
Abstract
Information about foraging speeds is particularly valuable when the impact of a predator species upon a community of prey has to be defined, as in the case of great cormorants. We measured the swim speed of 12 (six males and six females) free-ranging great cormorants Phalacrocorax carbo, foraging off the Greenland coast during the summer of 2003, using miniaturized data-loggers. Although mean body mass of males was 27% greater than that of females, and mean swim speed of males were 29–57% higher than that of females during foraging phases (but not descent phases) of dives, these differences in speeds were not significant due to high variances. Birds descended to the mean maximum depth of 4.7 m at an average speed of 1.6±0.5 m s−1, a speed similar to that measured in captive cormorants in previous studies. Although bursts of up to 4 m s−1 were recorded, speed usually decreased during the deepest (foraging) phase of dives, being on average 0.8±0.6 m s−1. Speeds measured here should be taken with caution, because the large propeller loggers used to measure speed directly decreased descent speeds by up to 0.5 m s−1 when compared to smaller depth-only loggers. Cormorants in Greenland seem to combine two searching strategies, one requiring low speed to scan the water column or benthos, and one requiring high speed to pursue prey. These two strategies depend on the two main habitats of their prey: pelagic or demersal.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The maximum speed of predators is an important element in prey-predator interactions (Bell 1991). Information about foraging speeds is particularly valuable when the impact of a predator species upon a community of prey has to be defined. This is the case for the great cormorant, a piscivorous, diving bird which feeds on 78 fish species, distributed across 24 families (Carss et al. 2003; Russell et al. 1996). The European great cormorant populations increased sharply over the last 20 years [they have surged, for instance, from 800 pairs in the Netherlands in the 1960’s to a current estimate of 150,000 pairs (Carss et al. 2003)]. There is a growing concern today that these populations of predators may interact negatively with fisheries by reducing catches and damaging fish stocks. The international research consortium Reducing the Conflict between Cormorants and Fisheries on a pan-European scale (REDCAFE, Carss et al. 2003), set out to assess the impact of cormorant populations on freshwater stocks and to propose management plans. The REDCAFE compiled an extensive suite of information collected by experts from diverse disciplines on the interactions between fish and cormorants in natural conditions. Among the key questions noted in the REDCAFE report, accurate determination of the foraging activity of cormorants is critical to understanding their level of predatory activity.
Knowledge of the underwater behaviour of these birds, especially the foraging speed, remains extremely limited. Until now, swim speed attainable by cormorants was either measured on captive animals swimming in water canals (e.g. Schmid et al. 1995), or estimated based on observation of free-ranging individuals (e.g. Wilson and Wilson 1988; Hustler 1992). With recent advances in bio-logging technologies, by which the activity of free-ranging animals is monitored by miniature electronic devices (cf. Ropert-Coudert and Wilson 2005), it is now possible to monitor continuously the swim speed of free-ranging seabirds (e.g. Ropert-Coudert et al. 2002). Here, we provide the first account of the speed at which great cormorants Phalacrocorax carbo swim in the wild, using miniaturized data-loggers.
Materials and methods
Loggers were deployed on six males and six females of great cormorants raising chicks on Qeqertaq island (69°30′N, 54°05′W) in the Diskofjord area, Disko, West-Greenland during June/July 2003.
Swim speed, depth and temperature were measured with 12-bit resolution, three-channel UWE200-PDT loggers (102 mm long, 20 mm in diameter and weighing 50 g, Little Leonardo, Japan) with 16 Mb memory. Depth and temperature ranges of the loggers were 0–200 m and from −22 to +50°C. The loggers had a relative accuracy of 0.05 m for depth and 0.1°C for temperature. Speed was measured via the number of rotations of a propeller mounted at the front end of the logger. The number of rotations per second was further converted into actual flow speed (in m s−1) following the method of Blackwell et al. (1999), where the number of revolutions of the propeller per second is regressed against change in depth (Δd) measured by the pressure sensor of the data-logger. When animals dive vertically, the swimming speed equals Δd per unit time. A non-linear, least-squares (using the Levenberg-Marquardt algorithm, Press et al. 1988) equation relating the lowest number of rotations per second to Δd was determined for each animal. Speed and depth data were recorded every second.
