
Abstract
Whilst a range of animals have been shown to respond behaviourally to components of the Earth’s magnetic field, evidence of the value of this sensory perception for small animals advected by strong flows (wind/ocean currents) is equivocal. We added geomagnetic directional swimming behaviour for North Atlantic loggerhead turtle hatchlings (Caretta caretta) into a high-resolution (1/4°) global general circulation ocean model to simulate 2,925-year-long hatchling trajectories comprising 355,875 locations. A little directional swimming (1–3 h per day) had a major impact on trajectories; simulated hatchlings travelled further south into warmer water. As a result, thermal elevation of hatchling metabolic rates was estimated to be between 63.3 and 114.5% after 220 days. We show that even small animals in strong flows can benefit from geomagnetic orientation and thus the potential implications of directional swimming for other taxa may be broad.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
The use of geomagnetic information has been widely implicated in animal navigation and is supported by evidence from several species showing an ability to respond behaviourally to changes in the Earth’s magnetic field (e.g. see review by Wiltschko and Wiltschko 2005). Geomagnetic information can potentially be used to derive positional and navigational cues since magnetic inclination angle and field intensity are particularly pervasive features of the Earth’s magnetic field which vary predictably over the majority of the Earth’s surface (e.g. see Lohmann et al. 2008). For example, orientation responses to manipulated changes in magnetic inclination angle and field intensity have been shown for hatchling sea turtles (Lohmann et al. 2001; Merril and Salmon 2010; Putnam et al. 2011), satellite-tracked adult sea turtles (Luschi et al. 2007), lobsters (Boles and Lohmann 2003) and birds (e.g. see review by Wiltschko and Wiltschko 1996). Whilst establishing the value of geomagnetic orientation for larger organisms under natural conditions is possible through direct tracking (Luschi et al. 2007), this is challenging for smaller species, or smaller development stages of large taxa, since high-resolution direct tracking of small individuals for extended periods is generally not feasible due to size constraints of transmitters.
Even very small organisms only mm or cm in size may move very large distances (10, 100 or 1,000 s of km). For example, many small organisms may be carried long distances by a moving environment, i.e. air flows for aerial animals (and plants) and currents for aquatic species. Whilst such small organisms are notoriously difficult to track directly, it is known that they can employ mechanisms to help favourable dispersal. For example, plants may release seeds, and insects may chose to fly when winds are favourable (Nathan et al. 1999; Jongejans et al. 2007; Brattström et al. 2008). In addition, it has been suggested that organisms may modify their behaviour whilst being carried along by their environment (i.e. air/water) and thereby impact their migrations and destination. The two main mechanisms for altering trajectories are to correct for drift displacements by changing heading (Chapman et al. 2010) or by vertical movement into different (more favourable) horizontal water or air flows (Kristiansen et al. 2009). Over large spatial scales (both in air and in water), directional movement in response to the ambient geomagnetic field may, in theory, help animals to arrive at more favourable destinations. This scenario has been implicated for one group of widespread and paradigmatic long-distance ocean travellers, the sea turtles.
For North Atlantic loggerhead turtle hatchlings (Caretta caretta), elegant laboratory experiments have revealed directional swimming in response to two components of the geomagnetic field, inclination and intensity (Lohmann et al. 2001; Merrill and Salmon 2010; Putman et al. 2011). Together, these components have been proposed to provide a bicoordinate map operating across ocean basins. These laboratory experiments have shown that, broadly speaking, hatchlings adopt a swimming direction that would aid with entrainment in the North Atlantic gyre, and this use of geomagnetic navigational signposts has been proposed to help post-hatchlings stay within favourable conditions. Direct testing of this idea is, however, difficult since it is impossible to directly track hatchlings for extended periods and to have a group of control animals and experimentally disturbed animals (e.g. using the classic set-up of placing magnets on the body to disrupt perception of the geomagnetic field). Hence, alternative approaches are needed to test the impact of directional swimming by hatchling turtles.
We calculate a 6 × 2-year “super-ensemble” of passively drifting (from hereafter referred to as inert particle) trajectories from the surface current fields of a state-of-the-art ocean model hindcast. By placing realistic swimming behaviours into inert particles, we investigate whether directional swimming may be used profitably by sea turtles, not simply when they are large powerful swimmers, but also during their first year of life, when they enter the sea as small hatchlings.
