
Abstract
It is typically assumed that basic features of human gait are determined by purely biomechanical factors. In two experiments, we test whether gait transition speed and preferred walking speed are also influenced by visual information about the speed of self-motion. The visual flow during treadmill locomotion was manipulated to be slower than, matched to, or faster than the physical gait speed (visual gains of 0.5, 1.0, 2.0). Higher flow rates elicit significantly lower transition speeds for both the Walk–Run and Run–Walk transition, as expected. Similarly, higher flow rates elicit significantly lower preferred walking speeds. These results suggest that visual information becomes calibrated to mechanical or energetic aspects of gait and contributes to the control of locomotor behavior.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
While much is known about the biomechanical aspects of human locomotion, important open questions remain about the perception–action couplings associated with the control of locomotor behavior. Activities such as path following, obstacle avoidance, and foot placement on irregular surfaces require information about environmental layout and are strongly affected by vision. Other aspects of locomotion such as the preferred speed of normal walking and the speed at which gait transitions occur are subject to physical constraints involving the mechanics of body movement and energetic costs. From a theoretical perspective, body-based proprioceptive or interoceptive senses should be sufficient to control these features of gait, since information about the external environment is not required. Empirical evidence is limited, however, on the specific sensory modalities that influence such behaviors and the perceptual processing involved in their control. The goal of the current experiments was to investigate the question of whether visual flowFootnote 1 affects the speed at which Walk–Run and Run–Walk transitions occur and the speed of free walking on an even surface. In both cases, we found that vision does have an influence, indicating that control of these locomotor activities is not based on body senses alone.
Human bipedal locomotion occurs with one of two classes of gaits. Walking behaves like an inverted-pendulum system, in which foot contact is maintained with the ground over the full course of a stride. Running behaves like a mass-spring “pogo stick” system in which there is no contact with the ground over a portion of each stride. While the maximum speed at which a person can walk is slower than the maximum speed at which they can run, both running and walking are possible over a substantial range of speeds. Within this range, conscious decision can switch gait between walking and running. In the absence of conscious decision, however, there is a relatively narrow band of speeds, below which walking is the preferred gait and above which running is the preferred gait. If a person starts out at a normal forward walking speed and gradually increases that speed, gait will switch to running at speeds variously reported to be between 1.89 and 2.16 m/s (Thorstensson and Roberthson 1987; Beuter and Lalonde 1989; Diedrich and Warren 1995; Hreljac et al. 2005). There is a hysteresis effect associated with human gait transitions, with the Run–Walk transition occurring at a slightly slower speed than the Walk–Run transition (Thorstensson and Roberthson 1987; Beuter and Lalonde 1989; Diedrich and Warren 1995).
Several theories about the proximal cause of a gait transition have been suggested in the literature. The “mechanical trigger” hypothesis proposes that gait transitions occur at a critical value of the vertical ground reaction force during stance, in order to reduce mechanical stresses on bone and muscle. The trot–gallop transition in the horse is consistent with this hypothesis (Farley and Taylor 1991), but it cannot account for the gallop–trot or walk–trot transitions or for the human Walk–Run transition, in which the ground reaction force actually increases at the transition (Cavagna and Kaneko 1977; Hreljac 1993). Second, a “centripetal trigger” hypothesis suggests that gait transitions occur when the centripetal force required to keep the foot on the ground during the inverted-pendulum stance phase exceeds the downward force of gravity (Alexander 1983). However, this hypothesis predicts that gait transitions should occur at a Froude number of 1.0 (a dimensionless speed variable), when they are observed to occur at about half that value (Gatesy and Biewener 1991; Kram et al. 1997).
