
Abstract
We compared the results from fixed acoustic transmitters and transmitters implanted in lingcod Ophiodon elongatus provided by two fine-scale passive acoustic monitoring systems: the older Vemco© Radio Acoustic Positioning (VRAP) system and the newer VR2W Positioning System (VPS) with either three or four receivers. The four-receiver VPS method calculated five times more positions of lingcod than VRAP and more than twice as many as the three-receiver VPS. Calculated positions of fixed transmitters were less precise with VRAP than either VPS approach. Measurements of home range for lingcod were similar between the four-receiver VPS and VRAP, which were both greater than the three-receiver VPS. Comparisons varied when lingcod were in/near complex habitats. As new technology develops, it is important to understand how new methods compare to previous methods. This may be important when describing patterns of movement or habitat use in the context of changes in habitat or management efforts.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The use of acoustic telemetry technology has become an increasingly common approach to answering questions about animals’ use of space, movement patterns, and natural history. In the marine environment, acoustic tracking has been used extensively to estimate home range size, movement behavior, and activity patterns of many reef-associated fishes, often in reference to the design of marine reserves (Zamora and Moreno-Amich 2002; Lowe et al. 2003; Parsons et al. 2003; Topping et al. 2005, 2006; Jadot et al. 2006; Jorgensen et al. 2006; Kerwath et al. 2007; Mitamura et al. 2009; Tolimieri et al. 2009; March et al. 2010).
For marine fish, acoustic transmitters are either implanted into the peritoneal cavity of the fish (e.g., Andrews et al. 2009) or attached externally (e.g., Cartamil and Lowe 2004). The transmitters or “tags” emit a series of “pings” that are decoded by acoustic receivers and provide the researcher with a unique ID code corresponding to a specific tagged individual. There are, in general, three methods used to monitor individuals tagged with acoustic transmitters, and each method provides distinct types and scales of information about the movement patterns of tagged individuals. First, passive acoustic receivers “listen” for and record the presence of tagged individuals within the vicinity of the receiver, providing 24h a day presence/absence data within the listening range of the receiver (dependent on power of transmitter and acoustic environment) over long temporal periods (months to years). Second, active tracking methods involve following tagged individuals from a boat giving an individual’s actual path through its environment across large spatial scales (tens of kilometers) for limited periods (tens of hours). Third, fixed location, high-resolution passive acoustic monitoring systems can calculate the x–y position of tagged individuals and provide fine-scale resolution of movement patterns over long temporal scales (weeks to months), typically at small spatial scales (<1 km2).
One of the more commonly used high-resolution passive monitoring systems has been Vemco©’s Radio Acoustic Positioning system (VRAP). Recently, however, Vemco© has introduced the VR2W Positioning System (VPS) as a lower-cost option to the VRAP. Both of these systems estimate fine-scale movement data at the resolution of a few meters. Positions of tagged individuals are calculated by measuring the difference in arrival times of pings among a minimum of three receivers. VRAP allows the user to see movement of organisms in real time, while VPS does not (see Table 1 for comparisons of the two systems). The hydrophones used in VRAP are fixed to a buoy and are typically submerged just under the surface of the water, while the hydrophones in VPS are typically moored near the bottom of the seafloor. The ability to detect tags varies with the acoustic environment that includes ambient noise (e.g., from a reef), variation in surface conditions caused by weather patterns, or physical disturbances in the water related to boat traffic or underwater substrates (reviewed by Simpfendorfer et al. 2008). Thus, differences in location of acoustic hydrophones (either near the surface or near the bottom) may alter the accuracy of calculated positions or alter the number of detections collected by each system. There are also logistical and budgetary constraints associated with each system that may make one more accurate or more cost-effective, respectively, than the other depending on the researcher’s system, skill set, and budget. However, the accuracy and precision of the two systems have not been compared to determine whether one system significantly outperforms the other. Without this information, it is difficult to make logistical and budgetary decisions about which system to employ.
In this study, we compared the performance of the VRAP and VPS simultaneously on a temperate reef in Puget Sound, WA, USA, using movement data for lingcod Ophiodon elongatus. Specifically, we asked whether the number of calculated positions, the precision of the calculated positions, and the estimated home range of each fish differ between the two fine-scale monitoring systems. These comparisons are not exhaustive, but provide insight into collecting data in a high-current environment with complex substratum and should be interpreted as such. We used products from Vemco© for this comparison because we are most familiar with this vendor’s equipment and the data collected with these products. The intention of this paper is not to endorse any vendor’s product, but simply to compare commonly used methodologies.
