
Abstract
The shape of a target object could influence maximum grip aperture in human grasping movements in several different ways. Maximum grip aperture could be influenced by the required precision of digit placement, by the aim to avoid colliding with the wrong parts of the target objects, by the mass of the target objects, or by (mis)judging the width or the volume of the target objects. To examine the influence of these five factors, we asked subjects to grasp five differently shaped target objects with the same maximal width, height and depth and compared their maximum grip aperture with what one would expect for each of the five factors. The five target objects, a cube, a three-dimensional plus sign, a rectangular block, a cylinder and a sphere, were all grasped with the same final grip aperture. The experimentally observed maximum grip apertures correlated poorly with the maximum grip apertures that were expected on the basis of the required precision, the actual mass, the perceived width and the perceived volume. They correlated much better with the maximum grip apertures that were expected on the basis of avoiding unintended collisions with the target object. We propose that the influence of target object shape on maximum grip aperture might primarily be the result of the need to avoid colliding with the wrong parts of the target object.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Humans have the capacity to grasp a target object in many different ways. Yet, they show characteristic movement patterns. Differences between movement patterns under different circumstances can reveal how various variables are taken into account when planning a grasping movement. One of these variables is target object shape, the focus of the present paper. It has repeatedly been shown that target object shape influences the maximum grip aperture (MGA) for a certain distance between the final positions of the digits (Zaal and Bootsma 1993; Cuijpers et al. 2004; Eloka and Franz 2011; Hu et al. 1999; Borchers et al. 2014).
In this study, we test several explanations for why MGA depends on target object shape: because the shape influences the desired precision of the digits’ final positions (‘desired precision,’ Smeets and Brenner 1999), because humans have the objective to avoid collisions between the digits and other parts of the target object than the goal positions (‘collision avoidance,’ Cuijpers et al. 2004; Borchers et al. 2014; Verheij et al. 2012), because the grip aperture scales with target object mass (Eastough and Edwards 2007), or because, if a target object is grasped along its width, MGA is not scaled to the actual width of the target object but to the perceived width (‘perceived width,’ Franz 2001; Franz et al. 2000, 2001) or to the perceived volume (‘perceived volume,’ Borchers et al. 2014). In the following paragraphs, we will address these five explanations and their explanatory value.
Desired precision
Planning how to grasp a target object starts by selecting suitable positions on the target object’s surface, after which the digits are moved toward these goal positions (Smeets and Brenner 1999). To determine suitable positions on the target object’s surface, the target object’s shape is taken into account to ensure a stable grasp (Cuijpers et al. 2004). Because human movements are variable, the digits will not always end exactly at these selected goal positions. The size of the surface available for digit placement influences how important it is to end close to the selected goal positions. A strategy to increase the precision is to approach the target object’s surface more perpendicular, leading to a larger MGA (Smeets and Brenner 1999). This strategy is used when the movement variability is large, for example, in fast movements or movements without predictably available visual feedback (Wing et al. 1986; Jakobson and Goodale 1991), or when the desired precision is large. MGA can therefore be expected to be influenced by target object shape through the size of the surface on the target object available for digit placement and any other variables that influence the desired precision.
Desired precision can explain why oblate target objects (cylindrical target objects from which two parts are removed so that the target object becomes a bar with two rounded sides with small grasp surfaces) are grasped with a larger MGA than full cylinders (with large grasp surfaces) (Zaal and Bootsma 1993) and why slender bars grasped at their ends (small grasp surfaces) are grasped with a larger MGA than disks (large grasp surfaces) (Eloka and Franz 2011). However, it cannot explain why the MGA increases with the length of the axis orthogonal to the axis that is grasped when grasping an elliptic cylinder at its short axis (Cuijpers et al. 2004) or why MGA scales with target object height but not with target object depth (Hu et al. 1999; Borchers et al. 2014).
