
Abstract
Across three different task conditions, the adaptability of reciprocal aiming movements was investigated. Task difficulty was manipulated by changing ID, with 9 IDs between 2.5 and 6.5 tested. Reciprocal aiming movements were performed with ID scaled (predictable) in a trial in a decreasing (high 6.5–low 2.5) or increasing manner (low 2.5–high 6.5) or with ID constant in a trial and changed randomly across trials. Movement time scaled linearly with ID in both the scaling ID and control ID presentations. A critical ID boundary (IDC) was identified, and the adaptation of aiming movements was a function of this critical boundary. For IDs < IDC, the results are interpreted as representing a predominance for pre-planned control based on a dwell time measure and a symmetry ratio measure (time spent accelerating–decelerating the limb). Within this ID range, movement harmonicity was changed to a greater extent when ID was scaled in a predictable direction as compared to being presented in a random manner. For IDs > IDC, the findings suggest a predominance for feedback control based on the dwell time and symmetry ratio measure. Within this ID range, the absolute time spent decelerating was increased, possibly to insure accuracy and minimize MT, with the predictable changes associated with an increase in ID needing less time devoted to feedback processing compared to the other ID presentations. The results are consistent with the theoretical position that aiming motions may be controlled by a limit cycle mechanism with ID < IDC, while aiming motions may be controlled by a fixed-point mechanism with ID > IDC. The results suggest that the ability of the motor system to adapt to both scaled and random changes in ID revolves around a modulation of pre-planned and feedback-based control processes.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Humans and animals move through a world of constantly changing conditions that require their motor systems to adapt limb and joint motion paths to achieve a goal or maintain coordination stability. In rhythmic movement tasks, adaptability to changing conditions has often been investigated by scaling movement frequency or movement amplitude (Kelso 1984; Carson et al. 1997; Byblow et al. 1999; Ryu and Buchanan 2004; Buchanan and Ryu 2012). The scaling of movement frequency or amplitude has often produced transitions from a less stable to more stable behavioral pattern, such as the transition from an anti-phase to in-phase bimanual coordination pattern (Kelso 1984; Haken et al. 1985). Discrete and reciprocal aiming tasks require the motor system to make precise contact with a target. The adaptation of aiming actions is often investigated by perturbing the position of a target to hit or modifying the target’s size and/or distance to move between targets (Fitts 1954; Elliott et al. 1995; Plamondon and Alimi 1997; Heath et al. 1998; Mottet and Bootsma 1999; Adam et al. 2000, 2006; Huys et al. 2010). The adaptation of reciprocal aiming movements has been examined with Fitts’ ID paradigm, with ID = 2A/W (A = movement amplitude, W = target width). A larger value of ID is interpreted as representing a more difficult aiming task. In a reciprocal Fitts’ task, participants move the end-effector between two targets for a short period of time and then stop. In the next trial, participants are presented with a new ID, and across the experiment, numerous IDs are often presented in a random order (Guiard 1997; Huys et al. 2010). The random presentation of IDs creates a context in which there is no continuity between adaptive changes for any given pair of IDs. In other words, the next condition can either be more or less difficult. Another way to present ID is to scale it across a series of increasing (more difficult) or decreasing (less difficult) IDs in a single trial. This will create a context for adaptive changes to span several ID values since the change in ID will be predictable. This study was designed to reveal whether adaptations in control processes that emerge in reciprocal aiming under a scaled ID context are distinct from adjustments that emerge when ID is changed in a random manner between short individual trials.
In Fitts’ original task, participants produced reciprocal aiming motions between pairs of targets with ID constant in a trial and ranging from 2 to 7 (Fitts 1954). One of the primary findings reported was that MT scaled linearly with ID. Across many studies that have used a random ID presentation format, MT often scales in a linear manner, while other kinematic measures are often characterized by nonlinear profiles when examined across a wide range of IDs. For example, peak velocity often occurs half-way between a pair of targets for IDs between 2 and 4 (Mottet and Bootsma 1999; Billon et al. 2000). For IDs > 4, peak velocity occurs prior to the midpoint between the targets, with more time being devoted to decelerating the limb for each increase in ID from 5 to 7 (Guiard 1993; Mottet and Bootsma 1999; Billon et al. 2000; Mottet et al. 2001; Bootsma et al. 2004). Van Mourik and Beek (2004) suggested that the shift in the location of peak velocity that demarcates movement acceleration/deceleration time as a proportion of total MT provides a measure of movement symmetry in cyclical reaching tasks. The basic idea is that cyclical reaching or reciprocal aiming motions that are purely sinusoidal should be characterized by approximately 50 % of MT spent accelerating the limb.Footnote 1 Some reciprocal aiming studies have shown that when limb motion departs from purely sinusoidal motion (becomes more nonlinear) that the proportional time spent accelerating decreases below 50 % as ID increases above four (Winstein and Pohl 1995; Winstein et al. 1997; Pohl and Winstein 1998, 1999; Buchanan et al. 2003, 2004; Bootsma et al. 2004; Boyle and Shea 2011). Research has shown that changes in time spent accelerating, both in absolute time units (Huys et al. 2010) and in proportional time (Buchanan et al. 2006), reflect a change in the underlying control structure. Within this paper, less absolute time spent accelerating compared to decelerating, even if both increase as MT increases for larger IDs, will indicate more of the total MT being devoted to feedback processing to insure accuracy.
Nonlinear changes as a function of ID also occur in movement dwell time which is the time it takes to reverse an aiming action over a target. Dwell time is derived from action termination and action initiation criteria based on movement displacement or movement velocity reaching an experimentally defined value (Winstein and Pohl 1995; Adam and Paas 1996; Pohl and Winstein 1998, 1999). For IDs < 4, dwell time is very short and reversals of the aiming action can average under 20 ms (Winstein and Pohl 1995; Pohl and Winstein 1998, 1999; Buchanan et al. 2003). Short dwell times are linked to peak acceleration occurring as the aiming action reverses over the target. For IDs > 4, dwell times becomes longer and velocity and acceleration are at or near zero for extended periods (Winstein and Pohl 1995; Winstein et al. 1997; Pohl and Winstein 1998, 1999; Buchanan et al. 2003, 2004, 2006; Kovacs et al. 2008; Boyle and Shea 2011; Boyle et al. 2012). Longer dwell times suggest a postural state associated with the reversal in limb motion. The idea of a postural state has been linked to determining whether or not repetitive limb motion is rhythmic or discrete in nature (Hogan and Sternad 2007).
Movement harmonicity (Guiard 1993, 1997) and movement continuity (Mottet et al. 2001; Bootsma et al. 2004; Lazzari et al. 2009) have also been presented as measures of the extent that a reciprocal aiming action approaches sinusoidal motion and both undergo significant nonlinear changes as a function of ID. Movement harmonicity and movement continuity are derived from the aiming limb’s acceleration profile. Movement harmonicity is defined as the ratio of minimum to maximum acceleration between a pair of movement reversals during reciprocal aiming (Guiard 1993). Movement continuity is defined as the ratio between acceleration at the reversal point and at peak acceleration for every motion between two targets and is based on Guiard’s harmonicity measure (Mottet and Bootsma 2001). Studies have shown that for IDs < 4, harmonicity and movement continuity values remain between .9 and 1 and then decrease significantly to values between .3 and 0 for IDs ≥ 5 (Guiard 1997; Mottet and Bootsma 2001; Bootsma et al. 2004). Guiard (1997) argued that a harmonicity (H) value of .5 represents the boundary between cyclical motion (H > .5) and discrete motion (H < .5). Fitting a logistic function to a series of H/ID data sets Guiard (1997) showed that H crossed the value of .5 on average for an ID value of 4.44, which was labeled as a critical ID (IDc) (Lazzari et al. 2009). The harmonicity measure was originally constructed to show that reciprocal aiming actions with certain kinematic characteristics should not be conceptualized as being composed of discrete segments concatenated together, a common viewpoint in the information processing domain (Meyer et al. 1988, 1990; Guiard 1993, 1997). Buchanan and colleagues in several studies argued that the cyclical and discrete regimes identified with the harmonicity measure can be conceptually linked to limit cycle and fixed-point attractors as outlined below (Buchanan et al. 2003, 2004, 2006).