Birds were caught at the nest site using a noose mounted onto a telescopic pole. Sexes were identified using voice characteristics (males perform alarm calls when approached, females are mute). We covered the head of each individual with a black hood to reduce stress. Birds were weighed with a spring balance to the nearest 10 g, and the following morphometrics were measured to the nearest millimeter using calipers and rulers: tarsus length, wing length, beak length and depth. Handling lasted less than 10 min in all cases. Each device was attached to the cormorants with four strips of waterproof TESA tape to the lower back, parallel to the main axis of the body, a position which minimizes the drag caused by the logger (Bannasch et al. 1994). Birds were released in the vicinity of the colony. All of them were back onto the nest within 5 min.
To assess a possible impact of the swim speed logger on the bird’s performance, we compared the descent and ascent rates (vertical velocity) of birds with swim speed loggers attached to their backs with that of a group equipped with miniature, cylindrical, time-depth recorders (M190-DT, 12 bit resolution, 49×15 mm, 14 g, Little Leonardo, Tokyo, Japan) attached underneath the tail (where drag is assumed to be negligible). These time-depth recorders were deployed on great cormorants from the same colony, at the same breeding stage and at the same time of the year in 2004. Note that vertical velocities derived from depth data were only used to compare the performances of birds with swim speed loggers and those of birds with time-depth recorders. All other swim speed values throughout this paper refer to actual swim speed as calculated from the number of rotations of the propeller of the swim speed loggers.
All data loggers were retrieved after 2 days of deployment except for one bird for which the deployment lasted 1 day. Over the deployment period, the birds performed several foraging bouts. A bout was defined as a sequence of continuous diving activity where dives were not separated by more than 10 min. The start and end of bouts were further determined using the speed profiles: before and after each diving bout, continuous speed traces with no dive profiles were observed, corresponding to flights between foraging and roosting sites.
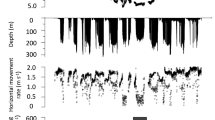
Three categories of dives were identified based on their depth profiles (Fig. 1). Square-shaped dives had acute descent and ascent rates and a constant depth at the bottom phase of the dive (maximum amplitude of the depth changes <0.3 m, which is the minimum value recorded during what corresponded visually to a descent phase, cf. Ropert-Coudert et al. 2002, A. Kato et al. in press). This threshold value (i.e. end of descent and start of ascent) was determined by visual inspection of the dive profile. In addition, V-shaped and W-shaped dives were defined based on the absence or presence, respectively, of undulation (maximum amplitude of depth change >0.3 m) in the depth profiles (cf. Wilson 1995). Only dives to >1 m depth were considered for analysis. Therefore, some information about shallow dives <1 m may have been lost. Dive parameters (maximum depth, dive duration and proportion of dive types) were first calculated for each bout and then averaged per bird.

Phalacrocorax carbo carbo. Depth and swim speed profiles of the three categories of dive exhibited by great cormorants foraging in Greenland. a Square-shaped dive; b V-shaped dive and c W-shaped dive
Speed was averaged over two phases of the dive: the descent and the bottom phases of the dive, the latter being subsequently referred to as foraging phase. The speed during the ascent phase was excluded from the analysis because, as often occurs in seabirds (e.g. Sato et al. 2002; Ropert-Coudert et al. 2004), a non-negligible part of the ascent phase was passive, with birds gliding up to the surface using buoyancy only, often keeping their body horizontal during the ascent. Because each speed value was calculated over 1 s, descent speeds were calculated only if descent phases lasted >2 s.