Third, the “energetic trigger” hypothesis argues that transitions occur when the total metabolic cost of the current gait (power in cal/kg/s) surpasses that of the post-transition gait, or conversely the metabolic efficiency of the current gait (in cal/kg-m) becomes less. The speed at which human walking becomes energetically more expensive than running, about 2.2–2.3 m/s (Falls and Humphrey 1976; Margaria 1976) is indeed close to the observed transition speed of about 2.1 m/s. However, when measured in the same individuals the transition speed (2.07 m/s) is statistically lower than the energetically optimal speed (2.24 m/s; Hreljac 1993)–although subjects jump to a post-transition speed at which running is less costly than walking. Further, it is not clear that there are interoceptive mechanisms sensitive to metabolic rate with sufficient temporal precision to be useful in gait selection (Thorstensson and Roberthson 1987; Mercier et al. 1994) but see Sparrow and Newell (1998). Taken together, the evidence suggests that total metabolic cost is not the proximal trigger for a gait transition, but that the transition serves to reduce energy expenditure nonetheless.
A fourth “efficiency trigger” hypothesis proposes that gait transitions occur when the mechanical efficiency of the current gait becomes less than that of the post-transition gait (Cavagna and Kaneko 1977; Minetti et al. 1994; Kram et al. 1997). In the inverted-pendulum model of walking, the exchange of gravitational potential energy and forward kinetic energy is highly conservative (about 70%) at preferred speeds, but becomes less efficient as speed increases, requiring additional muscular power. At some point, the exchange of gravitational potential energy and elastic energy in spring-like running becomes more conservative, requiring less muscular power. Diedrich and Warren (1995, 1998) offered a dynamical interpretation of this hypothesis, in which gait transitions reflect critical points in the competition between efficient stable gaits, and exhibit properties of phase transitions. Although the cost of driving the mechanical system away from its preferred speed is reflected in the total energy expenditure, on this view the proximal trigger for a transition is proprioception about muscular effort, which is a better predictor of behavior than total metabolic cost (Prilutsky and Gregor 2001). Given that the transition speed is specified by information about muscular effort, it might also become calibrated to other forms of information about locomotor speed, such as the rate of visual flow. Finally, there is evidence that the speed at which the gait transition occurs is affected both by the length of time a person expects to be running (Daniels and Newell 2002) and by non-motor cognitive load (Daniels and Newell 2003).
Preferred gait speeds also correspond quite closely with the most energetically efficient speed (in cal/kg-m). Hoyt and Taylor (1981) observed that horses freely walk and trot close to the energetically optimal speed. In humans, the mean speed of free walking is closely predicted by the energetic minimum at 1.3 m/s (Ralston 1958; Molen et al. 1972a, b; Zarrugh et al. 1974; Margaria 1976). This also corresponds to the speed that is most mechanically conservative, requiring the least muscular effort (Cavagna et al. 1976; Turvey et al. 1996). Thus, the same sensory mechanism could potentially guide the selection of preferred walking and gait transition speeds: proprioception about the muscular contribution that drives the mechanical system. Preferred walking speed might similarly become calibrated to other information about the speed of self-motion, such as the rate of visual flow.Footnote 2
Several previous studies have looked at the effect of visual flow on preferred walking speed. Pailhous et al. (1990) reported that a backward moving pattern of dots, projected on the floor in an otherwise dark room, reduced free walking speed, while a forward moving pattern of dots did not affect walking speed. Konczak (1994), using a physical mock-up of a hallway which was placed on rollers in a manner similar to that used by Lee and Lishman (1975) found that backward movement of the hallway reduced free walking speed while forward movement of the hallway increased free walking speed. Prokop et al. (1997) and Warren et al. (1996), using a treadmill and a wide-field-of-view projection screen, coupled a visual flow pattern to the rate of actual walking. The gain factor specifying the rate of flow as a function of walking speed was modulated in a periodic manner. Walking speed increased when the rate of expansion of the visual was reduced or switched to contraction. Walking speed decreased when the rate of the visual pattern increased.
