\) by the solution of a smoother contact problem \(\mathcal{Q}_n\), as the penalty parameter \(\lambda _n\) converges to zero and the convergences (82) hold. The novelty of this result arises from the fact that it guarantees the convergences of the solution even when the penalty problems are constructed with the parameters \(g_n\) and \(k_n\), different from g and k, provided that (82) holds. This is important in applications, since the data g and k are obtained from experiments and, therefore, their value can slightly vary due to the error measurements.
References
Baiocchi, C., Capelo, A.: Variational and Quasivariational Inequalities: Applications to Free-Boundary Problems. Wiley, Chichester (1984)
Brézis, H.: Problèmes unilatéraux. J. Math. Pures Appl. 51, 1–168 (1972)
Capatina, A.: Variational Inequalities and Frictional Contact Problems. Springer, New York (2014)
Clarke, F.H.: Optimization and Nonsmooth Analysis. Wiley Interscience, New York (1983)
Denkowski, Z., Migórski, S., Papageorgiou, N.S.: An Introduction to Nonlinear Analysis: Theory. Kluwer Academic/Plenum Publishers, Boston (2003)
Denkowski, Z., Migórski, S., Papageorgiou, N.S.: An Introduction to Nonlinear Analysis: Applications. Kluwer Academic/Plenum Publishers, Boston (2003)
Ekeland, I., Temam, R.: Convex Analysis and Variational Problems. North-Holland, Amsterdam (1976)
Glowinski, R., Lions, J.L., Trémolières, R.: Numerical Analysis of Variational Inequalities. North-Holland, Amsterdam (1981)
Han, W.: Numerical analysis of stationary variational-hemivariational inequalities with applications in contact mechanics. Mathe. Mech. Solids. 23, 279–293 (2018)
Han, W., Sofonea, M.: Numerical analysis of hemivariational inequalities in contact mechanics. Acta Numer., to appear
Han, W., Migórski, S., Sofonea, M.: A class of variational-hemivariational inequalities with applications to frictional contact problems. SIAM J. Math. Anal. 46, 3891–3912 (2014)
Han, W., Sofonea, M., Barboteu, M.: Numerical analysis of elliptic hemivariational inequalities. SIAM J. Numer. Anal. 55, 640–663 (2017)
Han, W., Sofonea, M., Danan, D.: Numerical analysis of stationary variational-hemivariational inequalities. Numer. Math. 139, 563–592 (2018)
Hu, R., et al.: Equivalence results of well-posedness for split variational-hemivariational inequalities. J. Nonlinear Convex Anal., to appear
Kikuchi, N., Oden, J.T.: Contact Problems in Elasticity: A Study of Variational Inequalities and Finite Element Methods. SIAM, Philadelphia (1988)
Lu, J., Xiao, Y.B., Huang, N.J.: A Stackelberg quasi-equilibrium problem via quasi-variational inequalities. Carpathian J. Math. 34, 355–362 (2018)
Li, W., et al.: Existence and stability for a generalized differential mixed quasi-variational inequality. Carpathian J. Math. 34, 347–354 (2018)
Migórski, S., Ochal, A., Sofonea, M.: Nonlinear Inclusions and Hemivariational Inequalities: Models and Analysis of Contact Problems. Springer, New York (2013)
Migórski, S., Ochal, A., Sofonea, M.: A class of variational-hemivariational inequalities in reflexive Banach spaces. J. Elast. 12, 151–178 (2017)
Migórski, S., Zeng, S.D.: Penalty and regularization method for variationalhemivariational inequalities with application to frictional contact. Z. Angew. Math. Phys. 98, 1503–1520 (2018)
Naniewicz, Z., Panagiotopoulos, P.D.: Mathematical Theory of Hemivariational Inequalities and Applications. Marcel Dekker Inc., New York (1995)
Panagiotopoulos, P.D.: Hemivariational Inequalities, Applications in Mechanics and Engineering. Springer, Berlin (1993)
Peng, Z., Kunish, K.: Optimal control of elliptic variational-hemivariational inequalities. J. Optim. Theory Appl. 178, 1–25 (2018)