Collision avoidance
Cuijpers et al. (2004) proposed that the objective to avoid collisions between the digits and other parts of the target object than the goal positions also influences MGA. They based this proposal on an experimental finding that could not be explained by desired precision. They found that when grasping an elliptic cylinder the increase in MGA with target object size depends on the length of the axis orthogonal to the axis that is grasped. They suggested that when elliptical cylinders are grasped by their short axis, the protruding parts of the orthogonal major axis act as obstacles, giving rise to a larger MGA. In the study of Borchers et al. (2014), our grasping model (Verheij et al. 2012), in which the idea of collision avoidance is implemented, was used to examine whether collision avoidance could explain why MGA scales with target object height but not with target object depth. In line with the experimental findings, our model predicted an increase in MGA with target object height. In contrast to the experimental findings, our model also predicted an increase in MGA with target object depth, although the predicted effect of target object depth on MGA was smaller than the predicted effect of target object height. Collision avoidance can thus partially explain the findings of Hu et al. (1999) and Borchers et al. (2014).
Mass
Eastough and Edwards (2007) found that heavy cylinders are grasped with a large MGA than light cylinders of the same dimensions. Based on this finding, one might expect that target object shape influences MGA because target object shape influences target object mass. However, it should be noted that Weir et al. (1991) did not find an effect of target cylinder weight on MGA. Differences in mass can explain some effects of target shape, for instance, why the MGA increases with the length of the axis orthogonal to the axis that is grasped when grasping an elliptic cylinder at its short axis (Cuijpers et al. 2004). However, it cannot explain why oblate target objects (relatively low mass) are grasped with a larger MGA than full cylinders (relatively high mass) (Zaal and Bootsma 1993), why slender bars grasped at their ends (relatively low mass) are grasped with a larger MGA than disks (relatively high mass) (Eloka and Franz 2011) or why MGA scales with target object height but not with target object depth (Hu et al. 1999; Borchers et al. 2014).
Perceived width or volume
One might expect MGA to only scale with the true size of the dimension along which the target object is grasped (e.g., Aglioti et al. 1995; Brenner and Smeets 1996; Haffenden and Goodale 1998), but there is evidence that MGA also scales with the perceived size of the target object (Franz et al. 2000, 2001; Franz 2001). A likely candidate for a dimension to use to scale ones MGA is perceived width. However, it might be that a more generic measure of object size is used, such as perceived volume. As tall objects are perceived as having more volume than lower objects of exactly the same volume (Raghubir and Krishna 1999; Wansink and Van Ittersum 2003), using perceived volume might explain why, while grasping target objects along their width, MGA scales with target object width and target object height but not with target object depth (Borchers et al. 2014).
Aim
In this study, we aimed to get more insight into the role of desired precision, collision avoidance, mass, perceived width and perceived volume in influencing the MGA. We performed an experiment in which subjects grasped five differently shaped target objects with the same maximal width, height and depth and that were grasped with the same final grip aperture. The predicted effect of collision avoidance was based on simulations with the grasping model of Verheij et al. (2012). We based our predictions for the effects of the four other explanations on measures independent of the digits’ trajectories: the variance in the endpoints of the digits in the grasping experiment (desired precision), the actual mass of the target objects and the perceived width and volume of the target objects as judged in two psychophysical experiments involving large groups of subjects. To evaluate the relative explanatory value of the five explanations, we calculated the squared correlation coefficient between the predicted MGAs and the experimentally measured MGAs for each explanation.
Methods
Grasping experiment
Subjects
Nine naive right-handed subjects took part in the experiment (6 females, 3 males) ranging in age from 22 to 44 years (mean = 30 years, SD = 7.7 years). The experiment was part of a program that was approved by the local ethics committee. Before participating, subjects signed an informed consent form.
Experimental setup and procedure
The experiment consisted of a grasping task performed with free vision. Subjects sat on a stool. At the start of each trial, their hand rested on a table and their index finger and thumb were touching each other at a starting position located 20 cm to their right and 10 cm in front of the center of their trunk. They were presented with a wooden target object, which was placed on the table, 40 cm in front of the starting position (Fig. 1).

Experimental setup (target object ‘plus’)
There were five different target objects. The expected effects of desired precision, collision avoidance, mass, perceived width and perceived volume on MGA differed for this set of target objects. We used a cube (‘cube’), a three-dimensional plus sign (‘plus’), a rectangular block (‘block’), a cylinder (‘cylinder’) and a sphere (‘sphere’) (Fig. 2). The dimensions and orientation of each target object were such that its height, width (the dimension along which the target object is grasped) and depth (the horizontal dimension perpendicular to the width) were all 6.0 cm. The 4.24 × 4.24 × 6.0 cm ‘block’ was grasped by the 6.0-cm-long vertical edges that were 6.0 cm apart. The ‘plus’ was made of 6.0 cm beams with a cross-sectional area of 0.76 × 0.84 cm. The area available for digit contact was much smaller for the plus and the block than for the cube, the cylinder and the sphere. The masses of the objects were 149, 7, 76, 111 and 80 g for the cube, plus, block, cylinder and sphere, respectively. Each subject performed 12 trials per target object. Thus in total, there were 60 trials per subject. These 60 trials were presented in a different random order for each subject.