Based on the nonlinear profiles identified in the kinematic-based measures of harmonicity, dwell time, and proportional time spent accelerating the limb, some investigators have argued that for IDs < 4, the motor system relies on pre-planned control to minimize movement time without trading off accuracy (Guiard 1997; Buchanan et al. 2003, 2004; Kovacs et al. 2008; Boyle and Shea 2011). The idea of pre-planned is not meant to imply that feedback is not available, just that the need for corrective adjustments is minimal. From this viewpoint, a pre-planned strategy might be that for a given range of aiming tolerance, the motor system sets the required movement amplitude such that peak velocity occurs at approximately 50 % of MT and maximum acceleration occurs with target reversal. From a dynamical systems perspective, aiming responses for IDs ≤ 4 have been linked to a limit cycle oscillator (or attractor) as the control mechanism at both the conceptual (Buchanan et al. 2003, 2004, 2006) and theoretical levels (Mottet and Bootsma 1999; Bootsma et al. 2004; Huys et al. 2010).Footnote 2 A limit cycle oscillator produces a closed trajectory in phase space (position, velocity) which is characterized by the motion trajectory always following the same path at a fixed frequency (Beek and Beek 1988; Beek et al. 1996). From a kinematic point of view, limb motion may be viewed as consistent with certain types of nonlinear oscillators when velocity peaks half-way between the reversal points (flexion and extension) of a limb’s rhythmic action with acceleration at a maximum at the reversal points (Kay et al. 1987), i.e., the closed path is a circle. It must be stated that deviations from a circle can occur and that limb motion can still be model as a limit cycle attractor (Beek et al. 1996; Mottet and Bootsma 1999).
For IDs > 4, it has been argued that the control of reciprocal aiming actions requires more online control processing. In this case, the idea of online control is linked to feedback (visual and proprioceptive) processing to insure accuracy (Winstein and Pohl 1995; Adam and Paas 1996; Guiard 1997; Bootsma et al. 2002; Buchanan et al. 2003, 2004; Fernandez et al. 2006; Kovacs et al. 2008). From a dynamical systems perspective, it has been proposed that the control mechanism for aiming responses for IDs > 4 can be conceptualized as a shift between two fixed-point attractors (Buchanan et al. 2003, 2006; Huys et al. 2010). A fixed-point attractor is a single point or equilibrium point in phase space (position, velocity) where the system’s trajectory converges (Schöner 1990). The system will remain on the fixed point for all time in the absence of an external perturbation. Based on the movement kinematics, the limb’s velocity and acceleration go to zero and motion ceases for an amount of time. Some researchers have argued that for IDs > 4, the aiming action can still be modeled as a limit cycle oscillator (Mottet and Bootsma 1999).
In a study by Buchanan et al. (2006), ID was scaled from 3.1 to 5.9 within a trial and the change in ID was accomplished by scaling W,Footnote 3 so that the change in ID was seamless and did not act as an instantaneous perturbation. In other words, W was changed by moving the outside edge of the targets, keeping the amplitude between the inside edges the same. The scaling of ID produced significant nonlinear changes in the proportional time spent accelerating the limb, dwell time, and harmonicity. The results were interpreted as revealing a transition between the predominance of specific control processes (planning, feedback) and dynamical structures (limit cycle, fixed-point) as a function of an IDC. This initial scaling study did not address the issue of whether or not the adaptive changes that occur under constant ID conditions are similar to or are different from adaptive changes that occur under scaled ID conditions.
Previous research has used abrupt changes in A and W to examine the adaptation of reciprocal aiming actions as a function of a change in ID (Fernandez et al. 2006). This research only required an adjustment to a single ID change in a trial, e.g., a change in ID from 4 to 5, and revealed that the motor system adapted to the change in ID on two different time scales. The first time scale was defined as a rapid adjustment phase that occurred during the deceleration portion of the first aiming action after the change in ID. The second time scale was defined as a gradual adjustment phase occurring over the next 2 reversal actions (1 cycle) on average. There are two findings from the Fernandez et al. study that are relevant to the current experiment. First, a perturbation that increased ID (A increasing or W decreasing) resulted in an increase in deceleration time in the rapid adjustment phase, with an increase in peak velocity in the rapid phase for a change in A, and a decrease in peak velocity in the gradual phase for a change in W (Experiments. 1 and 2). Second, a perturbation that resulted in ID decreasing (A decreasing or W increasing) produced no change in deceleration time in the rapid phase, and only a decrease in peak velocity in the gradual phase for the change in A (Experiments. 1 and 2). The above results show that the motor system adapts within two cycles to changes in ID with clear differences linked to whether ID is increased or decreased in a single step. The Fernandez et al. (2006) study was designed to identify adaptive processes across a single ID change within a trial and not across a series of ID changes. A series of ID changes in a given direction (increasing or decreasing) may lead to adaptive processes that span several ID values, and the current experiment was designed to explore this feature of adaptive change in rapid aiming.
Three theoretical issues underlie the design of the current experiment. The first issue revolves around Fitts’ Law which states that MT scales linearly with ID, lengthening as ID increases and shortening as ID decreases. The current experiment will reveal whether MT scales linearly and with a similar profile when ID is scaled in a predictable fashion versus changing from trial to trial in an unpredictable fashion as often done (Guiard 1997; Huys et al. 2010). The second issue revolves around the adaptation of pre-planned and feedback control processes. The work by Fernandez et al. (2006) examined adaptive behavior across a single change in ID and only for IDs ≥ 4. An adaptive change was observed in the time spent decelerating the limb (interpreted as a change in feedback processing time) with distinct differences when ID was increased or decreased by a single step (Fernandez et al. 2006). The current experiment will identify how the motor system adjusts pre-planning and feedback-based control over an extended series of ID values that span ID regions associated with different structural control mechanisms (limit cycle and fixed-point). The third issue is related to the rigidity of the critical ID boundary. Research that used Guiard’s harmonicity measure reported critical ID values ranging from 4.0 to 4.5 (Guiard 1997; Buchanan et al. 2006; Lazzari et al. 2009), and work using drift coefficients associated with dynamical structures has identified a critical ID value of 4.1 (effective ID of 5.4) (Huys et al. 2010). The current experiment will test whether the ID boundary is more dependent on the value of ID, the W and A values that define ID, or the context of ID presentation.
Method
Participants
Thirty adults (aged 20–26 years.) volunteered for this experiment. The study was approved by the Internal Review Board (IRB) for the ethical treatment of human participants in scientific research at Texas A&M University. All participants singed a consent form approved by the IRB and received class credit and were right-hand dominant as determined by a self-report. Participants were split into two groups: a scaling ID group and a control ID group.
