
Abstract
We have studied the effect of movement rate on MEG activity associated with self-paced finger movement in four subjects to determine whether the amplitude or latency of motor-evoked activity changes across a range of rates. Subjects performed a continuation paradigm at 21 distinct rates (range: 0.5–2.5 Hz) chosen because of their relevance for many types of sensorimotor coordination (e.g. musical performance). Results revealed a pair of field patterns whose topography and temporal dynamics were similar across all subjects. The strongest pattern was a movement-evoked field (MEF) that emerged during the response and exhibited one or two polarity reversals in time depending on the subject. The MEF complex was tightly coupled to the biphasic response profile but neither latency nor peak amplitude of each MEF component had significant dependence on the temporal duration between successive responses, i.e. movement rate. In contrast, the maximal amplitude of a second, weaker pattern decreased by over 50% when movement rates exceeded 1.1 Hz (inter-response interval <1 s). This pattern was characterized by a change in field line direction over the midline of the scalp and a gradual accumulation of amplitude prior to movement onset. Both characteristics are suggestive of a readiness field. The observed rate-dependent changes in this field may contribute to known transitions in sensorimotor coordination that emerge when the frequency of coordination is increased.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
We investigated the relation between movement rate and motor-related brain activity in four individuals. Although previous studies (e.g. Sadato et al. 1996, 1997; Jäncke et al. 1998) have also addressed this relation, the case studies presented here differ in two important ways. First, we focus on a range of rates typically considered rhythmic, 0.5–2.5 Hz by systematically varying movement frequency in steps of 0.1 Hz (total of 21 rates). Second, we use MEG, rather than fMRI or PET, as it provides a direct measure of neural activity and can resolve cortical changes associated with individual movements in quick succession that occur on a millisecond timescale.
The choice of this range of rates is motivated by transition phenomena observed in the timing of rhythmic sensory-motor coordination (Kelso et al. 1990). It is well established that the ability of subjects to coordinate finger movement with an external metronome in a 1:1 fashion critically depends on the rate of the metronome, and hence movement. For example, even when instructed to react to each metronome beat, subjects begin to show anticipatory timing at about 1.0 Hz (Engström et al. 1996). Transitions from syncopated (between successive beats) to synchronized (on each beat) patterns of coordination have also been observed at higher movement rates (~2.0 Hz) (Kelso 1984; Haken et al. 1985). Such transitions are associated with changes at both behavioral and neural levels (Kelso et al. 1991, 1992; Fuchs et al. 1992, 2000a; Mayville et al. 1999) but the underlying neural mechanisms remain unknown.
Recent work (Fuchs et al. 2000a; Mayville et al. 2001) using MEG suggests that timing switches may result from rate-dependent effects on the brain’s response to sensory and/or motor events. These studies showed that while cortical responses to the auditory metronome decreased in amplitude post-transition, motor-related responses remained approximately constant throughout. However, the partial overlap of auditory and motor responses as measured with MEG makes interpretation of rate effects more difficult since the aggregate field signals detected by the sensors may not truly reflect the underlying component processes.
To better understand the rate-dependence of cortical motor-related processes in isolation, here we investigated self-paced movement using a continuation paradigm. Movement fields associated with non-rhythmic, transient voluntary movement have been well described over the last 2 decades and include slow, pre-movement “readiness” fields and faster, MEF (Deecke et al. 1982; Hari et al. 1983; Cheyne and Weinberg 1989; Kristeva et al. 1991). The four case studies included here confirm not only the tight coupling between the MEF and the behavioral response shown by these and other studies (Kelso et al. 1998), but also demonstrate that MEF dynamics do not depend on movement rate in the rhythmic range studied. We also identify and describe a second, weaker motor-related field, consistent with a readiness field that, in contrast to the MEF, strongly decreases in amplitude at rates above about 1 Hz.
Materials and methods
Subjects
Four right-handed subjects (three males, one female, ages 27–41) participated in this experiment. Experimental protocols were approved by the Institutional Review Board and informed consent was obtained from all subjects.