The present paper describes experiments that explore whether vision might play a role in gait transitions and extends previous studies of the influence of visual flow on the preferred speed of walking. While vision can aid in postural control during locomotion (Warren et al. 1996), the ability to carry out extended eyes-closed walking and running over open level surfaces demonstrates that vision is not necessary for such activities. Nevertheless, vision might complement body-based senses by providing an additional source of information about speed of self-motion. To our knowledge, no published study has previously addressed this question for gait transitions. In an unpublished experiment, Fatuga and Warren (1996) manipulated the change in optic flow rate on a large projection screen as participants went through a Walk–Run or Run–Walk transition on a treadmill, and found a small but reliable effect on the transition speed. Here, we reexamine that finding under better controlled conditions. While previous studies have reported visual influences on free walking speed, the present experiment featured more natural walking conditions and used better controlled visual stimuli. Our methodology utilized a custom built treadmill and wide field-of-view projection screens to decouple the visual information for speed of self-motion from the biomechanical act of walking, in a manner motivated by the work of Rieser et al. (1995). We previously demonstrated the utility of this system by replicating the results obtained by Rieser et al. (1995) and further investigated the nature of the visual information affecting perceptual-motor calibration in visually directed walking (Mohler et al. in press).
Apparatus and display
A treadmill based virtual environment
The Sarcos Treadport (Hollerbach et al. 2000) is a custom built computer controlled treadmill with a 10′ longitudinal by 6′ lateral walking surface (see Fig. 1). The Treadport supports either experimental control of belt speed or user control of walking speed, with the belt speed automatically adjusted as needed. Subjectively, the large walking surface of the Treadport provides a natural sense of walking over an extended surface, perhaps, because there is less concern for walking off the front, back, or sides of the belt.

Sarcos treadport virtual environment
Video display is implemented using three 8′ × 8′ back-projected screens with borderless mounts, with the orientation of the two side screens 120° from the main screen. This results in an ∼180° horizontal field-of-view for someone standing near the center of the belt. The viewing distance to each of the three screens is ∼2 m and the display was not projected in stereo. Extensive light shielding is used to minimize the visibility of the treadmill and other items in the laboratory, though the belt and frame of the treadmill are clearly visible to someone walking on the Treadport. For the work described here, a visual model was used that simulated an “endless” hallway patterned after a real hallway in our engineering building (see Fig. 2). Viewing was binocular. The translational position of viewpoint was based on sensed body position while eye-height was fixed. Rendering frame rate was ≥30 fps at all times. The latency between changes in the speed of the treadmill belt and changes in the speed of the visual flow was on the order of 90–170 ms, with changes in the visual speed always lagging changes in the treadmill belt speed.

The “endless hallway” displayed on three unfolded screens
Visible in Fig. 1 is a harness worn by the participant and several mechanical devices attached to the harness. One of these attachments is a safety strap, which protects the user in case of a fall. The other provides mechanical position sensing for establishing the correct viewpoint for the graphics and for situations in which locomotion speed is under user control. There is an actuator on the position sensing system that can be used to apply forces on the user in the forward and backward direction. A small spring force is applied, which tends to center the user near the longitudinal midpoint of the belt. More significantly, in situations where there are rapid changes in walking or running speed, the actuator is used to apply forces that compensate for the lack of inertial forces when a user changes the biomechanical speed of movement without undergoing any actual acceleration or deceleration. This simulation of inertial forces makes walking on the Treadport under user control of speed far more stable and natural than would otherwise be the case.
Experiment 1 gait transition speed
The goal of the first experiment was to determine whether visual information for the speed of self-motion affected the speed at which the Run–Walk and Walk–Run transitions occurred. Although visual influences on gait transitions are difficult to study in the real world, the Treadport easily allowed for the manipulation of the visual flow during locomotion. Gait transitions were induced by increasing or decreasing the speed of the treadmill at a constant rate, while visual flow was presented at a lower, matched, or higher speed (visual gains of 0.5, 1.0, or 2.0).
Method
Participants
Ten (five males and five females) psychology students participated for course credit. Each had normal or corrected-to-normal vision and no locomotion impairment. The experimental procedures were approved by the University of Utah Institutional Review Board and all participants gave their informed consent before beginning the study.