Variables with only one value per individual (e.g. number of dives per trip, total underwater time, etc.) were compared with Student t-test. In other tests, we used the residual maximum likelihood analyses (REML; Patterson and Thompson 1971) with individual as random effect in order to control for potential pseudo-replication. Statistical tests were conducted using JMP (SAS Institute Inc., USA, Version 5.1.1J), Systat (SAS Institute Inc., USA, Version 10) and StatView (SAS Institute Inc., USA, Version 5.0J). Differences were considered significant if P<0.05. Values are presented as means ± standard deviation (unless stated otherwise).
Results
All birds were recaptured and all data loggers retrieved. Reliable diving and speed data were obtained for 12 birds, six males and six females. Overall, males were significantly larger and heavier than females (Table 1).
Effect of devices
On average, birds equipped with small time-depth recorders attached underneath the tail descended and ascended the water column quicker than birds equipped with swim speed recorders on their backs (Fig. 2), although descent rates of very shallow (<4 m) and deep dives (>18 m) and ascent rates of dives >16 m did not differ between the two groups of birds.

Phalacrocorax carbo carbo. a Descent rates and b ascent rates of great cormorants with swim speed data-loggers attached to the lower back in 2003 (open circles) and great cormorants with smaller, time-depth recorders in 2004 (closed circles), as a function of the maximum depth of dives. Travelling rates are presented as grand average ± SE. Comparisons between the two groups of birds were performed using t-tests (statistically non-significant results are indicated by n.s.)
Foraging activity of birds
A total of 2,948 dives were recorded over the whole deployment period. Males and females performed a similar number of dives per day and dove to the same maximum depth (Table 2). Similarly, although the body mass of males was 27% greater than that of females, there was no difference between males and females in the average maximum depth of dives (F 1,12=0.03, P=0.87) but the average maximum depth of dives differed between dive types (F 1,2=58.12, P<0.001). W-shaped dives (4.77±2.73 m) were deeper than square-shaped (3.46±2.54 m) and V-shaped dives (3.59±2.86 m). The maximum depth of square and V-shaped dives were not different. Overall, only 3.1% of the dives reached a maximum depth >10 m.
Overall, the maximum swimming speed reached by male and female cormorants in our study were 4.0 and 3.9 m s−1, respectively. These maximum values were attained during the foraging phase of dives. However, high-speed events (>2.5 m s−1) were extremely rare (Fig. 3) as only 2.8 and 1.8% of the total foraging speed of males and females, respectively, were >2.5 m s−1. These high-speed events were brief, lasting about 1–2 s. Note that the exact duration of high-speed events was impossible to ascertain because speed data were sampled at 1 s. The swimming speeds averaged over the whole dive, as well as for each dive phase (Table 3), were much lower and did not differ statistically between male and female cormorants (F 1,12=1.5, P=0.25). Birds travelled down to the depth where prey were likely to be found at an average speed of 1.6±0.5 m s−1 (range: 0.7–2.9 m s−1, n=12), then the speed decreased significantly (F 1,2=1167.6, P<0.001) once birds reached the foraging depth (Fig. 3), being on average 0.8±0.6 m s−1 (range: 0.2–4.0 m s−1, n=12) during the foraging phase of dives, before increasing again up to 1.4±0.7 m s−1 (range: 0.9–3.8 m s−1, n=12) during the ascent. Here again, the sex of the bird did not influence the swim speed observed during different dive phases (F 1,12=0.92, P=0.36). Similarly, there was a significant difference (F 1,1=15.18, P<0.001) between dive types, the foraging speed of W-shaped dive (1.1±0.4 m s−1, n=12) being greater than that of square-shaped dives (0.9±0.4 m s−1, n=12), sex of birds having no effect on the swim speed (F 1,12=1.49, P=0.25).