Materials and methods
Ocean model
The ocean model is based on NEMO, the Nucleus for European Modelling of the Ocean. NEMO is a European modelling community effort to advance ocean modelling for the ocean climate research and operational oceanography through a common flexible modelling framework. The version of NEMO featured in this study was developed at the National Oceanography Centre, Southampton. We use fields from a global 1/4° implementation that resolves both the mesoscale variability of energetic currents, such as the Gulf Stream, and oceanic eddies of radii exceeding around 100 km. In a hindcast spanning 1958–2007 (run ORCA025-N206), the model is forced with atmospheric conditions that combine 6-hourly air temperature, humidity and wind fields from the ERA40 reanalysis (Uppala et al. 2005) with climatological radiation and freshwater fluxes from the CORE data set (Large and Yeager 2009). Using this configuration of NEMO, an initial hindcast of 1958–2001 compared favourably with observations of recent Atlantic variability (Grist et al. 2010).
Particle tracking
An efficient analytical method for computing large ensembles of offline trajectories was developed in the 1990s (Blanke et al. 2001), and the method has been specifically customised as the ARIANE software (http://stockage.univ-brest.fr/~grima/Ariane/), for use with NEMO data sets. The trajectories may be based on time-varying currents and are characterised by age (since release), depth (whether or not the particles are buoyant) and property (temperature and salinity). The ARIANE method was recently used in a similar study, to investigate migration of the European Eel across the North Atlantic, and is further described in that paper (Bonhommeau et al. 2009). We specify 325 particle release sites located in a grid 10–100 km offshore along the SE coast of Florida between latitudes of 25–27°N. Grid spacing was 10 km, and all start points were located within the Gulf Stream. Start date for the trajectory simulations was at the end of September, coinciding with peak hatchling emergence from beaches on SE Florida (Ehrhart and Witherington 1987). Release sites were selected to cover the range of positions that hatchlings are expected to reach offshore following the initial swimming frenzy and post-frenzy period (Wyneken et al. 2008). Particles were constrained to remain at the uppermost NEMO depth level of 0.5 m as post-hatchlings cannot dive deeply due to their positive buoyancy (Milsom 1975). Advected by a surface velocity field that is updated every 30 days (as a monthly mean field), particles are tracked for 2 years in all cases. Positions of particles and associated water temperature are recorded every 5 days. Trajectory ensembles were obtained using the same 325 release sites each year between 2000 and 2005, producing a 6 × 2-year “super-ensemble” of Lagrangian (drifting particle) trajectories. Particles following trajectories with no added behaviour are hereafter referred to as “inert particles”.
Inserting swimming behaviour into particles
All behaviour computations and analysis of model outputs were completed in R (R Development Core Team 2009). Swimming behaviour was parameterised based on empirical results reported for neonate loggerhead hatchlings from SE Florida. From hereafter, we use the term hatchling/neonate to refer to individuals (<1 week old) and post-hatchling to refer to individuals (>1 week old). To model the impact of post-hatchling swimming behaviour on movement trajectories, we first assumed a swimming speed of 1.13 km h−1. This is the mean value reported during active swimming for loggerhead turtle hatchlings (Salmon and Wyneken 1987; Witherington 1991) and was used to assess the impact of 1, 2 and 3 h of daily directional swimming (h d−1). Swimming activity of hatchlings has only been monitored during their first week of swimming, during which period the amount of daily swimming does not drop below 7 h day−1 (Wyneken et al. 2008). Hence, the values for daily swimming that we assumed (1–3 h day−1) may be a conservative estimate. Additionally, the swimming speed of turtles will increase as they grow. So again the value we assumed, which is based on neonate hatchlings, may be a conservative estimate for loggerhead turtles during their first year of life.