Procedure
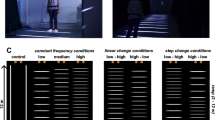
Prior to the start of the experiment, participants were trained on the Treadport to ensure that they were comfortable with the given walking and running pace and with the safety harness. The training consisted of a minute of walking at 1.0 m/s, a minute of running at 2.75 m/s and a 5-min ramp session in which the speed of the belt was ramped linearly from 1.0 to 2.75 m/s and back down to 1.0 m/s, with an acceleration of 0.1 m/s2 (each ramp lasted 35 s). The training session was done with participant’s eyes open but did not include projected visual information. After training, each participant had three 5-min ramp sessions on the Treadport while viewing the endless hallway separated by 5-min of walking around in real world hallways in our engineering building. Each ramp session required the participant to perform 16 gait transitions (eight Walk–Run and eight Run–Walk). The rate of visual flow of the visual display was either slower than, matched to, or faster than the physical walking speed (visual gains of 0.5, 1.0, 2.0). These three visual gain conditions were randomly ordered for each participant between the three ramp sessions.
During each session, participants were asked to call out “left” or “right” when double doors in the hallway fully entered the left or right screen. Single and double doors varied in their distribution throughout the hallway, with a new door appearing every 1–3 s depending on the visual condition and the particular section of the hallway. Without this explicit attention task, participants had a strong tendency to attend only to the middle of the center screen. By having them attend to the full 180° visual field-of-view we believe their subjective sense of immersion was increased. This visual attention task also served as a distractor from the ramping speed of the belt and possible associated effects such as the pulling of the harness.
The Walk–Run transition point was defined as the instant where both feet were first off the ground at the same time. The Run–Walk transition was defined as the instant where both feet were first on the ground at the same time. Each session was video-recorded to aid in determining the belt speed corresponding to these two transitions. A video editing system was used to determine the frame at which each transition occurred. Visual markers in the corner of the left screen were displayed at the beginning, peak, and end of each ramp session as a mechanism for time-registering the videotape. These markers were visible in the videotape but went unnoticed by the participants. The data reported below is based on the belt speed inferred from the time difference between the start of each acceleration or deceleration session and the known amount of acceleration or deceleration. Latency in the display system introduces random variability in these values on the order of 0.01 m/s and a systematic error between walk/run and run/walk values on the order of 0.03 m/s.
Three conditions were included in a within-subject design: Visually slower, in which the speed of visual flow was less than the mechanical walking speed, visually same, in which the speeds of visual flow and walking were matched, and visually faster, in which the speed of visual flow was greater than the walking speed. Walking speed was recorded for each visual condition for both Walk–Run and Run–Walk transition points and a repeated measures ANOVA was used to analyze the results.
Results and discussion
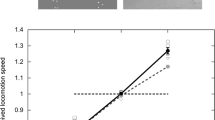
The manipulation of the visual flow had a significant influence on the gait transition speed. When the flow rate was matched to speed of walking (visual gain 1.0), the Walk–Run transition occurred at 2.11 m/s and the Run–Walk transition occurred at 1.86 m/s. These results replicate the hysteresis effect reported by other researchers (e.g., Beuter and Lalonde 1989; Diedrich and Warren 1995), in which the Walk–Run transition tends to occur at a higher speed than the Run–Walk transition. More notably, the speed of transition was modulated by the rate of visual flow (see Fig. 3). For Walk–Run, the transition occurred at 2.18 m/s for the visually slower condition (visual gain 0.5) and at 2.04 m/s for the visually faster condition (visual gain 2.0). Likewise, for Run–Walk, the transition occurred at 1.97 m/s for the visually slower condition and 1.78 m/s for the visually faster condition. Across the three conditions, the time of gait transition relative to the start of increasing or decreasing belt speed varied by 10.4–11.8 and 7.3–9.2 s, respectively. The differences in locomotion speed associated with different visual speeds are roughly an order of magnitude larger than the speed variability associated with display latency, so latency is not likely to affect conclusions about the effect of the speed of visual flow on the speed of walk/run and run/walk transitions. The nature of systematic latency was such that the actual difference between walk/run and run/walk speeds is likely to have been about 10% less than the measured value of 0.25 m/s reported above.