Phalacrocorax carbo carbo. Frequency distributions of the swim speed recorded during the descent phase (black dots) and the bottom phase of dives (white dots) for (a and c) males and (b and d) females great cormorants (vertical bars indicate SE)
Discussion
Effect of devices
Attaching devices to marine animals affect their swimming performance (Wilson et al. 1986) and to a certain extent, their diving behaviour (Ropert-Coudert et al. 2000). The swim speed loggers (with propellers) accounted for 1.7% of the bird’s body mass, which is well below the 5% threshold beyond which behavioural disruptions are considered to occur in flying seabirds (Croll et al. 1992). However, differences in the descent and ascent rates were found between birds equipped with propeller loggers and birds equipped with time-depth recorders. Although this does not mean the swim speed is affected in the same way (vertical velocity and genuine swim speed generally differ as birds adjust their diving angle to increasing depth, cf. Wilson et al. 1995; Ropert-Coudert et al. 2002), our measurements should be taken with caution. We usually deploy data loggers underneath the tail of cormorants, where they have minimal impact on drag (Grémillet et al. 1999). However, speed measurements require that the propeller be placed so as to face the water stream. In that sense, it is more or less impossible to use such data loggers with no impact on bird biomechanics.
Travelling speed comparison with other cormorant species
Our results represent, to our knowledge, the first direct recording of the swimming speed of free-ranging cormorants over complete foraging sessions. The foraging speeds of P. carbo lucidus have been visually estimated to average 1.5 m s−1 and to reach 2.0 m s−1 (Junor 1969, cited in Cramp and Simmons 1977). Wilson and Wilson (1988) estimated speeds of 4 m s−1 for P. carbo lucidus near the seabed, although the foraging speed depended on bottom topography and was positively correlated with depth. In the Netherlands, foraging cormorants were reported to reach swim speeds of 1.4 m s−1 (Voslamber and van Eerden 1991). Hustler (1992) measured descent and ascent rates (using the time spent to reach a given depth, between 0.1–10 m deep) of 0.85 and 0.70 m s−1, respectively, in captive Reed cormorants Phalacrocorax africanus and estimated the horizontal swim speed at the bottom phase of dives to be 1.34 m s−1 for this bird. Schmid et al. (1995) working on captive great cormorants P. carbo sinensis swimming in a water canal found that their birds swam on average at 1.51 m s−1 (range 0.9–2.2 m s−1). The range of speed displayed by our birds accords well with that found by Schmid et al. (1995), the slight discrepancy between expected and observed descent speeds probably resulting from the fact that the movements of the captive cormorants of Schmid et al. (1995) were limited by the boundaries of the pool, which forced them to swim horizontally. In contrast, great cormorants during the foraging phase of our study swam on average at much lower speeds than those observed by Wilson and Wilson (1988) or Junor (1969). The ranges of travelling, foraging and burst speeds reached by our birds is presented in Fig. 4 together with the ranges of speeds reached by their main fish prey, as found in the literature.

Phalacrocorax carbo carbo. Foraging (pale orange bars), travelling (orange bars) and maximum swim speed (red bars) of great cormorants in Greenland seen in the perspective of the swim speed of 14 fish species (nine families) commonly preyed upon by cormorants in Europe. The fish speed are presented as ranges of sustained (grey bars), burst (hatched bars) and non-specified (open circles) speed types. References (superscript numbers next to the species names): (1) Sambilay (1990), (2) Froese and Pauly (2003), (3) Jordan, Herbert and Steffensen (2004), (4) Bainbridge (1958), (5) Muus and Dahlström (1974)
Despite males displaying 29–57% higher mean swim speeds than females during the foraging phase (but not the descent phase) of dives (Table 3), these differences were not significant due to high variances. Male Japanese (Phalacrocorax filamentosus) and subantarctic (P. albiventer) cormorants, which are larger than their females, are able to extend their maximum depth and dive duration to reach deeper parts of the water column and feed on different prey (Kato et al. 1999). Male great cormorants with larger bills can also take larger fish than females (Koffijberg and van Erden 1995).