Target objects. From left to right ‘cube,’ ‘plus,’ ‘block,’ ‘cylinder’ and ‘sphere’
Subjects were instructed to reach and grasp the target object at a natural movement speed using the index finger and thumb of their right hand, to lift it, and then put it back at the same location. To ensure that subjects grasped the target object by positions that were 6 cm apart, they were instructed to grasp the ‘plus’ at the ends of the horizontal beam perpendicular to the main movement direction and to grasp the ‘block’ at the two vertical side edges. The subjects were also instructed to grasp the ‘cube’ by its side surfaces. This was necessary because grasping the cube by its front and back surfaces rather than by its left and right surfaces will, according to our grasping model (2012), yield a different MGA for the same target object if collision avoidance is a major factor. Subjects began their grasping movement when they heard a verbal ‘go’ signal.
Movements were recorded at 100 Hz with an Optotrak 3020 motion recording system (Northern Digital, Waterloo, ON, Canada). Single infrared emitting diodes (IREDs) were attached to the nails of the subject’s index finger and thumb and to the subject’s wrist (proc. styloideus ulnae).
Data analysis
The start of the grasping movement was defined as the moment at which the velocities of the tip of the thumb and the tip of the index finger both exceeded 0.1 m/s. The end of the grasping movement was defined using the Multiple Sources of Information method (Schot et al. 2010). We used the criteria that both the index finger and thumb are within 30 mm of the target object’s center in the sagittal direction and <70 mm above the table, that the aperture is decreasing, that the second derivative of aperture is positive, that the mean of the velocities of the thumb and index finger is low (the objective function was 1 for zero velocity and decreased linearly to 0 for the maximum velocity) and that the movement time is short (the objective function was 1 for the start of the movement and decreased linearly to 0.8 for the last sample). We rejected the trial if the endpoint was not found using this paradigm or if there were more than two consecutive missing samples between the start and end of the grasping movement for the thumb, the index finger or the wrist. Together, this resulted in the rejection of 14 of the 540 trials. Isolated or pairs of missing samples were reconstructed using linear interpolation.
In order to get an overview of the movement trajectories of the digits and of the wrist, we constructed a top view of the trajectories by plotting the average sagittal component against the average lateral component. Because the number of samples varied across trials, we resampled the data of each marker for each trial such that each step corresponds to 1 % of the path length of the concerning marker before averaging. We calculated the means of the resampled trajectories per subject, marker and target object and averaged these mean trajectories across the subjects.
To examine the influence of target object shape on MGA, we calculated the MGA for each trial as the maximum distance between the marker placed on the index finger and the marker placed on the thumb in the interval between movement start and movement end. We subsequently calculated for each subject the mean MGA per target object. The effect of target object shape on MGA was tested using a one-way repeated-measures analysis of variance (ANOVA) with factor: target object shape (five levels). Next, we averaged these mean MGAs across subjects in order to be able to calculate the correlation coefficients (across target object shapes) between the mean predicted MGAs and the experimentally found mean MGAs.
Predictions
For collision avoidance, we used model simulations to generate predictions (Verheij et al. 2012). The four other explanations are based on a single variable: desired precision, mass, perceived width and perceived volume. In order to predict the MGA for the various target objects for each of these four explanations, we quantified the relevant variables for each target object on a scale that was normalized so that the value for the relevant variable was 1.0 for the cube. Based on these normalized values and the MGA that was found for the cube, we predicted the MGA for the other four target objects. The details of this method are explained in the remainder of this subsection.