The average speed of gait transitions as a function of visual speed (error bars represent ±one standard error)
A repeated measures ANOVA revealed a significant effect of visual gain on the transition speed, both for the Walk–Run transition, F(2, 18) = 49.03, P < 0.01, and for the Run–Walk transition, F(2, 18) = 36.15, P < 0.01. Thus, a higher visual flow rate induced a slower transition speed, as expected. For both transitions, planned contrasts showed that the transition speed was significantly slower with a visual gain of 2.0 than in the matched condition, and was significantly faster with a visual gain of 0.5 than in the matched condition (P < 0.01 for all contrasts). Thus, though it has long been thought that gait transitions are triggered by body-based information, it appears that visual information also influences the transition point.
Experiment 2 preferred walking speed
The gait transition results demonstrated that visual information can affect the way that a person responds to forced changes in locomotor speed that are imposed by the speed of the treadmill. The next study investigated the possible influence of the visual flow when a person has control over their own walking speed.
Method
Participants
Ten (six males and four females) psychology students participated in the experiment for course credit. None had participated in experiment 1 or were otherwise familiar with the experimental apparatus. Screening for visual and locomotor impairments and informed consent were as in experiment 1.
Procedure
For this experiment, the Treadport was configured to adjust belt speed as determined by the user’s walking speed rather than forcing a particular belt speed. Each subject had 3 min to gain familiarity walking on the Treadport with no visual information projected on the screens. Following this, each subject was directed to walk comfortably in three separate visual gain conditions, such that the rate of visual flow was slower, matched to, or faster than their physical walking speed (visual gains of 0.5, 1.0, and 2.0). Subjects walked for a duration of 3 min per session. We intentionally provided no elaboration on what was meant by walking “comfortably”. They were also given a distractor task which involved pointing out double doors in the hallway by calling out “left” or “right” depending on where the double doors appeared. The practice period and each of the three conditions were separated by 5 min of walking around in the actual hallway. The conditions were presented in a different random order for each subject.
This within-subject design experiment had three conditions (visually slower, visually same, and visually faster). Walking speed was collected (every 0.5 s) for the entire 3-min session. The data used to analyze the results was an average of the walking speed over the last 2 min of each session (pilot data showed that participants walking speed was highly consistent soon after initiating walking on the treadmill). A repeated measures ANOVA was used to analyze the results.
Results and discussion
Once again the visual flow had a significant influence on locomotion, this time on preferred walking speed (see Fig. 4). The mean walking speed was 1.41 m/s in the visually slower condition, 1.29 m/s in the visually matched condition, and 1.21 in the visually faster condition. Thus, a higher rate of visual flow induced a slower walking speed, as expected. Latency between changes in the speed of the treadmill belt and changes in the speed of the visual flow is not believed to have influenced the results, since participants’ velocity was relatively constant.

The average speed of walking as a function of visual speed (error bars represent ±one standard error)
A repeated measures ANOVA revealed a significant effect of visual gain on preferred walking speed, F(2, 18) = 44.804, P < 0.01. Planned contrasts showed that the preferred speed was significantly slower with a visual gain of 2.0 than in the matched condition, and was significantly faster with a visual gain of 0.5 than in the matched condition (P < 0.01 for all contrasts). This indicates that subjects use the speed of the visual flow when choosing their own preferred walking speed. When a person is instructed to walk at a comfortable speed, their actual walking speed is influenced by the rate of visual flow present in the visual field.
General discussion
In the present experiments, the only factor that varied across conditions was the visually specified speed of self-motion. The observed shifts in gait transition speed and preferred walking speed are thus evidence for the influence of vision on both aspects of human locomotion. Gait transitions occur at slower speeds than is normally the case when the visual information indicates a forward speed greater than the actual biomechanical rate of travel. Conversely, gait transitions occur at faster speeds than normal when the visual information indicates a translational speed less than the biomechanical rate of travel. These results are consistent with a control mechanism in which the gait transition is dependent at least in part on a perceived speed of self-motion that derives from both body-based and visual senses. This implies that theories of gait transitions must incorporate sensory information that includes visual as well as body-based senses.