Low speed foraging of Greenland cormorants
After the descent phase, the foraging speed of our birds was drastically reduced, although during short bursts the speed was greater than during descent. A dietary analysis conducted in 2001 and 2002 on Great cormorants breeding in the Diskofjord area revealed that the birds feed mainly on Cottidae, especially Arctic staghorn sculpins (Gymnacanthus tricuspis) and Arctic sculpin (Myoxocephalus scorpioides); these two items accounted for 60–75% of prey taken during these two breeding seasons. The rest of the diet comprised Osmeridae such as capelin (Mallotus villosus), and Gadidae (Gadus sp.) (Grémillet et al. 2004). Osmeridae and Gadidae are demersal, with capelin generally being found near the coast in shallow waters, while sculpins are bottom-dwelling. The predominance of square-shaped dives (indicator of benthic diving activity, cf. Ropert-Coudert et al. 2002) accords well with the birds’ diet, and confirms that Greenland great cormorants preferentially seek prey near or on the seabed. Such dive patterns were also recorded in European Great cormorants (Grémillet et al. 1999), although these birds also feed regularly in the water column (Grémillet et al. 1998). Regarding the low speed recorded in great cormorants in Greenland, it is important to note that the speed range, especially burst speed, of various benthic and pelagic fish species is reduced when water temperature decreases (e.g. O’Steen and Bennett 2003). For instance, the maximum burst speed during fast starts of a short-horned sculpin (Myoxocephalus scorpius) pursuing a prey can reach 0.8 m s−1 but this speed decreases by 33% when water temperature drops from 15 to 5°C (Beddow et al. 1995). Detailed measurements of burst and glide velocities performed on three captive short-horned sculpins, the dominant item in the diet of great cormorants in Greenland, swimming in 4.5°C water have revealed that the fastest escape response (fast start) reached by these fish was on average 0.73 m s−1, although an average burst speed of 2.36 m s−1 was observed over a 260 ms period (Jordan et al. 2005). As the water temperature in Greenland ranged 3–7°C during our study period, a sculpin prey would be expected to use similar escape speeds, i.e., up to 2.36 m s−1. This is still well below the maximum burst speeds attained over 1-s periods by great cormorants during the foraging phase of dives (4.0 and 3.9 m s−1).
In summary, our study shows that, for mean dive depths of 4.7 m, swim speeds of cormorants swimming horizontally during the bottom phases of dives ranged on average from 0.2 to 1.4 m s−1. Cormorants thus swim comparatively slower than other diving, fish-eating birds, such as penguins (e.g. Adélie penguin Pygoscelis adeliae, 1.6–1.7 m s−1, Ropert-Coudert et al. 2002, Wilson et al. 2002). Unlike penguins, cormorants seem to combine two searching strategies that depend on the habitats of their prey (see Grémillet et al. 1998). One strategy involves scanning the water column (to a much lesser extent than do penguins) for schools of pelagic prey. Another one involves searching along the seabed for stationary, cryptic prey. Once prey are detected, pelagic prey will be more difficult to capture because escape movements can be performed in three dimensions, and schooling behaviour can confuse predators (Pitcher and Parrish 1993). While pelagic prey require active pursuit after detection, pursuit after detection is less important for prey that use crypsis to avoid predation. For such stationary prey, the ability of cormorants to strike rapidly with their long necks might be a way to capture food without extended pursuit. The main foods of Greenland cormorants are cryptic demersal fish. Detecting such cryptic prey may not take more time or energy than finding pelagic prey, and after detection, more time and energy is probably needed to isolate pelagic prey from schools and subsequently pursue them. These factors may explain why Greenland cormorants have been shown to be highly efficient predators (foraging efficiency being defined as mass of prey caught per unit time spent underwater, see Grémillet et al. 2004), more efficient even than penguins (Grémillet 1997).