Apparatus and procedures
The apparatus consisted of a horizontal lever (42 cm long) affixed at the proximal end to a near frictionless vertical axle, which was bolted to the bottom right corner of the table (Fig. 1a). The axle of the lever rotated freely in a ball-bearing support, and the lever moved in the horizontal plane over the table surface. A vertical handle was placed at the distal end of the lever. The position of the handle was adjustable so that each participant’s elbow was aligned over the lever’s axis of rotation when grasping the handle. The elbow was positioned away from the body and elevated to chest level. The handle was moved by flexing and extending the elbow. Horizontal movement of the lever was recorded with a potentiometer that was attached to the lower end of the axle. The potentiometer was sampled at 100 Hz. The two targets were displayed on the table surface by a projector mounted over the table. Elbow extension was used to hit the far (lateral) target, while elbow flexion was used to hit the target near the body midline.

The positioning of the subject relative to the handle and the targets on the table top is portrayed in a. Three target pairs from the Amp-L condition representing the IDs of 2.5, 4.5, and 6.5 are shown. The computation of the harmonicity measure H is portrayed in b–d. The dashed line represents the displacement time series, and the solid line is the acceleration time series. The gray shaded areas represent the target area (not to correct scale) where movement reversal occurs
Scaling ID protocol
Participants sat in a chair perpendicular to the table edge and rested their right arm on the manipulandum. Participants were first asked to oscillate the lever as to ensure full range of motion capability and then given instructions for the experimental trials. It was explained that four lines representing targets would be displayed and an auditory stimulus (500 ms beep) would cue the participant to initiate the reciprocal aiming action. Participants were instructed that the amplitude between the target centers and target width would change during the trial. Within a trial, A and W were manipulated simultaneously to scale ID through 9 values between 2.5 and 6.5 with a step size of .5. In a long amplitude condition (Amp-L), the amplitude change between target centers was 4°. In a small amplitude condition (Amp-S), the amplitude change was 2°. The As and Ws and resulting 9 ID values for each amplitude condition are reported in Table 1. The different-sized As and Ws were selected as a control to show that any effects found are a function of the value of ID and the presentation format (scaling or control) and not a specific pairing of As and Ws. Thus, it is predicted that the Amp-L and Amp-S manipulation will have minimal effect on the dependent variables of interest.
ID was increased and decreased across the 9 ID values in separate trials. In an increasing trial, ID was scaled from 2.5 to 6.5, and in a decreasing trial, ID was scaled from 6.5 to 2.5. The ID change was predictable in that it would always increase or decrease within a block of trials. In both scaling directions, the ID of 2.5 was presented for 4 s and the ID of 6.5 was presented for 12 s, with 1 s added (2.5, 3.0…) or subtracted (6.5, 6.0…) for each ID between the extremes. Total trial length was 72 s, and after each trial, participants were given a 2-min rest period. Participants performed a practice trial of the increasing and decreasing condition and then a total of 6 trials for each amplitude condition (3 increasing and 3 decreasing) for a total of 12 trials. Each ID was encountered 12 times by the scaling group. The increasing and decreasing ID trials were counterbalanced. Each participant performed the aiming task for 19 min and 12 s. A 3-min rest was given after every three trials. Overall, the scaling session lasted approximately 35 min. The participants were instructed to move as fast as possible and to be as accurate as possible. On average, there were 13.7 target hits per ID. The average number of hits per ID as a function of scaling condition is reported in Table 2. Aiming accuracy was defined as the ratio of the number of reversals that occurred within the target region to the total number of reversals per ID presentation. Every trial had over a 90 % accuracy rate when averaged across all ID values with an overall accuracy rate of 96.4 % in the decreasing condition and 95.4 % in the increasing condition. The average accuracy rate per ID is reported in Table 2.
Control ID protocol
Participants in the control ID trials performed reciprocal aiming for the same 9 IDs in both amplitude conditions. Each participant performed 4 practice trials, two trials with an ID of 3.5 and two trials with an ID of 5.5 with one trial from each amplitude condition. In the control trials, each ID in both amplitude conditions (total 18 A/W pairs) was presented a total of three times. Overall, the control group performed a total of 54 experimental trials with 6 trials for each ID. Since the control group did not perform in the scaling conditions, they performed half as many trials for each ID. All 9 IDs were presented in a random fashion without any combination of A and W producing the same ID occurring sequentially. Trial duration was dependent upon ID. The aiming action for each control ID was performed for the same number of seconds as the equivalent ID used in the scaling conditions. Each participant performed the aiming action for 7 min and 20 s, and a 2-min break was given after every 18 trials. Overall, this experimental session lasted approximately 20 min. The participants were instructed to move as fast as possible and to be as accurate as possible. The average number of target hits across all IDs was 15.2. The overall accuracy rate was 95.5 % across all IDs. The average target hit per ID and the average accuracy rate per ID are reported in Table 2.
Data analysis
The potentiometer signal was filtered with a second-order dual-pass Butterworth filter with a cutoff frequency of 10 Hz. All dependent measures were computed on a half-cycle basis (between every two target strikes) for each ID. Since target A and W changed abruptly within the scaling trials, the first full cycle of movement for each ID was dropped in both the control and scaling data. Total movement time (MT), dwell time (DT), and time spent accelerating and decelerating the limb were computed based on movement onsets and offsets associated with movement reversals. Movement onset was determined with reference to peak velocity. From the point of peak velocity between a pair of targets, a search backwards was performed to find the first sampled point with a velocity value ≤5 % of peak velocity. If the identified 5 % value was associated with a just performed movement reversal, then it was taken to represent movement onset for that half-cycle. Movement offset was located by searching forward from the point of peak velocity to find the first point that was ≤5 % of peak velocity. If the identified 5 % value was followed by a movement reversal, then it was taken to represent movement offset. From the onset and offset times, movement time was defined as, MT = movement offset i –movement onset i . A linear regression analysis was performed on the MT/ID means from every scaling trial across all participants as a function of scaling direction and movement amplitude condition. Dwell time associated with a movement reversal was defined as, DT = movement onset i+1–movement offset i . The acceleration time (AccT) of the limb was taken as the time from movement onset until peak velocity within every half-cycle of motion. The deceleration time (DecT) of the limb was taken as the time from peak velocity to movement offset. The symmetry ratio (SR) measure as initially defined was a proportional time measure comparing AccT to MT, SR = AccT/MT (Van Mourik and Beek 2004). For the current experiment, the SR measure was computed as the difference between AccT and DecT, SR = AccT–DecT. Values of SR = 0 indicate symmetry in acceleration time and deceleration time. Values of SR < 0 indicate more absolute time decelerating, and values of SR > 0 indicated more absolute time accelerating the limb.
An index of movement harmonicity (H) was computed based on inflection points in the acceleration time series (Guiard 1993, 1997). Both velocity and acceleration were filtered at 10 Hz. The displacement and acceleration time series were mean centered and normalized for each cycle and plotted around zero in the same window to facilitate the identification of minimum and maximum points in the acceleration trace around a movement reversal (see Fig. 1b–d). When a single peak occurred in the acceleration trace around a reversal, the value of H was set to 1 (Fig. 1b). When an inflection occurred in the acceleration trace around a reversal, movement harmonicity was computed as the ratio of minimum to maximum acceleration (Fig. 1c). If the acceleration trace crossed from positive to negative (or vice versa) around the reversal, the value of H was automatically set to 0 (Fig. 1d). A mean H value was computed from the individual values of H for the reversals associated with a given ID.