The situation is similar for preferred walking speed. When visual information specifies a forward speed greater than the actual biomechanical rate of travel, the speed of free walking slows. Conversely, when the visual information specifies a speed less than the biomechanical rate of travel, the speed of free walking increases. Again, a plausible explanation is that control of this locomotor activity is based on a perception of speed of self-motion that arises from a combination of body-based and visual senses. These results differ from those of Pailhous et al. (1990), Konczak (1994), and Prokop et al. (1997) in several important ways. Pailhous et al. (1990) and Konczak (1994) both used a manipulation in which there was a fixed additive or subtractive change to the visual speed of self-motion, relative to body-based indicators. This likely produced an unnatural experience for subjects, particularly at the beginning of a trial when they were stationary but the environment appeared to be moving. In contrast, in our experiment the rate of visual flow was coupled in a multiplicative manner to physical speed and subjects rarely reported that the visual information appeared “wrong”. Pailhous et al. (1990) and Konczak (1994) also used a design in which walking could be observed over only a relatively short distance. Prokop et al. (1997) observed treadmill walking over much longer durations, but the key manipulation of visual information involved continuous variations in the rate of expansion/contraction, while not supplying visual information sufficient to recover actual speed of self-motion. Since our experiment 2 involved essentially steady-state velocities, the observed behavior cannot easily be accounted for by either transient effects associated with the initiation of walking or changes in the magnitude of optic flow absent information sufficient to specify the speed of self-motion. (See Mohler et al. in press, for a related result involving perceptual-motor recalibration.)
Although these results clearly show that vision does influence these locomotor activities, it is worth noting that when the rate of visual flow was doubled or halved the gait transition points were only shifted by 3–6% and the preferred walking speed shifted ∼6–9%. Clearly both of these locomotor activities are heavily constrained by mechanistic and energetic criteria. This is consistent with research on neural control of locomotion in the adult cat, which is where most of our knowledge about the neural control of walking in humans stems from. When placed on a treadmill the adult cat is capable of walking and adapting their locomotor activities, such as varying speed and orientation, even with complete transections of the thoracic spinal cord (Eidelberg et al. 1980; Barbeau and Rossignol 1987; Lovely et al. 1990; Pearson and Rossignol 1991; Bélanger et al. 1996). Further evidence argues that the spinal cord contains the necessary circuitry for the basic locomotor rhythm by recording locomotor activity (electroneurographic recording) in an adult cat where complete transection of the spinal cord has occurred (Grillner and Zangger 1979; Pearson and Rossignol 1991). (See Drew 2000 for more on the neural mechanisms for the adaptive control of locomotion). The current results argue that while both preferred walking speed and gait transition speeds in humans may largely be constrained by low level neural circuitry, when visual information is available it is also used for adapting these locomotor activities.
What purpose is served by incorporating visual information into the control of gait transitions and walking speed, when body-based senses provide a more direct indication of muscular effort and metabolic cost? One likely explanation is that this is another example of utilizing multi-sensory integration in human perception. Adding visual information provides redundancy and the potential for increased reliability and precision over body-based senses alone. Beyond that, we speculate that visual information related to the speed of self-motion may be subject to shorter latency than body-based senses, which would be particularly important for the control of gait. This may be part of the explanation of why gait transitions occur just prior to the energetically optimal speed (Hreljac 1993; Diedrich and Warren 1995). It is conceivable that, during learning or calibration, the transition point in mechanical efficiency or energy expenditure serves to index a value of the visual flow rate corresponding to the optimal transition speed. Subsequently, the flow rate can be used to anticipate the approaching transition point in normal locomotion. A similar account might be given for the calibration of proprioception for muscular effort at the transition point. One practical consequence of our results is that care needs to be taken when quantitatively analyzing speed-dependent effects in treadmill walking and running. In most cases, such results come from stationary exercise treadmills, located in an open laboratory. This is an extreme case of our visually slower condition in which no visual motion occurs at all and can be expected to bias speed-dependent effects. (One small study comparing gait transition speeds on a treadmill and over solid ground found that Walk–Run transition speeds were less for the treadmill, Malcolm et al. 2005. This is opposite to what we would predict based on the influences of vision alone, but is likely explained by other more dominant differences between treadmill and overground locomotion.)