Swimming direction was parameterised based on the mean orientation responses of 29 hatchlings from SE Florida exposed to the magnetic inclination and intensity fields found off the coast of NE Florida (Lohmann et al. 2001). The next point in the North Atlantic gyre for which empirical data of this nature exist is located off SW Europe. Since there are currently no data on how orientation responses change during the ontogeny of post-hatchlings or between these two regions, we chose to parameterise swimming direction based on the location reached by the majority of inert particles after 6 months of drifting. This location corresponded to a region off the coast of North Carolina where particle trajectories start to divide and either remain in the gyre or drift towards Northern Europe. Based on the results of Lohmann et al. (2001), we assumed that the mean heading of post-hatchlings at this location would be roughly directed towards the centre of the North Atlantic gyre to prevent advection to Northern Europe. So to achieve this parameterisation, we simply added 45° to each of the 29 hatchling headings reported by Lohmann et al. (2001). In this way, we produced a mean heading of 163° (i.e. directed towards the centre of the gyre) and circular standard deviation of 76°. This distribution was used to model the orientation behaviour of post-hatchlings. We are fully aware that this is only a first step in accurately defining the swimming behaviour of hatchlings, and more empirical values for swim direction and speed will lead to better parameterisation. Our key objective is simply to take reasonable estimates for limited directional swimming by post-hatchlings to see whether this impacts their dispersal.
Behaviour simulations were run from the same 325 release sites as the 6-year NEMO ensemble. To insert swimming behaviour into particles at day 5 and for each subsequent 5-day interval during 1 year, we randomly selected a swimming direction from the distribution detailed above and assumed a swimming speed of 1.13 km h−1. In this way, the particles with behaviour (i.e. simulated hatchlings) were “nudged” to a new location. For the current vector for the next 5 days, we selected the vector of the closest inert particle within the NEMO ensemble. The resulting position was then again nudged with a new swimming direction from the distribution detailed above and again given a swimming speed of 1.13 km h−1. In this way, the trajectories of “particles with behaviour” were derived. For each 5-day position for the particles with behaviour, ambient sea surface temperature (SST) was determined from the temperature of the closest inert particle in the full 6 × 2-year NEMO ensemble that corresponded to the same month of the particle with behaviour. To determine the influence of 1, 2 and 3 h day−1 directional swimming, behaviour simulations were compared with the first year of drift from the inert particle simulations generated in the full NEMO ensemble.
Inert particle trajectories were run for 2 years, whilst “particles with behaviour” were run for only 1 year, since we needed to ensure that the domain of surface current vectors and associated temperatures covered the entire area into which “particles with behaviour” might move. If we had instead run both sets of trajectory for only 1 year, then some of the “particles with behaviour” would move beyond the area covered by the inert particles and hence we would not have baseline current vector data. We chose 1 year for the runs of “particles with behaviour” as this revealed the fate of particle simulations during this critical period, i.e. whether they drifted to Northern Europe or remained in the North Atlantic gyre. Mann–Whitney tests were used to determine whether particle latitudes and temperatures arising from different behaviour scenarios were significantly different after c. ¼ year, ½ year and 1 year.
Physiological impacts of thermal environment
The mean latitude and ambient SST experienced every 5 days by each inert particle and each particle with 1, 2 and 3 h day−1 directional swimming were calculated and ambient SST data smoothed using a monthly moving average function. Using the mean ambient SST every 5 days for each particle, mean relative metabolic rate was estimated based on the published respirometry-derived relationship between juvenile loggerhead turtle metabolic rate and water temperature (Hochscheid et al. 2004): ln VO2 (in ml O2· min−1) = −2.87 + (0.168 × SST) − k. Based on the size of the smallest individual from which this relationship was derived, k was set to 0.024. Wilcoxon tests were used to determine whether metabolic rates during the first year differed significantly with different behaviour scenarios.
Results
Particle trajectories
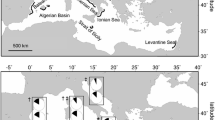
A total of 1,950 2-year-long Lagrangian trajectories with no behaviour were computed which comprised a total of 284,700 inert particle locations and associated current vectors and water temperatures. The general pattern of trajectories broadly reflected the known currents in the region: Particles tended to be carried rapidly NE in the Gulf Stream before streaming eastwards in the North Atlantic Current with some being carried southwards into the Sargasso Sea and others towards Northern Europe. A further 975 1-year-long behaviour trajectories were computed (325 with 1, 2, then 3 h day−1 of directional swimming), comprising another 71,175 particle locations (Fig. 1).