Continuation task
In order to systematically manipulate rhythmic movement rate in a self-paced situation we employed a continuation task that consisted of two phases. Each run began with a pacing phase during which subjects were instructed to synchronize movement of their right index finger with an auditory metronome. After 20 tones (cycles), the metronome was turned off and the subjects’ task was to continue moving at the same rate until an “end of run” cue (1-s tone) occurred. This post-metronome portion is referred to as the continuation phase. The duration of the continuation phase was equal to the pacing phase (20 cycles).
Twenty-one different metronome rates were included spanning the range 0.5–2.5 Hz in steps of 0.1 Hz. Each run contained a single rate and the presentation order of the rates was randomized across runs. A total of 5–6 runs (100–120 responses) were collected per rate and subject. The whole experiment lasted about 2 h in a single session.
Experimental procedure
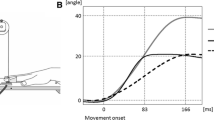
Subjects participated in the experiment while seated inside a magnetically shielded room (Vacuum Schmelze, Hanau) with their heads firmly held within the helmet housing the dewar of the magnetometer. The metronome (1 kHz, 60 ms duration tones) was delivered binaurally through plastic headphones at a volume that the subjects reported to be comfortable. Subjects responded by pressing against a sensitive air pressure cushion connected to a pressure-voltage transducer located outside the shielded room. Increases in pressure corresponded to finger flexion while a return of air pressure to baseline signified the extension (return) phase of each movement (Fig. 1a). The movement data were corrected for transmission delays given by the length of the tubing divided by the speed of sound in air. Subjects were asked to fixate at a point located approximately 2 m in front of them and to confine all eye or extraneous body movements to rest breaks between runs.

a A typical response profile (top) and its derivative (bottom). Flexion and extension of the fingertip correspond to an upward and downward deflection, respectively. Points of maximal velocity in both directions are indicated by dashed (flexion) and dashed-dotted (extension) lines. Peak flexion is at the solid line. The entire response (from onset of flexion to end of extension phase) is approximately 200 ms. b Mean response frequency for continuation phase versus condition (i.e. pacing) frequency. All four subjects (denoted by separate lines) were successfully able to internally pace their movement at the 21 distinct rates. c Variance of each subject’s response rate expressed as a percentage of the required rate. Subjects typically varied by less than 1/4 of the required period at all frequency conditions
Data acquisition
The MEG activity was recorded using a full-head magnetometer (CTF Inc., Port Coquitlam, Canada) comprising 143 Superconducting Quantum Interference Device (SquID) sensors distributed homogeneously across the head surface. Conversion to third-order gradiometers was performed in firmware using a set of reference coils. The MEG, metronome and response signals were bandpass (0.3–80 Hz) and notch (50 and 100 Hz) filtered, and digitized at a rate of 312.5 Hz. A coordinate system for each subject’s head was defined with respect to three fiduciary points: the nasion, and the left and right preauricular (whose three-dimensional coordinates were measured prior to each experiment using a set of location coils). Finally, sensor coordinates were projected into two-dimensions for topographical mapping.
Data analysis
Only data from the continuation phase of each run were analyzed, i.e. all included movements were self-paced. Prior to MEG signal processing, each subject’s behavioral performance was examined. Distributions of inter-response intervals (IRIs—defined as the time between peak finger flexions) were calculated separately for each rate condition in order to see whether subjects were successfully able to internally reproduce the metronome rate. Response cycles for which the succeeding IRI was within ±2 SD of each distribution mean were kept for MEG signal analysis.
After artifact rejection (performed via manual inspection), MEG signals associated with the retained responses were averaged to obtain event-related fields for each rate condition. Averaging was performed on a 1-s window centered at the point of maximal finger flexion. Then the averages from all 21 rates were appended together (in order of increasing rate) and subjected to a Karhunen–Loève decomposition (also known as principal components analysis or singular value decomposition). This procedure allows for splitting the spatiotemporal MEG signal into a set of orthogonal spatial patterns and corresponding time-dependent amplitudes such that reconstructing the signal through superposition of these components results in minimal error. In general, only a few patterns (and their amplitudes) are needed to account for most of the variance in the original signal (see, e.g. Fuchs et al. 1992 for details).