Finally, we note that our methodology, which decoupled visual information for the speed of travel from actual biomechanical walking speed was based on that used in a study of perceptual-motor recalibration (Rieser et al. 1995). The visual influences we observed on gait transition speeds and free walking speeds may arise out of a learned association between the visual perception of self-motion and the biomechanical effects that are optimized by changes in gait and walking speed. If so, we can expect that this calibration would adapt over time if presented with an extended exposure to mismatched visual flow and actual walking speed. Exploring such recalibration effects might provide further insights into how vision acts to influence gait selection and walking speed.
Notes
We use the more general term visual flow to refer to visual information for self-motion, not just the 2D changes in the optic array denoted by the term optic flow. The rate of visual flow refers to the speed of forward motion consistent with the time-varying image that is seen. Note that this is a characterization of the stimulus, not a perceptual property. See Mohler et al. (in press) for more detailed discussion and experimental manipulation on this topic.
References
Alexander RM (1983) Walking and running. Am Sci 72:348–354
Barbeau H, Rossignol S (1987) Recovery of locomotion after chronic spinalization in the adult cat. Brain Res 412:84–95
Bélanger M, Drew T, Provencher J, Rossignnol S (1996) A comparison of treadmill locomotion in adalt cats before and after spinal transection. J Neurophysiol 76:471–491
Beuter A, Lalonde F (1989) Analysis of a phase transition in human locomotion using singularity theory. Neurosci Res Commun 3:127–132
Cavagna GA, Kaneko M (1977) Mechanical work and efficiency in level walking and running. J Physiol 268:467–481
Cavagna GA, Thys H, Zamboni A (1976) The sources of external work in level walking and running. J Physiol 262:639–657
Daniels GL, Newell KM (2002) Perceived task expectations and the walk-run gait transition. In: Proceedings of the 23rd Army Science Conference, Orlando
Daniels GL, Newell KM (2003) Attentional focus influences the walk-run transition in human locomotion. Biol Psychol 63:163–178
Diedrich FJ, Warren WH (1995) Why change gaits? Dynamics of the walk-run transition. J Exp Psychol Hum Percept Perform 21:183–202
Drew T (2000) Neuronal mechanisms for the adaptive control of locomotion In: Proceedings of the international symposium on adaptive motion of animals and machines, Montreal, pp 1–12
Eidelberg E, Story JL, Nystel J (1980) Stepping by chronic spinal cats. Exp Brain Res 40:241–246
Falls HB, Humphrey LD (1976) Energy cost of running and walking in young women. Med Sci Sports 8:9–13
Farley CT, Taylor CR (1991) A mechanical trigger for the trot-gallop transition in horses. Science 253:306–308
Fatuga GA, Warren WH (1996) The role of visual perception with respect to gait transition patterns. Unpublished undergraduate honors thesis, Brown University
Full RJ (1989) Mechanics and energetics of terrestrial locomotion: from bipeds to polypeds. In: Wieser W, Gnaiger E (eds) Energy transformation in cells and animals, Thieme, Stuttgart, pp 175–182
Gatesy SM, Biewener AA (1991) Bipedal locomotion: effects of speed, size and limb posture in birds and humans. J Zool Lond 224:127–147
Grillner S, Zangger P (1979) On the central generation of locomotion in the low spinal cat. Exp Brain Res 34:241–261
Hollerbach JM, Xu Y, Christensen R, Jacobsen SC (2000) Design specifications for the second generation Sarcos treadport locomotion interface. In: Haptics Symposium, Proceedings of the ASME Dynamic Systems and Control Division, vol DSC-Vol. 69-2 November, Orlando, FL, USA, pp 1293–1298