Paths of a random sample of 50 inert 1-year-long particle trajectories (black) and random sample of 50 1-year-long particle trajectories with 3 h day−1 directional swimming behaviour (red). The major current systems that border the Sargasso Sea during the first year of drift are indicated (i-Gulf Stream; ii-North Atlantic Current). Inset (bottom right) shows the mean orientation of hatchlings assumed off the coast of North Carolina (this was adapted from empirical results of 29 hatchlings reported by Lohmann et al. 2001). This distribution was used to input behaviour into particles by picking a heading at random from this distribution for each 5-day period of active swimming (color figure online)
Impacts of geomagnetic orientation on trajectories
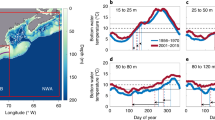
Adding directional swimming to the particles had pronounced impacts on their trajectories (Fig. 2a). The mean latitude of particles initially increased with directional swimming, i.e. during days 10–25, particles with 3 h day−1 directional swimming were 1.34–0.15° further north than inert particles. This result occurred because during the first 25 days, swimming tended to move particles into the strongest northerly flows of the Gulf Stream quicker than inert particles and hence “particles with behaviour” travelled north faster. After 1 month (30 days after particle release), “particles with behaviour” have travelled through the strongest northerly flows and a mean SSE swimming orientation starts to lead these particles along more southerly trajectories than inert particles, i.e. by day 30, particles with 3 h day−1 directional swimming are 0.13° further south than inert particles. Particles with behaviour travelled progressively further south for the rest of the year with the magnitude of this effect increasing with the amount of daily swimming behaviour.

a The mean latitude for particles with no behaviour and 1, 2 and 3 h day−1 directional swimming. Mean latitude initially increased with increasing directional swimming, i.e. after 25 days, particles with 3 h day−1 directional swimming were 0.15° further north than inert particles. This occurred because “particles with behaviour” arrived earlier in the strongest northerly flows of the Gulf Stream. After 30 days, particles had travelled through these strongest northerly flows, and directional swimming then led “particles with behaviour” to be progressively further south than inert particles with the magnitude of this effect increasing with the amount of daily swimming behaviour. b The mean ambient SST through which particles traversed increased as particles with behaviour travelled more southerly. Ambient SST started to increase after around 100 days which corresponded to the first winter following particle release at the end of September (day 0). Standard error bars are plotted at 180 and 365 days (b) and also for 90 days (a)
By December (90 days after particle release), the mean (±SE) latitude of particles with 0, 1, 2 and 3 h day−1 of directional swimming behaviour was 37.01°N (±0.08), 36.44°N (±0.17), 36.24°N (±0.18) and 35.85°N (±0.19), respectively. So particles with 1–3 h day−1 of swimming behaviour were on average around 63, 86 and 129 km further south than inert particles. These differences in the mean latitude of particles with behaviour and the inert particles were all significant (z < −4.15, p < 0.001 in all three cases). By March (180 days after particle release), these differences had become magnified: the mean latitude of particles with 0, 1, 2 and 3 h day−1 of directional swimming behaviour was 37.58°N (±0.09), 36.89°N (±0.21), 36.18°N (±0.23) and 35.30°N (±0.24), so on average, particles with 1–3 h day−1 behaviour were around 77, 156 and 254 km further south than inert particles. By day 365, these differences were greater still with the mean latitudes of particles with 1, 2 and 3 h day−1 of directional swimming behaviour being around 179, 347 and 520 km further south than inert particles. In all cases, these differences in mean latitude after 180 and 365 days between particles with behaviour versus inert particles were again highly significant (z < −3.04, p < 0.005 in all cases).
As a consequence of these “particles with behaviour” travelling through more southerly latitudes, their ambient SST was higher than for inert particles (Fig. 2b). This thermal elevation started to become apparent in January (110 days after particle release) and peaked during May (215 days after particle release) when the mean ambient water temperature was 1.5, 2.2 and 2.7°C higher than the mean SST for inert particles (18.7°C) with 1, 2 and 3 h day−1 of swimming, respectively. Again these differences in the mean SST experienced by particles with behaviour versus inert particles were highly significant (z < −2.68, p < 0.05 in all cases). So in short, directional swimming led to particles travelling on more southerly trajectories and experiencing warmer water than inert particles, and the magnitude of this effect increased with the amount of daily swimming.