Results
In all four subjects, the dominant spatial field pattern that emerged from the K–L decomposition was consistent with sensorimotor activation in the left hemisphere (see below and Fig. 3). The corresponding time-dependent amplitudes, referred to from here on as the MEF, were analyzed as follows. First, the strongest evoked components (points of maximal/minimal amplitude) were identified. Second, the latency of each evoked component was calculated with respect to the peak of the (averaged) behavioral response (i.e. point of maximal flexion). Latencies between MEF components and the points of maximal response velocity in both the flexion and extension directions (Fig. 1a) were also calculated to further investigate the temporal relation between the MEF and response profile. Finally, latencies were plotted as a function of movement rate and subjected to linear regression. A one-sample t-test was used to determine whether any of the resulting slopes were significantly different from zero (thus indicating a dependence of MEF component latency on movement rate). The same statistical procedure was used to determine whether the amplitude measured at each MEF component peak had any dependence on movement rate.
We also examined amplitudes of the second decomposed field pattern as a function of rate. Since this pattern was substantially weaker than the MEF, yielding noisier time series, we did not attempt to identify individual components. The amplitude associated with each movement rate was therefore defined as the difference between maximal and minimal amplitude within the segment of the time-dependent amplitude corresponding to that rate condition. We investigated the relation of this second field to the readiness field reported in previous studies by re-averaging MEG signals using a 2-s window that extended from 1.5 s prior to 0.5 s after each response peak. These new averages were also decomposed using the Karhunen–Loève procedure to (1) ensure that the spatial pattern did not significantly change between the two average sets and (2) obtain the extended time-dependent amplitudes so that the behavior of this field pattern over the entire course of each response cycle could be described.
Task performance
Figure 1a shows a typical response measured with the pressure device. The responses were biphasic with flexion of the finger associated with an increase in pressure (upward deflection) and subsequent extension causing a decrease in pressure (downward deflection). The derivative of the response is plotted below to illustrate how the peak of each response (zero crossing) as well as points of maximal velocity in the flexion (maximum) and extension (minimum) directions were identified. As indicated by the average movement rates, all subjects were successfully able to internally pace finger movement at the required rate (Fig. 1b). The response rate for each of the four subjects never varied more than approximately 1/4 of a cycle period (Fig. 1c). These results indicate that the rate manipulation was successful.
MEG signals
The strongest field patterns occurred during (but not before or after) the behavioral response (approximate duration of the MEF response: 350 ms). This was true for all 21 rate conditions and demonstrates the predominance of movement-evoked activity for rhythmic movement. In two of the subjects (nos 1 and 2), three clear motor-evoked components were observed in sensors over the central portion of the contralateral hemisphere (see Fig. 2, highlighted boxes (top half) and time series (bottom half)). In the remaining two subjects (nos 3 and 4), only two motor-evoked components could be identified. The field pattern sampled at the peak of each component was strongly dipolar as indicated by a polarity reversal in the time series between lateral and medial sensor locations (compare left and right time series at the bottom of Fig. 2). Specifically, field lines either entered laterally and exited medially consistent with a postero-laterally directed current source (Fig. 2 top, −26 and 154 ms) or the reverse (77 ms). The dipolar structure, orientation, and location over the rolandic area of the contralateral hemisphere are consistent with MEFs I–III observed for slow transient movements (Cheyne and Weinberg 1989; Kristeva et al. 1991). The lack of a third component in two of the subjects is consistent with previous literature (Kristeva et al. 1991) and most likely reflects underlying differences in cortical morphology.

Event-related fields from subject 1 for the 1.0 Hz condition. Top: field patterns topographically sampled every 25.6 ms. Topographic maps are viewed from above the head with the nose on top. Red/yellow corresponds to magnetic field lines exiting the head whereas blue indicates entering field lines. The red line beneath each map indicates where the field was sampled with respect to the averaged response. The strongest field pattern is dipolar with maximal amplitudes over left central sensors. Corresponding time series from these sensors are plotted in the bottom half. Three movement-evoked peaks are clearly visible in both the topographic maps (highlighted in yellow) and time series
The sensorimotor evoked field occurred in every rate condition and thus emerged as the strongest decomposed spatial pattern after performing a Karhunen–Loève decomposition on all 21 event-related fields appended together (Fig. 3, left column). For subjects 1 and 2, the amount of total signal variance accounted for by this pattern was 70.8 and 62.5%, respectively. In the remaining two subjects, this field was weaker and accounted for less than half of the event-related field signal variance. The topography of the MEF pattern was very similar across subjects as indicated by the high correlation values in Table 1 (top).