Previous work has shown that H varies with ID in a manner consistent with a logistic function where H = 1/(1 + exp(−b−(a*ID)), with a and b as parameters and the ratio of –b/a providing an estimate of the critical IDC value when H = .5 (Guiard 1997; Lazzari et al. 2009). The above logistic function was fit to the H/ID means from every scaling trial as a function of scaling direction and amplitude condition to determine IDC values.
Statistics
An analysis of the scaling ID trials will be presented first. For the scaling conditions, the dependent variables (MT, DT, H, and SR) were analyzed with 2 Amplitude (Amp-L and Amp-S) × 2 Scaling (Increasing ID and Decreasing ID) × 9 ID repeated measures ANOVAs. All effects significant at the .05 level are reported, and partial eta squared (n 2 p ) is provided as an estimate of individual effect sizes. Tukey’s (HSD) test was used to test the significance level for any required post hoc tests (α = .05).
Results: scaling ID within a trial
Movement time (MT) and dwell time (DT)
The ANOVA of the MT data revealed significant main effects of ID (F(8,112) = 245.51, p < .0001, n 2 p = .94) and Scaling direction (F(1,14) = 7.17, p < .05, n 2 p = .33). The Scaling × ID interaction (F(8,112) = 13.79, p < .0001, n 2 p = .49) and the Amplitude × ID interaction (F(8,112) = 3.56, p < .001, n 2 p = .17) were significant. Post hoc tests of the Scaling × ID interaction revealed that MT became significantly longer with each change in ID from 3 to 6.5 in the increasing condition and became significantly shorter with each change in ID from 6 to 2.5 in the decreasing condition (Fig. 2a). MTs between scaling conditions were significantly different for IDs 2.5 and 4.5–6. In both amplitude conditions, post hoc tests found that MT was different for every ID, with significant differences between amplitude conditions for IDs 2.5 and 5–6 (Fig. 2b).

Movement time is plotted as a function of ID and scaling direction (a) and ID and amplitude condition (b), and dwell time is plotted by scaling direction and ID (c). The dashed and solid lines are the estimated lines from the regression analysis: dashed lines—increasing condition (a) and Amp-L condition (b), solid lines—decreasing condition (a) and Amp-S condition (b). The dashed line in the dwell time plot is at 25 ms. The asterisks represent significant differences between conditions as a function of ID, and the error bars represent the standard error of the mean
The linear regression analysis was significant for the increasing (MT = −41.8 + 112.9(ID), r 2 = .73, F(1,268) = 712.3, p < .0001) and decreasing (MT = −99.7 + 129.5(ID), r 2 = .81, F(1,268) = 1,155.5, p < .0001) scaling conditions (Fig. 2a). The regression was significant for the Amp-L (MT = −72.7 + 120.9(ID), r 2 = .77, F(1,268) = 905.1, p < .0001) and Amp-S (MT = −68.8 + 121.5(ID), r 2 = .76, F(1,268) = 867.2, p < .0001) constructions of ID (Fig. 2b).
The analysis of the DT data found significant main effects of Scaling (F(1,14) = 5.34, p < .05, n 2 p = .27) and ID (F(8,112) = 70.4, p < .0001, n 2 p = .83). The Scaling × ID interaction was significant (F(8,112) = 3.89, p < .001 n 2 p = .21). Post hoc tests (p < .05) revealed that DT was different between the scaling conditions for IDs 5.5–6.5 (Fig. 2c). In the increasing condition, DT was constant across IDs 2.5–4 and increased for each ID from 4.5 to 6.5. The decreasing ID condition was characterized by a significant drop in DT across IDs 6.5–5, with ID 5 having a larger DT than IDs 4–2.5, and ID 4.5 having a larger DT than IDs 3.5–2.5.
Harmonicity (H) and symmetry ratio (SR)
The analysis of the H values revealed a main effect of ID (F(8,112) = 290.1, p < .0001, n 2 p = .92). The Scaling × ID (F(8,112) = 13.31, p < .0001, n 2 p = .46) and Amplitude × ID (F(8,112) = 6.82, p < .0001, n 2 p = .35) interactions were significant. Post hoc tests of the Scaling × ID interaction revealed that H was larger in the decreasing condition compared to the increasing condition for IDs 2.5 and 3 (Fig. 3a). For both scaling directions, H changed significantly for each change in ID from 3 to 5.5 and was different between IDs 5.5 and 6.5. In the decreasing condition, H increased significantly from ID 3–2.5. For the Amplitude × ID interaction, post hoc tests revealed that H was larger in the Amp-S condition compared to the Amp-L condition for IDs 2.5–4 (Fig. 3b). In the two amplitude conditions, H changed significantly for each change in ID from 3 to 5.5, and between IDs 5.5 and 6.5.

Mean harmonicity is plotted as function of scaling direction and ID (a) and amplitude and ID (b), and the symmetry ratio data are plotted as a function of scaling direction and ID (c). The error bars represent the standard error of the mean. The asterisks represent a significant difference between conditions for a given ID. The vertical lines identify the IDC values based on fitting a logistic equation to the data (see text) as a function of scaling direction (a, dashed line decreasing ID) and amplitude condition (b, dashed line Amp-L)
The fit of the logistic function returned significant results for the increasing (F(1,268) = 844.4, p < .0001, r 2 = .70) and decreasing conditions (F(1,268) = 1,874.7, p < .0001, r 2 = .87), and for the Amp-L (F(1,268) = 916.2, p < .0001, r 2 = .77) and Amp-S ID constructions (F(1,268) = 1,690.3, p < .0001, r 2 = .86). The vertical lines in Fig. 3a, b represent the ID value where H = .5 based on the fit of the logistic function: increasing IDC = 4.1, decreasing IDC = 4.0; Amp-L IDC = 3.9; and Amp-S IDC = 4.1.
Reported in Table 3 are the values of AccT and DecT as a function of scaling direction. The means show that the changes in the MT data were composed of changes in both AccT and DecT. For IDs ≤ 4 in the scaling conditions, there was less than a 10-ms difference between acceleration and deceleration absolute times. For IDs between 4.5 and 6.5, the change in MT was composed of changes in both AccT and DecT with the change larger in DecT.
The analysis of the SR data revealed main effects of Scaling direction (F(1,14) = 7.9, p < .05, n 2 p = .36) and ID (F(8,112) = 34.5, p < .0001, n 2 p = .71). The Scaling × ID interaction effect was significant (F(8,112) = 5.12, p < .0001, n 2 p = .27). With ID increasing in a trial, SR was near zero and did not change significantly across IDs 2.5–4, and then became significantly more negative for each ID from 4.5 to 6.5 (Fig. 3c). As ID decreased in a trial, the value of SR became significantly less negative for every change in ID from 6.5 to 4.5, and then remained near zero and did not change significantly across IDs 4–2.5 (Fig. 3c). The SR value was significantly more negative in the decreasing condition for IDs 4.5–6.5.