Physiological impacts of thermal environment
The thermal elevation of particles with directional swimming led to a calculated increase in metabolic rate, since metabolic rate increased as a function of water temperature. Again the increase in metabolic rate started to become pronounced during the first winter after particle release. For example, by the end of January, the mean metabolic rate of particles showing 1, 2 and 3 h day−1 of directional swimming was 9.5, 26.5 and 39.3%, respectively, above the mean metabolic rate of inert particles with no swimming (Fig. 3a). This difference peaked in May when particles were approximately 220 days old, and there was a 63.3–114.5% increase in metabolic rate with 1–3 h day−1 of swimming. When the integrated metabolic rate was calculated over the full year of simulated trajectories, directional swimming equated to an increase of 9.3, 17.0 and 23.3% in metabolic rate with 1, 2 and 3 h day−1 of swimming (Fig. 3b). Mean and integrated metabolic rates over 1 year were significantly higher for particles with 1, 2 and 3 h day−1 of behaviour versus inert particles (z ≥ 7.2, p < 0.001 in all cases).

a Relative difference in mean metabolic rate (MR) for particles with 1, 2 and 3 h day−1 directional swimming compared to particles with no behaviour. MR started to increase during the first winter (circa days 80–110) following release at the end of September (day 0) and was most pronounced (63.3–114.5% higher with 1–3 h day−1, respectively) in May when particles were approximately 225 days old. b Relative cumulative difference in mean metabolic rate. During February to April (circa days 135–205 with 1–3 h day−1 directional swimming, respectively), particles start to experience a cumulative increase in MR which then starts to level off in the summer ending with an overall increase of 9.3, 17.0 and 23.3% in MR with 1, 2 and 3 h day−1 directional swimming, respectively
Discussion
Whilst it is now well established that loggerhead turtle hatchlings can respond behaviourally to changes in magnetic inclination and intensity (Lohmann et al. 2001; Merrill and Salmon 2010; Putman et al. 2011), it remains equivocal whether such information could only be used profitably by adult turtles when they are large and powerful swimmers able to swim strongly relative to currents (e.g. Luschi et al. 2007; Mencacci et al. 2010). Set against this backdrop, our results suggest that even relatively limited amounts of directional movement by small post-hatchling sea turtles can influence their trajectory and help individuals to stay within favourable warm water in the North Atlantic subtropical gyre and avoid being advected into cooler more northerly areas where growth and survival are jeopardised.
In addition to our main finding that directional swimming helps post-hatchlings remain at safe latitudes, there may be further advantages. Metabolic rate has been shown to be positively correlated with the growth and fitness potential of other marine ectotherms such as fish (Metcalfe et al. 1995). For loggerhead turtle hatchlings, growth rates in captivity have been shown to increase significantly in higher water temperatures between 14 and 31°C (Hughes 1974; Owens and Ralph 1978) and likewise food intake rates have been shown to increase for juvenile loggerheads kept at temperatures ranging from 15 to 25°C (Hochscheid et al. 2004). Since these temperature ranges correspond to the range from which our metabolic rates were derived, we infer that warmer temperatures encountered in the North Atlantic may produce faster growth rates if food is not limited. Lavage samples have revealed that the diet of SE Florida post-hatchlings is predominantly comprised of members of the Sargassum community and small pleustonic and neustonic organisms which reside at the air–sea interface and are not associated with Sargassum (Witherington 2002). Whilst post-hatchlings show a strong preference for pleuston and neuston (Witherington 2002), knowledge of the distribution and abundance of these organisms which are heavily influenced by wind dispersal is sparse. Consequently, whilst higher SST could potentially be advantageous to post-hatchlings, due to a lack of data on distribution of their prey, it is currently unclear whether thermal elevation would translate into fitness benefits beyond reduced exposure to northerly latitudes and the risks of cold stunning.
The eddy-permitting version of NEMO, on which these results are based, provides a major advance over earlier studies of particle trajectories at basin scales (Hays and Marsh 1997). Such studies relied on model simulations of coarser resolution, incapable of resolving the mesoscale variability in ocean currents that strongly influences the timescales and spreading of passively drifting particles. The eddy-permitting NEMO simulation reveals rich mesoscale variability, in contrast to a lower resolution counterpart (Marsh et al. 2010). Indeed, the trajectories modelled by NEMO show similar patterns to those evident in the trajectories of satellite-tracked buoys (http://www.aoml.noaa.gov/envids/gld/). We are therefore confident that our improved “eddy-permitting” trajectories are a more suitable starting point for the study of swimming behaviour.