Spatial patterns accounting for most of the signal variance (i.e. all 21 ERFs appended together) as calculated with a Karhunen–Loève decomposition. The proportion of variance is indicated by the eigenvalue λ beneath each map. For all four subjects, a left central dipolar pattern was dominant, though it was much stronger for subjects 1 and 2. The second strongest pattern was also similar across subjects and was characterized by a more centrally focused dipolar field
We examined the relation of both latencies and amplitudes of the MEF components to movement rate. Results are shown in Fig. 4 left and Fig. 4 right, respectively. With respect to timing, neither the latency of the MEF components (solid lines, left), nor the maximum velocities of the response (dashed lines, left) changed as a function of movement rate [no slopes are significantly differed from zero, all t(20)<0.1, P<0.05]. This confirms the tight coupling between the MEF and movement velocity profile demonstrated by previous results (Kelso et al. 1998). The data here also confirm the previously established dependence of the MEFI and III on reafferent input (Cheyne et al. 1997) and additionally suggest that the MEFII does not reflect efferent commands to the muscles as it occurs simultaneously with or after maximal velocity in the extension direction (compare green solid and blue dashed lines) and thus well after the onset of this return phase of movement. It is interesting to note that the two subjects who did not show an MEFIII exhibited a longer delay between the behavioral movement and evoked brain response (compare solid and dotted lines in latency graphs for subjects 2 and 4). Together, these results demonstrate that the timing of the MEF across the range performed here (0.5–2.5 Hz) is dependent on the biphasic response profile and not the time interval between successive responses.

Temporal dynamics, latencies and amplitudes of the dominant field patter for subjects 2 (top) and 4 (bottom). Vertical lines separate each frequency condition. Peaks in the time dependent amplitudes are marked separately for each frequency condition with red, green, and blue lines. For subjects 1 (not shown) and 2, three peaks in the time-dependent amplitudes of the MEF were identifiable. In contrast, only two were distinctly visible at all 21 frequencies for subjects 3 (not shown) and 4. On the bottom left for each subject is a plot of latency (with respect to response peak) versus frequency condition for each marked peak (solid lines). Also plotted are the corresponding latencies for points of maximal velocity in the flexion (red dotted line) and extension (blue dotted line) directions. All four subjects show a tight coupling between finger movement and the dynamics of the MEF did not depend on the movement frequency. On the bottom right are the corresponding peak amplitudes (in arbitrary units) versus frequency condition. In general, there was no dependence of peak amplitudes on the movement frequency either
The MEF amplitude also exhibited no significant dependence on movement rate for any of the four subjects [Fig. 4 right, 0.01<t(20)<1.9, P<0.05]. In general, the amplitude of the MEFI (red solid line) was the strongest, reaching between double and triple the amplitude of the other components.
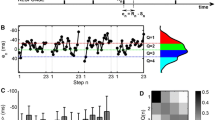
Figure 3 reveals that the second strongest field pattern was not only coherent spatially but also topographically similar across subjects (see correlations in Table 1, middle). This pattern was also dipolar and located over the central portion of the head. However, unlike the MEF pattern, the polarity reversal of this dipolar structure was located approximately over the midline (Fig. 3, 2nd column). Due to its consistency across subjects, we also investigated whether this field pattern was affected by movement rate. The graph on the bottom of Fig. 5 clearly demonstrates that the maximal amplitude (peak-to-peak) of this pattern drops by more than half at a rate of approximately 1.0 Hz and then plateaus for successive rate increases for all subjects.