Discussion
In our previous scaling experiment, it was argued that the scaling of ID was associated with a change from pre-planned control predominating with task ID < IDC, and for feedback control processes predominating with task ID > IDC. The IDC was identified as 4.2. The above conclusion was based on changes in acceleration time, dwell time, and harmonicity. The IDC for the current scaling conditions on average was 4. The SR, DT, and H data from this experiment support the same conclusion regarding pre-planned and feedback-based control. However, differences did emerge between the experiments. In the previous study, the value of SR underwent large changes for IDs < 4.5, e.g., SR = +55 ms with ID = 3.07, SR = +4 ms with ID = 3.54, and SR = −49 ms with ID = 4.04. In this study, SR averaged less than 10 ms for IDs < 4.5. For IDs > 4.0, the two experiments produced similar patterns with SR becoming more negative (more absolute time spent decelerating the limb) for each increase in ID. Taken together, the results show extensive flexibility in the motor system’s ability to adjust the amount of time spent accelerating and decelerating an aiming action when ID changes in a predictable manner in different environmental contexts. The overall profile of DT in the previous experiment was consistent with this study, with dwell time constant for IDs ≤ 4.04 (MN = 29 ms) and changing significantly for each ID > 4.04 with the pattern (and actual times) consistent with those shown in Fig. 2c. If dwell time is taken as an experimentally defined measure of a postural state, both experiments reveal a change in postural state around a similar IDC. This finding may be interpreted as evidence that the IDC represents a boundary with actions cyclical for ID < IDC and actions becoming more discrete for ID > IDC.
In the previous experiment, H on average (H = .86) was larger for IDs ≤ 4 compared to this experiment (H = .7). The SR pattern of the previous experiment reveals more time spent accelerating. The above finding indicates that the change in H and SR may be linked to the nature of the predictability associated with the continual change in ID. In the current experiment, the targets jumped, and in the previous experiments, the targets remained at the same location, with only the outside edge moving. With only the outside edge moving, the change in ID may not have perturbed the motor system to the same extent, thereby allowing H to remain large and for more of the trajectory path to be under pre-planned control. For IDs > 4, the pattern of change in H was the same as that seen in Fig. 2b. This indicates that when feedback predominates, limb motion is not harmonic, and that the values of ID encountered are more constraining than the nature of how ID is scaled.
Next, analyses will be performed to determine whether the adaptations identified under the current scaling conditions are distinct from the adaptations that occur under control conditions when the change in ID is not predictable.
Results: fixed ID versus scaled ID
ANOVAs of the control group ID data as a function of Amp-S and Amp-L did not reveal any significant differences in the H, SR, MT, or DT data sets. In the scaling group data, the amplitude conditions also had minimal impact on performance. For the above two reasons, we collapse across the amplitude conditions to simplify the next set of analyses. The performance of the control (Cnt) ID group was compared to the scaling ID group in separate ANOVAs for the increasing (Inc) and decreasing (Dec) scaling directions. In the following ANOVAs, scaling is a between-group factor (Inc vs Con, Dec vs Con) and ID is a within-group factor.
Movement time (MT) and dwell time (DT)
The analysis comparing the increasing condition to the control group revealed a significant effect of ID (F(8,224) = 443.53, p < .0001, n 2 p = .94) and a significant Scaling × ID interaction (F(8,224) = 7.33, p < .0001, n 2 p = .21). Post hoc tests of the interaction (p < .05) found that the control group had shorter MTs for IDs 2.5, 3, and 3.5, compared to the increasing condition (Fig. 4a). The analysis comparing the decreasing condition to the control group revealed significant main effects of ID (F(8,224) = 529.3, p < .0001, n 2 p = .95) and Scaling (F(1,14) = 7.23, p < .0001, n 2 p = .34), and a significant Scaling × ID interaction (F(8,24) = 2.34, p < .05, n 2 p = .07). Post hoc tests of the interaction (p < .05) found shorter MTs for IDs 2.5–6 in the control group compared to the decreasing condition (Fig. 4a). The regression of the MT data for the control ID group revealed a strong and significant linear relationship (MT = −205.5 + 143.9 (ID), r 2 = .89, F(1,268) = 2,201, p < .0001).

The data from the control ID group (Cnt) and scaling ID group (Inc, Dec) are plotted as a function of ID in all four plots: a movement time, b dwell time, c Harmonicity, and d symmetry ratio. The solid line in a represents the regression line for the control ID group. In c, the control group critical ID value is represented by the dashed vertical line. The error bars represent the standard error of the mean
In the analyses of the DT data, only significant effects of ID were found in the comparison of the increasing (F(8,224) = 118.7, p < .0001, n 2 p = .80) and decreasing conditions (F(8,224) = 120.8, p < .0001, n 2 p = .81) to the control group. Post hoc tests revealed that DT was significantly different across every ID in the range of 4.5–6.5 while not changing significantly for IDs between 2.5 and 4 (Fig. 4b).
Harmonicity (H) and symmetry ratio (SR)
The analysis comparing the H values from the increasing condition to the control group revealed main effects of Scaling (F(1,8) = 16.1, p < .01, n 2 p = .53) and ID (F(8, 224) = 411.4, p < .0001, n 2 p = .93). The Scaling × ID interaction was significant (F(8,224) = 10.75, p < .0001, n 2 p = .27). The analysis of the decreasing condition versus the control group also found main effects of Scaling (F(1,8) = 14.8, p < .01, n 2 p = .51) and ID (F(8, 224) = 517.8, p < .0001, n 2 p = .94), and a significant Scaling × ID interaction (F(8,224) = 7.74, p < .0001, n 2 p = .21). The post hoc tests (p < .05) of the interactions from both analyses found that H for the control group was larger than the decreasing and increasing conditions for IDs 2.5–5 (Fig. 4c). Within the control group, H did not change significantly across IDs 2.5–3.5 and 5.5–6.5 while changing for each ID from 3.5 to 5.5. The fit of the logistic function to the H values from the control group was significant (F(1,268) = 2,075.7, p < .0001, r 2 = .88). The IDC for the control group was identified as 4.6.
The analyses of the SR data did not reveal a main effect of Scaling (Fs < 3.76, ps > .07). The main effect of ID was significant in the comparison of the increasing (F(8,224) = 82.1, p < .0001, n 2 p = .74) and decreasing (F(8,224) = 113.0, p < .0001, n 2 p = .8) conditions to the control group. The Scaling × ID interaction was only significant in the comparison of the increasing condition to the control group (F(8,224) = 4.89, p < .0001, n 2 p = .15). For the control group, the value of SR was positive and near 0 for IDs 2.5–3.5, and then decreased to negative values for IDs 4–6.5. The SR values for the control group were significantly different between IDs 3.5, 4.5, 5.5, and 6.5 and between IDs 4, 5, and 6 (Fig. 4d). The SR values were significantly more negative (p < .05) in the control group compared to the increasing ID condition for IDs 5–6.5.
General discussion
The experiment presented was designed with the primary goal of identifying how the motor system adapts reciprocal aiming movements to changing environmental conditions. MT scaled in a linear manner when ID was scaled over a large range in a predictable manner, with a small but significant variation between the increasing and decreasing conditions. MT also scaled in a linear manner in the control condition when ID was changed between trials and in a random manner, and the pattern was slightly different from the scaling conditions. Two different sets of ID based on different combinations of A and W were examined, but the different systematic changes in amplitude had little impact on performance, suggesting that the actual value of ID is a more constraining factor than the specific A and W pairings. Overall, this study suggests that the motor system adapted reciprocal aiming actions differently when the change in ID was scaled in a predictable manner withing a long trial compared to being changed in a random manner between short trials. The findings will be discussed within the context of pre-planned and online feedback control of aiming actions, and within the context of dynamical systems theory with regard to limit cycle and fixed-point attractors as distinct control mechanisms (Huys et al. 2010).