Materials and methods
Study site
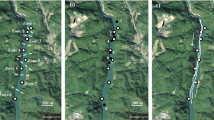
The study site was located at the southern end of Whidbey Island in Puget Sound, WA, USA (47° 54.308′N, −122° 26.072′W) (Fig. 1). The study area ranged in depth from approximately 8–19 m chart datum with 3 m tides. This site is primarily low-relief sandstone composite with strong east–west tidal flow of at least 1.4 m s−1 (2.7 knots, measured with Acoustic Doppler Current Profiler; N. Tolimieri, unpublished data). In the approximate center of the study area and running from the southwest to the northeast, there is an uplifted ridge that ranges in height from ca. 10 cm to as much as 8 m (Fig. 1). This ridge is the primary physical structure in the study area. Although not visible on the multibeam map in Fig. 1, a cave-like area several meters deep extends horizontally under the eastern, uplifted side of the ridge. The higher, eastern fringe of the uplifted area generally supports brown macroalgae Pterygophora californica and Agarum fimbriatum from the ridge margin to ca. 10 m to the east in the shallower areas. Small rocks (up to ~0.3 m diameter) and several large boulders (~2.0 m diameter) are scattered throughout the area, especially to the east. To the northwest and just out of the VRAP buoy triangle, but within the triangles created by VPS receiver 4, is a depression approximately 2–3 m deeper than the surrounding area.

Topography of the study site, location of the VRAP and VPS receivers, and calculated positions for three tagged lingcod under the three methods. Soundings in meters are given on the top pane. Lingcod 2 = red circles, lingcod 8 = light blue circles, lingcod 14 = black circles. Yellow flag symbols indicate the location of VRAP buoys and VPS receivers. Positions for buoys 1–3 (indicated by numbers in callouts) were in the same position for VRAP and both VPS methods. Receiver four was unique to the VPS.1 method
The tidal regime and uplifted ridge are the two features of the site that are most important to the present analyses. The tidal currents affect the position of surface deployed VRAP receivers and the apparent position of tags (see below). The uplifted ridge and cave-like areas are important because they may interfere with the transmitter signals, causing loss of data. In addition, the propagation of transmitter signals may be inhibited by the growth of macroalgae in the shallow areas on top of the ridge.
Fish tagging
Capture and tagging procedures are described in detail by Tolimieri et al. (2009). In brief, SCUBA divers used large hand nets to catch lingcod at approximately 10–20 m depth on both sides of the ridge during slack tides in September and October 2008. Fish were placed in wire mesh enclosures (crab pots, 1–3 fish per) underwater and transferred to the surface for surgery. At the surface, a V13 acoustic transmitter (13 mm diameter; 36 mm length; weight: 11 g in air, 6 g in water; 30–90 s random delay interval; power output: 147 dB) was inserted into the peritoneal cavity. After a 5-min recovery period, fish were returned to the water in the general vicinity of their capture.
VRAP system setup and data processing
In nearly all publications, the VRAP system consists of three buoys, a radio base station, and a computer (described in detail by Klimley et al. 2001). There are a few examples of four-buoy VRAP configurations (e.g., Sauer et al. 1997; O’Dor et al. 2001), but these were generally performed during the initial development of the technology and the software necessary to run a four-buoy configuration is not generally provided with the VRAP system. Each buoy consists of a hard-wired acoustic hydrophone submerged underwater (either fixed to the buoy just under the surface of the water or extended to the bottom of the seafloor), ultrasonic receiver, a two-way radio link, a microprocessor controller, and a rechargeable battery. The two-way radio allows the buoys to send detection data to the base station and receive communications from the base station for calibrating and calculating the location and distance between each buoy. This two-way communication also allows for “real-time” detection data to be displayed on a connecting computer. Using VRAP 5.1.1 software, the VRAP system calculates the position of the fish by measuring the difference between arrival times of the pings to each of the three buoys (Klimley et al. 2001). The precision of this system is often stated to be accurate to 1–2 m (O’Dor et al. 1998; Klimley et al. 2001), but the ability of any acoustic receiver to detect transmissions varies with the acoustical environment and the behavior of tagged individuals (e.g., Simpfendorfer et al. 2008). VRAP also requires a platform, typically land-based, within line-of-sight of the three buoys for the entire study period to house the base station and computer. Each buoy is powered by a rechargeable battery that lasts for approximately 7–10 days depending on the number of detections made and the number of calibrations of buoy position made during the deployment.
Tidal currents at the Whidbey site are strong, which caused the VRAP buoys to shift position substantially (~40 m), primarily east to west, and rapidly between the flood and ebb tides (Tolimieri et al. 2009). Because we deployed the hydrophones in the standard position affixed to the underside of the buoys (not extended via cables to the bottom), the repositioning of the buoys caused by the tides made it appear as if the fish moved with the tide, when in fact, they did not. To correct for the tidally induced buoy movement, we referenced a fish’s location to four acoustic tags deployed at fixed positions within the buoy array (referred to hereafter as “fixed tags”). A fifth fixed tag was deployed to mark a specific habitat feature within the study area. This fifth tag was not used in data correction, but is included in some of the analyses of system performance described below. Fixed tags had a random delay interval of 60–183 s.