Top: Response profile and time-dependent amplitudes of the second motor-related field pattern extended from 1.5 s prior to 0.5 s after the response peak. Data shown are from subject 4, for whom this pattern was strongest. The dashed line is provided as a visual guide to the approximate onset of movement. Amplitude is in arbitrary units although all 6 times series are plotted on the same scale. Bottom: maximal amplitude of the second strongest field pattern shows a sharp drop when the movement rate exceeds about 1 Hz for all subjects.
In order to obtain a better description of the timing of this field pattern prior to each response, we reaveraged the data using a 2-s window that extended from 1.5 s before to 0.5 s after the response peak. We then appended the event-related fields from 0.5 to 1.0 Hz (where the amplitudes of this pattern were strongest) and performed another K–L decomposition in order to extract the extended time-dependent amplitudes. The results of this decomposition are shown in the top half of Fig. 5 for one of the subjects. This subject was chosen because the field pattern was strongest, thus resulting in cleaner, less noisy time series (in fact, as a result of reaveraging, it accounted for more variance than the MEF pattern in this subject, demonstrating its relative strength at slow movement frequencies). The time series in Fig. 5 have been smoothed with a 60-ms moving window average in order to highlight the general amplitude trend. Dashed lines demarcate the approximate point of movement onset. The time series show a gradual accumulation of amplitude up to movement onset at which point there is a sharp drop and reversal of polarity. As the interval between successive movements becomes smaller, the wave shapes become more oscillatory due to the alternating polarity reversals before/at and after each movement. Beyond rates of 1.0 Hz (not shown) no such slow oscillations were visible, reflecting the pattern’s decreased amplitude.
Discussion
Our main question concerned whether the dynamics of the MEF exhibited changes as a function of movement rate. The results clearly indicate that there is no rate-dependence for the MEF in terms of either latencies or amplitudes of its components, at least for the broad range of rhythmic frequencies tested here (0.5–2.5 Hz). Furthermore, our findings confirm a tight coupling between time course of the MEF and behavioral response as has been previously reported (Kelso et al. 1998) and theoretically modeled (Fuchs et al. 2000b). Attempts to localize the MEF components using dipole estimates (Cheyne and Weinberg 1989; Kristeva et al. 1991) and coregistration of field activity with MRI (Kristeva-Feige et al. 1994) suggest that the MEFI and III are generated in the post-central gyrus. A contribution of peripheral reafferent input to the generation of the MEFI has also been demonstrated (Kristeva-Feige et al. 1996; Cheyne et al. 1997). In our study the MEFI and III occur shortly after maximal velocity in the flexion and extension directions, respectively. Together, these results suggest that it is reafferent information from these two muscle groups that generates the MEFI and III. A recent study by Holroyd et al. (1999) supports this conclusion. The latter work highlights the importance of a biphasic response for the generation of a second MEF reversal (MEFIII) by showing its absence in situations where subjects flex and extend on alternating beats of a metronome.
In contrast to the MEFI and MEFIII, the first reversal of the MEF (MEFII) has not been as successfully localized. Although MEFII appears to be confined to sources within the contralateral sensorimotor area, the primary input to such sources is not yet known. The timing relation between the MEFII and the response profile in this experiment suggests that it is does not reflect a motor command to the extensor muscles since in all four subjects the MEFII occurs simultaneously with or after maximal velocity in the extension direction and thus clearly after the onset of the extension phase of movement.
Interestingly, the temporal relation between the MEF and the behavioral response, though constant across movement rate, differed depending on the subject. For the first two subjects, the MEFI occurred just after maximal velocity in the flexion direction whereas for the last two it occurred approximately 50 ms later coinciding with the point of peak flexion (i.e. peak of the response). Similarly, whereas the MEFII emerged simultaneously with maximal velocity in the extension direction for subjects 1 and 2, it was delayed by approximately 20–30 ms in subjects 3 and 4. The two subject pairs also differed in the contribution of the MEF pattern, which was weaker in the latter two subjects (accounting for 45.6 and 32.0% of the total signal variance as compared to 70.8 and 62.2% for subjects 1 and 2). Moreover, whereas all three MEF components were identifiable for subjects 1 and 2, subjects 3 and 4 only showed two. Individual differences in cortical morphology (e.g. dipole orientation) could account for the relative attenuation of the MEF in subjects 3 and 4 but it is unclear how such differences could lead to temporal delays in observable MEF components.