Normalized desired precision
Assuming that our subjects succeeded in achieving the desired precision, desired precision is reflected in the variability of the endpoints. To quantify this variability, we determined the surface area of the 95 % endpoint confidence ellipses (Messier and Kalaska 1997, 1999) for the thumb and index finger per subject and condition. In order to calculate this surface area, we used the final positions of the digit in the sagittal direction and it’s final heights. We defined ‘desired precision’ as 1 divided by the average of the surface area of the ellipse for the thumb and the ellipse for the index finger, so that the value for desired precision increases when the variability of the endpoints decreases.
The normalized desired precision was calculated per subject and condition by dividing the desired precision for each condition by the desired precision for the ‘cube.’
The MGA that is needed to acquire the desired precision might depend on the variability of the movement and thus on movement speed. Therefore, one might expect that faster movements require a larger MGA (Wing et al. 1986; Jakobson and Goodale 1991), even though the same desired precision is acquired. We checked for this by calculating the mean movement time per condition and calculating the squared correlation coefficient (r 2) between these mean movement times and the mean MGAs.
Collision avoidance
To evaluate how collision avoidance is reflected in behavior, we used the grasping model of Verheij et al. (2012) in which the objective of collision avoidance is implemented. In this model, two point masses, representing the tips of the index finger and the thumb, move in a force field. We will refer to these points as ‘tips.’ The force field is the sum of multiple forces that each represent one or two objectives that hold for each tip.
The model predicts an influence of target shape on MGA because one of the model’s assumptions is that the influence of the objective to avoid collisions between the digits and surfaces depends on how the digits move relative to these surfaces. For example, the drive to avoid contacting a surface increases when the distance between the surface and the digit decreases and when the digit’s movement direction is more toward the surface.
We did not fit the model’s parameter values to the experimental data, but we used the same values for the parameters A, R o, K, E and D as in the paper in which we introduced the model (Verheij et al. 2012). In that study, the values for the parameters were chosen such that the simulated kinematics was in line with the experimentally found kinematics in a study of Jeannerod (1981). The parameter A sets the strength of the objective to arrive at the preselected goal position. The parameter R o sets the strength of the objective to avoid collision with obstacles or positions on the target object other than the goal position. The parameters K and E set the strengths of the objectives to prevent collisions between the tips and limit the distance between the tips. The parameter D sets the strength of the objective to move smoothly and arrive simultaneously with both tips.
One of the objectives originally implemented in the model was that humans avoid collisions between their digits and the table’s surface. This objective mainly caused the vertical curvature of the predicted movement. It did so to an extent that is set by the parameter R t . In this study, we changed the value of R t to zero because we experimentally found that the table does not affect the vertical curvature, but that the curvature is mainly caused by local constraints at the start of the movement (Verheij et al. 2013). In line with that finding, we added an upward ‘force’ of 4 m/s2 to the force field if the tip was lower than 5 mm. These values (4 m/s2 and 5 mm) and the abrupt transition between the force being active and no longer being active (instead of a gradually changing force) are rather arbitrary. Since the quantitative model predictions will depend on the values for the parameters and we do not claim to use the most appropriate set of parameters, we are primarily interested in the model’s qualitative predictions.
For the model simulations, the target object’s dimensions and its position relative to the starting position were set in accordance with the experimental setup. The locations of the goal positions, to which the tips are attracted, are given as an input to the model. For each target object, the goal positions for the tips were chosen based on the experimentally observed final positions of the digits, averaged across subjects. These experimentally found positions were not located exactly on the target object’s surface because the markers were attached to the nails, so that the digits were between the markers and the target objects. We corrected for this using the knowledge of the experimental geometry.
Mass
The mass of each target objects was determined with a balance. The normalized mass was calculated by dividing each of the five masses by the mass of the ‘cube.’
Normalized perceived width
We determined the perceived width of the five target objects used in the grasping experiment by asking fifty naive subjects (32 females, 18 males) ranging in age from 18 to 73 years (mean = 25 years, SD = 12 years) to quantify the perceived width of each target object. None of the subjects had participated in the grasping experiment. We tested different subjects because asking the same subjects to judge the perceived width before the grasping experiment would direct their attention to perceived width (which might possibly influence MGA) and asking them to judge the width after they grasped the objects would give them additional information about the target objects’ widths from having grasped the objects.
The five target objects were each presented once, in a random order, at the same position relative to the subject as in the grasping experiment. The subjects were not allowed to touch the target objects. To quantify the perceived width, the subject could either use an existing unit or a self-chosen unit that scaled linearly with perceived width. The normalized perceived width was calculated per subject by dividing each of the five reported values by the value reported for the ‘cube.’