Context-dependent adaptations in reciprocal aiming actions for ID ≤ 4
The significant differences found in the kinematic measures revealed that the motor system adapted the aiming response based on an interaction between ID and ID context. The control ID context allowed for the shortest MTs, and the increasing ID context produced the longest MTs for this range of IDs. Even with significant differences in MT, the SR measure showed that for IDs ≤ 4, the motor system produced reciprocal aiming consistent with a definition of cyclical or sinusoidal motion with nearly equal amounts of time spent accelerating and decelerating the limb (see Table 3) (Van Mourik and Beek 2004). Thus, the predictable change in ID after the first cycle of motion seems to have been primarily adapted to through the use of pre-planned control which would afford the shortest MTs. In the control condition with the change in ID not predictable, the results indicated that MT was minimized through the same type of pre-planned control process, and without the perturbation MT on average was shorter. The work of Fernandez et al. (2006) demonstrated that significant adjustments were made in the absolute time decelerating the limb when ID increased from 4 to 5, 5 to 6, or 4 to 6. The authors concluded that the increase in deceleration time demonstrated the importance of visual feedback to help insure accuracy. The lack of a change in deceleration time for IDs ≤ 4 suggests that accuracy can be achieved without having to rely on more time decelerating the limb, a time segment often associated with feedback processing.
Harmonicity values for IDs < 4 were consistent with those that previous research has also associated with cyclical or sinusoidal actions (Guiard 1993, 1997; Mottet et al. 2001; Buchanan et al. 2003, 2004; Kovacs et al. 2008; Lazzari et al. 2009; Levy-Tzedek et al. 2010). The control ID condition produced the largest values of H for all IDs < 4, and this finding is consistent with the shorter MTs for the control condition in this range. The smaller values of H in the ID scaling conditions reveal that the adaptation of the aiming response is longer than just the initial couple of cycles as revealed by Fernandez et al. (2006). In the current analysis, the first cycle was dropped and this did not have an impact on acceleration–deceleration time for this range of IDs. The differences found in H reveal an adaptation of limb motion by altering the nature of the acceleration–deceleration process of the limb around peak velocity. One possible interpretation is that the modification in the acceleration profile revealed by the value of H allowed for the symmetric relationship in the absolute time spent accelerating–decelerating to be maintained as ID changed several times in quick succession. Fernandez et al. (2006) found that deceleration time increased when ID increased one step and did not change or decreased when ID decreased one step. It must be noted that the absolute time spent decelerating in the Fernandez et al. (2006) study was longer than the time spent accelerating. In this study, the acceleration–deceleration times were symmetric for IDs ≤ 4. Thus, the change in H reflects a dependence on initial conditions for this range of IDs that is not captured by the absolute time spent accelerating and decelerating the limb’s motion. The differences in MT and H when combined with the similarity in SR and DT indicate that the context of ID change is influencing performance in this experiment more than the actual value of ID for ID ≤ 4.
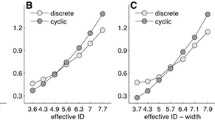
Work by Huys et al. (2010) recently examined rapid aiming for IDs from 2.5 to 6.9 (steps of .4) with ID changed between trials in a manner consistent with the control ID context in this experiment. The authors report that for IDs less than an effective ID of 5.41 (actual ID range of 2.5 to ≈ 4.1) that the aiming motion was consistent with a limit cycle control mechanism (Huys et al. 2010). This conclusion was based on fitting a sigmoid function to drift coefficient measures stated to characterize the relationship between neighboring vectors in the phase flow spanned by position and velocity. The inflection point in the sigmoid function was taken as the point demarcating the boundary between different dynamic control mechanisms. The current experiment revealed an IDC = 4 in the scaling conditions and an IDC = 4.6 in the control conditions. The analyses of the SR, H, and DT data support the conclusion that aiming performance observed in this experiment is consistent with the interpretation of a limit cycle control mechanism as defined by Huys et al. (2010) with ID < IDC. Buchanan and colleagues have extended the above interpretation in previous work by stating that the dynamics of the limit cycle mechanism are consistent with the predominance of pre-planned control (Buchanan et al. 2003, 2006). That is, a control mechanism that adjusts movement amplitude very rapidly to the change in ID and then due to the relaxed accuracy constraints for ID ≤ 4 requires feedback only in a monitoring role and not in an adjustment role to insure accuracy (Bootsma et al. 2002; Buchanan et al. 2003, 2004, 2006; Fernandez et al. 2006).
Context-dependent adaptations in reciprocal aiming actions for ID > 4
In the previous scaling work by Buchanan and colleagues, it was concluded that IDs > IDC place the system in a region of parameter space wherein the aiming actions are discrete in nature (Buchanan et al. 2006). The drift coefficient analysis of Huys et al. (2010) in combination with the sigmoid fit revealed that the occurrence of neighboring vectors being in opposition as the aiming action reversed over the target increased for IDs > the effective ID of 5.41 (actual ID ≈ 4.1). This is taken to indicate the existence of a pair of fixed-point attractors located over the targets. According to Huys et al. (2010), the motor system controls the aiming action of the arm by shifting the end point between the pair of fixed-point attractors. The ID value identified by Huys et al. (2010) is consistent with the IDC values identified in the current experiment.
In this experiment, the dwell time measure and SR measure also undergo significant statistical changes across the IDs of 4 and 4.5 in all three task contexts. The dwell time and SR ratios are both based on the velocity profile and the drift coefficient of Huys et al. (2010) is also based on the velocity profile. The dwell time measure remains constant for ID ≤ 4 and then increases significantly starting with ID 4.5 through 6.5. The increase in dwell time indicates that the system is taking a longer time to reverse the action of the limb, indicating that a greater amount of absolute time is spent with velocity <5 % of the peak velocity. Although the dwell time is not an exact measure of the behavior of neighboring velocity vectors, it does indicate velocity is changing little (if at all) for a period of time based on an experimental criterion. Theoretical work attempting to define limb motion as cyclical or discrete has argued that postures (stationary states in action) in experimental data can be defined based on setting criteria that monitor changes in velocity and acceleration profiles (Hogan and Sternad 2007). The nature of the statistical change in the dwell time measure is suggestive of postural states emerging over the target areas for IDs > 4.5. The existence of postural states is consistent with the definition of a fixed-point attractor. It is worth noting that no significant differences in dwell time were found between the control condition and the two scaling conditions for this range of ID. This indicates that the actual reversal of the action was very similar across the three ID contexts.
The SR measure also undergoes significant changes between the IDs of 4 and 4.5. In all three ID contexts, more absolute time of the total MT occurs in the deceleration phase of the aiming action. As pointed out by Fernandez et al. (2006), an increase in time spent decelerating is evidence indicating the importance of visual feedback monitoring to insure accuracy. Whereas all three ID contexts had a very similar SR profile for IDs ≤ 4, the SR profiles were different between the increasing and decreasing ID conditions for IDs ≥ 4.5. Taken together, the SR values and the absolute times reported in Table 3 indicate more time in the deceleration phase for the decreasing ID condition compared to the increasing condition. The decrease in movement amplitude compared to the increase in amplitude may account for the difference between the scaling conditions. Even though more absolute time is devoted to the deceleration phase to facilitate accuracy as ID increases, it is first necessary to get the limb in the vicinity of the target, a component of the action that may be linked to pre-planning. In other words, to trade-off MT for accuracy a change in planning must occur to account for the larger distance to be traveled, e.g., a stronger impulse selected on the next aimed motion. In the decreasing condition, a shorter distance is encountered with each change in ID. Thus, the previous pre-planned amplitude, even with the change in target size, would overshoot the target. The trade-off in MT and accuracy requires a change in pre-planning (e.g., smaller impulse) and an increase in feedback processing to adjust the amplitude while shortening MT. The control ID condition is similar to the decreasing ID condition for this range. This suggests that without the predictability associated with the increasing amplitude condition that a conservative approach, in the form of decreasing the absolute time spent decelerating the limb, emerges to insure accuracy (Table 3).