A second question addressed by this experiment was whether other motor-related fields associated with rhythmic movement can be detected when no external pacing stimulus is present. Here, we found a second weaker field not previously observed in studies on rhythmic sensori-motor coordination (e.g. Kelso et al. 1998; Fuchs et al. 2000b; Mayville et al. 2001) that was spatially coherent and similar in topography across subjects. The time dependent amplitudes of this field were also similar across subjects for movement rates below 1.1 Hz and can be described as a slow modulation of amplitude that becomes increasingly oscillatory as the interval between successive responses gets smaller. Both the topography and temporal dynamics of the second field suggest that it corresponds to the readiness field that occurs in the foreperiod of non-rhythmic voluntary movements separated by long intervals (>3 s) (Deecke et al. 1982, 1983; Hari et al. 1983; Cheyne and Weinberg 1989).
Spatially, this second field was characterized by field lines entering in the central portion of one hemisphere and exiting in the other. Specifically, just prior to movement onset, field lines entered on the right side and exited on the left (indicated by the negative time dependent amplitudes in Fig. 5). After peak movement, the directions reversed. If the opposing field line directions in the two hemispheres are assumed to be the center of a single dipole then these time-dependent polarity changes are consistent with an anteriorly directed current source prior to movement and a posteriorly directed current after. Moreover, the lateral separation of the opposing field lines on the head surface suggests that the source would be relatively deep. In a recent MEG study, Erdler et al. (2000) report that there is an early readiness field or Bereitschaftsfeld (BF 1) preceding the onset of a complex movement sequence which is approximated by a single anteriorly directed dipole located in the SMA. As proposed by Cheyne and Weinberg (1989) they also conclude that this may actually reflect two slightly antiparallel, bilateral SMA sources whose fields are partially cancelled because the sources are in close proximity to one another (e.g. on immediately opposing surfaces of the interhemispheric fissure). Moreover, Erdler et al. suggest that the detection of pre-movement SMA activity in MEG may require a motor task that is sufficiently complex. The paradigm used in the present experiment is arguably more complex than simple finger flexion separated by long intervals (>3 s), which is not typically associated with pre-movement magnetic fields generated within the SMA. First, subjects moved rhythmically and second, they were attempting to maintain a given rate of movement as required by the task condition.
It is difficult to quantitatively characterize the temporal dynamics of the second field because of its relatively low signal-to-noise ratio, possibly due to the hi-pass filter setting used (0.3 Hz) which is higher than typically used for recording slow changes in brain/cortical activity. Furthermore, given the rhythmic nature of the movement in this task, it is not possible to separate pre-movement from post-movement periods, since post-response periods are obviously also pre-response periods for the succeeding movement. Nevertheless the gradual accumulation of field amplitude prior to movements as well as the spatial shape are consistent with the early readiness field as described by Erdler et al. (2000).
In our experiment, the amplitude of this second field pattern drops sharply once the movement rate exceeds about 1.0 Hz, thus constraining the duration between successive movements below 1 s. If the second motor field we observe does reflect planning/preparatory processes associated with rhythmic movement, an interesting question is whether or not its rate-dependent amplitude decreases have any functional consequences for the organization of motor behavior. This might be expected if the sources which generate this field are part of motor planning and/or initiation mechanisms as has been proposed for the readiness potential preceding voluntary movement in EEG (Kornhuber and Deecke 1965; Barrett et al. 1986; Kornhuber et al. 1989). While there were no observable consequences in this experiment (i.e. subjects were able to internally pace their movements equally well across all 21 rates), it is well known that the ability to coordinate finger movement with an external metronome depends crucially on rate. For example, Engström et al. (1996) observed that, for metronome rates exceeding 1.0 Hz, subjects switched from a reactive coordinative pattern to an anticipatory one in which their responses preceded each metronome beat. This occurred despite the fact that subjects were specifically instructed only to react to each metronome beat. Likewise between-beat timing patterns are also typically only stable if the rate of coordination is below about 2 Hz, beyond which subjects switch to synchronization (Kelso et al. 1990). It is possible, therefore, that changes in the strength of this field reflect underlying rate-dependent changes in motor planning mechanisms that play a role in known transitions in sensory-motor coordination.