Our parameterisation of swimming behaviour was based on the available data for neonate hatchlings weighing around 20 g (4.5 cm carapace length) and as such is anticipated to be conservative since swimming performance will change considerably during a year. For example, 1- to 1.5-year-old loggerhead turtles (mean size: 31.6 cm carapace length) followed for up to 4 h after release from a captive head-starting programme averaged speeds of 1.88 km d−1 (Nagelkerken et al. 2003). Clearly, increased swimming speeds will make the difference in the trajectories of inert particles versus “particles with directional behaviour” even more acute. Whilst hatchlings swim almost continuously during the initial 24-h swimming frenzy, declining to c.7 h day−1 by the sixth day (Wyneken et al. 2008), there are currently no data on daily swimming activity beyond this period. Nonetheless, whilst the strength of hatchlings will improve as body size increases, swimming duration can be expected to decline beyond 7 h day−1 once hatchlings escape the predator-rich coastal zone and reach offshore waters where favourable dispersal/development conditions exist. As such, travel distances based on 1–3 h day−1 of directional swimming and mean swimming speed of neonates provide the best conservative estimates until better data become available.
Whilst the orientation responses of hatchlings exposed to magnetic intensity and inclination values corresponding to the Western and NE boundary of the North Atlantic gyre have been parameterised, it is unclear how orientation responses change as hatchlings travel between these two points. Adopting a single mean heading during the first year of life likely underestimates the ability of post-hatchlings to control their destiny by responding behaviourally to changes in the Earth’s magnetic field. However, this approach forms a basis for future work as better data/knowledge of post-hatchling swimming behaviour becomes available. By focussing on the first year of life, we cover the critical period when post-hatchlings risk advection to northern Europe and reduced problems associated with the fact behaviour can only be parameterised from experiments conducted on neonate hatchlings, and it is unknown how hatchlings modify their behaviour throughout their ontogeny. Directional swimming is, however, thought to benefit juvenile turtles during the full transatlantic journey, initially by helping post-hatchlings to remain in the favourable development habitat of the North Atlantic and later to return to coastal habitats off the coast of the USA. It is thus hoped that with emerging data sets (e.g. Fuxager et al. 2011), simulations of this nature can be further refined through better behaviour parameterisation and extended beyond the first year. Nonetheless, despite current limitations, our results clearly demonstrate that a very limited amount of swimming can have a big impact on drift scenarios.
In addition to swimming behaviour, the other factor that clearly dictates an animal’s trajectory in the ocean is the strength and direction of the current. Here, it should be borne in mind that our simulations started in the very strong flows of the Gulf Stream. This is one of the strongest of the major ocean currents. Our findings that even in these high flows, post-hatchlings can influence their trajectory potentially have much broader implications as elsewhere in the world’s oceans where flows are less, the ability of post-hatchlings to influence their movement is likely to be even greater. The swimming ability of loggerhead hatchlings that we used is comparable to other sea turtle hatchlings species (Chung et al. 2009). The combination of conservative estimates of swim speed and high current flows in our study area means that our results are likely to provide a conservative impression of the ability of hatchling sea turtles around the world to influence their trajectory through geomagnetic orientation.
There are a large number of small animals in the oceans that swim actively, yet cannot be tracked, such as fish larvae, small cephalopods and crustacean plankton. Swim speeds of these larvae can be considerably higher than those of loggerhead hatchlings (e.g. Fisher 2005), suggesting that other larval species will be able to influence their destination through active swimming. Placing realistic behaviours into particle trajectories from high-resolution ocean models provides an opportunity to resolve the potential impacts that active swimming by these groups may have. For another transatlantic migrant, the critically endangered European Eel, Anguilla anguilla, deriving realistic dispersion patterns in this way is now considered a management priority (Bonhommeau et al. 2010). This technique may also serve to identify the potential spread of invasive marine species as they emanate from points of introduction into new environments (Cowen et al. 2006). The coupling of accurate parameterisation of organism swimming behaviour and high-resolution ocean general circulation models is thus anticipated to have significant application in the management of a range of species of conservation concern.