Adapting as a function of the IDC boundary
The above changes for IDs ≥ 4.5 are consistent with the differences that occur between conditions for IDs < 4. In the decreasing condition, the system moves from a fixed point to limit cycle regime and the need for possible corrective actions through feedback monitoring decreases. With less need for corrective actions with each change in ID, MT shortens more and H increases more compared to the increasing ID condition of the same IDs. In the increasing condition, the system moves from a limit cycle regime to a fixed-point regime and the need for possible corrective actions increases. The longer MTs and lower H values associated with the increasing condition for IDs between 2.5 and 3.5 suggest that the motor system is adjusting for the shift into the fixed-point control regime.
Work examining saccadic eye motion found that for IDs ≥ 4.25, one saccade was produced for one aiming action (Lazzari et al. 2009), indicating the importance of visual feedback to insure accuracy. For IDs < 4.25, saccades could occur at a greater rate than aiming movements, suggesting intermittent monitoring of hand motion linked more to the basic reciprocal motion of the limb than to monitoring each target strike (Lazzari et al. 2009). Blocking vision of the hand’s motion with the target visible or blocking vision of the target while allowing vision of the hand leads to error rates between 30 and 60 % for IDs between 4 and 6 (Wu et al. 2010), but has no impact on error rate for IDs ≤ 3. The above two studies demonstrate a significant change in the use of visual feedback for insuring movement accuracy with ID ≈ 4. The changes reported in the SR data and dwell time data from the current experiment are consistent with the above findings regarding visual feedback processing.
Can the importance of visual feedback be integrated conceptually with the theoretical control mechanisms of limit cycle and fixed-point dynamics? Huys et al. (2010) reported in an online data supplement that the fixed-point control mechanism was identified only when targets were present. In the task reported, participants were paced by a metronome set at the MTs observed for the IDs used in the initial study. The phase flow analysis revealed only limit cycle dynamics under the paced conditions, and Huys et al. (2010) concluded that high precision can only be achieved by the discrete mechanism. The interpretation offered here is that the high precision associated with the fixed-point dynamics as a control mechanism relies on a continual trade-off between pre-planning (initial impulse control) and visual feedback processing. When high precision is not required (IDs < 4), the interpretation is that the motor system pre-plans the aiming action as a limit cycle oscillator of set amplitude and high frequency (short MTs) that is characterized by a rapid and smooth turn-around. The data suggest that the transition between control mechanisms is accomplished through a shift in the predominance of pre-planned and feedback control such that high precision is achieved and MTs are as short as possible based on task difficulty (Buchanan et al. 2003, 2004, 2006; Fernandez et al. 2006). The above interpretation does not mean that fixed-point dynamics could not be associated with IDs < IDC and that limit cycle dynamics could not be associated with IDs > IDC. However, it may be that the use of a specific control mechanism outside a given range would have a significant impact on performance. For example, use of the fixed-point control mechanism for IDs < IDC may produce high accuracy but longer MTs. The efficiency of the different control mechanisms as a function of task difficulty and visual feedback processing needs to be examined in more depth in future work. One way to explore the above interaction would be to synchronize or anchor the target strike with a secondary stimulus. Work has shown that anchoring limb motion to a metronome (auditory or visual) can stabilize both the local and global coordination processes (Byblow et al. 1994, 1995; Fink et al. 2000; Maslovat et al. 2006). Within a reciprocal Fitts’ task, anchoring target strike with a metronome may force the motor system to alter the way pre-planning and feedback processes are integrated, especially if the pacing frequency is not in accordance with the range of MTs typically associated with a given ID.
Conclusions
Previous research identified a critical ID boundary (IDC) that forces the motor system to alter the organization of the control processes that underlie reciprocal aiming. Based on the movement acceleration profiles (harmonicity), this boundary falls within the following ID range, 4.0 < IDC < 4.5 (Guiard 1997; Bootsma et al. 2004; Buchanan et al. 2006; Lazzari et al. 2009), and based on an analysis of neighboring vectors in the phase flow, the boundary has been identified with an ID ≈ 4.1 (effective ID = 5.41) (Huys et al. 2010). The current results are in agreement with previous findings regarding the IDC. Flexibility linked to the predictable and the unpredictable changes in ID were linked to pre-planning for IDs < IDC, and linked to feedback processing for IDs > IDC. Overall, the results indicate the existence of two unique control mechanisms for reciprocal aiming, a cyclical mechanism characterized by limit cycle dynamics with pre-planned control predominating, and a discrete mechanism characterized by fixed-point dynamics with feedback control predominating. The control ID condition demonstrated that the limit cycle and fixed-point control mechanisms emerge for very specific initial conditions, consistent with the findings from Huys et al. (2010). The scaling ID conditions demonstrated for the second time a transition from a limit cycle to fixed-point control mechanism and vice versa in rapid aiming actions (Buchanan et al. 2006).
Notes
The vector field reconstruction performed by Huys et al. (2010) examined the position x(t) and velocity y(t) time series of the aiming action in the phase plane. The reconstruction was based on the first two drift coefficients that represent the velocity vector’s x and y components. For each velocity vector in the entire vector field, an angle θ was computed between every velocity vector and its neighboring velocity vectors. A fixed point exists when θ is approximately 180°. The analysis revealed that θ approached 180° when the aiming action reversed over the target for IDs > an effective ID = 5.41. This finding was interpreted as the system coming to rest on a fixed-point attractor over the target. For IDs < an effective ID = 5.41, the value of θ was small (<45°) as the aiming action reversed over the target. This finding was interpreted as the system exhibiting limit cycle dynamics.