Data processing followed Tolimieri et al. (2009). In brief, when the VRAP buoys were deployed, we entered the known latitude and longitude (based on Garmin GPSMap192C) of each buoy into the VRAP software program. We resolved the correct position of the fixed tags based on their mean position during the first several hours of a previous deployment of the VRAP (October 21, 2008) when current direction, and therefore, buoy positions were stable. We then corrected fish positions by subtracting the apparent displacement of fixed tags from their actual position using the most recent fixed tag position for each fish position. Fish data that did not have a fixed tag reference within the previous 10 min were considered bad data and removed from the data set. Additionally, to remove bad fixed tag positions from the analysis, we used three of the fixed tags to correct the position of the fourth tag. Prior to correcting the fish data, we removed any fixed tag observations that were more than one standard deviation (on either the x- or y-axis) from the corrected mean position for each tag.
For this study, we used data collected April 20–May 17, 2009 when both VRAP and VPS were deployed simultaneously. VRAP buoys were moored approximately 300 m apart on each side of the triangle (total area within the triangle: 0.04 km2), which placed the majority of the reef system inside the boundaries of the triangle (Fig. 1). The base station, radio antenna, and computer were housed in a private residence 3 km away. Due to strong currents, we deployed the hydrophones in the standard position just under the surface of the water instead of extending the hydrophones to the bottom. We were primarily concerned about the wear and potential breakage of cables due to the strength and action of the currents in the area as well as the potential for fishermen to snag excess cabling with fishing equipment and anchors. We replaced batteries in the three buoys every 7–10 days.
VPS setup and data processing
VPS uses an array of passive monitoring receivers (Vemco©’s VR2W) to calculate the x–y positions of acoustic transmitters. The receivers are deployed, retrieved, and downloaded by the researcher, and the data files are sent to the vendor/manufacturer for processing. Similar to the VRAP, at least three receivers must detect the same series of pings for a position to be calculated. Unlike the VRAP system, the VPS can be deployed with more than three receivers, creating multiple triangles and increasing the spatial coverage of the study site. Depending on the number of detections, the VPS array can be deployed for several weeks or several months at a time without any maintenance or retrievals. With sufficiently long transmitter delay times, deployments up to a year have been successful (C. Rosten, Norwegian Institute for Water Research, unpublished data, 361 days in a lake in Norway).
The precision of the VPS is dependent in part on three factors: (1) precisely measuring the location (i.e., latitude/longitude) of all receivers, (2) knowing the speed of sound in the research area, and (3) synchronizing the clocks of all receivers. Each VR2W operates independently, whereas all three VRAP buoys operate as one under the control of a central computer that uses the buoys to “ping” each other to calculate the speed of sound and the distance between each other. For VPS, it is crucial to make accurate measurements of the location of each receiver because all the calculated positions are based on the timing of arrival of pings traveling at known speeds among different receivers that are known distances apart. The speed of sound can be calculated by collecting temperature and salinity data during the deployment (Klimley et al. 2001). Similarly, the internal clocks of all receivers in the array must be synchronized in order to calculate accurate differences in the timing of arrival of pings. Time drift occurs in the VR2W’s internal clock during deployment; thus, it is necessary to synchronize the clocks during deployment. This is performed best by colocating a sync transmitter with each VR2W, so the timing of arrival of pings from known distances away traveling at known speeds can synchronize the clocks of receivers detecting the same pings. We colocated standard sync transmitters (model: V16, random delay interval: 540–660 s) on the mooring line, 1 m above each of the VR2Ws.
For this study, we used data collected April 20–May 17, 2009 from an array of four VR2W receivers deployed in a trapezoidal pattern such that the majority of the reef system was within the trapezoid (Fig. 1). Three of the four receivers were moored in the same location as the anchors for the VRAP buoys, and all four were suspended 2 m off the bottom. The distance between each receiver ranged between 176 and 377 m (total area of trapezoid: 0.06 km2).
VPS data were processed by Vemco© using two different approaches. The first approach (VPS.1) calculated the position of each transmitter using the detections from all four receivers. For example, if a lingcod was detected at ~10:02 AM on May 4, 2009 at all four receivers, the position of the lingcod was calculated using all four times of arrival. Alternatively, if a lingcod was detected at only three of the four receivers, then the position of the lingcod was calculated using only three times of arrival. If detections occurred on only one or two of the receivers, no position was calculated.
The second approach (VPS.2) calculated the positions of each transmitter using only three of the four receivers. Thus, if a lingcod was detected at the same time at all four receivers, four positions were calculated—one for each of the four combinations of three receivers. For the VPS.2 method, we reference the receivers that made up that triangle. For example, VPS.2_123 refers to the VPS method two triangle that was calculated from receivers one, two, and three. In our analyses, we focus on only those positions calculated from the three VPS receivers on the VRAP mooring lines (Fig. 1, hereafter, VPS.2_123) to allow direct comparison with the VRAP system based on the positioning of those receivers. Using both approaches allows us to make two separate comparisons: (1) differences between VRAP and VPS using VRAP and VPS.2_123 data and (2) differences between a three-receiver and a four-receiver VPS setup using VPS.1 and VPS.2_123 data.