References
Bainbridge R (1958) The speed of swimming as related to size and to the frequency and amplitude of the tail beat. J Exp Biol 35:109–133
Bannasch R, Wilson RP, Culik BM (1994) Hydrodynamic aspects of design and attachment of a back-mounted device in penguins. J Exp Biol 194:83–96
Beddow TA, van Leeuwen JL, Johnston IA (1995) Swimming kinematics of fast starts are altered by temperature acclimation in the marine fish Myoxocephalus scorpius. J Exp Biol 198:203–208
Bell WJ (1991) Searching behaviour: the behavioural ecology of finding resources. Chapman & Hall, London
Blackwell SB, Haverl CA, Le Boeuf BJ, Costa DP (1999) A method for calibrating swim-speed recorders. Mar Mamm Sci 15:894–905
Carss DN, Bregnballe T, Keller TM, van Eerden M (2003) Reducing the conflict between Cormorants Phalacrocorax carbo and fisheries on a pan-European scale: REDCAFE opens for business. Vogelwelt 124:299–307
Cramp S, Simmons KEL (eds) (1977) Handbook of the Birds of Europe, the Middle East and North Africa. The Birds of the Western Palearctic, vol 1. Oxford University Press, Oxford
Croll DA, Gaston AJ, Burger AE, Konof D (1992) Foraging behavior and physiological adaptation for diving in Thick-billed murres. Ecology 73:344–356
Froese R, Pauly D (2003) FishBase. World Wide Web electronic publication. (http//www.fishbase.org), version 14 April 2004
Grémillet D, Argentin G, Schulte B, Culik BM (1998) Flexible foraging techniques in breeding Cormorants Phalacrocorax carbo and Shags Phalacrocorax aristotelis: benthic or pelagic feeding? Ibis 140:113–119
Grémillet D (1997) Catch per unit effort, foraging efficiency and parental investment in breeding Great Cormorants (Phalacrocorax carbo carbo). ICES J Mar Sci 54:635–644
Grémillet D, Wilson RP, Gary Y, Storch S (1999) Three-dimensional space utilization by a marine predator. Mar Ecol Prog Ser 183:263–273
Grémillet D, Kuntz G, Delbart F, Mellet M, Kato A, Robin J-P, Chaillon P-E, Gendner J-P, Lorentsen S-H, Le Maho Y (2004) Linking the foraging performance of a marine predator with local prey abundance. Funct Ecol 18:793–801
Hustler K (1992) Buoyancy and its constraints on the underwater foraging behaviour of Reed Cormorants Phalacrocorax africanus and Darters Anhinga melanogaster. Ibis 134:229–236
Jordan AD, Herbert NA, Steffensen JF (2005) Escape performance in three teleosts from West Greenland. Polar Biol 28:164–167
Kato A, Watanuki Y, Shaughnessy P, Le Maho Y, Naito Y (1999) Intersexual differences in the diving behaviour of foraging subantarctic cormorant (Phalacrocorax albiventer) and Japanese cormorant (P. filamentosus). C-R Acad Sci Paris 322:557–562
Koffijberg K, van Eerden MR (1995) Sexual dimorphism in the cormorant Phalacrocorax carbo sinensis: possible implications for difference in structural size. Ardea 83:37–46
Muus BJ, Dahlström P (1974) Collins guide to the sea fishes of Britain and North-Western Europe. Collins, London
O’Steen S, Bennett AF (2003) Thermal acclimation effects differ between voluntary, maximum, and critical swimming velocities in two cyprinid fishes. Physiol Biochem Zool 76:484–496
Patterson HD, Thompson R (1971) Recovery of inter-block information when block sizes are unequal. Biometrika 58:545–555
Pitcher TJ, Parrish JK (1993) Functions of shoaling behaviour in teleosts. In: Pitcher TJ (ed) Behaviour of Teleost Fishes, 2nd edn. Chapman & Hall, London, pp 369–439
Press WH, Flannery BP, Teukolsky SA, Vetterling WT (1988) Numerical Recipes in C. Cambridge University Press, Cambridge
Ropert-Coudert Y, Bost C-A, Bevan RM, Handrich Y, Le Maho Y, Woakes A, Butler PJ (2000) Impact of externally attached logger on the diving behaviour of the King penguin (Aptenodytes patagonicus). Physiol Biochem Zool 74:438–444