In conclusion, we found that rhythmic self-paced finger movement is associated with a pair of neuromagnetic field patterns. The first and strongest of the two is consistent with the sensorimotor pattern previously observed for voluntary movement. The amplitudes and latencies of the MEF components depend solely on the response profile and not the interval between successive movements (for movement rates between 0.5 and 2.5 Hz). In contrast, the amplitude of the second field pattern drops by more than half when the movement rate exceeds 1.0 Hz (inter-response intervals < 1 s). This decrease may signify changes in the degree of planning necessary to move rhythmically at faster and faster rates. The striking similarity of the two principal field patterns and their corresponding time-dependent amplitudes across subjects illustrates the robustness of the spatiotemporal dynamics of MEG activity associated with rhythmic self-paced movement.
References
Barrett G, Shibasaki N, Neshige R (1986) Cortical potentials preceding voluntary movement: evidence for three periods of preparation in man. Electroencephalogr Clin Neurophysiol 63:327–339
Cheyne D, Weinberg H (1989) Neuromagnetic fields accompanying unilateral finger movements: pre-movement and movement-evoked fields. Exp Brain Res 78:604–612
Cheyne D, Endo H, Takeda T, Weinberg H (1997) Sensory feedback contributes to early movement-evoked fields during voluntary finger movements in humans. Brain Res 771:196–202
Deecke L, Weinberg H, Brickett P (1982) Magnetic fields of the human brain accompanying voluntary movement: Bereitschaftsmagnetfeld. Exp Brain Res 48:144–148
Deecke L, Boschert J, Brickett P, Weinberg H (1983) Magnetoencephalographic evidence for possible supplementary motor area participation in human voluntary movement. In: Weinberg H, Stroink G, Kaila T (eds) Biomagnetism: applications and theory. Pergamon Press, New York, pp 369–372
Engström DA, Kelso JAS, Holroyd T (1996) Reaction-anticipation transitions in human perception-action patterns. Hum Mov Sci 15:809–832
Erdler M, Beisteiner R, Mayer D, Kaindl T, Edward V, Windischberger C, Lindinger G, Deecke L (2000) Supplementary motor area activation preceding voluntary movement is detectable with a whole-scalp magnetoencephalography system. Neuroimage 11:697–707
Fuchs A, Kelso JAS, Haken H (1992) Phase transitions in the human brain: spatial mode dynamics. Int J Bifurc Chaos 2:917–939
Fuchs A, Mayville JM, Cheyne D, Weinberg H, Deecke L, Kelso JAS (2000a) Spatiotemporal analysis of neuromagnetic events underlying the emergence of coordinative instabilities. Neuroimage 12:71–84
Fuchs A, Jirsa VK, Kelso JAS (2000b) Theory of the relation between human brain activity (MEG) and hand movements. Neuroimage 11:359–369
Haken H, Kelso JAS, Bunz H (1985) A theoretical model of phase transitions in human hand movements. Biol Cybern 51:347–356
Hari R, Antervo A, Katila T, Poutanen T, Seppänen M, Tuomisto T, Varpula T (1983) Cerebral magnetic fields associated with voluntary limb movements. Nuova Cimento 2D:484–494
Holroyd T, Endo H, Kelso JAS, Takeda T (1999) Dynamics of the MEG recorded during rhythmic index-finger extension and flexion. In: Yoshimoto T, Kotani M, Kuriki S, Nakasato N, Karibe H (eds) Recent advances in biomagnetism: proceedings of the 11th international conference on biomagnetism. Tohoku University Press, Sendai, Japan, pp 446–449
Jäncke L, Specht K, Mirzazade S, Loose R, Himmelbach M, Lutz K, Shah NJ (1998) A parametric analysis of the “rate effect” in the sensorimotor cortex: a functional magnetic resonance imaging analysis in human subjects. Neurosci Lett 252:37–40