Home range/utilization distribution
The utilization distribution (UD) provides a probabilistic description of the space use of an animal. The 95% UD is typically called the home range. We calculated the 95% UDs of each lingcod using a spatio-temporal kernel method (STK; Katajisto and Moilanen 2006; Tolimieri et al. 2009). This approach accounts for spatial and temporal autocorrelation within the data. The STK method requires choosing two smoothing parameters—spatial (hs) and temporal (ht). We used a simple estimate of the optimum hs value, hopt (Worton 1989), and set hs = 4.0 m. This value is slightly larger than the median hopt for lingcod for the most accurate system (VPS.1, see “Results”). It is also slightly larger than the precision of the VRAP system, quantified as the standard deviation in the position of the fixed tags. For ht, we used ht(Nmin). Because data are weighted, the effective sample size (Neff) is lower than the full sample size N. Nmin is the point at which all samples can be considered independent. While ht(Nmin) is probably an overestimate of optimal ht, it is a maximum estimate and convenient for our purposes. UDs were calculated using the program B-Range (Katajisto and Moilanen 2006).
Comparisons and data analysis
We compared several parameters of system performance among the VRAP, VPS.1, and VPS.2_123 methods: (1) number of calculated positions for lingcod and fixed tags, (2) standard deviation in calculated position of fixed tags, and (3) estimated home range size for lingcod. The number of calculated positions is important because more data should give a better understanding of the behavior, activity, and space use of individuals. Since the fixed tags do not move, the standard deviation of the fixed tags gives an estimate of the precision of the system (measurement error). Finally, since the goal of much acoustic tracking work is to estimate home range size, it is important to determine whether differences in system performance produce meaningful differences in home range estimates.
For the comparison of the number of calculated positions (count data), we used a generalized linear mixed model (GLMM) with log link and negative binomial distribution (data were over dispersed). Method (VRAP, VPS.1, VPS.2_123) and “species” (lingcod or fixed tag) were the main effects with fish/fixed tag ID included as a random blocking factor. Use of a log link makes the parameter effects multiplicative on the original data scale (McCullagh and Nelder 1989). Since deployment times will differ among studies, the additive difference (e.g., 450 more) in the number of calculated positions is not meaningful, but the multiplicative difference is (e.g., twice as many).
We tested for differences in mean standard deviation of the fixed tags with a linear mixed model (LMM) with method as the main effect. Fixed tag ID was included in initial models as a random blocking factor, but was removed from the final model as comparison of AIC values showed that it did not enhance model fit. In this analysis, the data are the standard deviation of each of the five fixed tags.
We compared home range estimates for lingcod among tracking methods using a GLMM with log link and gamma distribution. Method was the main effect with fish ID as a random blocking term. Only lingcod UDs were compared. We chose a log link with gamma error structure to generate effect size estimates on a multiplicative scale (e.g., 1.4 times larger vs. 400 m2 larger) because home ranges differed in scale, which would affect additive estimates of home range size.
Results
Over the 27-day deployment period, the VRAP system calculated a total of 4,701 positions for 12 of 16 tagged lingcod and 10,891 positions for the five fixed tags (Table 2). Four lingcod were either never detected during this time period or only detected on 1 day; thus, we have excluded them from all analyses. There were more calculated positions of fixed tags assumedly because these tags were placed in exposed areas, while lingcod frequently rest near/under rocks and other areas that will obscure the tag signal. Correction for VRAP buoy movement due to shifting tides and the elimination of calculated positions without a good fixed tag reference (hereafter, periods when VRAP considered “non-functioning”) resulted in data loss of 13.8% for lingcod and 7.2% for the fixed tags. The number of calculated positions for each individual fish varied substantially (Table 3) probably due to the fishes’ behavior and location within the buoy array.
Over the same period, the VPS.1 calculated 19,263 positions of lingcod and 17,092 positions for the fixed tags prior to eliminating data from periods when the VRAP was not functioning and data loss from the processing of lingcod data (Table 2). Including only data from periods when the VRAP was functioning resulted in a loss of 6.0% of the lingcod data and 5.9% of the calculated positions for fixed tags (“Corrected” data in Table 2). Because the number and duration of any non-recording period for the VRAP system will vary among studies, in all following analyses and comparisons, we include only data from deployments when both the VRAP and the VPS systems were functioning (“Corrected” data from in Table 2).
When examined at the level of individual tags, the number of calculated positions varied among methods and “species” (Fig. 2, GLMM, log link, negative binomial error, method * species interaction, F2,29 = 10.55, p < 0.001). The VPS.1 calculated more positions of fixed tags than did the three-receiver VPS.2_123 (Tukey–Kramer test, p < 0.05). The VPS.1 calculated 2.1 (95% CI: 1.36–3.26) times as many positions per fixed tag as did the VPS.2_123. The number of calculated positions of fixed tags did not differ significantly between VPS.1 and VRAP methods (Tukey–Kramer test, p = 0.35), nor between the VRAP and VPS.2_123 (Tukey–Kramer test, p = 0.77). For lingcod, however, VPS.1 calculated 5.02 (95% CI: 3.78–6.68) times more positions per individual than the VRAP and 2.69 (95% CI: 2.00–3.61) times more than the VPS.2_123 (Tukey–Kramer test, p < 0.001). The VPS.2_123 calculated 1.86 (95% CI: 1.39–2.51) times as many positions as did the VRAP (Tukey–Kramer test, p = 0.003).