Normalized perceived volume
We determined the perceived volume of the five target objects used in the grasping experiment by asking fifty naive subjects (27 females, 23 males) ranging in age from 18 to 58 years (mean = 31 years, SD = 9.6 years) to quantify the perceived volume of each target object. None of the subjects had participated in the grasping experiment or in the experiment in which the width had to be judged (for the same reasons as those given in the section ‘Normalized perceived width’).
The five target objects were each presented once, in a random order, at the same position relative to the subject as in the grasping experiment. The subjects were not allowed to touch the target objects. To quantify the perceived volume, the subject could use either an existing unit or a self-chosen unit that scaled linearly with perceived volume. The normalized perceived volume was calculated per subject by dividing each of the five reported values by the value reported for the ‘cube.’
From various values to predictions
The normalized values for desired precision, mass, perceived width and perceived volume were converted into predictions for the MGA in cm using the following equation:
We multiplied the normalized value by 0.8 and 6 because in the literature, it has been reported that MGA scales with target object size with a slope of around 0.8 (Smeets and Brenner 1999) and the size (width) of the target objects that we used was 6 cm. We added 6.82 cm to ensure that the predicted MGA will be equal to the experimentally found MGA for the ‘cube.’ For each prediction that was based on measurements on subjects (desired precision, perceived width and perceived volume), we calculated the predictions per subject and condition, and subsequently averaged them across subjects of the concerning experiment, resulting in one predicted MGA with associated standard error of the mean per explanation and condition.
Our prediction for obstacle avoidance was not based on a normalized value. In order to have a perfect prediction for the cube, we subtracted the difference between our model’s prediction for the MGA for the ‘cube’ and the experimentally found mean MGA (averaged across subjects) for the ‘cube’ (0.34 cm) from all MGAs predicted by our model. Because our model (2012), only predicts one value for the MGA per target object no further averaging was needed. Together, these transformations made it possible to directly compare the relationships between measured and predicted effects of target object shape on MGA across the five explanations.
Testing the predictions
To examine to what extent, the five explanations could account for the experimentally found influence of target object shape on MGA the squared correlation coefficient (r 2) between the mean experimentally found MGAs and the (mean) predicted MGAs was calculated per explanation. The larger r 2, the better the explanation accounts for the experimentally found dependence of MGA on object shape.
Note that the value of the correlation coefficient depends neither on the predictions being precise nor on the slope of the relationship. For desired precision, mass, perceived width and perceived volume the predicted MGAs were calculated by multiplying the normalized values of the concerning factor with a constant and adding another constant. If we would have used other values for the constants or would have used the normalized values directly to calculate the squared correlation coefficients, the values for the squared correlation coefficients would have been exactly the same. Likewise, not subtracting a constant from the MGAs predicted by the model would not have affected the value of the squared correlation coefficient for collision avoidance. Our choice to let the predicted MGA for the ‘cube’ be equal to the experimentally found MGA for the ‘cube’ and our choice of the strength of the relation between MGA and desired precision, mass, perceived width or perceived volume is therefore irrelevant for conclusions based on the correlation coefficients. It only makes it easier to interpret differences between the experimental results and the predictions.
Results
The mean MGAs per subject and target object shape (Table 1) and the top view of the average movement trajectories (Fig. 3) suggest that there was a difference in MGA between the target objects. A one-way repeated-measures ANOVA showed that there was indeed a significant effect of target object shape on MGA (F(4,32) = 30.0, p < 0.001). Post hoc comparison showed that the MGA was significantly larger for the ‘cube’ than for all other target shapes (all p < 0.01), the MGA was significantly smaller for the ‘sphere’ than for all other target shapes (all p < 0.01), and that the MGA did not differ significantly between the ‘plus,’ the ‘block’ and the ‘cylinder’ (all p > 0.6).