Ropert-Coudert Y, Kato A, Baudat J, Sato K, Bost C-A, Le Maho Y, Naito Y (2002) Swim speed of free-ranging Adélie penguins, Pygoscelis adeliae, and relation to the maximum depth of dives. J Avian Biol 33:95–99
Ropert-Coudert Y, Grémillet D, Ryan PG, Kato A, Naito Y, Le Maho Y (2004) Between air and water: the plunge dive of the Cape Gannet Morus capensis. Ibis 146:281–290
Ropert-Coudert Y, Wilson RP (2005) Trends and perspectives in animal-attached remote-sensing. Front Ecol Environ 3(8):437–444
Russell IC, Dare PJ, Eaton DR, Armstrong JA (1996) Assessment of the problem of fish-eating birds in inland fisheries in England and Wales. Report to the Ministry of Agriculture, Fisheries and Food (MAFF Project VC0104)
Sambilay VC Jr (1990) Interrelationships between swimming speed, caudal fin aspect ratio and body length of fishes. Fishbyte 8:16–20
Sato K, Naito Y, Kato A, Niizuma Y, Watanuki Y, Charrassin J-B, Bost C-A, Handrich Y, Le Maho Y (2002) Buoyancy and maximal dive depth in penguins: do they control inhaling air volume? J Exp Biol 205:1189–1197
Schmid D, Grémillet D, Culik BM (1995) Energetics of underwater swimming in the Great Cormorant (Phalacrocorax carbo sinensis). Mar Biol 123:875–881
Voslamber B, van Eerden MR (1991) The habit of mass flocking fishing by cormorants Phalacrocorax carbo sinensis at the IJsselmeer, The Netherlands. In: van Eerden MR, Zijlstra M (eds) Proceedings Workshop 1989 on Cormorants Phalacrocorax carbo. Rijkswaterstaat Directorate Flevoland, Lelystad, pp 182–191
Wilson RP (1995) Foraging ecology. In: Perrins C, Bock W, Kikkawa J (eds) Bird families of the world: the penguins spheniscidae. Oxford University Press, Oxford, pp 81–106
Wilson RP, Culik BM, Peters G, Bannasch R (1996) Diving behaviour of Gentoo penguins, Pygoscelis papua; factors keeping dive profiles in shape. Mar Biol 126:153–162
Wilson RP, Ropert-Coudert Y, Kato A (2002) Rush and grab strategies in foraging marine endotherms: the case for haste in penguins. Anim Behav 63:85–95
Wilson RP, Grant WS, Duffy DC (1986) Recording devices on free-ranging marine animals: does measurement affect foraging performance? Ecology 67:1091–1093
Wilson RP, Wilson M-PT (1988) Foraging behaviour of four sympatric cormorants. J Anim Ecol 57:943–953
Acknowledgements
This study was funded by the Institut Polaire Français Paul-Emile Victor through the Grant N°388 to DG and by the Centre National de la Recherche Scientifique. The Arctic Station in Godhavn provided logistics support throughout repeated field seasons on Disko. The experiments comply with the current laws of Greenland and the experimental procedure was validated by the ethics committee of the French Polar Institute, The Greenland Homerule Government, the Danish veterinary services, the Danish Polar Center, and the science board of Arctic station. We thank C. Gilbert, E. Pettex, C. Devred and G. Bastholm for their help in data collection; J. Metcalfe, I. Russell, R. Williams and A. Jordan for sharing information about fish swim speed; Prof. Y. Naito for kindly providing us with the swim speed data loggers. Finally, three anonymous referees considerably helped us improving the manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by S. Nishida, Tokyo
Rights and permissions
About this article
Cite this article
Ropert-Coudert, Y., Grémillet, D. & Kato, A. Swim speeds of free-ranging great cormorants. Mar Biol 149, 415–422 (2006). https://doi.org/10.1007/s00227-005-0242-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00227-005-0242-8