Mean number of calculated positions for lingcod and fixed tags for the three methods. Error bars indicate ±1 SE
An examination of the spatial distribution of calculated positions for several fishes shows how the performance of the three methods was affected by topography and the location of a fish’s home range (Fig. 1; Table 3). For comparison, Table 3 includes data from all four VPS.2 triangles. Although data for the triangles other than VPS.2_123 are presented in Table 3, they were not analyzed statistically elsewhere. Both the VRAP and the VPS.2_123 had difficulty in detecting tags on the top of the ridge in the northeast corner of the triangle (Fig. 1). In this location, lingcod #8 was detected only 9 times with the VRAP and not at all with the VPS.2_123 (blue circles in Fig. 1). The VPS.2_124 triangle of receivers was much better at detecting tags in this area, with over 2,300 calculated positions of lingcod #8 (Table 3). This suggests that receivers on buoy number three were too far away to detect pings from this area or was impeded (e.g., by kelp or substrate interference) from making detections of transmitters in this location. The VPS.1 calculated over 2,300 positions of lingcod #8 at that location—all from the 124 triangle. Similarly, the VPS.2_123 triangle was poor at detecting lingcod #2 (Fig. 1), which resided in the center of the triangle but was potentially blocked from some receivers by the ridge. The VRAP detected this fish only 127 times and the VPS.2_123 triangle only 93. The VPS.2_124 triangle received 311 detections at this location, suggesting that receivers on buoy number three were again partially blocked from “hearing” fish in this area. The full VPS.1 setup recorded 493 hits and provided a more complete representation of its space use. Additionally, only the VPS.1 was able to provide data, which showed lingcod #14 moving from the deeper basin area, over the ridge, and into the uplifted terrace area (Fig. 1).
Based on a comparison of standard deviations in the calculated position of the fixed tags, the VRAP was the least precise of the methods (Fig. 3, LMM, F2,12 = 8.44, p = 0.005). Data from the VRAP had higher standard deviations (lower precision) than did the VPS.2_123 data (Tukey–Kramer test, p = 0.005) or the VPS.1 data (Tukey–Kramer test, p = 0.04), but the two VPS methods did not differ (Tukey–Kramer test, p = 0.45).

Mean standard deviation (m) on the x- and y-axes in the calculated position of five fixed tags for the three methods. Error bars indicate ±1 SE. HPEm is the mean calculated horizontal position error for fixed tags provided by Vemco during data processing
Vemco also provided estimates of the precision for the VPS (HPEm: measured horizontal position error) based on the fixed tags. We provided GPS locations of these fixed tags to Vemco. Thus, HPEm represents the error in the calculated position from the given GPS coordinates. The mean estimates of HPEm for the four fixed pingers ranged from ±1.3 to 1.8 m for VPS.1 and from ±1.0 to 1.5 for VPS.2.123, which were nearly identical as the estimates we produced from the LMM (Fig. 3).
Estimates of lingcod home ranges (95% utilization distributions) varied between 864–4,144 m2 for the VRAP, 752–6,128 m2 for the VPS.1 and 976–3,600 m2 for the VPS.2_123. Mean home range estimates differed among systems (Fig. 4, GLMM, log link, gamma distribution, F2,21 = 9.68, p = 0.001). VPS.1 home ranges were 1.58 (95% CI: 1.28–1.95) times larger than VPS.2_123 home ranges (Tukey–Kramer test, p < 0.001). VRAP home range estimates were 1.39 (95% CI: 1.12–1.71) times larger than VPS.2_123 estimates (Tukey–Kramer test, p = 0.016). VPS.1 and VRAP home ranges did not differ in size (Tukey–Kramer test, p = 0.42).

Mean home range (95% utilization distribution) for lingcod as estimated by the three methods. Error bars indicate ±1 SE
Discussion
Improvements in acoustic telemetry technology have allowed researchers to monitor the movement patterns of marine species at multiple spatial and temporal scales. However, improvements in technology or substitution of lower-cost options need to be tested and compared to historical methods for at least two reasons. First, it is important to understand how results from new technologies will compare with results from historical methods. Estimates of home ranges are commonly used to understand space and habitat use of fishes and temporal variation in these estimates may be used to infer changes in habitat or behavior related to changes in habitat or management efforts. Secondly, it is necessary to determine that the quality and benefits of new technologies exceed the costs of switching between technologies. Some technologies or options may be more practical in particular situations such as those examined here (i.e., high current, high topography areas). In this paper, we compared the results provided by two fine-scale passive acoustic monitoring systems, the older VRAP system, and the newer VPS.