Hreljac A (1993) Preferred and energetically optimal gait transition speeds in human locomotion. Med Sci Sports Exer 25:1158–1162
Hreljac A, Imamura R, Escamilla RF, Casebolt J, Sison M (2005) Preferred and energetically optimal transition speeds during backward human locomotion. J Sports sci Med 4:446–454
Konczak J (1994) Effects of optic flow on the kinematics of human gait: a comparison of young and older adults. J Motor Behav 26:225–236
Kram R, Domingo A, Ferris DP (1997) Effect of reduced gravity on the preferred walk-run transition speed. J Exp Biol 200:821–826
Kram R, Taylor R (1990) Energetics of running: a new perspective. Nature 346:265–267
Lee DN, Lishman JR (1975) Visual proprioceptive control of stance. J Hum Mov Stud 1:87–95
Lovely RG, Gregor RJ, Roy RR, Edgerton VR (1990) Weight-bearing hindlimb stepping in treadmill-exercised adult spinal cats. Brain Res 514
Malcolm P, Lenoir M, Aerts P, Segers V, Clercq DD (2005) Treadmill versus overground run to walk and walk to run transition speed in unsteady state locomotion conditions. In: Proceedings of the 20th congress of the international society of biomechanics and 29th annual meeting of the American society of biomechanics, Cleveland, p 555
Margaria R (1976) Biomechanics and energetics of muscular exercise. Clarendon Press, Oxford, England
Margaria R, Cerretelli P, Aghemo P, Sassi G (1963) Energy cost of running. J Appl Physiol 18:367–370
Mercier J, Gallais DL, Durand M, Goudal C, Micallef JP, Prefaut C (1994) Energy expenditure and cardiorespiratory responses at the transition between walking and running. Eur J Appl Physiol 69:525–529
Minetti AE, Ardigo LP, Saibene F (1994) The transition between walking and running in humans: Metabolic and mechanical aspects at different gradients. Acta Physiol Scand 150:315–323
Mohler BJ, Thompson WB, Creem-Regehr SH, Willemsen P, Pick HL Jr, Rieser JJ (2007) Calibration of locomotion due to visual motion in a treadmill-based virtual environment. ACM Transactions on Applied Perception 4(1)
Pailhous J, Ferrandez AM, Fluckiger M, Baumberger B (1990) Unintentional modulations of human gait by optic flow. Behav Brain Res 38:275–281
Pearson KG, Rossignol S (1991) Fictive motor patterns in chronic spinal cats. J Neurophysiol 66:1874–1887
Prilutsky BI, Gregor R (2001) Swing- and support-related muscle actions differentially trigger human walk-run and run-walk transitions. J Exp Psychol 204:2277–2287
Prokop T, Schubert M, Berger W (1997) Visual influence on human locomotion. Modulation to changes in optic flow Exp Brain Res 114:63–70
Rieser JJ, Pick HL Jr, Ashmead D, Garing A (1995) Calibration of human locomotion and models of perceptual-motor organization. J Exp Psychol: Hum percept perform 21:480–497
Sparrow W, Newell K (1998) Metabolic energy expenditure and the regulation of movement economy. Pyschonomic Bull Rev Psychonomic Soc 5:173–196
Thorstensson A, Roberthson H (1987) Adaptations to changing speed in human locomotion: speed of transition between walking and running. Acta Physiol Scand 131:211–214
Turvey MT, Holt KG, Obusek J, Salo A, Kugler PN (1996) Adiabatic transformability hypothesis of human locomotion. Biol Cybern 74:107–115
Warren WH, Kay BA, Yilmaz EH (1996) Visual control of posture during walking: functional specificity. J Exp Psychol: Hum Percept Perform 22:818–838
Author information
Authors and Affiliations
Corresponding author
Additional information
This material is based upon work supported by the National Science Foundation under Grant 0121084.
Rights and permissions
About this article
Cite this article
Mohler, B.J., Thompson, W.B., Creem-Regehr, S.H. et al. Visual flow influences gait transition speed and preferred walking speed. Exp Brain Res 181, 221–228 (2007). https://doi.org/10.1007/s00221-007-0917-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-007-0917-0