References
Adam JJ, Paas FGWC (1996) Dwell time in reciprocal aiming tasks. Hum Move Sci 15:1–24
Adam JJ, Nieuwenstein JH, Huys R, Paas FGWC, Kingma H, Willems P, Werry M (2000) Control of rapid aimed hand movements: the one-target advantage. J Exp Psychol Hum Percept Perform 26:295–312
Adam JJ, Mol R, Pratt J, Fischer MH (2006) Moving further but faster: an exception to Fitts’s law. Psychol Sci 17:794–798
Balasubramaniam R, Wing AM, Daffertshofer A (2004) Keeping with the beat: movement trajectories contribute to movement timing. Exp Brain Res 159:129–134
Beek PJ, Beek WJ (1988) Tools for constructing dynamical models of rhythmic movement. Hum Mov Sci 7:301–342
Beek PJ, Rikkert WEI, vanWieringen PCW (1996) Limit cycle properties of rhythmic forearm movements. J Exp Psychol Hum Learn Mem 22:1077–1093
Billon M, Bootsma RJ, Mottet D (2000) The dynamics of human isometric pointing movements under varying accuracy requirements. Neurosci Lett 286:49–52
Bootsma RJ, Boulard M, Fernandez L, Mottet D (2002) Informational constraints in human precision aiming. Neurosci Lett 333:141–145
Bootsma RJ, Fernandez L, Mottet D (2004) Behind Fitts’ law: kinematic patterns in goal-directed movements. Int J Hum Comput Stud 61:811–821
Boyle JB, Shea CH (2011) Wrist and arm movements of varying difficulties. Acta Psychol 137:382–396. doi:10.1016/j.actpsy.2011.04.008
Boyle J, Panzer S, Wright D, Shea CH (2012) Extended practice of reciprocal wrist and arm movements of varying difficulties. Acta Psychol 140:142–153. doi:10.1016/j.actpsy.2012.03.006
Buchanan JJ, Ryu YU (2012) Scaling movement amplitude: adaptation of timing and amplitude control in a bimanual task. J Mot Behav 44:135–147. doi:10.1080/00222895.2012.656158
Buchanan JJ, Park JH, Ryu YU, Shea CH (2003) Discrete and cyclical units of action in a mixed target pair aiming task. Exp Brain Res 150:473–489
Buchanan JJ, Park JH, Shea CH (2004) Systematic scaling of target width: dynamics, planning, and feedback. Neurosci Lett 367:317–322
Buchanan JJ, Park JH, Shea CH (2006) Target width scaling in a repetitive aiming task: switching between cyclical and discrete units of action. Exp Brain Res 175:710–725
Byblow WD, Carson RG, Goodman D (1994) Expressions of asymmetries and anchoring in bimanual coordination. Hum Mov Sci 13:3–28
Byblow WD, Chua R, Goodman D (1995) Asymmetries in coupling dynamics of perception and action. J Mot Behav 27:123–137
Byblow WD, Summers JJ, Semjen A, Wuyts IJ, Carson RG (1999) Spontaneous and intentional pattern switching in a multisegmental bimanual coordination task. Mot Cont 3:372–393
Carson RG, Thomas J, Summers JJ, Walters MR, Semjen A (1997) The dynamics of bimanual circle drawing. Q J Exp Psychol 50A:664–683
Elliott D, Lyons J, Chua R, Goodman D, Carson RG (1995) The influence of target perturbations on manual aiming asymmetries in right-handers. Cortex 31:685–697
Fernandez L, Warren WH, Bootsma RJ (2006) Kinematic adaptation to sudden changes in visual task constraints during reciprocal aiming. Hum Move Sci 25:695–717
Fink PW, Foo P, Jirsa VK, Kelso JAS (2000) Local and global stabilization of coordination by sensory information. Exp Brain Res 134:12
Fitts PM (1954) The information capacity of the human motor system in controlling the amplitude of movement. J Exp Psychol 47:381–391
Guiard Y (1993) On Fitts’s and Hooke’s laws: simple harmonic movement in upper-limb cyclical aiming. Acta Psychol 82:139–159
Guiard Y (1997) Fitts’ law in the discrete vs. cyclical paradigm. Hum Move Sci 16:97–131
Haken H, Kelso JAS, Bunz H (1985) A theoretical model of phase transitions in human hand movements. Biol Cybern 51:347–356
Heath M, Hodges NJ, Chua R, Elliott D (1998) On-line control of rapid aiming movements: unexpected target perturbations and movement kinematics. Can J Exp Psychol 52:163–173
Hogan N, Sternad D (2007) On rhythmic and discrete movements: reflections, definitions and implications for motor control. Exp Brain Res 181:13–30
Huys R, Fernandez L, Bootsma RJ, Jirsa VK (2010) Fitts’ law is not continuous in reciprocal aiming. Proc Royal Soc B 277:1179–1184
Kay BA, Kelso JAS, Saltzman EL, Schöner G (1987) Space-time behavior of single and bimanual rhythmical movements: data and limit cycle model. J Exp Psychol Hum Learn Mem 13:178–192
Kelso JAS (1984) Phase transitions and critical behavior in human bimanual coordination. Amer J Physiol [Reg Integ Comp] 15:R1000–R1004
Kovacs AJ, Buchanan JJ, Shea CH (2008) Perceptual influences on Fitts’ law. Exp Brain Res 190:99–103
Lazzari S, Mottet D, Vercher JL (2009) Eye-hand coordination in rhythmical pointing. J Mot Behav 41:294–304
Levy-Tzedek S, Krebs HI, Song D, Hogan N, Poizner H (2010) Non-monotonicity on a spatio-temporally defined cyclic task: evidence of two movement types? Exp Brain Res 202:733–746. doi:10.1007/s00221-010-2176-8
Maslovat D, Chua R, Franks IM, Lee TD (2006) Anchoring strategies for learning a bimanual coordination pattern. J Mot Behav 38:17
Meyer DE, Kornblum S, Abrams RA, Wright CE, Smith JEK (1988) Optimality in human motor performance: ideal control of rapid aimed movements. Psychol Rev 95:340–370
Meyer DE, Smith JEK, Kornblum S, Abrams RA, Wright CE, Jeannerod M (1990) Speed-accuracy tradeoffs in aimed movements: toward a theory of rapid voluntary action. In: attention and performance XIII: motor representation and control. Lawrence Erlbaum Associates, New Jersey, pp 173–226
Mottet D, Bootsma RJ (1999) The dynamics of goal-directed rhythmical aiming. Biol Cybern 80:235–245
Mottet D, Bootsma RJ (2001) The dynamics of rhythmical aiming in 2D task space: relation between geometry and kinematics under examination. Hum Mov Sci 20:213–241
Mottet D, Guiard Y, Ferrand T, Bootsma RJ (2001) Two-handed performance of a rhythmical Fitts’ task by individuals and dyads. J Exp Psychol Hum Percept Perform 27:1275–1286
Plamondon R, Alimi AM (1997) Speed/accuracy trade-offs in target-directed movements. Behav Brain Sci 20:279–349
Pohl PS, Winstein CJ (1998) Age-related effects on temporal strategies to speed motor performance. J Aging Physical Act 6:45–61
Pohl PS, Winstein CJ (1999) Practice effects on the less-affected upper extremity after stroke. Arch Physical Med Rehab 80:668–675
Ryu YU, Buchanan JJ (2004) Amplitude scaling in a bimanual circle drawing task: pattern switching and end-effector variability. J Mot Behav 36:265–275
Schöner G (1990) A dynamic theory of coordination of discrete movement. Biol Cybern 63:257–270
Van Mourik AM, Beek PJ (2004) Discrete and cyclical movements: unified dynamics or separate control. Acta Psychol 117:121–138
Winstein CJ, Pohl PS (1995) Effects of unilateral brain damage on the control of goal-directed hand movements. Exp Brain Res 105:163–174
Winstein CJ, Grafton ST, Pohl PS (1997) Motor task difficulty and brain activity: investigation of goal-directed aiming using positron emission tomography. J Neurophysiol 77:1581–1594
Wu JL, Yang JJ, Honda T (2010) Fitts’ law holds for pointing movements under conditions of restricted visual feedback. Hum Move Sci 29:882–892. doi:10.1016/j.humov.2010.03.009
Acknowledgments
I would like to thank Dr. Charlie Shea of Texas A&M University for the use of his rapid aiming apparatus to collect the data for this experiment. I also would like to thank Dr. Noah Dean for help in collecting and analyzing the data.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Buchanan, J.J. Flexibility in the control of rapid aiming actions. Exp Brain Res 229, 47–60 (2013). https://doi.org/10.1007/s00221-013-3589-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-013-3589-y