Our experimental design represented two extremes of deployment that which is most convenient for the VRAP system and that which is most effective for the VPS. A more complete comparison of the two systems would have included a treatment in which the VRAP hydrophones were deployed near the bottom (and vice versa for the VPS) to eliminate the need for correcting the data for movement of the VRAP buoys/hydrophones. While it is possible to position the VRAP hydrophones at depth via an extension, we were concerned that the extra cabling required may wear or break due to the high currents in the area and because of the potential for fishermen to snag the extra cabling with fishing equipment or anchors. Any problems with the cabling would have required SCUBA diving, which would have limited our flexibility in routine maintenance of the buoys due to strong currents and necessary personnel to perform diving operations. The deployment with hydrophones fixed to the buoys just below the surface allowed any two researchers in a small boat to easily maintain the VRAP system every 7–10 days.
Having more receivers (four vs. three) clearly resulted in more data for lingcod movement, probably due to two factors. First, four receivers resulted in coverage of a larger area, allowing the VPS.1 system to detect fish that were out of range of one of the three locations common to all three setups. Second, the additional receiver allowed the system to avoid lost transmissions due to interference from complex habitat since only three of the four receivers need to be in a position to receive the transmission. Lacking a fourth receiver, deploying the receivers near the bottom (VPS.2_123) was better than deploying them at the surface (VRAP) in terms of the total number of calculated positions for lingcod (Table 2); although this could vary with the location of tagged individuals if a receiver is placed in a position that is obstructed by complex substrates. Thus, thoughtful consideration of habitat features in the study area is important to the successful positioning of receivers near the bottom. It is likely that in less complex habitats and more benign oceanographic conditions, the number of calculated positions in a three- versus four-receiver system (either near the bottom or at the surface) would only differ because of differences in spatial coverage, not because of lost transmissions.
Both VPS setups provided more precise data than did the VRAP, as indicated by the standard deviation in the position of fixed tags. The lower precision of the VRAP system was probably due in large part to measurement error from two sources: the tag of interest and the fixed tag used to correct the data for buoy movement. It is not likely that this result was caused by technical differences in the VRAP and VPS hardware or software, but more likely relates most directly to the positioning of the receivers in the water column: an issue common to both VRAP and VPS systems. In our setup, the VRAP hydrophones were deployed near the surface. During times of choppy weather or tidal changes, data may be lost or altered due to the movement of the buoys. Because positions are calculated by differences in the timing of arrival at the scale of milliseconds, it is likely that buoys “bouncing” in choppy weather or moving with changes in current speed could alter the timing of arrival; thus, increasing the error in the calculated position during these events. Another factor to anticipate when deploying hydrophones at the surface is whether a halocline exists in the study area. In an area with a top layer of freshwater, acoustic transmissions from the bottom may be reflected or deflected causing loss of data or inaccurate timing of detections (Jackson et al. 2005).
While the VRAP was less precise and had fewer calculated positions of lingcod than either of the VPS approaches, the area covered by each system seemed most important in influencing estimates of home range size. We found no difference between VPS.1 and VRAP in terms of mean home range, even though VPS used four receivers while VRAP used only three. However, the home range estimates of VPS.2_123 were significantly smaller than either the VPS.1 or VRAP, even though VPS.2_123 had more calculated positions than VRAP. This suggests that the spatial coverage of VRAP was greater than the spatial coverage of VPS.2_123 assumedly because one or more VPS.2_123 receivers were unable to detect lingcod in certain areas of the study site due to complex habitat features or because they were too far away. Transmissions by lingcod tags could propagate vertically to the VRAP hydrophones at the surface more easily than they could propagate horizontally to the VPS receivers at the bottom. Thus, the accuracy of home range estimates using any of these systems will likely vary with specifics of each project, including the location of receivers with respect to the complexity of the habitat and the behavior of tagged individuals.
The general agreement between VRAP and the four-receiver VPS.1 approach for home ranges is encouraging for at least two reasons. First, many researchers have used VRAP to quantify home ranges of marine fishes; thus, estimates of home range from VPS will be comparable to previous estimates. This may be important when looking at temporal shifts in behavior or habitat use of fishes in the future. We also suspect that three-receiver VPS would be comparable to VRAP in less complex habitats because there would be less loss of data due to interference of ridges, boulders, or stands of macroalgae. However, our results suggest it is prudent to deploy as many receivers as logistically and financially feasible in order to account for potential loss of data. Secondly, most of the species examined with VRAP to date have been relatively site-attached species (e.g., Tolimieri et al. 2009). Switching to VPS would allow researchers to measure fine-scale movements and monitor habitat use of more mobile species because the spatial coverage of the VPS can be increased by simply deploying more VR2Ws. The VRAP system is generally constrained to operating with three buoys at a time and to the detection radius of a transmitter, which varies with its power output. In our experience, the maximum length of sides of the triangle is ~300 m when using either V9 (power output: 142 dB) or V13 (power output: 147 dB) transmitters in complex habitats in Puget Sound waters. Larger triangles cause intermittent communication among the buoys, such that the buoys cannot calibrate the distances between each other. These communication problems are likely caused by choppy waters at the surface interfering with the hydrophones ability to transmit and receive “pings” from the other buoys. A few researchers have deployed VRAP buoys in larger triangles using more powerful transmitters (e.g., up to 530 m; V22; power output: 153 dB; Klimley et al. 2001), but the majority of studies published in the literature have used a triangle with sides ≤300 m in length (e.g., Parsons et al. 2003; Tolimieri et al. 2009; Jadot et al. 2006; Jorgensen et al. 2006).