Top view of the average trajectories of the wrist (proc. styloideus ulnae), the thumb and the index finger per target object
Note that from all explanations tested, only collision avoidance predicts relatively small differences in MGA between the ‘plus,’ the ‘block’ and the ‘cylinder,’ which is in line with our experimental results. All other explanations predict a relatively large difference between these target objects (Table 1; Fig. 4). The squared correlation coefficient between the mean predicted MGAs and the experimentally found mean MGAs was highest for collision avoidance (r 2 = 0.76, p = 0.05), lowest for desired precision (r 2 = 0.06, p = 0.7) and had intermediate values for mass (r 2 = 0.38, p = 0.3), perceived width (r 2 = 0.29, p = 0.3) and perceived volume (r 2 = 0.33, p = 0.3) (Fig. 4). The p values are the probabilities of getting a correlation as large as the observed value by chance (when the true correlation is zero), so from the five proposed explanations, collision avoidance can explain our results best.

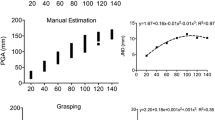
Experimentally measured maximum grip aperture (MGA) as a function of predicted MGA for the proposed explanations: a desired precision, b collision avoidance, c mass, d perceived width, e perceived volume. Note that the axes differ between the panels. Values are averages across subjects for each target. Error bars indicate the associated standard errors (and are only visible if larger than the radius of the point). There are no error bars for the predicted MGAs based on collision avoidance and mass, because we have only one prediction per target object shape. Points on the dashed line indicate that the experimentally measured MGA is equal to the predicted MGA. The way we make the predictions ensures that this is always the case for the ‘cube’
The squared correlation coefficient between the experimentally found mean movement times (Fig. 5) and the experimentally found mean MGAs was low (r 2 = 0.19, p = 0.46), and the correlation was negative (overall larger movement times corresponded to smaller MGAs), so we can reject differences in movement time as a possible explanation of the difference in MGA between object shapes.

Effect of target object shape on movement time. Values are averages across subjects for each target object; error bars indicate the associated standard errors
Discussion
We aimed to get more insight into how target object shape influences MGA. In the introduction, we mentioned that the desired precision of the digit’s final positions (‘desired precision,’ Smeets and Brenner 1999), avoiding collisions between the digits and other parts of the target object than the goal positions (‘collision avoidance,’ Cuijpers et al. 2004; Borchers et al. 2014; Verheij et al. 2012), target object mass (‘mass,’ Eastough and Edwards 2007), and relying on perceived target object width (‘perceived width,’ Franz 2001; Franz et al. 2000, 2001) or volume (‘perceived volume,’ Borchers et al. 2014) might all contribute to the influence of target object shape on MGA. We examined the relative importance of these five explanations by performing an experiment for which the expected outcome differed between these explanations. In our experiment, subjects grasped five differently shaped target objects with the same maximal width, height and depth, with the same final grip aperture. We used a ‘cube,’ a ‘plus,’ a ‘block,’ a ‘cylinder’ and a ‘sphere’. We found that MGA was largest for the ‘cube’ and smallest for the ‘sphere.’ There was no significant difference in MGA between the ‘plus,’ the ‘block’ and the ‘cylinder’.
To quantify the desired precision, we determined the surface area of the 95 % confidence ellipses for the experimentally found endpoints of the digits. To get an estimate of the effect of collision avoidance on MGA, we simulated our experiment with the model of Verheij et al. (2012). To quantify the mass, we used a balance. To quantify the perceived width and the perceived volume, we performed separate experiments in which subjects judged the width and volume of the five target objects that were used in the grasping experiment. Based on these values, we then predicted the MGA and calculated the squared correlation coefficient between the experimentally found and the predicted mean MGAs per explanation. The squared correlation coefficient was low (<0.4) for desired precision, mass, perceived width and perceived volume and much higher (0.76) for collision avoidance. It might very well be that multiple factors are responsible for the effect of object shape on MGA. Whether or not this is the case, the squared correlation coefficients show that variations in desired precision, mass and misperceiving width or volume are unlikely to play major roles in shape-related variations in MGA. The role of collision avoidance cannot be excluded. The importance of collision avoidance awaits further research.
An alternative variable that has been related to MGA is maximum object extent [‘the maximum (diagonal) extent of the object or a diagonal formed by an approximately 45° slice through the object, whichever is less’ (Lee et al. 2008)]. Assuming a vertical slice perpendicular to the grasping surfaces (Mon-Williams and Bingham 2011), this measure cannot explain our findings because it is equal for the ‘cube,’ the ‘block’ and the ‘cylinder’ (8.5 cm), while experimentally, we found that MGA is larger for the ‘cube’ than for the other target objects. Moreover, this measure of object extent is smaller for the ‘plus’ (6.1 cm) than for the ‘block’ and the ‘cylinder,’ while experimentally, we found that the MGA did not differ significantly between the ‘plus,’ the ‘block’ and the ‘cylinder.’