References
Blanke B, Speich S, Madec G, Doos K (2001) A global diagnostic of interocean mass transfers. J Phys Oceanogr 31(6):1623–1632
Boles LC, Lohmann KJ (2003) True navigation and magnetic maps in spiny lobsters. Nature 421(6918):60–63
Bonhommeau S, Blanke B, Tréguier A, Grima N, Rivot E, Vermard Y, Greiner E, Le Pape O (2009) How fast can the European eel (Anguilla anguilla) larvae cross the Atlantic ocean? Fish Oceanogr 18(6):371–385
Bonhommeau S, Castonguay M, Rivot E, Sabatié R, Le Pape O (2010) The duration of migration of Atlantic Anguilla larvae. Fish Fish 11(3):289–306
Brattström O, Kjellén N, Alerstam T, Åkesson S (2008) Effects of wind and weather on red admiral, Vanessa atalanta, migration at a coastal site in southern Sweden. Anim Behav 76(2):335–344
Chapman JW, Nesbit RL, Burgin LE, Reynolds DR, Smith AD, Middleton DR, Hill JK (2010) Flight orientation behaviors promote optimal migration trajectories in high-flying insects. Science 327(5966):682–685
Chung FC, Pilcher NJ, Salmon M, Wyneken J (2009) Offshore migratory activity of hawksbill turtle (Eretmochelys imbricata) hatchlings, II. Swimming gaits, swimming speed, and morphological comparisons. Chel Cons Biol 8(1):35–42
Cowen RK, Paris CB, Srinivasan A (2006) Scaling of connectivity in marine populations. Science 311(5760):522–527
Ehrhart LM, Witherington BE (1987) Human and natural causes of marine turtle nest and hatchling mortality and their relationship to hatchling production on an important Florida nesting beach. Florida Game and Fresh Water Fish Commission, Nongame Wildlife Program Tech Rep No 1
Fisher R (2005) Swimming speeds of larval coral reef fishes: impacts on self-recruitment and dispersal. Mar Ecol Prog Ser 285:223–232
Fuxjager MJ, Eastwood BS, Lohmann KJ (2011) Orientation of hatchling loggerhead sea turtles to regional magnetic fields along a transoceanic migratory pathway. J Exp Biol 214:2504–2508
Grist JP, Josey SA, Marsh R, Good S, Coward AC, de Cuevas BA, Alderson SG, New AL, Madec G (2010) The roles of surface heat flux and ocean heat transport during four decades of Atlantic Ocean temperature variability. Ocean Dyn 60(4):771–790
Hays GC, Marsh R (1997) Estimating the age of juvenile loggerhead sea turtles in the north Atlantic. Can J Zool 75(1):40–46
Hochscheid S, Bentivegna F, Speakman JR (2004) Long-term cold acclimation leads to high Q10 effects on oxygen consumption of loggerhead sea turtles Caretta caretta. Physiol Biochem Zool 77(2):209–222
Hughes GR (1974) The sea turltes of south-east Africa II. The biology of the Tongaland loggerhead turtles Caretta caretta L. with comments on the leatherback turtle Dermochelys coriacea and the green turtle Chelonia mydas. L. in the study region. Oceanographic Research Institute Investigational Report, vol 36. Durban, South Africa
Jongejans E, Pedatella NM, Shea K, Skarpaas O, Auhl R (2007) Seed release by invasive thistles: the impact of plant and environmental factors. Proc R Soc London Ser B 274(1624):2457–2464
Kristiansen T, Jorgensen C, Lough R, Vikebo F, Fiksen Ø (2009) Modeling rule-based behavior: habitat selection and the growth-survival trade-off in larval cod. Behav Ecol 20(3):490–500
Large W, Yeager S (2009) The global climatology of an interannually varying air–sea flux data set. Clim Dyn 33(2):341–364
Lohmann K, Cain S, Dodge S, Lohmann C (2001) Regional magnetic fields as navigational markers for sea turtles. Science 294(5541):364–366
Lohmann KJ, Luschi P, Hays GC (2008) Goal navigation and island-finding in sea turtles. J Exp Mar Biol Ecol 356(1–2):83–95
Luschi P, Benhamou S, Girard C, Ciccione S, Roos D, Sudre J, Benvenuti S (2007) Marine turtles use geomagnetic cues during open-sea homing. Curr Biol 17(2):126–133