Personnel costs associated with each study will vary but, equipment costs should be similar among studies (see Table 1 for comparisons). In general, the VRAP system requires a large, up-front investment for the buoys and base station. In 2010, a three-buoy VRAP system costs ~$50,000 + ~$1,000 for hardware and mooring equipment necessary for high-current habitats for a total of ~$51,000 CDN. A deployment of the VRAP for 1 month typically requires 9–11 personnel days to deploy and maintain the buoys every 7–10 days. On the other hand, a minimalistic VPS array of four receivers with four sync transmitters costs ~$7,800 + a $5,000 data processing fee + small anchors for deployment for a total of ~$13,000 CDN. A deployment of 1 month would require either 4 or up to 10 personnel days depending on whether VR2Ws are deployed from the surface (2 personnel days for deployment + 2 personnel days for recovery) or deployed using SCUBA divers (5 personnel days for deployment + 5 personnel days for recovery under OSHA diving regulations). Vemco© will process VPS data up to four times on a single array setup in the same location before additional fees would ensue. The only reoccurring cost for the VRAP system is personnel costs associated with maintaining buoys and processing data. Although it is noteworthy that VRAP buoys on the surface are more susceptible to loss than submerged receivers due to mooring line fatigue, boat strikes, or other potential vandalism. Overall, the VRAP system may be more cost-effective in the long run if a research group plans multiple studies in several different habitats spanning several years. The VPS may be more cost-effective and suited toward specific, narrowly focused research objectives that occur at the same study site.
Ultimately, the decision of which system is best should be decided by the research questions of interest. If the questions concern what an individual does on an average day within a constrained spatial region, then both systems can provide detailed information on movement. However, if you are more interested in what an individual does for the entire day, not constrained by space, then the real-time data provided by the VRAP system would allow researchers to know when an individual is leaving the area and allow for subsequent tracking in a boat using active acoustic telemetry. The ability to monitor forays outside of the continuous monitoring region may be important for determining the home ranges of some individuals.
The comparison we have made is similar to a comparison made between the passive monitoring VPS and actively tracking fish through the VPS array (Espinoza et al. 2011). This comparison showed similar consistency in measuring the overall movements of fish between two systems that vary dramatically in personnel costs. These comparisons provide researchers with the necessary information to make technological choices depending on what system they work in (habitat types and oceanographic processes) and what skill sets their personnel possess (i.e., SCUBA divers or not). Given the VPS provides similar measurements of home range as the VRAP, provides more accurate positions of fixed tags than the VRAP, and may be more cost-effective, particularly in funding requests, it seems that the new methodology will improve the ability of marine scientists to monitor the movement of marine organisms, particularly when trying to resolve differences in habitat-specific behaviors. However, the number of receivers used, the placement of receivers within complex habitats, and the behavior of tagged individuals will ultimately determine the quantity and quality of data collected by these fine-scale acoustic monitoring systems.