The idea that collision avoidance influences MGA argues against the suggestion that target object distance is treated independently of target object shape in grasping (Jeannerod 1981), because distance and shape must be combined to avoid collisions. Collision avoidance is possible without taking the whole shape of the target object into account, as long as the distance to the relevant surface of the target object is taken into account for each individual digit (Verheij et al. 2012). Thus, the influence of collision avoidance on MGA is consistent with the view that grasping is nothing more than pointing with the individual digits toward selected positions on the target object (Smeets and Brenner 1999).
The MGA that we found for the ‘sphere’ was smaller and that for the block larger than predicted by collision avoidance. One reason for this might be that humans (in contrast with the model of Verheij et al. (2012)) are more determined to avoid collisions with edges than with smooth surfaces and therefore open their hand more when grasping the block (which is grasped at its edges) and less when grasping the sphere (which has no edges). However, MGA may also be influenced by other factors that were not included in the model of Verheij et al.
MGAs for collision avoidance were predicted using a model (Verheij et al. 2012) in which multiple objectives with certain strengths are converted into mathematical formulas with certain parameter values. It might appear evident that a more complex model can predict the data better. However, we did not fit the model’s parameter values to the experimental data. Moreover, in our experiment, we only manipulated target object shape, which only influences grasping via the objective to avoid collision with the target object at positions other than the goal positions. Therefore, only one model parameter, R o, was directly related to the predicted differences in MGA. The alternative explanations for the differences in MGA were all the result of influencing one variable (desired precision, mass, perceived width or perceived volume). For those predictions, the MGA was scaled to the concerning variable, while for collision avoidance, the MGA was not scaled, but was the result of the interaction of multiple implemented objectives. From the explanations tested, collisions avoidance could explain our experimental results best. Therefore, we propose that the MGA is the result of achieving multiple objectives (Verheij et al. 2012), among which the objective to avoid collisions between the digits and the target object at positions other than the goal positions, and is not the result of scaling MGA to a certain variable (Smeets and Brenner 1999) as is often proposed (e.g., Aglioti et al. 1995; Haffenden and Goodale 1998; Jeannerod 1981, 1984).
To examine the effects of object shape on grasping kinematics, we analyzed the MGA. Since we think that the MGA is not explicitly controlled, but follows from the movements of the individual digits (Smeets and Brenner 1999), we might as well have chosen a different measure (e.g., the maximum lateral position of one of the digits). We chose to analyze the MGA because this is often done in grasping studies and therefore makes comparing our work with other studies more straightforward.
In sum, the influence of target object shape on maximum grip aperture is not primarily the result of the required precision, mass, perceived width or the perceived volume of the target object. The influence might largely be the result of the aim to avoid colliding with the wrong parts of the target object.