Kelso JAS (1984) Phase transitions and critical behavior in human bimanual coordination. Am J Physiol 246:R1000–R1004
Kelso JAS, DelColle JD, Schöner G (1990) Action-perception as a pattern formation process. In: Jeannerod M (ed) Attention and performance XIII. Erlbaum, Hillsdale, N.J., pp 139–169
Kelso JAS, Bressler SL, Buchanan S, DeGuzman GC, Ding M, Fuchs A, Holroyd T (1991) Cooperative and critical phenomena in the human brain revealed by multiple SQuIDs. In: Duke D, Pritchard W (eds) Measuring chaos in the human brain. World Scientific, Teaneck, N.J., pp 97–112
Kelso JAS, Bressler SL, Buchanan S, DeGuzman GC, Ding M, Fuchs A, Holroyd T (1992) A phase transition in human brain and behavior. Phys Lett A 169:134–144
Kelso JAS, Fuchs A, Lancaster R, Holroyd T, Cheyne D, Weinberg H (1998) Dynamic cortical activity in the human brain reveals motor equivalence. Nature 392:814–818
Kornhuber HH, Deecke L (1965) Hirnpotentialänderungen bei Willkürbewegungen und passiven Bewegungen des Menschen: Bereitschaftspotential und reafferente Potentiale. Pflügers Arch 284:1–17
Kornhuber HH, Deecke L, Lang W, Lang M, Kornhuber A (1989) Will, volitional action, attention and cerebral potentials in man: Bereitschaftspotential, performance-related potentials, directed action potential, EEG spectrum changes. In: Hershberger W (ed) Volitional action. Elsevier, Amsterdam, pp 107–168
Kristeva R, Cheyne D, Deecke L (1991) Neuromagnetic fields accompanying unilateral and bilateral voluntary movements: topography and analysis of cortical sources. Electroencephalogr Clin Neurophysiol 81:284–298
Kristeva-Feige R, Walter H, Lütkenhöner B, Hampson S, Ross B, Knorr U, Steinmetz H, Cheyne D (1994) A neuromagnetic study of the functional organization of the sensorimotor cortex. Eur J Neurosci 6:632–639
Kristeva-Feige R, Rossi S, Pizzella V, Sabato A, Sabato A, Tecchio F, Feige B, Romani G-L, Edrich J, Rossini PM (1996) Changes in movement-related brain activity during transient deafferentation: a neuromagnetic study. Brain Res 714:201–208
Mayville JM, Bressler SL, Fuchs A, Kelso JAS (1999) Spatiotemporal reorganization of electrical activity in the human brain associated with a timing transition in rhythmic auditory-motor coordination. Exp Brain Res 127:371–381
Mayville JM, Fuchs A, Ding M, Cheyne D, Deecke L, Kelso JAS (2001) Event-related changes in neuromagnetic activity associated with syncopation and synchronization timing tasks. Hum Brain Mapp 14:65–80
Sadato N, Ibañez V, Deiber M-P, Campbell G, Leonardo M, Hallett M (1996) Frequency-dependent changes of regional cerebral blood flow during finger movements. J Cereb Blood Flow Metab 16:23–33
Sadato N, Ibañez V, Campbell G, Deiber M-P, Le Bihan D, Hallett M (1997) Frequency-dependent changes of regional cerebral blood flow during finger movements: functional MRI compared to PET. J Cereb Blood Flow Metab 17:670–679
Acknowledgements
This study was supported by grants from the National Institute of Mental Health (MH42900 and MH19116), the National Institute of Neurological Disorders and Stroke (NS39845) and the Human Frontier Science Program. We wish to thank Professor Dr. Lüder Deecke and his staff (especially Dagmar Mayer and Gerald Lindinger) for providing technical assistance during the data collection.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Mayville, J.M., Fuchs, A. & Kelso, J.A.S. Neuromagnetic motor fields accompanying self-paced rhythmic finger movement at different rates. Exp Brain Res 166, 190–199 (2005). https://doi.org/10.1007/s00221-005-2354-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-005-2354-2