References
Andrews KS, Williams GD, Farrer D, Tolimieri N, Harvey CJ, Bargmann G, Levin PS (2009) Diel activity patterns of sixgill sharks, Hexanchus griseus: the ups and downs of an apex predator. Anim Behav 78:525–536
Cartamil DP, Lowe CG (2004) Diel movement patterns of ocean sunfish Mola mola off southern California. Mar Ecol Prog Ser 266:245–253
Espinoza M, Farrugia TJ, Webber DM, Smith F, Lowe CG (2011) Testing a new acoustic telemetry technique to quantify long-term, fine-scale movements of aquatic animals. Fish Res 108(2–3):364–371. doi:10.1016/j.fishres.2011.01.011
Jackson GD, O’Dor RK, Andrade Y (2005) First tests of hybrid acoustic/archival tags on squid and cuttlefish. Mar Freshwater Res 56(4):425–430. doi:10.1071/mf04248
Jadot C, Donnay A, Colas ML, Cornet Y, Bégout Anras ML (2006) Activity patterns, home-range size, and habitat utilization of Sarpa salpa (Teleostei: sparidae) in Mediterranean waters. Ices J Mar Sci 63:128–139
Jorgensen SJ, Kaplan DM, Klimley AP, Morgan SG, O’Farrell MR, Botsford LW (2006) Limited movement in blue rockfish Sebastes mystinus: internal structure of home range. Mar Ecol Prog Ser 327:157–170
Katajisto J, Moilanen A (2006) Kernel-based home range method for data with irregular sampling intervals. Ecol Modell 194:405–413
Kerwath SE, Gotz A, Attwood CG, Sauer WHH, Wilke CG (2007) Area utilisation and activity patterns of roman Chrysoblephus laticeps (Sparidae) in a small marine protected area. Afr J Mar Sci 29(2):259–270. doi:10.2989/ajms.2007.29.2.10.193
Klimley A, Le Boeuf B, Cantara K, Richert J, Davis S, Van Sommeran S (2001) Radio acoustic positioning as a tool for studying site-specific behavior of the white shark and other large marine species. Mar Biol 138(2):429–446
Lowe CG, Topping DT, Cartamil DP, Papastamatiou YP (2003) Movement patterns, home range, and habitat utilization of adult kelp bass Paralabrax clathratus in a temperate no-take marine reserve. Mar Ecol Prog Ser 256:205–216
March D, Plamer M, Alos J, Grau A, Cardona F (2010) Short-term residence, home range size and diel patterns of the painted comber Serranus scriba in a temperate marine researve. Mar Ecol Prog Ser 400:195–206
McCullagh P, Nelder JA (1989) Generalized linear models, 2nd edn. Chapman and Hall, New York
Mitamura H, Uchida K, Miyamoto Y, Arai N, Kakihara T, Yokota T, Okuyama J, Kawabata Y, Yasuda T (2009) Preliminary study on homing, site fidelity, and diel movement of black rockfish Sebastes inermis measured by acoustic telemetry. Fish Sci 75(5):1133–1140. doi:10.1007/s12562-009-0142-9
O’Dor R, Andrade Y, Webber D, Sauer W, Roberts M, Smale M, Voegeli F (1998) Applications and performance of Radio-Acoustic Positioning and Telemetry (RAPT) systems. Hydrobiologia 371–372:1–8. doi:10.1023/a:1017006701496
O’Dor RK, Aitken JP, Babcock RC, Bolden SK, Seino S, Zeller DC, Jackson GD (2001) Using radio-acoustic positioning and telemetry (RAPT) to define and assess marine protected areas (MPAs). In: Sibert JR, Nielsen JL (eds) Electronic tagging and tracking in marine fisheries. Kluwer Academic Publishers, Netherlands, pp 147–166
Parsons DM, Babcock RC, Hankin RKS, Willis TJ, Aitken JP, O’Dor RK, Jackson GD (2003) Snapper Pagrus auratus (Sparidae) home range dynamics: acoustic tagging studies in a marine reserve. Mar Ecol Prog Ser 262:253–265
Sauer WHH, Roberts MJ, Lipinski MR, Smale MJ, Hanlon RT, Webber DM, O’Dor RK (1997) Choreography of the squid’s “nuptial dance”. Biol Bull 192(2):203
Simpfendorfer CA, Heupel MR, Collins AB (2008) Variation in the performance of acoustic receivers and its implication for positioning algorithms in a riverine setting. Can J Fish Aquat Sci 65(3):482–492
Tolimieri N, Andrews KS, Williams GD, Katz SL, Levin PS (2009) Home range size and patterns of space use by lingcod, copper rockfish and quillback rockfish in relation to diel and tidal cycles. Mar Ecol Prog Ser 380:229–243. doi:10.3354/Meps0793
Topping DT, Lowe CG, Caselle JE (2005) Home range and habitat utilization of adult California sheephead, Semicossyphus pulcher (Labridae), in a temperate no-take marine reserve. Mar Biol 147:301–311
Topping DT, Lowe CG, Caselle JE (2006) Site fidelity and seasonal movement patterns of adult California sheephead Semicossyphus pulcher (Labridae): an acoustic monitoring study. Mar Ecol Prog Ser 326:257–267
Worton BJ (1989) Kernel methods for estimating the utilization distribution in home-range studies. Ecology 70(1):164–168
Zamora L, Moreno-Amich R (2002) Quantifying the activity and movement of perch in a temperate lake by integrating acoustic telemetry and a geographic information system. Hydrobiologia 483(1):209–218
Acknowledgments
We thank G. & S. Parmelee of the Culthius Bay Community Association for providing a platform (their garage) for the VRAP base station, computer, and radio antenna; F. Smith from Vemco© for processing the VPS data and A. Dufault for help maintaining VRAP buoys during the study. The use of trademark system names does not constitute the endorsement of any particular commercial product; we only use commercial names to ease discussion of the different methods. We also thank F. Smith, D. Allan, and two anonymous reviewers for useful comments on this manuscript. Special thanks to Rodrigo and Gabriela for inspiration during the writing process.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by D. Righton.
Rights and permissions
About this article
Cite this article
Andrews, K.S., Tolimieri, N., Williams, G.D. et al. Comparison of fine-scale acoustic monitoring systems using home range size of a demersal fish. Mar Biol 158, 2377–2387 (2011). https://doi.org/10.1007/s00227-011-1724-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00227-011-1724-5