References
Aglioti S, DeSouza JFX, Goodale MA (1995) Size-contrast illusions deceive the eye but not the hand. Curr Biol 5(6):679–685. doi:10.1016/S0960-9822(95)00133-3
Borchers S, Verheij R, Smeets JBJ, Himmelbach M (2014) The influence of object height on maximum grip aperture in empirical and modelled data. J Exp Psychol Hum Percept Perform 40(2):889–896. doi:10.1037/a0035061
Brenner E, Smeets JBJ (1996) Size illusion influences how we lift but not how we grasp an object. Exp Brain Res 111(3):473–476. doi:10.1007/BF00228737
Cuijpers RH, Smeets JBJ, Brenner E (2004) On the relation between object shape and grasping kinematics. J Neurophysiol 91(6):2598–2606. doi:10.1152/jn.00644.2003
Eastough D, Edwards MG (2007) Movement kinematics in prehension are affected by grasping objects of different mass. Exp Brain Res 176(1):193–198. doi:10.1007/s00221-006-0749-3
Eloka O, Franz VH (2011) Effects of object shape on the visual guidance of action. Vis Res 51(8):925–931. doi:10.1016/j.visres.2011.02.002
Franz VH (2001) Action does not resist visual illusions. Trends Cogn Sci 5(11):457–459. doi:10.1016/S1364-6613(00)01772-1
Franz VH, Gegenfurtner KR, Bülthoff HH, Fahle M (2000) Grasping visual illusions: no evidence for a dissociation between perception and action. Psychol Sci 11(1):20–25. doi:10.1111/1467-9280.00209
Franz VH, Fahle M, Bülthoff HH, Gegenfurtner KR (2001) Effects of visual illusions on grasping. J Exp Psychol Hum Percept Perform 27(5):1124–1144. doi:10.1037/0096-1523.27.5.1124
Haffenden AM, Goodale MA (1998) The effect of pictorial illusion on prehension and perception. J Cogn Neurosci 10(1):122–136. doi:10.1162/089892998563824
Hu Y, Eagleson R, Goodale MA (1999) The effects of delay on the kinematics of grasping. Exp Brain Res 126(1):109–116. doi:10.1007/s002210050720
Jakobson LS, Goodale MA (1991) Factors affecting higher-order movement planning: a kinematic analysis of human prehension. Exp Brain Res 86(1):199–208
Jeannerod M (1981) Intersegmental coordination during reaching at natural visual objects. In: Long IJ, Baddeley A (eds) Attention and performance IX. Lawrence Erlbaum, Hillsdale, pp 153–169
Jeannerod M (1984) The timing of natural prehension movements. J Mot Behav 16(3):235–254
Lee YL, Crabtree CE, Norman JF, Bingham GP (2008) Poor shape perception is the reason reaches-to-grasp are visually guided online. Percept Psychophys 70(6):1032–1046. doi:10.3758/PP.70.6.1032
Messier J, Kalaska JF (1997) Differential effect of task conditions on errors of direction and extent of reaching movements. Exp Brain Res 115(3):469–478
Messier J, Kalaska JF (1999) Comparison of variability of initial kinematics and endpoints of reaching movements. Exp Brain Res 125(2):139–152
Mon-Williams M, Bingham GP (2011) Discovering affordances that determine the spatial structure of reach-to-grasp movements. Exp Brain Res 211(1):145–160. doi:10.1007/s00221-011-2659-2
Raghubir P, Krishna A (1999) Vital dimensions in volume perception: can the eye fool the stomach? J Mark Res 36(3):313–326. doi:10.2307/3152079
Schot WD, Brenner E, Smeets JBJ (2010) Robust movement segmentation by combining multiple sources of information. J Neurosci Methods 187(2):147–155. doi:10.1016/j.jneumeth.2010.01.004
Smeets JBJ, Brenner E (1999) A new view on grasping. Mot Control 3(3):237–271
Verheij R, Brenner E, Smeets JBJ (2012) Grasping kinematics from the perspective of the individual digits: a modelling study. PLoS ONE 7(3):e33150. doi:10.1371/journal.pone.0033150
Verheij R, Brenner E, Smeets JBJ (2013) Why are the digits’ paths curved vertically in human grasping movements? Exp Brain Res 224(1):59–68. doi:10.1007/s00221-012-3288-0
Wansink B, Van Ittersum K (2003) Bottoms up! The influence of elongation on pouring and consumption volume. J Consum Res 30(3):455–463. doi:10.1086/378621
Weir PL, Mackenzie CL, Marteniuk RG, Cargoe SL, Frazer MB (1991) The effects of object weight on the kinematics of prehension. J Mot Behav 23(3):192–204. doi:10.1080/00222895.1991.10118362
Wing AM, Turton A, Fraser C (1986) Grasp size and accuracy of approach in reaching. J Mot Behav 18(3):245–260. doi:10.1080/00222895.1986.10735380
Zaal FTJM, Bootsma RJ (1993) Accuracy demands in natural prehension. Hum Mov Sci 12(3):339–345. doi:10.1016/0167-9457(93)90023-I
Acknowledgments
This work was supported by a Grant from the Netherlands Organization for Scientific Research, NWO Vici grant 453-08-004.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Verheij, R., Brenner, E. & Smeets, J.B.J. The influence of target object shape on maximum grip aperture in human grasping movements. Exp Brain Res 232, 3569–3578 (2014). https://doi.org/10.1007/s00221-014-4046-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-014-4046-2