Marsh R, Desbruyères D, Bamber J, de Cuevas B, Coward A, Aksenov Y (2010) Short-term impacts of enhanced Greenland freshwater fluxes in an eddy-permitting ocean model. Ocean Sci 6(3):749–760
Mencacci R, De Bernardi E, Sale A, Lutjeharms JRE, Luschi P (2010) Influence of oceanic factors on long-distance movements of loggerhead sea turtles displaced in the southwest Indian Ocean. Mar Biol 157:339–349
Merrill MW, Salmon M (2010) Magnetic orientation by hatchling loggerhead sea turtles (Caretta caretta) from the Gulf of Mexico. Mar Biol 158(1):101–112
Metcalfe NB, Taylor AC, Thorpe JE (1995) Metabolic rate, social status and life-history strategies in Atlantic salmon. Anim Behav 49(2):431–436
Milsom WK (1975) Development of buoyancy control in juvenile Atlantic loggerhead turtles, Caretta caretta. Copeia 1975:758–762
Nagelkerken I, Pors LPJJ, Hoetjes P (2003) Swimming behaviour and dispersal patterns of headstarted loggerhead turtles Caretta caretta. Aquat Ecol 37:183–190
Nathan R, Safriel UN, Noy Meir I, Schiller G (1999) Seed release without fire in Pinus halepensis, a Mediterranean serotinous wind dispersed tree. J Ecol 87(4):659–669
Owens DW, Ralph CL (1978) The pineal-paraphyseal complex of sea turtles 1. Light microscopic descriptions. J Morphol 158(2):169–179
Putman NF, Endres CS, Lohmann CMF, Lohmann KJ (2011) Longitude perception and bicoordinate magnetic maps in sea turtles. Curr Biol 21(1):1–4
R Development Core Team (2009) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria. ISBN 3-900051-07-0, http://www.R-project.org
Salmon M, Wyneken J (1987) Orientation and swimming behavior of hatchling loggerhead turtles Caretta caretta L. during their offshore migration. J Exp Mar Biol Ecol 109(2):137–153
Uppala SM, Kållberg P, Simmons A, Andrae U, Bechtold VDC, Fiorino M, Gibson J, Haseler J, Hernandez A, Kelly G (2005) The ERA-40 re-analysis. Q J R Meteor Soc 131(612):2961–3012
Wiltschko W, Wiltschko R (1996) Magnetic orientation in Birds. J Exp Biol 199:29–38
Wiltschko W, Wiltschko R (2005) Magnetic orientation and magnetoreception in birds and other animals. J Comp Physiol A 191(8):675–693
Witherington BE (1991) Orientation of hatchling loggerhead turtles at sea off artificially lighted and dark beaches. J Exp Mar Biol Ecol 149(1):1–11
Witherington BE (2002) Ecology of neonate loggerhead turtles inhabiting lines of downwelling near a Gulf Stream front. Mar Biol 140:843–853
Wyneken J, Madrak SV, Salmon M, Foote J (2008) Migratory activity by hatchling loggerhead sea turtles (Caretta caretta L.): evidence for divergence between nesting groups. Mar Biol 156(2):171– 178
Acknowledgments
RS was funded through a PhD studentship awarded to GCH from the Natural Environment Research Council. Additional support was provided by the Climate Change Consortium for Wales (C3W). We are grateful to Jeff Blundell for assistance in the local implementation of the ARIANE trajectory software, to Christoph Weidemann for help with R code and to Andrew Coward and Beverly de Cuevas (NOC) for making model output from NEMO freely available. We thank Bruno Blanke and Nicolas Grima for freely providing ARIANE to the oceanographic community. NEMO is a state-of-the-art, portable modelling framework developed by a consortium of European institutions, namely the National Center for Scientific Research (CNRS), Paris, the UK Met Office (UKMO), Mercator-Ocean, and the UK National Environment Research Council (NERC). The latter development is funded under the NERC “Oceans 2025” programme.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by J. D. R. Houghton.
Rights and permissions
About this article
Cite this article
Scott, R., Marsh, R. & Hays, G.C. A little movement orientated to the geomagnetic field makes a big difference in strong flows. Mar Biol 159, 481–488 (2012). https://doi.org/10.1007/s00227-011-1825-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00227-011-1825-1