Shu, Q.Y., Hu, R., Xiao, Y.B.: Metric characterizations for well-posedness of split hemivariational inequalities. J. Ineq. Appl. 2018, 190 (2018). https://doi.org/10.1186/s13660-018-1761-4
Sofonea, M.: A nonsmooth static frictionless contact problem with locking materials. Anal. Appl. 6, 851–874 (2018)
Sofonea, M., Matei, A.: Mathematical Models in Contact Mechanics. Cambridge University Press, Cambridge (2012)
Sofonea, M., Migórski, S.: A class of history-dependent variational-hemivariational inequalities. Nonlinear Differ. Equ. Appl. 38, 23 (2016). https://doi.org/10.1007/s00030-016-0391-0
Sofonea, M., Migórski, S.: Variational-Hemivariational Inequalities with Applications, Pure and Applied Mathematics. Chapman & Hall/CRC Press, Boca Raton-London (2018)
Sofonea, M., Pătrulescu, F.: Penalization of history-dependent variational inequalities. Eur. J. Appl. Math. 25, 155–176 (2014)
Sofonea, M., Matei, A., Xiao, Y.B.: Optimal control for a class of mixed variational problems, submitted
Sofonea, M., Migórski, S., Han, W.: A penalty method for history-dependent variational-hemivariational inequalities. Comput. Math. Appl. 75, 2561–2573 (2018)
Sofonea, M., Xiao, Y.B.: Fully history-dependent quasivariational inequalities in contact mechanics. Appl. Anal. 95, 2464–2484 (2016)
Sofonea, M., Xiao, Y.B.: Boundary optimal control of a nonsmooth frictionless contact problem. Comput. Math. Appl. (2019). https://doi.org/10.1016/j.camwa.2019.02.027
Sofonea, M., Xiao, Y.B., Couderc, M.: Optimization problems for elastic contact models with unilateral constraints. Z. Angew. Math. Phys. 70, 1 (2019). https://doi.org/10.1007/s000033-018-1046-2
Sofonea, M., Xiao, Y.B., Couderc, M.: Optimization problems for a viscoelastic frictional contact problem with unilateral constraints, submitted
Wang, Y.M., et al.: Equivalence of well-posedness between systems of hemivariational inequalities and inclusion problems. J. Nonlinear Sci. Appl. 9, 1178–1192 (2016)
Xiao, Y.B., Huang, N.J.: Browder-Tikhonov regularization for a class of evolution second order hemivariational inequalities. J. Glob. Optim. 45, 371–388 (2009)
Xiao, Y.B., Huang, N.J., Lu, J.: A system of time-dependent hemivariational inequalities with Volterra integral terms. J. Optim. Theory Appl. 165, 837–853 (2015)
Xiao, Y.B., Sofonea, M.: On the optimal control of variational-hemivariational inequalities. J. Math. Anal. Appl, https://doi.org/10.1016/j.jmaa.2019.02.046, to appear
Xiao, Y.B., Yang, X.M., Huang, N.J.: Some equivalence results for well-posedness of hemivariational inequalities. J. Glob. Optim. 61, 789–802 (2015)
Zeng, B., Liu, Z., Migórski, S.: On convergence of solutions to variational-hemivariational inequalities. Z. Angew. Math. Phys. (2018). https://doi.org/10.1007/s00033-018-0980-3
Zeng, S.D., Migórski, S.: Noncoercive hyperbolic variational inequalities with applications to contact mechanics. J. Math. Anal. Appl. 455, 619–637 (2017)
Zeidler, E.: Nonlinear Functional Analysis and Applications II A/B. Springer, New York (1990)
Acknowledgements
This research was supported by the National Natural Science Foundation of China (11771067), the Applied Basic Project of Sichuan Province (2019YJ0204) and the European Union’s Horizon 2020 Research and Innovation Programme under the Marie Sklodowska-Curie Grant Agreement No 823731 CONMECH.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Xiao, Yb., Sofonea, M. Generalized Penalty Method for Elliptic Variational–Hemivariational Inequalities. Appl Math Optim 83, 789–812 (2021). https://doi.org/10.1007/s00245-019-09563-4
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00245-019-09563-4
Keywords
- Variational–hemivariational inequality
- Clarke subdifferential
- Penalty method
- Convergence
- Frictional contact